Спосіб та система, що дозволяють автоматичне приймання та пошук вантажів з метою зберігання
Формула / Реферат
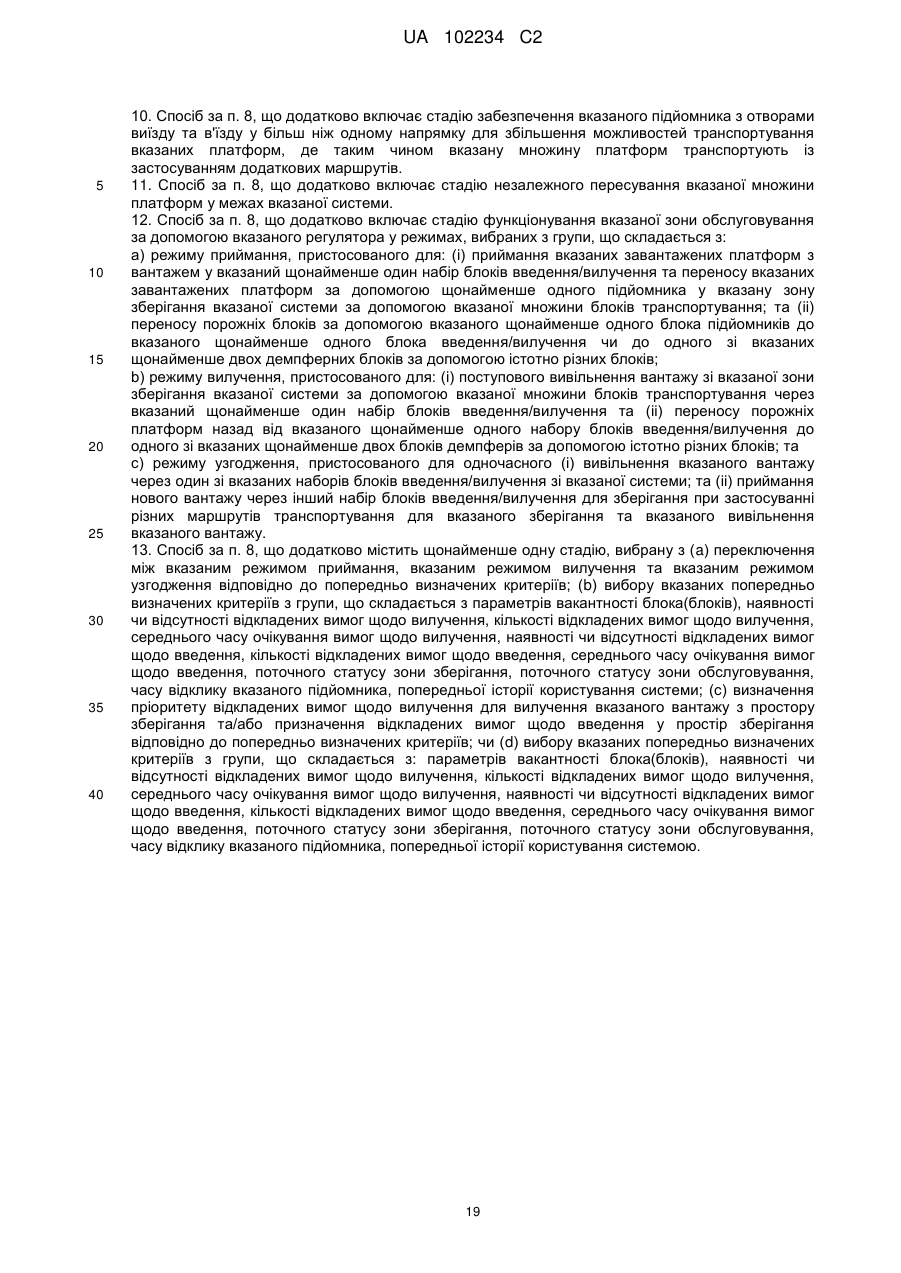
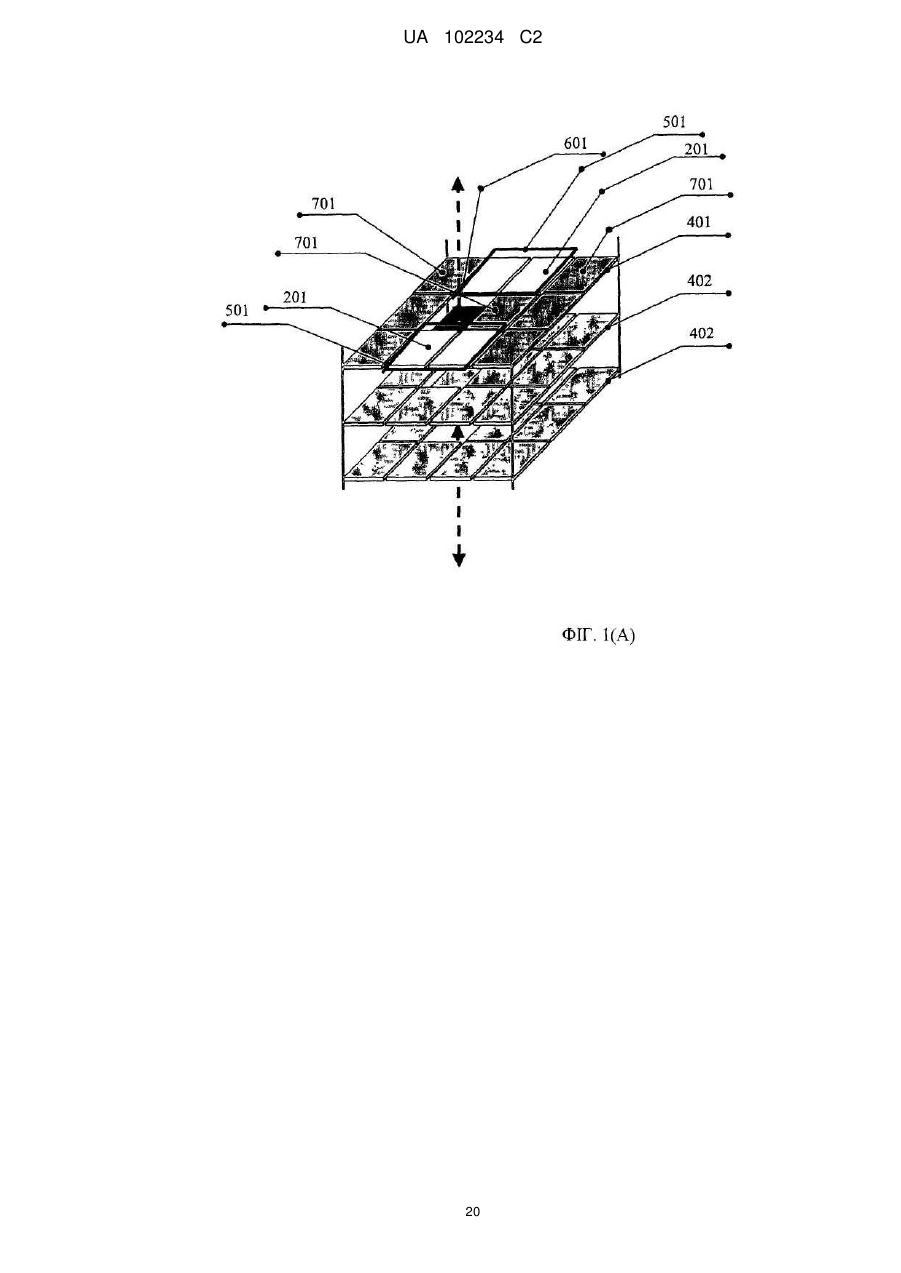
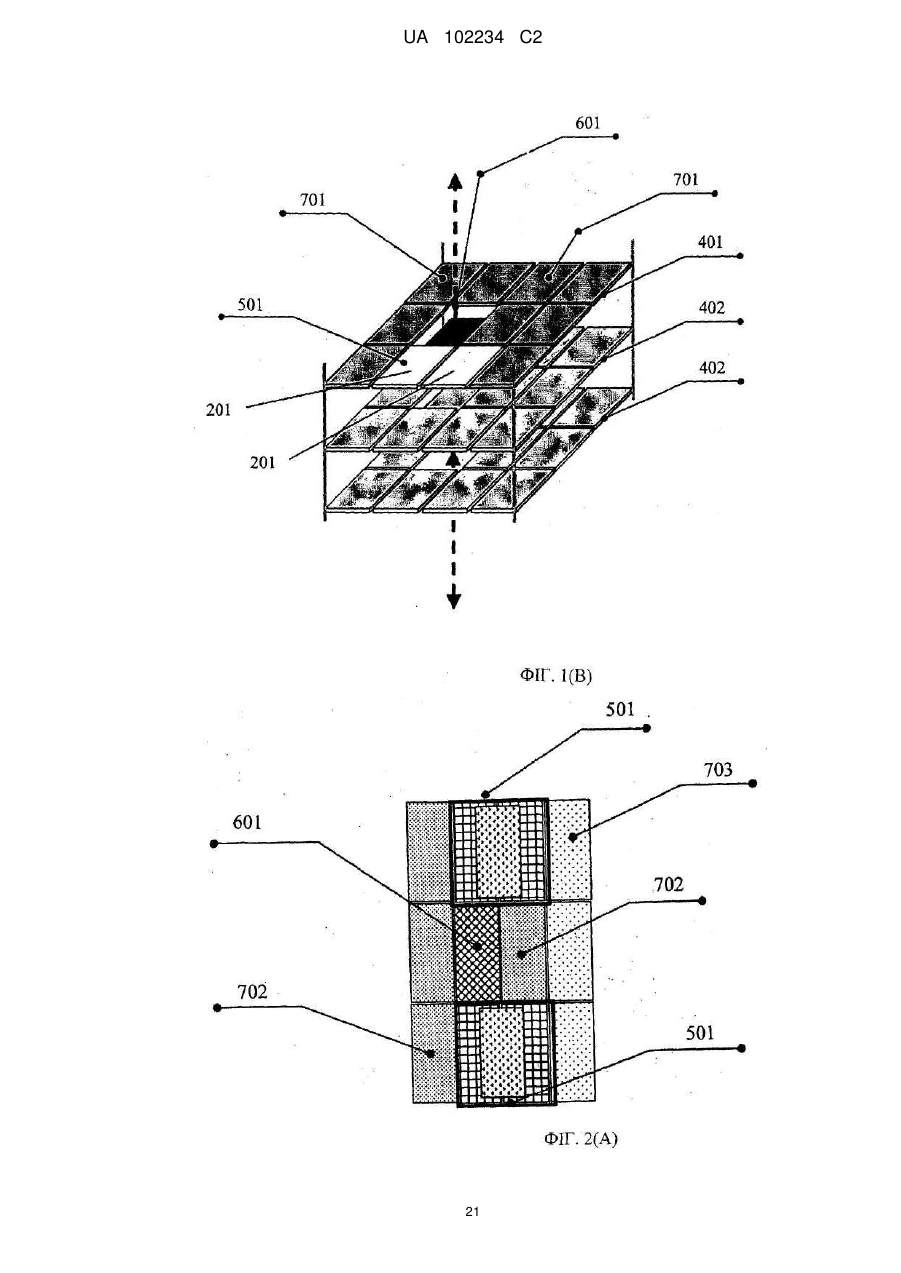
1. Система автоматизованого зберігання, приймання та пошуку вантажів, що містить щонайменше одну зону зберігання з одним чи більше просторами зберігання та щонайменше одну зону обслуговування, де вказана щонайменше одна зона обслуговування пристосована для приймання запасів вантажу, які вводять у вказану систему та для пошуку запасів вантажу, які вилучають зі вказаної системи, де вказана зона обслуговування містить:
a) множину платформ, пристосованих для конвеєрної доставки вказаного вантажу у межах вказаної системи, де вказані платформи мають щонайменше два етапи: завантажений стан з вантажем на них та порожній стан без вантажу на них;
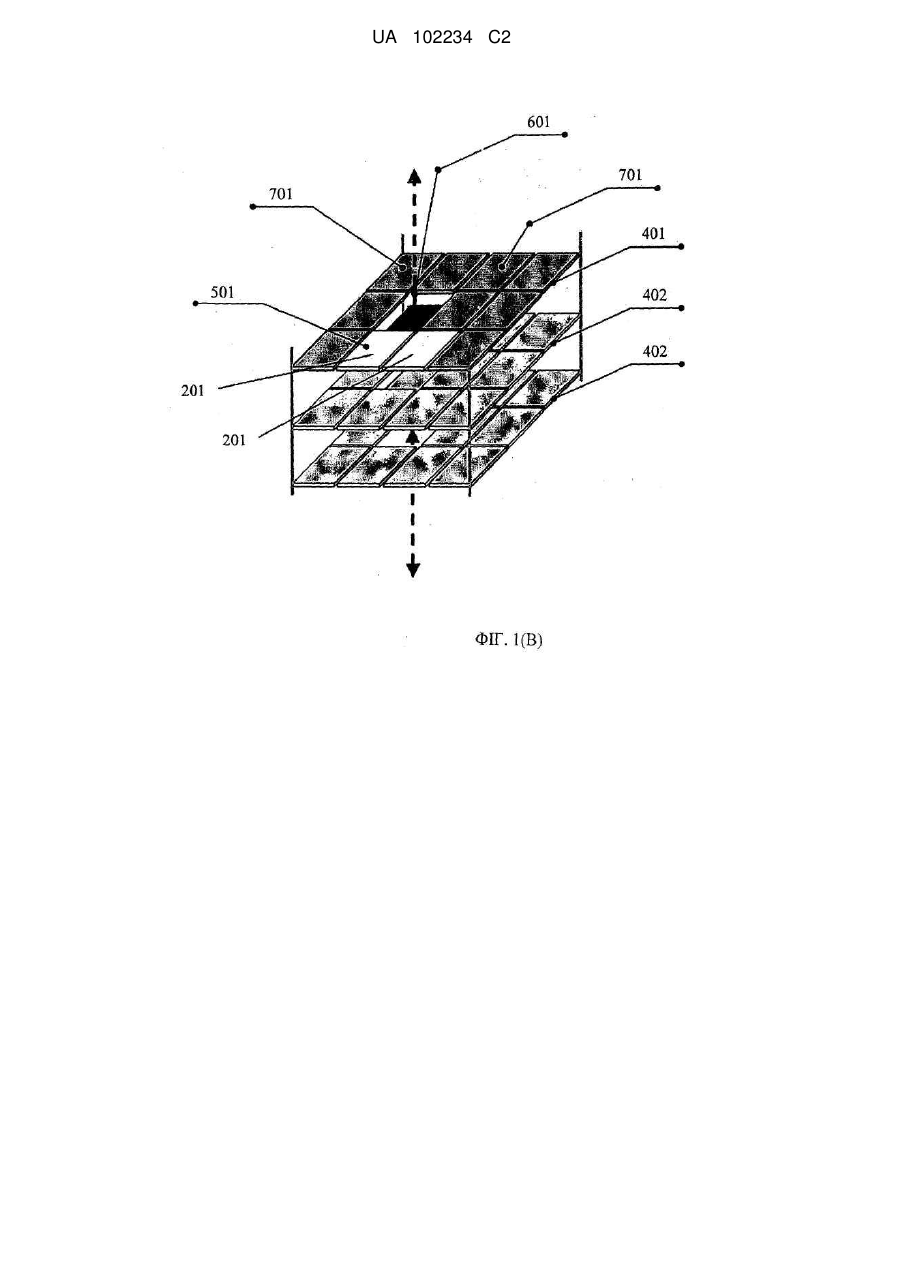
b) матрикс блоків, де вказані блоки мають попередньо визначену форму, на яких розташовано вказаний вантаж та вказані платформи; де вказаний матрикс блоків містить:
і) щонайменше один блок підйомників для транспортування вказаної платформи у різні зони вказаної системи;
іі) щонайменше один блок боксів, що містить щонайменше один набір блоків введення/вилучення; де вказаний щонайменше один набір блоків введення/вилучення містить один чи більше прилеглих блоків, де вказаний щонайменше один набір блоків введення/вилучення забезпечено засобами, пристосованими для приймання вантажу, що надходить у вказану систему на вказані платформи, та засобами, пристосованими для вивільнення вказаного вантажу зі вказаної системи;
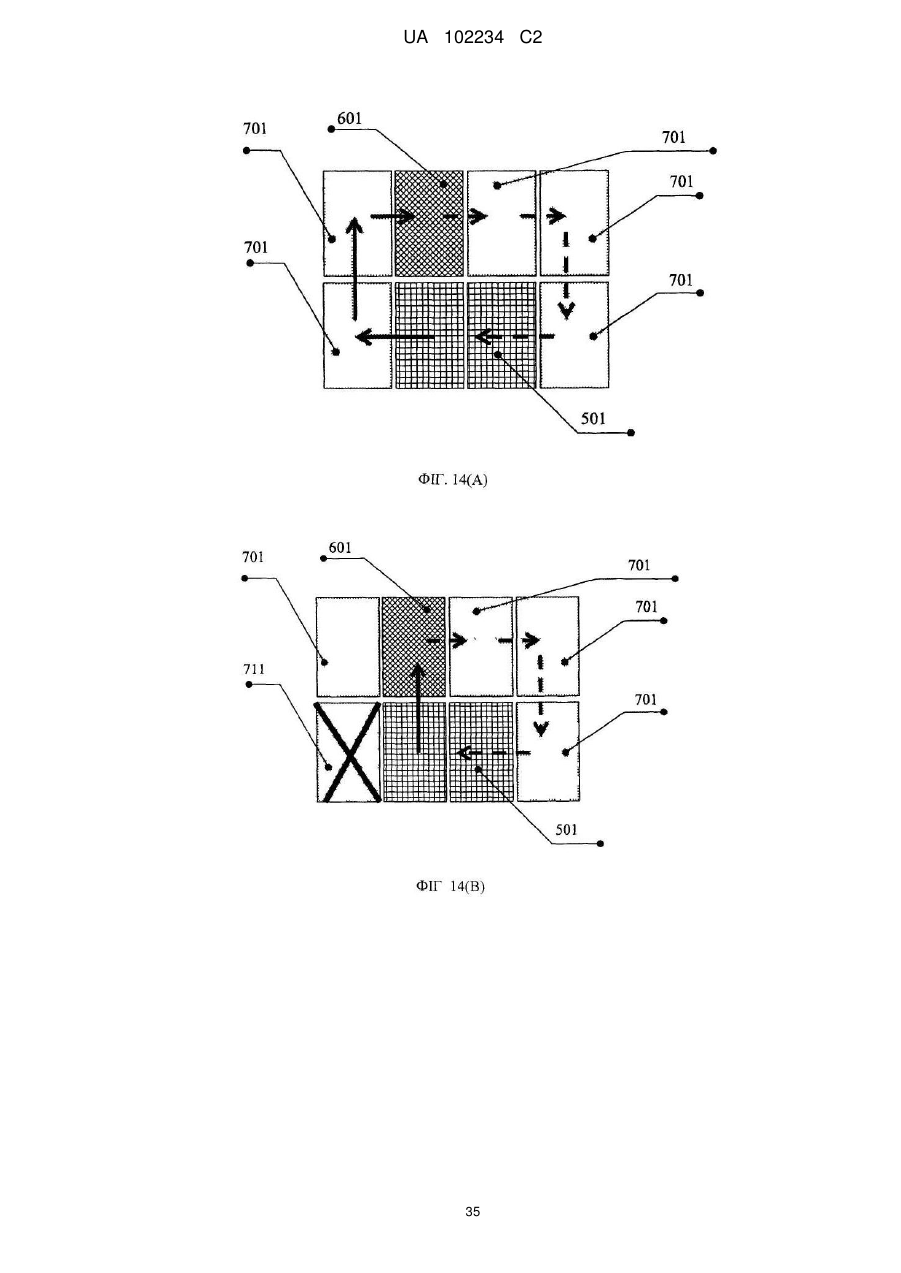
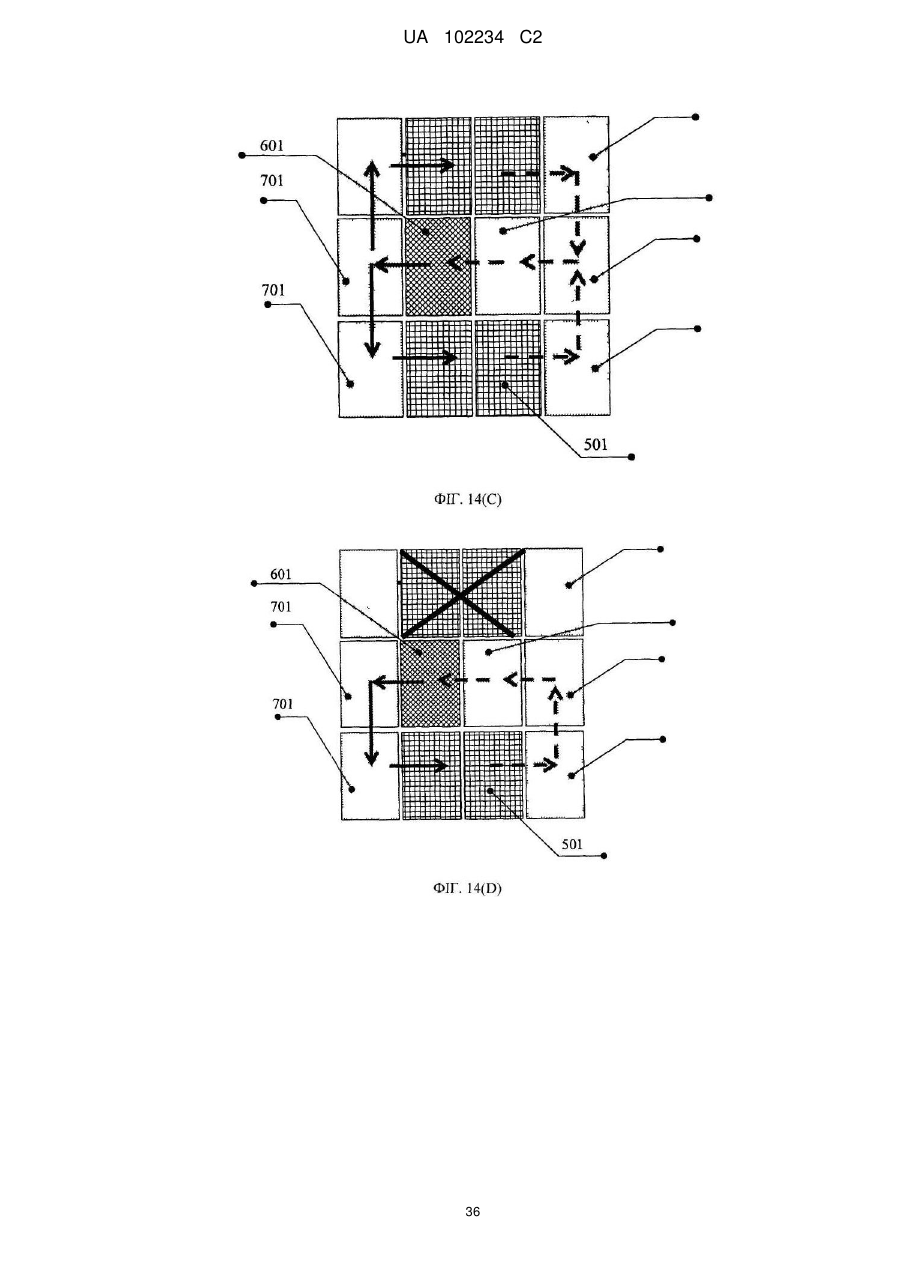
ііі) щонайменше два блоки демпферів, де щонайменше один зі вказаних щонайменше двох блоків демпферів пристосовано для транспортування порожніх платформ та щонайменше один зі вказаних блоків демпферів пристосовано для транспортування навантажених платформ, де вказані щонайменше два блоки демпферів пристосовано для дозволу транспортування вказаних платформ у щонайменше двох ортогональних напрямках вказаної, щонайменше однієї зони обслуговування;
де вказані платформи, вказаний щонайменше один блок підйомників, вказаний щонайменше один блок боксів та вказані щонайменше два блоки демпферів пристосовано для виконання вказаного зберігання, приймання та пошуку вказаного вантажу у такій послідовності, що вказаний вантаж може бути прийнятий у вказану систему, а інші вантажі можуть бути вилучені зі вказаної системи одночасно; де додатково вказаний щонайменше
один зі вказаних блоків демпферів пристосовано для транспортування порожніх платформ, додатково пристосованих для зберігання порожніх платформ та для забезпечення порожніх платформ для приймання вказаного вантажу у вказану систему.
2. Система за п. 1, де вказаний матрикс блоків додатково містить множину блоків транспортування, пристосованих для транспортування та зберігання вказаної множини платформ.
3. Система за п. 1, де вказана зона обслуговування пристосована для продовження функціонування навіть у випадку несправності менш, ніж усіх вказаних блоків підйомників, менш, ніж усіх вказаних блоків боксів, менш, ніж усіх зі вказаних блоків демпферів чи будь-яких їх комбінацій.
4. Система за п. 1, де вказаний підйомник містить отвори для виїзду та в'їзду у більш, ніж одному напрямку, щоб збільшити можливість транспортування вказаних платформ, таким чином, забезпечуючи додаткові маршрути транспортування.
5. Система за п. 1, де вказана зона обслуговування додатково містить регулятор для контролю переміщень вказаної множини платформ у межах вказаної системи; таким чином одержують незалежне пересування вказаної множини платформ.
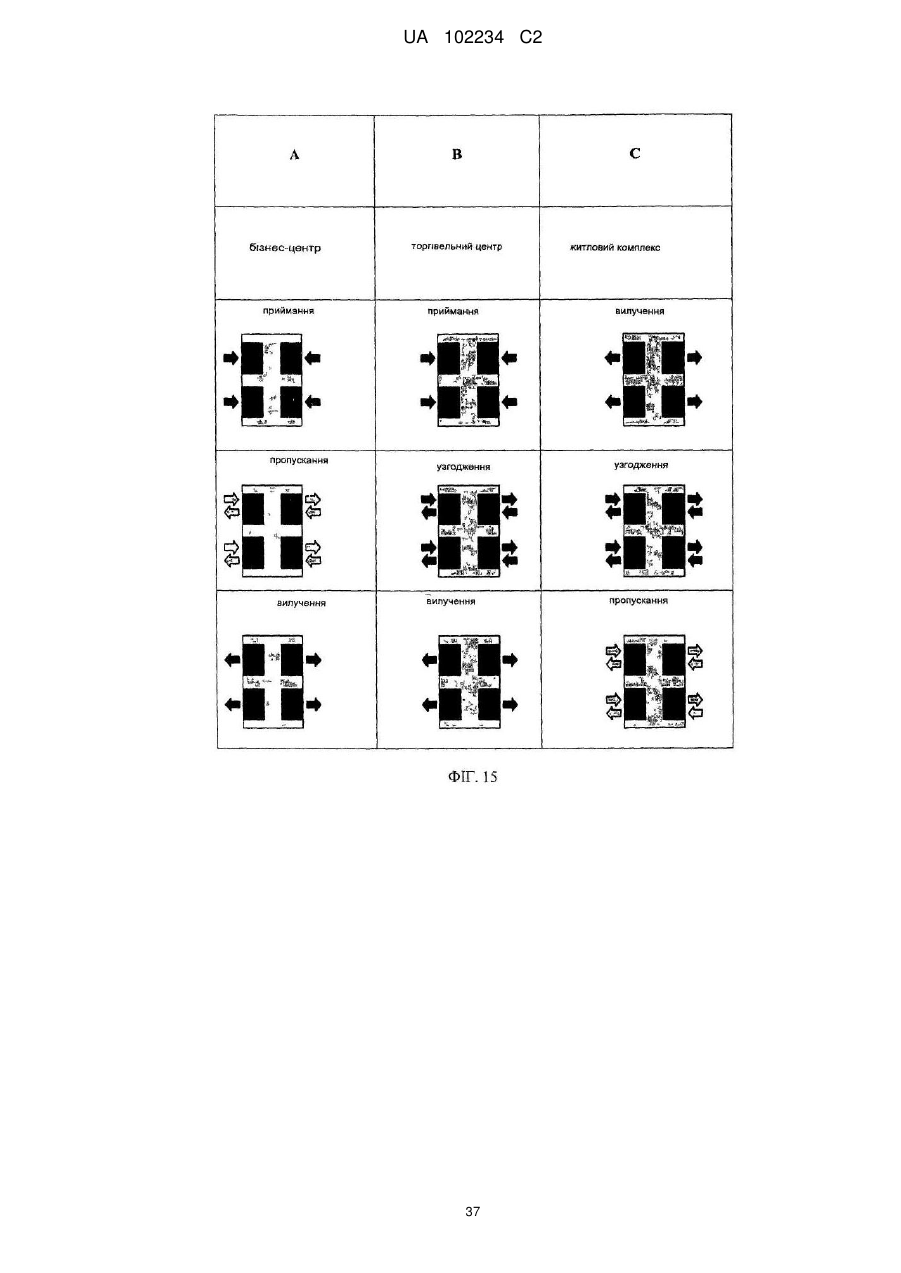
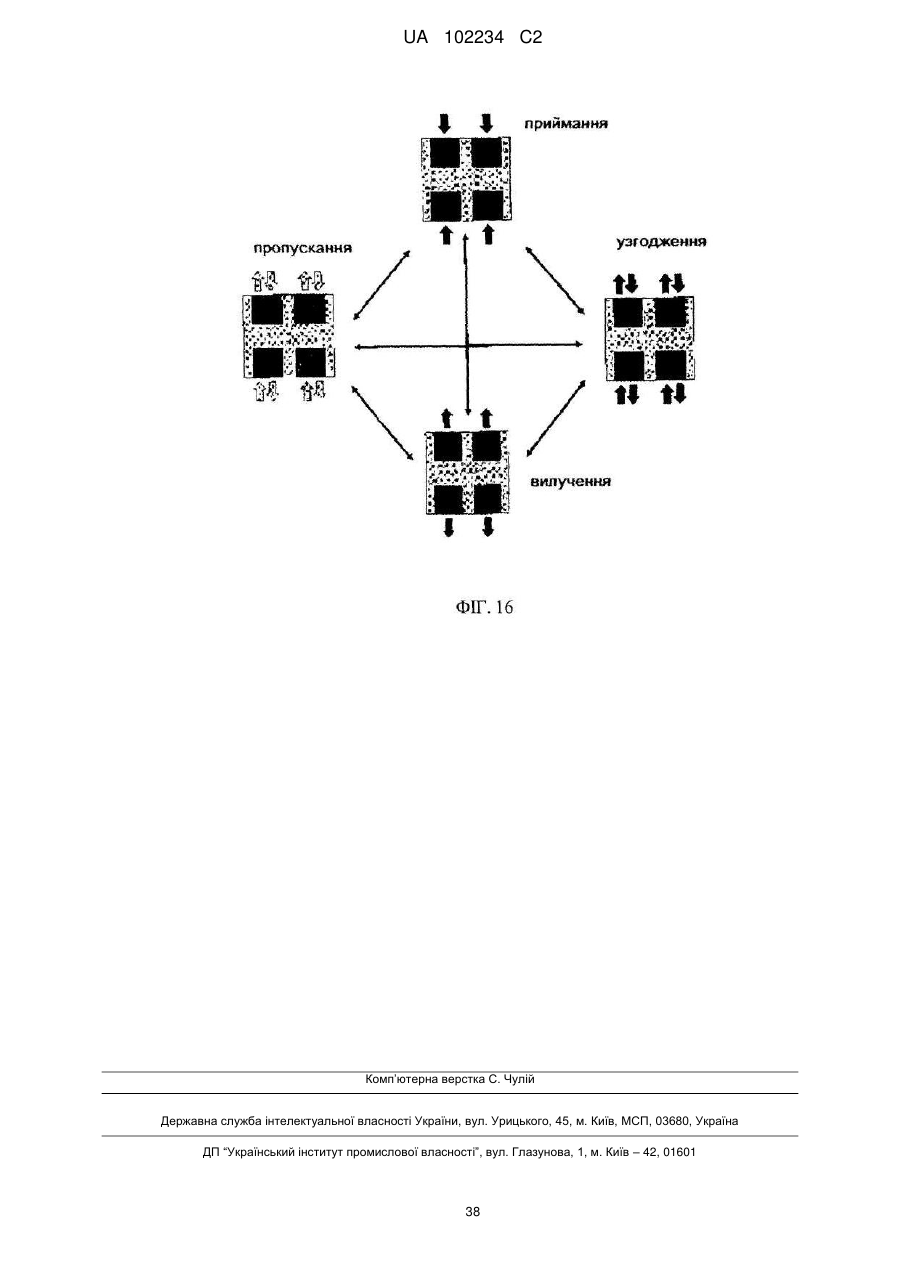
6. Система за п. 5. де вказаний регулятор функціонує у щонайменше, одному з трьох режимів у будь-який даний час, де вказані режими вибирають з групи, що складається з
a) режиму приймання, пристосованого для: (і) приймання вказаних завантажених платформ з вантажем у вказаний щонайменше один з наборів блоків введення/вилучення та переносу вказаних завантажених платформ за допомогою вказаного щонайменше одного блока підйомників у вказану зону зберігання вказаної системи за допомогою вказаної множини блоків транспортування; та (іі) переносу порожніх платформ через вказаний щонайменше один блок підйомників у вказаний щонайменше один блок введення/вилучення чи один зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків;
b) режиму вилучення, пристосованого до: (і) поступового вивільнення вантажу зі вказаної зони зберігання вказаної системи за допомогою вказаної множини блоків транспортування через вказаний щонайменше один набір блоків введення/вилучення та (іі) переносу порожніх платформ назад від вказаного щонайменше одного набору блоків введення/вилучення до одного зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків;
с) режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу через один зі вказаних наборів блоків введення/вилучення зі вказаної системи; та (іі)
приймання нового вантажу через іншій набір блоків введення/вилучення для зберігання при застосуванні річних транспортних маршрутів для вказаного вберігання та вкачаного вивільнення вказаного вантажу.
7. Система по п, 6, де регулятор пристосовано для переключення між вкачаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв; де додатково вказані попередньо визначені критерії вибирають з групи, що складається з: параметрів вакантноcті блока(блоків). наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою; де додатково вказаний регулятор пристосовано для встановлення пріоритетів відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або для призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв; де вказані попередньо визначені критерії вибирають з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутностівідкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу щодо обслуговування, часу відклику вкачаного підйомника, попередньої історії користування системою.
8. Спосіб функціонування зони обслуговування в системі автоматизованого зберігання, приймання та пошуку вантажів, де вказана зона обслуговування пристосована для приймання вантажу, який вводять у вказану систему, та для пошуку вантажу, який вилучають зі вказаної системи, де вказаний спосіб включає стадію:
А) забезпечення вказаної системи автоматизованого зберігання, приймання та пошуку, що містить щонайменше одну зону зберігання з однім чи більше просторами зберігання, та, щонайменше, одну зону обслуговування; де вказана щонайменше одна зона обслуговування пристосована для приймання запасів вантажу, що вводять у вказану систему, та для пошуку запасів вантажу, які вилучають зі вкачаної системи;
де вкачана зона обслуговування містить:
(і) множину платформ для конвеєрної доставки вказаного вантажу у межах вкачаної системи: де вкачані платформи відрізняються щонайменше двома станами: завантаженим станом з вантажем на них та порожнім станом без вантажу на них;
(іі) матрикс блоків, де вказані блоки мають попередньо визначену форму, на яких розташовано вказаний вантаж та вказані платформи; де вказаний матрикс блоків містить: (1) щонайменше один блок підйомників для транспортування вказаної платформи у різні зони вказаної системи; (2) щонайменше один блок боксів, що містить щонайменше один набір блоків введення/вилучення; де вказаний один набір блоків введення/вилучення містить один чи більше прилеглих блоків, де вказаний щонайменше один набір блоків введення/вилучення забезпечено засобами, пристосованими для приймання вантажу, що надходить у вказану систему на вказані платформи, та засобами, пристосованими для вивільнення вказаною вантажу зі вказаної системи; (3) щонайменше два блоки демпферів, де щонайменше один зі вказаних щонайменше двох блоків демпферів пристосовано для транспортування порожніх платформ, та. щонайменше, один зі вказаних блоків демпферів пристосовано для транспортування завантажених платформ, де вказані, щонайменше, два блоки демпферів пристосовано таким чином, щоб дозволити транспортування вказаних платформ у щонайменше, двох ортогональних напрямках вказаної, щонайменше, однієї зони обслуговування;
b) приймання вантажу, що надходить, у вказаний щонайменше один набір блоків введення/вилучення шляхом завантаження вказаного вантажу на вказану множину платформ;
с) транспортування вказаної множини платформ через вказаний щонайменше один блок підйомників у вказану зону зберігання за попередньо визначеним маршрутом А;
d) зберігання вказаного вантажу у вказаній зоні зберігання;
є) транспортування вказаного вантажу на вказану множину платформ через вказаний щонайменше, один блок підйомників зі вказаної зони зберігання до набору блоків введення/вилучення у вказану зону обслуговування за попередньо визначеним маршрутом В. де вказаний маршрут А істотно відрізняється від маршруту В, який застосовують на вказаній стадії (с);
f) вивільнення вказаного вантажу зі вказаного набору блоків введення/вилучення вказаної системи зберігання, приймання та пошуку вантажу:
де вказані стадії транспортування, вивільнення та приймання здійснюють у такій послідовності, що запас вказаного вантажу може бути прийнятий у вказану систему, та запас вантажів може бути вилучений зі вказаної системи одночасно; де додатково вказану стадію
(с) здійснюють за маршрутом, що є істотно відмінним під маршруту, який застосовують на вказаній стадії (g).
9. Спосіб за п. 9, що додатково включає стадію забезпечення вказаного матриксу блоків з множиною блоків транспортування для транспортування вказаного вантажу на вказаних блоках транспортування.
10. Спосіб за п. 8, що додатково включає стадію забезпечення вказаного підйомника з отворами виїзду та в'їзду у більш, ніж одному напрямку для збільшення можливостей транспортування вказаних платформ, де таким чином вказану множину платформ транспортують із застосуванням додаткових маршрутів.
11. Спосіб за п. 8, що додатково включає стадію незалежного пересування вказаної множини платформ у межах вказаної системи.
12. Спосіб за п. 8, що додатково включає стадію функціонування вказаної зони обслуговування за допомогою вказаного регулятора у режимах, вибраних з групи, що складається з:
a) режиму приймання, пристосованого для: (і) приймання вказаних завантажених платформ з вантажем у вказаний щонайменше один набір блоків введення/вилучення та переносу вказаних завантажених платформ за допомогою щонайменше одного підйомника у вказану зону зберігання вказаної системи за допомогою вказаної множини блоків транспортування; та (іі) переносу порожніх блоків за допомогою вказаного щонайменше одного блока підйомників до вказаного щонайменше одного блока введення/вилучення чи до одного зі вказаних щонайменше двох демпферних блоків за допомогою істотно різних блоків; '
b) режиму вилучення, пристосованого для (і) поступового вивільнення вантажу зі вказаної зони зберігання вказаної системи за допомогою вказаної множини блоків транспортування через вказаний щонайменше один набір блоків введення/вилучення та (іі) переносу порожніх платформ назад від вказаного щонайменше одного набору блоків введення/вилучення до одного зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків; та,
с) режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу через один зі вказаних наборів блоків введення/вилучення зі вказаної системи; та, (іі) приймання нового вантажу через інший набір блоків введення/вилучення для зберігання при застосуванні різних маршрутів транспортування для вказаного зберігання та вказаного вивільнення вказаного вантажу.
13. Спосіб за п. 8, що додатково містить щонайменше одну стадію, вибрану з (a) переключення між вказаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв; (b) вибору вказаних попередньо визначених критеріїв з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системи; (с) визначення пріоритету відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв; чи (d) вибору вказаних попередньо визначених критеріїв з групи, що складається з: параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою.
Текст
Реферат: Даний винахід належить до системи, що дозволяє автоматизоване приймання/пошук запасів вантажу з метою зберігання. Дана система застосовує щонайменше один рівень обслуговування та один чи більше рівнів зберігання. Рівень обслуговування функціонує та організований таким чином, що він здатний приймати, взаємозамінювати вантаж та вилучати вантаж одночасно та паріями. Система є резервною та дозволяє продовжене функціонування навіть, якщо деякі з її компонентів функціонують неправильно. Зона обслуговування містить (а) множину платформ для конвеєрної доставки вказаного вантажу; (b) матрикс блоків попередньо визначеної форми, на якому розташовано вказаний вантаж та вказані платформи; (с) щонайменше один блок підйомника для транспортування вказаної платформи у різні зони вказаної системи; (d) щонайменше один бокс; (e) щонайменше два демпфери, що дозволяють транспортування вказаних платформ у щонайменше двох ортогональних напрямках в кожній зі вказаних зон. UA 102234 C2 (12) UA 102234 C2 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 ГАЛУЗЬ ВИНАХОДУ Даний винахід відноситься до автоматизованого приймання та пошуку вантажів з метою зберігання. ПЕРЕДУМОВИ СТВОРЕННЯ ВИНАХОДУ Глобалізація та безперервне зростання населення у світі сприяють безперервному зростанню цін на нерухомість, що, наприклад, особливо виражено у центральних та престижних районах великих міст. Постійне зростання попиту, скорочення кількості доступної землі для будівництва та незупинна індустріалізація та модернізація великих популяцій (наприклад, у Китаї, Індії) загострюють проблему знаходження місць для паркування та підвищення цін на паркування транспортних засобів. Потреба у зоні паркування постає у бізнес-центрах (сегмент ринку А), комерційних центрах (сегмент ринку В) та житлових кварталах (сегмент ринку С), та у їх комбінаціях. Приймаючи до уваги, що існують інші райони, що страждають від скорочення місць для паркування та в яких призначення фізичних ресурсів для додаткових місць для паркування є проблематичним, особливо приймаючи до уваги кількість місць, що потребується для паркування кожної машини та дозволяє доступ для заїзду та виїзду машини. Окремо від необхідності одержати найбільш цінну площу землі, призначену для паркування машин, як приклад, або для накопичення у більш широкому сенсі, існує питання забезпечення ефективних послуг, наприклад, коли бажання транспортного засобу (як приклад) заїхати чи залишити паркування затримується якомога менше. У цьому контексті відмічено, що різні сховища та паркування зокрема мають періодичний характер обслуговування, що відрізняється різними швидкостями зберігання та пошуку у конкретні години протягом дня. Паркувальний комплекс для бізнес-центру, наприклад, має бути здатний регулювати приймання великого вхідного потоку транспортних засобів, що підлягають зберіганню, на початку робочого дня, мають бути здатні забезпечувати використання великого простору для зберігання протягом робочого дня без значного порушення часу обслуговування, та повинні бути здатні регулювати вивільнення великого потоку транспортних засобів наприкінці робочого дня. Паркувальний комплекс для торгівельного центру (сегмент ринку В) має бути здатний регулювати приймання великого потоку транспортних засобів за короткий період часу на початку робочого дня, має бути здатний забезпечувати малий час обслуговування для одночасного приймання/пошуку транспортних засобів протягом робочого дня, та має бути здатний регулювати пошуку великого потоку транспортних засобів за короткий період часу наприкінці робочого дня. Паркувальний комплекс для житлового центру (сегмент ринку С) має бути здатний регулювати вивільнення потоку транспортних засобів за короткий період часу на початку робочого дня, мають бути здатні забезпечувати швидке одночасне приймання/вивільнення транспортних засобів протягом усього дня, та належний простір для зберігання протягом ночі. Усі з вищезазначених систем повинні також мати деякою мірою справу з випадками зберігання та пошуку, що відбуваються випадковим чином протягом усього дня та можливо вночі, та будуть переважно забезпечувати мінімізований час очікування для пошуку предмету, що зберігається. У патенті США 5,669,753 забезпечено автоматизований паркувальний гараж, де одночасно паркуються та з якого виїжджають багато транспортних засобів. Після надання дозволу на в'їзд, клієнт паркує його/її транспортний засіб на платформу біля в'їзду в гараж та залишає паркування. В одноповерхових конструкціях, платформу несе самохідний транспортер до зони паркування за допомогою ряду повздовжніх та поперечних переміщень на рейках. Варіант конструкції множинного А зберігання задіє підйомний пристрій, що містить елемент підтримки платформи, що пересуває назад та вперед два сусідні поверхи. Кожну платформу несе транспортер до підйомного пристрою та кожен підйомний пристрій має механічні руки, що підтримують транспортер до того, як елемент підтримки платформи розгорне та буде незалежно підтримувати платформу, дозволяючи відведення транспортеру від підйомного пристрою. Інший транспортер, розташований на верхньому поверсі, вилучає платформу, що містить транспортний засіб з підйомного пристрою та доставляє його на його призначене місце для паркування. Введення та пошуку множини транспортних засобів відбувається одночасно таким чином, що утворення черг транспортних засобів, що в'їжджають до паркування, мінімізоване. У патенті США 6,851,921 забезпечено автоматизований паркувальний гараж, що містить багатоповерхову будівлю, що має множину стояків для зберігання транспортних засобів у зоні зберігання для зберігання навантажених чи ненавантажених платформ. Поверх, що розташовано на рівні в'їзду будівлі містить станцію заїзду/виїзду для одержання транспортного 1 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 засобу. Гараж містить станцію штабелювання платформ для зберігання ненавантажених платформ, розташованих над проходом затвору, що проходить під станцією заїзду/виїзду. Затвор платформ пересікає прохід затвору у першому положенні під станцією заїзду/виїзду для регулювання ненавантаженої платформи у станції заїзду/виїзду, та у другому положенні під станцією штабелювання платформ для штабелювання ненавантажених платформ. Гараж також містить транспортну систему для транспортування навантаженої платформи до зони зберігання. У заявці РСТ № WO07/135655 (або заявці PCT/IL2006/000589) описано систему та спосіб, що дозволяє зберігання та пошуку предметів. Система містить зону зберігання, блок введення/вилучення та регулятор. Зберігання містить множину блоків зберігання. Кожен зі вказаних блоків зберігання сконфігуровано для одержання предмету з метою зберігання у ньому. Блоки введення/вилучення сконфігуровано таким чином, щоб дозволити елементу введення/вилучення вводити та вилучати предмети з зони зберігання. Дана заявка відноситься до рівня обслуговування - або іншими словами, до рівня приймання та пошуку вантажу. Незважаючи на вказане вище, існує довготривала потреба у новому спосіб та систему, що дозволяють пошуку та одержання предметів для того, щоб дозволити зберігання, що супроводжується застосуванням мінімального простору та потребує мінімального часу через матричне розташування. Додатково, існує тривала потреба у системі та способі пошуку та розташування предметів без застосування будь-яких обмежень стосовно виду предмету, що зберігають у цій системі. СТИСЛИЙ ОПИС КРЕСЛЕНЬ Для розуміння винаходу та для того, щоб побачити, яким чином він може бути реалізований винахід на практиці, у цій заявці будуть описані відображаючи втілення, тільки шляхом необмежуючих прикладів. Ці описи не повинні бути розглянуті лише як можливості застосування даного винаходу та не є найбільш оптимальними можливостями застосування даного винаходу. Ці описи посилаються на супроводжуючі креслення, в яких: Фіг. 1А-В є тривимірними графічними ілюстраціями рівня обслуговування ("Рівень X") та рівнів зберігання ("Рівні S"). Фіг. 2А-В є графічними ілюстраціями рівня обслуговування ("Рівень X") відповідно до деяких втілень даного винаходу, зі вказаними на зони боксів, підйомників та демпферів ("демпфер 1", "демпфер 2"). Фіг. 3(А) являє собою графічну ілюстрацію платформи без механізмів транспортування, де підлога має механізм транспортування. Фіг. 3(В) являє собою графічну ілюстрацію платформи з автономним механізмом транспортування, та підлога не містить механізмів. Фіг. 3(С) являє собою графічну ілюстрацію платформи з автономним механізмом транспортування, та підлога також має механізм транспортування. Ці механізми функціонують синергично один з іншим. Фіг. 3(D) являє собою графічну ілюстрацію платформи без автономного механізму транспортування, та підлога не має механізму транспортування. Існує окремий механізм, що за необхідністю прибуває на місце. Цей механізм застосовують для транспортування платформи від блоку до блоку. Фіг. 3(Е), 3(F), 3(G), 3(H) графічними ілюстраціями різних платформ (див. вище), що утримують транспортний засіб. Фіг. 3(1), 3(J), 3(K), 3(L) графічними ілюстраціями різних платформ (див. вище), що утримують бокси та вантаж. Фіг. 4(А) та 4(В) є графічними ілюстраціями відмінностей структури блоку. На 4(А) блок переміщує механізм транспортування та у 4(В) блок складає підлогу без механізмів. Фіг. 4(С) являє собою графічну ілюстрацію транспортування платформи без механізмів між блоками, що мають механізми транспортування. Фіг. 4(D) являє собою графічну ілюстрацію транспортування платформи за допомогою механізмів транспортування між блоками, що не мають механізмів транспортування. Фіг. 5(А) та 5(В) є графічними ілюстраціями способу, яким платформа може бути транспортована у перпендикулярних напрямах. Фіг. 6(А) та 6(В) є графічними ілюстраціями мінімальної зони рівня послуг, побудованої поза блоками. Фіг. 7(А)-7(С) являє собою графічну ілюстрацію передачі між боксом та прилеглими блоками. Стрілками показано напрямки передачі. 2 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 8(А)-8(С) являє собою графічну ілюстрацію передачі між підйомниками та прилеглими блоками. Стрілками показано напрямки передачі. Фіг. 9(A)-9(D) являє собою графічну ілюстрацію різних втілень рівня обслуговування та різних маршрутів, що існують у них. Фіг. 10(А)-10(В) являє собою графічну ілюстрацію передачі між блоком та прилеглими блоками (включаючи демпферні блоки, підйомники та бокси). Фіг. 11 (А) - 11 (В) являє собою графічну ілюстрацію рівня обслуговування у режимі приймання, де показано порядок транспортування платформ, за допомогою транспортних засобів, розташованих на них, у напрямку підйомників, через демпфери ("демпфер 1"), а після цього підйомник переносить їх на рівні зберігання. Фіг. 12(А)-12(В) являє собою графічну ілюстрацію рівня обслуговування у режимі пошуку, де показано порядок транспортування платформи за допомогою транспортних засобів, розташованих на них, які переносять з рівнів зберігання для вивільнення до клієнтів. Фіг. 13 являє собою графічну ілюстрацію рівнів обслуговування у режимі узгодження, де показано порядок вивільнення транспортного засобу відповідно до запиту клієнта щодо пошуку та для приймання транспортних засобів у будівлю для зберігання. Фіг. 14(A)-14(D) ілюструють здатність системи продовжувати роботу навіть якщо один з її елементів функціонує неправильно. Фіг. 15 являє собою графічну ілюстрацію застосування чотирьох режимів - приймання, пошуку, узгодження та ємності для трьох сегментів ринку А, В та С. Зміст ілюстрації узгоджено із поясненнями, наведеними у параграфах 004-006. Фіг. 16 являє собою графічну ілюстрацію напрямів, в яких система та логічна схема можуть переключатися між режимами, приймаючи до уваги стан системи (рівні зберігання та рівень послуг) та черги для одержання/вивільнення транспортних засобів. СТИСЛИЙ ОПИС ВИНАХОДУ Даний винахід забезпечує універсальне рішення роботизованого зберігання, що включає логічну модель для функціонування автоматизованого пошуку та приймання предмету у систему та із системи для зберігання, що може функціонувати у кожному зі вказаних вище у цій заявці сегментів ринку, а також на інших ринках. По всьому опису даного винаходу, що наведений у цій заявці далі, наведено посилання шляхом прикладу, на будівлю паркування та транспортні засоби. Має бути оцінено, що даний винахід конкретно не обмежений будь-якою будівлею для зберігання, та будь-яким конкретним предметом, що має бути збережений у та вилучений з будівлі для зберігання. Однією метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, що має щонайменше, одну зону зберігання, зону обслуговування, пристосовану для приймання вантажів, які вводять у вказану систему, та для пошуку запасів вантажів, які вилучають зі вказаної системи, де вказана зона обслуговування містить: a. множину платформ, пристосованих для конвеєрної доставки вказаного вантажу; b. матрикс блоків, де вказані блоки мають попередньо визначену форму, на яких можуть бути розташовані вказаний вантаж та вказані платформи; кожен зі вказаних блоків вибирають з групи, що складається з блоку транспортування, блоку підйомників чи одного блоку з набору блоків введення/вилучення; c. щонайменше, один блок підйомників для транспортування вказаної платформи у різні зони вказаної системи; d. щонайменше, однин бокс, що містить, щонайменше, один набор блоків введення/вилучення; де вказаний набор блоків введення/вилучення містить один чи більше прилеглих блоків, та вказаний набор блоків введення/вилучення забезпечено із засобами, пристосованими дляприймання вантажу, що входить у вказану систему на вказані платформи та засобами, пристосованими для вивільнення вказаного вантажу зі вказаної системи; е. щонайменше, два демпфери, що містить, щонайменше, один із вказаних транспортних блоків, де вказаний демпфер пристосовано таким чином, щоб дозволити транспортування вказаних платформ у, щонайменше, двох ортогональних напрямах в кожній зі вказаних зон; вказані платформи, вказаний демпфер, вказаний блок підйомнику та вказаний набір блоків введення/вилучення пристосовані для здійснення вказаного зберігання, приймання та пошуку вказаного вантажу у послідовності таким чином, що вказаний вантаж може бути прийнятий у дану систему та інші вантажі можуть бути вилучені зі вказаної системи одночасно. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказана зона зберігання може продовжувати функціонування навіть у випадку несправності менш, ніж усіх зі вказаних 3 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 підйомників, менш, ніж усіх зі вказаних наборів блоків введення/вилучення, менш, ніж усіх зі вказаних демпферів чи будь-яких їх комбінацій. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказаний демпфер та/або вказаний підйомники застосовують для тимчасового зберігання вказаного вантажу. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де забезпечено вказаний підйомник із дверима для виїзду та в'їзду у більш, ніж одному напрямку, таким чином, щоб забезпечити більше можливостей для транспортування вказаних платформ, забезпечених таким чином, щоб забезпечити більшу кількість транспортних маршрутів. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказана зона зберігання додатково містить регулятор для контролю переміщень вказаних платформ та блоку підйомнику. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказаний контролер пристосовано таким чином, щоб вказані платформи рухалися незалежно. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказану попередньо вибрану форму кожного зі вказаних блоків вибирають з групи, що складається з прямокутної, кругової, трикутної, 2D чи 3D конфігурації, та будь-якої багатовимірної конфігурації правильної чи неправильної форми будь-якого розміру, форми чи виду. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де форма кожного зі вказаних блоків є істотно різною. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказаний регулятор функціонує у щонайменше, одному з трьох режимів у будь-який даний час, де вказані режими вибирають з групи, що складається з: a. режиму приймання, пристосованого для (і) приймання вказаного вантажу у вказаний набір блоків введення/вилучення, передачі вказаного вантажу за допомогою вказаного підйомнику у вказану зону зберігання для зберігання вказаного вантажу, системи приймання та пошуку за допомогою вказаної множини блоків транспортування; та (іі) передачі порожніх платформ назад за допомогою вказаного підйомнику у вказаний блок введення/вилучення за допомогою істотно різних блоків транспортування; b. режиму вилучення, пристосованого для (і) послідовного вивільнення вантажу зі вказаної зони зберігання для зберігання вказаного вантажу, системи приймання та пошуку за допомогою вказаної множини вказаних блоків транспортування та зі вказаної системи за допомогою вказаного набору блоків введення/вилучення; та, (іі) переносу порожніх платформ назад зі вказаного набору блоків введення/вилучення за допомогою істотно різних блоків транспортування у вказану зону зберігання; с. режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу через один зі вказаних наборів блоків введення/вилучення зі вказаної системи; та, (іі) приймання нового вантажу через інший набір блоків введення/вилучення для зберігання при застосуванні різних транспортних маршрутів для вказаного зберігання та вказаного вивільнення вказаного вантажу. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де регулятор пристосовано таким чином, що він переключається між вказаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказані попередньо визначені критерії вибирають з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомнику, попередньої історії користування системою. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, забезпечено вказану зону обслуговування із щонайменше, двома зі вказаних наборів блоків введення/вилучення, де вказана зона 4 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 обслуговування може продовжувати функціонування навіть у випадку несправності менш, ніж усіх зі вказаних підйомників, менш, ніж усіх зі вказаних наборів блоків введення/вилучення, менш, ніж усіх зі вказаних демпферів чи будь-яких їх комбінацій. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказаний регулятор пристосовано для визначення пріоритетів відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або для призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказані попередньо визначені критерії вибирають з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомнику, попередньої історії користування системою. Іншою метою даного винаходу є забезпечення автоматизованої системи зберігання, приймання та пошуку вантажів, як визначено вище, де вказана система містить множину зон зберігання та де кожна зона зберігання містить одне чи більше просторів зберігання. Іншою метою даного винаходу є забезпечення способу експлуатації зони обслуговування в системі автоматизованого зберігання, приймання та пошуку вантажів, де вказана зона обслуговування пристосована для приймання вантажів, що вводять у вказану систему та для пошуку вантажів, які вилучають зі вказаної системи. Даний спосіб включає стадії, вибрані, між іншим, із: a. забезпечення множини платформ, пристосованих для конвеєрної доставки вказаного вантажу; b. забезпечення матриксу блоків, де вказані блоки мають попередньо визначену форму, на якій можуть бути розташовані вказаний вантаж та вказані платформи; де кожен зі вказаних блоків вибирають з групи, що складається з транспортного блоку, блоку підйомників чи одного чи більше блоку з набору блоків введення/вилучення; c. забезпечення щонайменше, одного блоку підйомників, що транспортує вказану платформу у різні зони вказаної системи; d. забезпечення щонайменше, одного боксу, що містить, щонайменше, один набір блоків введення/вилучення; де вказаний набір блоків введення/вилучення містить один чи більше прилеглих блоків, де вказаний набір блоків введення/вилучення забезпечено із засобами, пристосованими для приймання вантажу, що входить у вказану систему, на вказані платформи, та із засобами, пристосованими для приймання вантажу, що входить до вказаної системи на вказані платформи, та засобами, пристосованими для вивільнення вказаного вантажу зі вказаної системи; е. забезпечення щонайменше, двох демпферів, що містять щонайменше, один зі вказаних блоків транспортування, де вказаний демпфер пристосовано таким чином, щоб дозволити транспортування вказаних платформ у щонайменше двох ортогональних напрямках у кожній зі вказаних зон; f. приймання запасів вантажів, що надходять у вказані набори блоків введення/вилучення на вказані платформи; g. транспортування вказаних запасів вантажів на вказані платформи за допомогою вказаних блоків транспортування до зони зберігання у вказану систему зберігання, приймання та пошуку вантажу; h. зберігання вказаних запасів вантажів у вказаній зоні зберігання у вказаній системі зберігання, приймання та пошуку вантажу; і. транспортування вказаних запасів вантажів на вказані платформи над вказаними блоками транспортування зі вказаної зони зберігання у вказану зону обслуговування за допомогою блоків транспортування, що істотно відрізняються від блоків транспортування, застосованих на вказаній стадії (g) у вказаній системі зберігання, приймання та пошуку вказаного вантажу; та, j. вивільнення вказаних запасів вантажів зі вказаних наборів блоків введення/вилучення системи зберігання, приймання та пошуку вказаного вантажу; де вказані стадії транспортування, вивільнення та приймання здійснюють у такій послідовності, що запас вказаного вантажу може бути прийнятий у вказану систему, а запас вантажів може бути вилучений зі вказаної системи одночасно; де вказану стадію (і) транспортування вказаних запасів вантажів на вказані платформи зі вказаної зони зберігання у 5 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 вказану зону обслуговування здійснюють за допомогою блоків транспортування, що істотно відрізняються від транспортних блоків, що застосовують на вказаній стадії (g). Іншою метою даного винаходу є забезпечення способу, як визначено вище, де вказана стадія транспортування включає стадію піднімання чи опускання вказаної множини платформ у різні зони вказаної системи. Іншою метою даного винаходу є забезпечення способу, як визначено вище, додатково включає стадію продовження функціонування вказаної зони обслуговування навіть у випадку несправності менш, ніж усіх вказаних блоків підйомників, менш, ніж усіх вказаних наборів блоків введення/вилучення, менш, ніж усіх вказаних демпферів чи будь-яких їх комбінацій. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію тимчасового зберігання вказаного вантажу у вказаному демпфері та/або вказаному підйомнику. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію забезпечення вказаного підйомнику із дверима для виїзду та заїзду у більш, ніж одному напрямку таким чином, щоб забезпечити більше можливостей транспортування вказаних платформ таким чином, щоб забезпечити більшу кількість маршрутів транспортування. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає забезпечення щонайменше, двох вказаних блоків підйомників, та забезпечення щонайменше, двох вказаних наборів блоків введення/вилучення, де вказана зона обслуговування може продовжувати функціонування навіть у випадку несправності одного підйомника та одного набору блоків введення/вилучення. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію контролю переміщень вказаних платформ, блоку підйомників та набору блоків введення/вилучення. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію незалежного переміщення вказаної платформи, кожного зі вказаних блоків та демпферів. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію відбору вказаних попередньо визначених просторів вказаних блоків, що вибирають з групи, що складається з прямокутної, кругової, трикутної, 2D чи 3D конфігурації, та будь-якої багатовимірної конфігурації правильної чи неправильної форми будь-якого розміру, форми чи виду. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію відбору форми кожного зі вказаних блоків, що є істотно різними. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію функціонування вказаної зони обслуговування у режимах, вибраних з групи, що складається з : a. режиму приймання, пристосованого для (і) приймання вказаного вантажу у вказаний набір блоків введення/вилучення, переносу вказаного вантажу за допомогою вказаних підйомників у вказану зону зберігання вказаної системи зберігання, приймання та пошуку вантажу за допомогою вказаної множини блоків транспортування; та (іі) переносу порожніх платформ назад за допомогою вказаного підйомнику до вказаного блоку введення/вилучення за допомогою істотно різних блоків транспортування; b. режиму вилучення, пристосованого для (і) послідовного вивільнення вантажу зі вказаної зони зберігання вказаної системи зберігання, приймання та пошуку вантажу за допомогою вказаної множини вказаних блоків транспортування зі вказаної системи за допомогою вказаного набору блоків введення/вилучення; та, (іі) переносу порожніх платформ назад зі вказаного набору блоків введення/вилучення за допомогою істотно різних блоків транспортування у вказану зону зберігання; та, с. режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу за допомогою одного зі вказаних наборів блоків введення/вилучення зі вказаної системи; та, (іі) приймання нового вантажу за допомогою іншого набору блоків введення/вилучення для зберігання при застосуванні різних маршрутів транспортування для вказаного зберігання та вказаного вивільнення вказаного вантажу. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію переключення між вказаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію відбору вказаних попередньо визначених критеріїв з групи, що складається з 6 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 параметрів вакантності блоку(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою. Іншою метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію визначення пріоритетів відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв. Ще однією метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію відбору вказаних попередньо визначених критеріїв з групи, що складається з параметрів вакантності блоку(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількість відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою. Нарешті, метою даного винаходу є забезпечення способу, як визначено вище, що додатково включає стадію послідовного приймання вказаного вантажу, та послідовного вивільнення вказаного вантажу зі вказаної системи. У той час, як даний винахід є чутливим до різних модифікацій та альтернативних форм, його конкретні втілення були продемонстровані шляхом прикладів, наведених у кресленнях, та будуть у цій заявці описані детально. Має бути зрозумілим, проте, що вона не призначена для обмеження даного винаходу конкретними описаними формами, навпаки, даний винахід призначено для охоплення усіх модифікацій, еквівалентів та альтернатив, що підпадають під суть та обсяг даного винаходу, як визначено у формулі винаходу, що додається. ДЕТАЛЬНИЙ ОПИС ВИНАХОДУ Наведений у цій заявці опис винаходу забезпечено, поряд із усіма главами даного винаходу, таким чином, щоб дозволити будь-якій особі, що є фахівцем у цій галузі, застосовувати даний винахід, та встановлює найкращі режими, охоплені винахідником даного винаходу при реалізації даного винаходу. Різні модифікації, проте, залишатимуться очевидними фахівцям у цій галузі, оскільки родові принципи даного винаходу були визначені конкретно для забезпечення сучасної модульної універсальної матриксної роботизованої системи паркування та зберігання. У наступному детальному описі, вказані численні конкретні деталі для забезпечення повного розуміння втілень даного винаходу. Проте, фахівці у цій галузі розумітимуть, що такі втілення можуть бути реалізовані на практиці без таких конкретних деталей. Посилання, наведені по всьому описі на "одне втілення" чи "втілення", означає, що конкретна ознака, структура чи характеристика, описані у зв'язку із втіленням, включені до, щонайменше, одного втілення даного винаходу. Таким чином, вирази "в одному втіленні" чи "у втіленні" у різних місцях по всьому даному описі не обов'язково усі відносяться до одного й того ж втілення чи винаходу. Додатково, конкретні ознаки, структури чи характеристики можуть бути скомбіновані будь-яким придатним чином в одному чи більше втіленнях Остаточно, терміни "містить", "включає", "має", та інш., як застосовують у даному винаході, призначені для того, щоб бути синонімами. Термін «режим узгодження» у цій заявці відноситься до режиму, описаного на Фігурі 13. Термін «режим приймання» у цій заявці відноситься до режиму, описаного на Фігурі 11. Термін «режим вилучення» у цій заявці відноситься до режиму, описаного на Фігурі 12. Термін «множина» у цій заявці відноситься до будь-якого цілого числа, що дорівнює або перевищує 1, наприклад, 2-10, особливо 2-4. Термін «вантаж» у цій заявці відноситься до об'єкту, що має бути прийнятий, збережений та знайдений. У переважному втіленні вантажем є транспортний засіб. Термін «платформа» у цій заявці відноситься до платформи, пристосованої для утримання вантажу. Платформа може бути забезпечена із транспортними засобами, що дозволяють їй рухатися. Платформа пристосована для транспортування вантажу, поміщеного на вказану платформу, зо одного місця розташування на інше місце розташування. Термін «блок» у цій заявці відноситься до модульного елементу, з якого побудована система зберігання, що складається з простору, великого настільки, щоб зберігати вантаж на або за платформою, та з якого платформа, вантаж, або платформа, що утримує вантаж, може бути перенесена до прилеглого блоку. 7 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 Термін «підйомники» у цій заявці відноситься до простору зберігання, пристосованого для пересування між різними рівнями чи різними зонами всередині рівня. Вказане пересування може бути вертикальним чи горизонтальним пересуванням між, щонайменше, двома рівнями. Термін «демпфер» у цій заявці відноситься до незайнятого блоку у паркувальній системі, загалом зарезервованої для транспортування вантажу чи порожніх платформ. Має бути відмічено, що у деяких випадках демпфер може бути застосований для тимчасового зберігання вантажу всередині. Термін «бокс» у цій заявці відноситься до набору одного чи більше блоків. У випадку, коли більш ніж один блок містить бокс, блоки є сусідніми блоками. Бокс пристосовано для приймання/ пошуку вантажу зовні системи. Термін «рівень обслуговування» у цій заявці відноситься до підлоги будівлі зберігання чи паркування, пристосованих для логістичних операцій зберігання та вилучення вантажів з будівлі зберігання чи паркування. Термін «рівень зберігання» у цій заявці відноситься до підлоги будівлі зберігання чи паркування, пристосованих для зберігання вантажу. Термін «рівень» у цій заявці відноситься до фізично відділеної підлоги будівлі чи окремої зони. Термін «різні рівні» у цій заявці відноситься до двох істотно різних рівнів, фізично відділених, чи двох різних зон. Даний винахід надає рівень обслуговування для автоматизованої системи зберігання та пошуку, придатної для зберігання вантажів чи інших об'єктів. Система заснована на матриксі блоків, на якому пересуваються платформи, здійснюючи перевезення вантажів або рухаючись порожніми. Платформи для зберігання вантажу, або приймання його для видалення з системи, або переміщення порожніми їх маршрутом для виконання однієї з цих операцій. Матриксне розташування системи є однією з її відрізняльних характеристик. Усю або майже усю зону системи займають блоки. Платформи можуть бути транспортовані (за допомогою засобів із двигунами, які або невід'ємною складовою платформ або блоків) від даного блоку до будь-якого незайнятого сусіднього блоку, в одному з двох ортогональних напрямків, що у цій заявці мають назву вперед-назад і зліва-направо. Спеціальні «демпфери» або транспортні маршрути зберігають для транспортування порожніх або навантажених платформ до або із зони зберігання, що можуть бути розташована, наприклад, на іншому поверсі будівлі. Ці демпфери аналогічні маршруту управління у традиційному паркувальному гаражі, оскільки вони забезпечують транспортні маршрути для вантажів на їх маршруті до або зі зберігання. На відміну від традиційного паркувального гаражу, проте, демпфери суворо розділені на модульні елементи, кожен з яких здатен на проведення певних операцій, таких як транспортування платформи в одному з чотирьох перпендикулярних напрямків або дозволяє таке транспортування, і розташовані в сітці з математичною точністю. Як описано вище, даний винахід відноситься до рівня обслуговування або, іншими словами, до рівня приймання та вилучення вантажів. Одним з основних переваг системи є можливість організувати різні процедури для приймання, вилучення або заміни (тобто, режим узгодження) вантажу. Таке приймання, вилучення або заміна вантажу проводять у такій послідовності, що характеризується високою ефективністю і швидкістю. Додатково, даний винахід забезпечує майже повне функціонування системи, навіть якщо є технічна несправність (або будь-які інші несправності) одного компоненту системи. Іншими словами, неправильне функціонування одного з компонентів не призведе до знищення всієї системи. Платформу, відповідно до деяких втілень даного винаходу, застосовують незалежно або у співпраці з іншими компонентами системи для утримання, переносу, зберігання, приймання та вивільнення вантажів. Платформа може містить комплексні механічні, електромеханічні чи роботизовані механізми транспортування (див. Фіг. 3А, 3Е, Фіг. 11), або такий механізм (и) може бути пов'язаний з платформою, але не з її невід'ємною частиною -(див. Фіг. 3В, 3F, 3J). Вантажем можуть бути бокси, товари, транспортний засіб та інш. Механізм транспортування дозволяє платформі пересуватися у двох перпендикулярних напрямках. Здатність до переміщення у двох перпендикулярних напрямках дозволяє кожній платформі пересуватися від одного блоку до іншого у межах рівня обслуговування та кожна платформа може таким чином пересуватися до будь-якого блоку, підйомнику та боксу. Рівень обслуговування містить, щонайменше, чотири блоки, розташовані на мінімум 22 (довжина х ширина) матриксі, включаючи бокс, підйомники та демпфери. Система містить: 8 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 a. Щонайменше, один підйомник, що пристосований для транспортування платформи зі вказаного рівня обслуговування до щонайменше, одного рівня обслуговування ; b. Щонайменше, один бокс введення/вилучення (у цій заявці: "бокс") розташований таким чином, щоб, щонайменше, його один зовнішній край був розташований на зовнішній стінці вказаної будівлі. Бокс містить щонайменше, два прилеглі блоки; та, c. Щонайменше, два демпфери, де кожен демпфер здатний забезпечити транспортування вантажів (на платформах) або порожньої платформи з одного блоку в інший щонайменше у двох ортогональних осях. Відповідно до деяких втілень даного винаходу, рівень обслуговування містить щонайменше, один бокс. Бокс є зоною на рівні обслуговування, що дозволяє умови для навантаження або розвантаження платформи. Наприклад, коли користувач системи хоче припаркувати його/її автомобіль, він їде на платформу, що знаходиться в боксі, та виходить з автомобіля. Потім платформа транспортує автомобіль на його простір зберігання. Відповідно до деяких втілень даного винаходу, блоки, що формують бокс, розташовані так, що одна з довгих сторін кожного з блоків у боксі є прилеглою до довгих сторін інших блоків, які є частиною боксу (припускаючи, що кожний блок є прямокутним). За допомогою блоків, бокс дозволяє транспортування платформ до будь-якого з щонайменш, двох блоків, прилеглих до боксу (див. Фіг. 7). Відповідно до деяких втілень даного винаходу, система може містить, щонайменш, один блок підйомнику, щоб забезпечити доступ від і до рівня обслуговування до підйомнику. Блок під назвою "підйомник" (у цій заявці: "підйомник") є місцем, яке зарезервовано для підйомників, або будь-якого іншого виду механізму, який з'єднує два різні рівні (наприклад, рівні зберігання та рівень обслуговування) або щонайменш, дві зони в різних рівнях. Відповідно до деяких втілень даного винаходу, за певних обставин, як описано, наприклад, нижче, підйомник має назву блок, і, подібно до будь-якого іншого блоку, дозволяє транспортування щонайменш, у двох перпендикулярних (ортогональних) напрямках у межах рівня обслуговування (див. Фіг. 8). Відповідно до деяких втілень даного винаходу, система може містити щонайменш, два демпферні блоки (у цій заявці: "демпфер 1", "демпфер 2"). Один з них застосовують для транспортування порожніх платформ та інший застосовують для транспортування завантажених платформ. Демпфери дозволяють, як і будь-який інший блок, транспортування щонайменш, в одному з двох взаємно перпендикулярних напрямах у межах рівня обслуговування (див. Фіг. 9). Відповідно до деяких втілень даного винаходи, за певних обставин демпферні блоки можуть бути застосовані для надання тимчасового, короткострокового зберігання платформи (або платформ), які знаходяться на шляху з боксу до підйомнику або навпаки. Як буде описано більш докладно нижче, демпферні блоки застосовують таким чином, що може бути можливим знизити залежність і необхідність синхронізації між боксом і підйомником і тим самим підвищити ефективність і, можливо, також простоту системи. Відповідно до додаткового втілення винаходу, за інших обставин, демпферні блоки можуть бути конвертовані в блоки зберігання, як буде описано більш докладно нижче. Деякі втілення даного винаходу відносяться до системи та логіки для контролю різних аспектів функціонування рівня обслуговування та рівнів зберігання, що дозволяють, у той час, коли рівні зберігання знаходяться у режимі часу обслуговування, функціонувати в рівні обслуговування в режимі приймання, що дозволяє приймання великого потоку вантажів протягом короткого періоду часу, як в боксах рівня обслуговування (припускаючи, що існують два бокси, хоча відповідно до деяких втілень може бути будь-яка кількість боксів на рівні обслуговування, починаючи з одного і вище), використовуючи при цьому "демпфер 1" та "демпфер 2". Метою режиму приймання є приймання запасів вантажу один за іншим (у подібно пакетному режиму) у бокс та з боксу через підйомник на рівень зберігання. Існує можливість переносу прийнятого вантажу на рівень зберігання з боксу до підйомнику через щонайменш, один демпфер, а також переносу порожніх платформ назад з того ж підйомнику до того ж боксу за допомогою щонайменш, одного демпферу, але іншим маршрутом. Ці два маршрути істотно не мають будь-які загальні демпфери. Вказаний інший маршрут дозволить одночасне і ефективне навантаження і розвантаження вантажів. Режим приймання дозволяє приймання великого потоку вантажів протягом короткого періоду часу, наприклад, для сегментів ринку А та В (див. Фіг. 16). Деякі втілення даного винаходу відносяться до системи та логіки для контролю різних аспектів функціонування рівня обслуговування та рівнів зберігання, що дозволить, у той час, коли рівні зберігання знаходяться у режимі часу обслуговування, щоб рівень обслуговування 9 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 функціонував у режимі вилучення, що дозволяє вивільнення великого потоку вантажів протягом короткого періоду часу, з обох боксів рівнів обслуговування, використовуючи при цьому "демпфер 1" та "демпфер 2" при розгляді вимог щодо випадкових вилучень. Більш детальна інформація про режими приймання і вилучення буде забезпечена у цій заявці. Відповідно до деяких втілень даного винаходу, платформа може знаходитись у будь-якому одному зі щонайменше, двох станів: (а)Порожня - платформа не утримує вантаж (див. Фіг. 3А, В, С та D)); (b) Навантажена платформа утримує вантаж (див. Фіг. 3(Е, F, G, та Н)) чи вантаж (Фіг. 3(I, J, K тa l)). Відповідно до деяких втілень даного винаходи, система містить рівень обслуговування, присвяченій логістичним операціям, включаючи в'їзд і виїзд вантажів, перевезення вантажів на їх шляху до або зі сховища. Один або кілька рівнів зберігання як правило, буде забезпечено в поєднанні з рівнем обслуговування, щоб дозволити зберігання вантажів. Посилання тепер зроблено на Фіг. 1А-1В, що представляють ілюстрації рівня обслуговування 401 і рівнів зберігання 402. Має бути підкреслено, що усі Фігури наведені як приклад, а рівень обслуговування може мати будь-який розмір (тобто, будь-який матрикс, що має стандартні розміри [ixj] чи будь-які нестандартні розміри, як показано на Фігурі 9D) та форму. Демпфери 701, бокси 501 та підйомники 601 промарковані на ілюстрації на рівні обслуговування. Підйомник 601 з'єднує рівні будівлі зберігання/паркування. На Фігурах 1А-1В підйомник 601 рухається вертикально з одного рівню на іншій, проте має бути відмічено, що він також може рухатися горизонтально з однієї зони рівня до іншої. У даному прикладі, 'бокси' являють собою набори двох прилеглих блоків (позначено як цифрові посилання 201). Два блоки згруповано у бокс як функціональний елемент, наприклад, оскільки два прилеглі блоки дозволяють водію транспортний засіб вивозити транспортний засіб, розвантажувати його та інш., якщо один блок являє собою очікувану середню ширину транспортного засобу. Фігури 1А-1В ілюструють різні втілення системи. На Фігурі 1А наведено 2 бокси, а на Фігурі 1В наведено один бокс. Посилання тепер зроблені на Фіг. 2А-2В, що ілюструють рівень обслуговування, демонструючи зони боксів 501, підйомників 601 та демпферів ("демпфер 1" 702 ", демпфер 2" 703) областях. "Демпфер 1" 702 застосовують для платформ з вантажем. У цій заявці оточення "демпферу 2" 703 спроектовані таким чином, що "демпфер 2" 703 застосовують як демпфер тільки для порожніх платформ. Переміщення завантажених платформ з вантажем на них, як правило, не відбувається на блоках демпферу 2 (це може відбутися за особливих обставин, як буде описано в цій заявці). "Демпфер 1", 702, таким чином, являє собою маршрут для завантажених платформ для досягнення рівня(ів) зберігання, а "Демпфер 2" являє собою маршрут для транспортування порожніх платформ назад від рівня зберігання, а бокси 501 служать в якості станцій навантаження/розвантаження. Система переважно застосовує множину боксів, які розташовані в зоні навколо підйомників на рівні обслуговування для цілей навантаження і розвантаження вантажів поза системою. Наприклад, існує два бокси 501, наведені на Фіг. 2А та один бокс 501, наведений на Фіг. 2В. Перевага використання більш, ніж одного боксу полягає в тому, що використання підйомників стає більш ефективним. Підйомники, як правило, відрізняються робочим циклом, що є більш швидким, ніж час, який зазвичай необхідний для циклу зберігання (тобто часу, необхідного для транспортування вантажів по платформі від підйомників на його простір зберігання, розвантаження вантажів з платформи у простір зберігання, і повернення платформи до підйомників.) Відповідно до додаткових втілень даного винаходу, множинні бокси забезпечують резерв та таким чином підвищують надійність, збільшуючи здатність системи до регулювання пошкоджень. Наприклад, двобоксова конфігурації має можливість продовжувати функціонування системи, навіть якщо один бокс несправний. Як приклад, якщо один з боків несправний, весь вантаж може бути вивільнений через інший бокс (або бокси, якщо їх кількість перевищує два). Таке рішення забезпечено шляхом прикладів тільки та не має тлумачитися як таке, що обмежує обсяг даного винаходу. Посилання тепер зроблені на Фіг. 3(А), графічну ілюстрацію платформи 801 без механізмів транспортування. У такому випадку підлога кожного блоку 201 має механізм транспортування. 10 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 3(В) являє собою графічну ілюстрацію платформи з автономним механізмом транспортування, тоді як підлога не має таких механізмів. Фіг. 3(С) являє собою графічну ілюстрацію платформи з автономним механізмом транспортування, тоді як підлога (наприклад, блок 201) також має механізм транспортування. Ці механізми функціонують синергично один з одним. Фіг. 3(D) являє собою графічну ілюстрацію платформи без автономного механізму транспортування, та підлога не має механізму транспортування. Окремий механізм транспортування, що прибуває на місце при необхідності, забезпечено у такому випадку. Цей механізм застосовують для транспортування платформи від блоку до блоку. Фіг. 3(Е), 3(F), 3(G), 3(H) являють собою графічні ілюстрації різних платформ (див. вище), що утримують вантаж. Фіг. 3(1), 3(J), 3(K), 3(L) являють собою графічні ілюстрації різних платформ (див. вище), що утримують бокси та вантаж. Посилання тепер зроблені на Фіг. 4(А) та 4(В), графічні ілюстрації двох різних можливих втілень структури блоку 201. У 4(А) блок містить механізм транспортування та у 4(В) блок складає підлогу без механізмів. Фіг. 4(С) являє собою графічну ілюстрацію транспортування платформи без механізмів між блоками, що мають механізми транспортування. Фіг. 4(D) являє собою графічну ілюстрацію транспортування платформ з механізмами транспортування між блоками без механізмів транспортування. Посилання тепер зроблені на Фіг. 5(А) та 5(В), графічну ілюстрацію способу, за яким платформа 801 може бути транспортована з одного положення в інше положення у двох різних перпендикулярних напрямках. Посилання тепер зроблені на Фіг. 6А, графічну ілюстрацію мінімальної зони рівня обслуговування, сконструйованої з блоків 201. Мінімальна зона має довжину двох блоків 201; а ширина становить два блоки. Посилання тепер зроблені на Фіг. 6В, графічну ілюстрацію двох різних маршрутів транспортування вантажу із зони обслуговування та у зону обслуговування. На першому маршруті, вантаж транспортують з рівня зберігання (за допомогою підйомнику 601) до боксу 501 у зону обслуговування через демпфер 701. Перший маршрут позначено пунктирними стрілками 62. На другому маршруті, вантаж транспортують з боксу 501 у зону обслуговування через демпфер 701 на рівень зберігання за допомогою підйомнику 601. Другий маршрут позначено суцільними стрілками 61. Як можна побачити на обох Фігурах, кожен вантаж може бути транспортований у двох ортогональних напрямах. Додатково, має бути підкреслено, що маршрут зберігання та маршрут вилучення є повністю незалежним без такого перекривання таким чином дозволяючи одночасне функціонування. Посилання тепер зроблені на Фіг. 7(А)-7(С), де забезпечено графічну ілюстрацію передачі між боксом 501 та прилеглим блоком 201 (що може бути демпфером 701 чи підйомником 601). Стрілки (позначено як цифрове посилання 71) показують напрями передачі платформи 801, що на Фіг. 7А займає центр боксу 501, поширюючись на два блоки, що містять бокс. Бокс 501 складається з прилеглих блоків. Має бути оцінено, що у всіх випадках одна сторона боксу 501 є прилеглою до зовнішньої межі рівня обслуговування. Фіг. 7(А) ілюструє втілення, в якому рівень обслуговування містить матрикс з 4X2 блоків; Фігура 7(В) ілюструє втілення, в якому рівень обслуговування містить матрикс з 2X2 блоків; та Фігура 7(С) ілюструє втілення, в якому рівень обслуговування містить матрикс з 5X2 блоків. Має бути відмічено, що на Фігурі 7С бокс містить 3 блоки. Посилання тепер зроблені на Фіг. 8А - 8С, ілюстрацію транспортування платформ між підйомником 601 та прилеглим блоком 201 (що може бути демпфером чи боксом). Стрілки (позначено як цифрове посилання 81) вказують напрям пересування платформи 801. Має бути підкреслено, що відповідно до переважного втілення даного винаходу підйомник 601 дозволяє пересування платформ в двох ортогональних напрямах. Фіг. 8(А) ілюструє втілення, в якому рівень обслуговування містить матрикс з 2X2 блоків; Фігура 8(В) ілюструє втілення, в якому рівень обслуговування містить матрикс з 3X3 блоків; та, Фігура 8(С) ілюструє втілення, в якому рівень обслуговування містить матрикс з 6X3 блоків. Додатково Фігура 8С ілюструє втілення, в якому існує два підйомники. Посилання тепер зроблені на Фіг. 9A-9D, ілюстрацію демпферів 701, розміщених на рівні обслуговування. Фігура 9А ілюструє мінімальну конфігурацію системи, що містить 2 блоки 201, один підйомник 601 та один бокс 501. Фігура 9В ілюструє систему, що містить конфігурацію, в якій розташовані 4X2 блоки. Фігура 9В також ілюструє два різні маршрути для зберігання та пошуку вантажу. Перший маршрут (позначений суцільними стрілками) є маршрутом зберігання, за яким вантаж одержують у систему зовні у бокс 501 та потім у підйомник 601 за допомогою демпферів 701. 11 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 Другий маршрут (позначений пунктирними стрілками) є маршрутом пошуку, за яким вантаж вилучають поза системою (тобто, з рівня зберігання через підйомник 601 на рівень обслуговування, звідти до боксу 501 за допомогою демпферу 701). Фігура 9С ілюструє втілення, в якому застосовують два бокси. Застосування двох бокси підвищує ефективність системи та перетворює систему на резервну таким чином, що функціонування системи не буде нейтралізовано неправильним функціонуванням одного боксу. Посилання тепер зроблені на Фіг. 10А-10В, де наведено передачу платформи 801 між блоком та прилеглими блоками (включаючи демпфери 701, підйомник 601 та бокси 501). Стрілками показано напрямки передачі. Має бути підкреслено, що один демпфер може бути частиною множини маршрутів. Множина маршрутів повинна мати однаковий режим (наприклад, маршрут видалення чи маршрут зберігання). Посилання тепер зроблені на Фіг. 11А-11В, де показано рівень обслуговування у режимі приймання, що вказує порядок транспортування платформ з вантажем на них (див. звичайні стрілки), до підйомників 601, за допомогою демпферів ("демпфер 1" 702), тоді як після цього підйомник переносить їх на рівні зберігання. На цій Фігурі показано транспортування порожніх платформ (див. стрілки у вигляді ламаної лінії), що прибувають за допомогою підйомника 601 з рівня зберігання на рівень обслуговування, замість повних платформ. Маршрут порожніх платформ проходить від підйомників через "демпфер 1" 712 чи "демпфер 2" 703 до боксів 502, 503. Як показано на Фіг. 11, та відповідно до деяких втілень даного винаходу, рівень обслуговування може містити два бокси, та маршрути передаточної циркуляції можуть перекриватися у "зоні зіткнень" (див. Фіг. 12(В)). Відповідно до деяких втілень даного винаходу, у межах зони зіткнень кожен з двох маршрутів циркуляції може бути керований таким чином, що функціонує у різних режимах експлуатації. Коли один з боксів починає отримувати новий вантаж, інші знаходяться усередині виконання іншої дії, наприклад, переносу вантажу, що надає платформам можливість переносити вантажі для досягнення підйомниками обох боксів без перешкод або з меншими перешкодами. Це також надає порожнім платформам, що прибувають на рівень обслуговування з того ж самого підйомнику, замінювати повні платформи, досягаючи двох боксів бокси без перешкод або з меншими перешкодами. Однією з практичних переваг системи є те, що негайно або протягом обмеженого періоду часу після приймання вантажу до боксу, його переносять до демпферу для очікування підйомнику, та одночасно, інша порожні платформа входить у бокс. За істотно короткий час бокс готовий до приймання наступного вантажу, та це може відбуватися багаторазово. Це рішення забезпечено тільки шляхом прикладів та не повинно тлумачитися як таке, що обмежує обсяг даного винаходу. Фіг. 12 являє собою графічну ілюстрацію рівня послуг у режимі вилучення, де показано порядок транспортування платформ, з вантажем на них (див. звичайні стрілки), які переносять з рівнів зберігання на рівень обслуговування для того, щоб їх вивільнити для клієнтів. Транспортування відбувається через підйомник 601, через "демпфер 1" 702 у напрямку боксів 502, 503 та завершується вивільненням вантажу з боксів 502, 503. На вказаній Фігурі показано транспортування порожньої платформи, яку було вивільнено у бокси 502, 503 (див. стрілки у вигляді ламаної лінії), які переносять з боксів 502, 503 до підйомнику 602 через "демпфер 1" 712 (завжди) та "демпфер 2" 703 (час від часу), та потім переносять до рівнів зберігання замість платформ, що містять вантаж, які прибувають звідти. Маршрути циркуляції повних та порожніх платформ перекриваються у "зоні зіткнень" (Фіг. 13(В)), у цій зоні циркуляція продовжується у різних фазах. Гнучкість системи дозволяє, що поки один з бокси розпочинає вивільнення вантажу, інші можуть знаходитись усередині виконання дії, наприклад, завантаження/розвантаження платформи, що дозволяє платформам, що несуть вантаж, досягати підйомнику без перешкод з обох боксів. Це також дозволяє порожнім платформам, що повертаються на рівень зберігання через ті ж самі підйомники, замінювати повні платформи, досягаючи місця призначення без перешкод або з меншими перешкодами. Практичним результатом цього є те, що негайно або протягом короткого періоду часу після вивільнення вантажу, порожня платформа залишає демпфер, та істотно одночасно, інша платформа, що несе вантаж, призначений для вилучення, може входити до боксу. Це може відбуватися багаторазово. 12 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 Посилання тепер зроблено на Фіг. 13, де проілюстровано рівень обслуговування у режимі узгодження, де показано порядок вивільнення вантажу відповідно до вимоги клієнта щодо вилучення та порядок приймання вантажу у будівлю для зберігання. Як буде більш детально описано нижче, відповідно до деяких втілень даного винаходу, коли вимога щодо вилучення та вимога щодо зберігання вантажу надходять одночасно, система може бути сконфігурована для узгодження затребуваного вантажу, де один із вантажів затребують для введення до будівлі, таким чином, що вантаж, який надходить, поміщають на ту ж саму платформу, яку застосовують для транспортування вантажу, що виходить з будівлі. Буде оцінено, що у деяких випадках відсутня вимога щодо вилучення вантажу та існують порожні платформи 802...809 на рівні зберігання, порожня платформа буде мати назву логічним механізмом системи, замість назви «вантаж для вивільнення». Операції, проілюстровані на Фіг. 13 є такими: (a) Платформа з вантажем прибуває за допомогою підйомнику з рівнів зберігання на рівень обслуговування. (b) Платформу з вантажем, що прибуває, переносять за допомогою "демпферу 1" у блок, прилеглий до підйомнику, та звідти надходить к блок у "демпфері 1", прилеглому до боксу, звідки його переносять у бокс. Також необхідно відмітити, що поточний напрямок вантажу приймають до уваги, таким чином, що його вилучають з боксу, а передня частина вантажу знаходиться поза будівлею. (c) Після вивільнення вантажу з боксу, нова порожня платформа отримує новий вантаж з черги. (d) Водій та пасажири виходять чи заходять через зону обслуговування боксу (у цій заявці, подвійна ширина боксу може забезпечити перевагу - шляхом забезпечення додаткового простору для зручного вибуття від вантажу, у цьому випадку система дійсно пов'язана із паркувальною будівлею), залишаючи їх вантаж (наприклад, автомобіль), або збираючи його для вилучення, та платформа з прийнятим вантажем переходить від боксу до "демпферу 1" та звідти до підйомнику 601. (е) Платформа з прийнятим вантажем переходить до підйомнику, а підйомник транспортує платформу з вантажем на рівні зберігання, наприклад, на рівень зберігання, з якого буде взятий наступний вивільнений вантаж. На рівні обслуговування платформа з вантажем, що прибув для зберігання, переключається на платформу з вантажем, затребуваним для вилучення (див. режим часу обслуговування у РСТ IL 2006/000589 "Автоматична система зберігання та пошуку"). Цикл завершується, а система повертається у вихідне положення. Відповідно до деяких втілень даного винаходу, коли система повністю функціонує та відсутні обставини, що потребують спеціального режиму функціонування (наприклад, як може бути реалізовано, коли існують два бокси та один з них функціонує неправильно). Вантаж, особливо транспортний засіб, який вилучають з будівлі, може бути вилучений таким чином, що перед транспортного засобу виходить назовні, та готовий до того, щоб клієнт легко покинув будівлю. Відповідно до деяких втілень даного винаходу, для того, щоб дозволити цю здатність системи до повертання вперед кожного предмету, який приймають у будівлю, напрям, за яким предмет повертають вперед передньою частиною, реєструють під час приймання вантажу у систему. Маршрути циркуляції повних платформ, що несуть прийнятий вантаж, з одного боку, та вантаж для вивільнення, з іншого боку, перекриваються у "Зон зіткнень", у цій зоні циркуляція проходить у різних фазах. Значення різних фаз полягає у тому, що поки один з бокси починає вивільнення вантажу, інший знаходиться усередині здійснення дії та це надає можливість платформам, що несуть вантаж для вивільнення, досягати від підйомнику без перешкод чи з меншими перешкодами обох боксів, та надає можливість платформам, платформам, що несуть прийнятий вантаж, досягати підйомнику і без перешкод чи з меншими перешкодами. Практичним результатом даного аспекту системи є те, що істотно негайно або протягом відносно короткого періоду часу після вивільнення вантажу, різні вантажі приймають на одну й ту ж платформу, та платформа істотно негайно чи протягом короткого періоду часу після цього надходить до демпферу і звідти до підйомнику. Істотно одночасно з відправленням платформ з вантажем, інша платформа з вантажем, призначеним для вивільнення, може входити до боксу. Це може відбуватися багаторазово. Це рішення забезпечено тільки шляхом прикладів та не повинно тлумачитися як таке, що обмежує обсяг даного винаходу. 13 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 14(А) являє собою графічну ілюстрацію маршрут циркуляції вантажу, що надходить (суцільні стрілки) з боксу 501 до підйомнику 601 (та звідти на рівень зберігання). Вказана Фігура також ілюструє маршрут вивільнення (пунктирні стрілки), за яким вантаж вилучають з рівня зберігання на рівень обслуговування (через підйомник 601) та звідти до боксу 501 через демпфери 701. Посилання тепер зроблено на Фігуру 14В, де проілюстровано можливість неправильного функціонування одного демпферу 711. Як можна побачити на Фігурі, система продовжує функціонувати. Іншими словами, вона має резерв та обидва маршрути (надходження вантажу та видалення вантажу) співіснують. Маршрут надходження (суцільні стрілки) від боксу 501 до підйомнику 601 (та звідти на рівень зберігання) продовжують функціонувати. Додатково, маршрут видалення (пунктирні стрілки), за яким вантаж вилучають з рівня зберігання на рівень обслуговування (через підйомник 601) та звідти до боксу 501 через демпфери 701 продовжується. Фігура 14С знов ілюструє нормальний режим системи, в якому існують два маршрути. Фігура 14D ілюструє неправильне функціонування одного боксу 511. Знову, як можна побачити на Фігурі, два маршрути співіснують навіть коли бокс не функціонує. Ці ілюстрації кожного разу показують стандартний спосіб виконання певного завдання, та альтернативний спосіб виконання такого самого завдання, у випадку неправильного функціонування боксу, підйомнику чи демпферу. Це рішення забезпечено тільки шляхом прикладів та не повинно тлумачитися як таке, що обмежує обсяг даного винаходу. Відповідно до іншого втілення даного винаходу, існує подвійний рівень обслуговування. Деякі переваги застосування подвійного рівня обслуговування ("рівень X") - конструювання "Рівня Х+Х" - включаючи два підйомники 602, 603, два бокси 502, 503, 504, 505 для кожного підйомнику та два набори блоків та "демпфер 1" 702, 712 та "демпфери 2" 703. Таке застосування є корисним для значного підвищення резервності системи. У подвійній системі, неправильне функціонування підйомнику, боксу чи демпферу не повністю відключає систему. Скоріше вона здатна продовжувати роботу із застосуванням другого підйомнику, боксу чи демпферу для обслуговування усього подвійного рівня обслуговування. Відповідно до іншого втілення даного винаходу, забезпечено модуль керування. Регулятор рівня обслуговування чи подібний може забезпечувати умови зміни статусу платформ: іі. Порожня платформа переключає статус на навантажену платформу після того, як вантаж буде прийнято на платформу. ііі. Навантажена платформа переключає статус на порожню платформу після вивільнення вантажу з платформи. iv. Навантажена платформа переключає статус на навантажений статус знову після вивільнення вантажу та приймання замість цього іншого транспортного засобу. Фіг. 15 являє собою графічну ілюстрацію застосування чотирьох режимів - приймання, вилучення, узгодження та пропускання для трьох сегментів ринку А, В та С (торгівельнокомерційний, купівлю, житловий) у різні етапи протягом дня. Перший рядок ілюструє ранковий час, другий рядок ілюструє південний час та останній рядок ілюструє вечірній час. Режим пропускання є режимом, при якому рівень зберігання є повністю чи майже повністю повним. Звідти, тепер система застосовує демпфери як тимчасові простори зберігання. Має бути підкреслено, що система залишає один підйомник, один бокс вільним. Додатково система залишає найкоротший маршрут від підйомнику до боксу вільним для пересувань вантажу. Фіг. 17 являє собою графічну ілюстрацію напрямків, за якими логічна система може переключати режими, приймаючи при цьому до уваги стан системи (рівні зберігання та рівні обслуговування) та ставить у чергу вантаж для приймання/вивільнення. Фіг. 17 ілюструє, що усі переключання є зворотними. Буде оцінено, що кожен з режимів переключають на інший режим та переключають назад та що переключення режимів може включати декілька стадій, та що можуть існувати проміжні фази між режимами. Значення кожного режиму визначає параметри функціонування, тоді як система у цьому режимі, включаючи такі параметри, як час обслуговування при вилученні та/або прийманні, пропускання та інш. Наприклад, у разі існування потреби, головним чином, приймати вантаж, застосовують режим приймання, разі існування потреби, головним чином, вивільняти вантаж, застосовують режим вилучення. У разі існування потреби щодо підтримки трафіку вантажів в обох напрямках та необхідної високої частоти за годину в обох напрямках, застосовують режим узгодження та у разі існування потреби у максимальному пропусканні будівлі та значення часу обслуговування є незначним по відношенню до пропускання, застосовують режим пропускання. Відповідно до 14 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 деяких втілень даного винаходу, різні критерії та порогові значення можуть бути розроблені для конфігурування системи та для вказання того, коли певний рівень обслуговування повинен переключатися з одного режиму на інший. Принципи, за якими кожен з режимів забезпечує певні переваги, були обговорені вище. Відповідно до іншого втілення даного винаходу, після заповнення порожніх блоків на рівні обслуговування, "демпфер 1" наповнюють та застосовують для тимчасового зберігання вантажу та після застосування "демпферу 1" для зберігання, один з двох боксів застосовують для зберігання, у ситуації, коли система має два бокси. При переключенні з режиму пропускання на будь-який інший режим, проводять зворотню послідовність. Система поступово видаляє платформи із використання, тоді як спочатку усі бокси спорожнюють, після "демпферу 1" та "демпферу 2" та після рівнів зберігання. Відповідно до деяких втілень даного винаходу, рівень послуг включає пристрої для в'їзду та виїзду паркувальної будівлі, та може бути сконфігурований для переключення між різними режимами, призначеними для забезпечення ефективного приймання вантажів, ефективного вилучення, ефективного узгодження (введення та вилучення) та/або підвищеної ємності зберігання відповідно до різних умов. Відповідно до додаткових втілень даного винаходу, рівень обслуговування може не бути частиною самої системи, а скоріше рівень обслуговування може бути частиною паркувальної будівлі або будівлі для зберігання, для управління та контролю якими призначена дана система. Відповідно до інших додаткових втілень даного винаходу, система може бути сконфігурована для управління паркувальною будівлі або будівлі для зберігання у цілому, та може містить модуль, призначений для управління одним чи більше рівнів обслуговування чи зонами обслуговування. Відповідно до деяких втілень даного винаходу рівень обслуговування може включати множину блоків зберігання. Кожен з блоків розташовано у зоні, типово прямокутної, з механічним чи роботизованим механізмом або без будь-якого механізму (Фіг. 4(А), 4(В)), та типово придатну рамку та іншу інфраструктуру, що дозволяє, разом із платформою (з механічним чи роботизованим механізмом або без будь-якого механізму, Фіг. 4(C), 4(D)) транспортування платформ з одного блоку до прилеглого блоку, щонайменше, у двох напрямках перпендикулярних один іншому у зоні рівня обслуговування (Фіг. 5). Метою режиму вилучення є вивільнення вантажів один за іншим, які надходять через підйомники на рівень обслуговування та переносять з боксу назовні. Існує опція перенесення прийнятого вантажу з підйомника до боксу через щонайменше, один демпфер, для вивільнення його назовні, та переносу порожніх платформ назад від того ж самого боксу до такого ж самого підйомнику через щонайменше, один демпфер але іншим маршрутом. Ці два маршрути не мають жодного спільного демпфера. Режим вилучення дозволяє вивільнення великого потоку вантажу за короткий період часу, наприклад, для сегментів ринку А та С (Фіг. 15). Деякі втілення даного винаходу відносяться до логічної системи контролю різних аспектів функціонування рівня обслуговування та рівнів зберігання, що дозволяє, коли рівні обслуговування знаходяться у режимі часу обслуговування, функціонувати рівню обслуговування у режимі узгодження, що дозволяє відносно короткий час обслуговування (швидке обслуговування) для одночасного узгодження (приймання та вилучення) вантажу, в обох боксах рівня обслуговування (припускаючи існування двох боксів). Буде оцінено, що вимоги щодо вилучення є випадковими та що кожен прийнятий вантаж істотно негайно надсилають до одного з рівнів зберігання для зберігання на вказаному рівні. Метою режиму узгодження є вивільнення вантажів один за іншим до боксу та через нього назовні, та на його місце для приймання у бокс нового вантажу один за іншим та переносу його до підйомнику та через нього на рівень обслуговування. Існує опція переносу прийнятого вантажу з рівня зберігання через підйомник до боксу через, щонайменше, один демпфер, та вивільнення його назовні, та переносу назад на рівень зберігання, з того ж самого боксу до того ж самого підйомнику різних вантажів, які були прийняті замість цього, через щонайменше, один демпфер але різними маршрутами. Ці два маршрути не мають жодного спільного демпфера. Режим узгодження дозволяє короткий час обслуговування одночасного приймання та вилучення вантажу, наприклад, для сегментів ринку В та С (Фіг. 16). Деякі втілення даного винаходу відносяться до логічної системи для контролю різних аспектів функціонування рівня обслуговування та рівня зберігання, що дозволяє, коли рівні зберігання знаходяться у режимі пропускання, функціонувати рівням обслуговування у режимі 15 UA 102234 C2 5 10 15 20 25 30 35 40 45 пропускання, що дозволяє підвищене використання простору зберігання, наприклад, протягом ночі, за рахунок часу обслуговування. Режим пропускання дозволяє оптимальне використання простору зберігання, наприклад, протягом ночі, і додатково, наприклад, для сегментів ринку А та С (Фіг. 15). Деякі втілення даного винаходу відносяться до логічної системи для контролю різних аспектів функціонування рівня обслуговування, та дозволяють перенос без перешкод між усіма різними режимами функціонування рівня обслуговування чи між деякими режимами (наприклад, режимом приймання, режимом вилучення, режимом узгодження, режимом пропускання та може їх підрозділяти, див. Фіг. 16). Деякі втілення даного винаходу відносяться до логічної системи для контролю різних аспектів функціонування рівня обслуговування: (a) що дозволяє чотирьом вищезазначеним режимам функціонування та їх деяким підмножинам (режим приймання, режим вилучення, режим узгодження, режим пропускання чи їх деякі підмножинам та різним переносам між ними), координувати їх функціонування з підйомниками, боксами (одним чи двома боксами) та демпферами. (b) дозволяє чотирьом вищезазначеним видам функціонування та їх різним підмножинам (режим приймання, режим вилучення, режим узгодження, режим пропускання) та різним переносам між ними, дозволяючи введення та/або вилучення платформи, що може бути частиною процесу переключення між часом обслуговування та режимом пропускання на рівнях зберігання та переключення між режимами приймання, вилучення, узгодження та пропускання на рівні обслуговування (Фіг. 18). Деякі втілення даного винаходу відносяться до логічної системи для контролю різних аспектів функціонування рівня обслуговування таким чином, що виконання процесу, визначеного вище, буде продовжуватися буде продовжуватися, навіть якщо один з компонентів рівня обслуговування [боксу \боксів, підйомнику\підйомників, демпферу\демпферів] тимчасово не застосовують. Система побудована таким чином, що кожен з режимів функціонування має альтернативний шлях для переносу платформи між кожними двома робочими точками рівню обслуговування. Відповідно до деяких втілень даного винаходу, система може бути сконфігурована таким чином, щоб реагувати на статус платформ, пов'язаних із системою, та статус платформ, що є частиною системи та/або які пов'язані із системою, може бути застосований для визначення, наприклад, бажаного режиму функціонування. Відповідно до додаткових втілень даного винаходу, система також може бути чутливою до інших параметрів, наприклад, система може бути чутливою до розмірів черги вантажів, що очікують на допуск у паркувальну будівлю та/або відповідно до іншого прикладу, система може бути чутливою до часу доби, що визначає бажаний режим функціонування системи. У наведеному далі описі, втілення даного винаходу, включаючи переважні втілення, були наведені з метою ілюстрації та опису. Вони не призначені для того, щоб бути вичерпними чи для обмеження даного винаходу точною описаною формою. Очевидні модифікації чи варіації є можливими у світі наведених вище доктрин. Втілення були вибрані та описані для забезпечення ілюстрації принципів даного винаходу та його практичного застосування, та для надання можливості фахівцю у цій галузі застосовувати даний винахід у його різних втіленнях та з різними модифікаціями, що є придатними до конкретного описаного у цій заявці застосування. Усі такі модифікації та варіації знаходяться у межах обсягу даного винаходу, як визначено формулою винаходу, що додається, при інтерпретації відповідно до обсягу, вони є належними, законними та справедливими. ФОРМУЛА ВИНАХОДУ 50 55 1. Система автоматизованого зберігання, приймання та пошуку вантажів, що містить щонайменше одну зону зберігання з одним чи більше просторами зберігання та щонайменше одну зону обслуговування, де вказана щонайменше одна зона обслуговування пристосована для приймання запасів вантажу, які вводять у вказану систему, та для пошуку запасів вантажу, які вилучають зі вказаної системи, де вказана зона обслуговування містить: a) множину платформ, пристосованих для конвеєрної доставки вказаного вантажу у межах вказаної системи, де вказані платформи мають щонайменше два етапи: завантажений стан з вантажем на них та порожній стан без вантажу на них; b) матрикс блоків, де вказані блоки мають попередньо визначену форму, на яких розташовано вказаний вантаж та вказані платформи; де вказаний матрикс блоків містить: 16 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 і) щонайменше один блок підйомників для транспортування вказаної платформи у різні зони вказаної системи; іі) щонайменше один блок боксів, що містить щонайменше один набір блоків введення/вилучення; де вказаний щонайменше один набір блоків введення/вилучення містить один чи більше прилеглих блоків, де вказаний щонайменше один набір блоків введення/вилучення забезпечено засобами, пристосованими для приймання вантажу, що надходить у вказану систему на вказані платформи, та засобами, пристосованими для вивільнення вказаного вантажу зі вказаної системи; ііі) щонайменше два блоки демпферів, де щонайменше один зі вказаних щонайменше двох блоків демпферів пристосовано для транспортування порожніх платформ та щонайменше один зі вказаних блоків демпферів пристосовано для транспортування навантажених платформ, де вказані щонайменше два блоки демпферів пристосовано для дозволу транспортування вказаних платформ у щонайменше двох ортогональних напрямках вказаної, щонайменше однієї зони обслуговування; де вказані платформи, вказаний щонайменше один блок підйомників, вказаний щонайменше один блок боксів та вказані щонайменше два блоки демпферів пристосовано для виконання вказаного зберігання, приймання та пошуку вказаного вантажу у такій послідовності, що вказаний вантаж може бути прийнятий у вказану систему, а інші вантажі можуть бути вилучені зі вказаної системи одночасно; де додатково вказаний щонайменше один зі вказаних блоків демпферів пристосовано для транспортування порожніх платформ, додатково пристосованих для зберігання порожніх платформ, та для забезпечення порожніх платформ для приймання вказаного вантажу у вказану систему. 2. Система за п. 1, де вказаний матрикс блоків додатково містить множину блоків транспортування, пристосованих для транспортування та зберігання вказаної множини платформ. 3. Система за п. 1, де вказана зона обслуговування пристосована для продовження функціонування навіть у випадку несправності менш ніж усіх вказаних блоків підйомників, менш ніж усіх вказаних блоків боксів, менш ніж усіх зі вказаних блоків демпферів чи будь-яких їх комбінацій. 4. Система за п. 1, де вказаний підйомник містить отвори для виїзду та в'їзду у більш ніж одному напрямку, щоб збільшити можливість транспортування вказаних платформ, таким чином, забезпечуючи додаткові маршрути транспортування. 5. Система за п. 1, де вказана зона обслуговування додатково містить регулятор для контролю переміщень вказаної множини платформ у межах вказаної системи; таким чином одержують незалежне пересування вказаної множини платформ. 6. Система за п. 5, де вказаний регулятор функціонує у щонайменше одному з трьох режимів у будь-який даний час, де вказані режими вибирають з групи, що складається з: a) режиму приймання, пристосованого для: (і) приймання вказаних завантажених платформ з вантажем у вказаний щонайменше один з наборів блоків введення/вилучення та переносу вказаних завантажених платформ за допомогою вказаного щонайменше одного блока підйомників у вказану зону зберігання вказаної системи за допомогою вказаної множини блоків транспортування; та (іі) переносу порожніх платформ через вказаний щонайменше один блок підйомників у вказаний щонайменше один блок введення/вилучення чи один зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків; b) режиму вилучення, пристосованого до: (і) поступового вивільнення вантажу зі вказаної зони зберігання вказаної системи за допомогою вказаної множини блоків транспортування через вказаний щонайменше один набір блоків введення/вилучення та (іі) переносу порожніх платформ назад від вказаного щонайменше одного набору блоків введення/вилучення до одного зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків; с) режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу через один зі вказаних наборів блоків введення/вилучення зі вказаної системи; та (іі) приймання нового вантажу через іншій набір блоків введення/вилучення для зберігання при застосуванні річних транспортних маршрутів для вказаного зберігання та вказаного вивільнення вказаного вантажу. 7. Система за п. 6, де регулятор пристосовано для переключення між вказаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв; де додатково вказані попередньо визначені критерії вибирають з групи, що складається з: параметрів вакантноcті блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог 17 UA 102234 C2 5 10 15 20 25 30 35 40 45 50 55 60 щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою; де додатково вказаний регулятор пристосовано для встановлення пріоритетів відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або для призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв; де вказані попередньо визначені критерії вибирають з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу щодо обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою. 8. Спосіб функціонування зони обслуговування в системі автоматизованого зберігання, приймання та пошуку вантажів, де вказана зона обслуговування пристосована для приймання вантажу, який вводять у вказану систему, та для пошуку вантажу, який вилучають зі вказаної системи, де вказаний спосіб включає стадію: а) забезпечення вказаної системи автоматизованого зберігання, приймання та пошуку, що містить щонайменше одну зону зберігання з однім чи більше просторами зберігання, та щонайменше одну зону обслуговування; де вказана щонайменше одна зона обслуговування пристосована для приймання запасів вантажу, що вводять у вказану систему, та для пошуку запасів вантажу, які вилучають зі вказаної системи; де вказана зона обслуговування містить: (і) множину платформ для конвеєрної доставки вказаного вантажу у межах вказаної системи: де вказані платформи відрізняються щонайменше двома станами: завантаженим станом з вантажем на них та порожнім станом без вантажу на них; (іі) матрикс блоків, де вказані блоки мають попередньо визначену форму, на яких розташовано вказаний вантаж та вказані платформи; де вказаний матрикс блоків містить: (1) щонайменше один блок підйомників для транспортування вказаної платформи у різні зони вказаної системи; (2) щонайменше один блок боксів, що містить щонайменше один набір блоків введення/вилучення; де вказаний один набір блоків введення/вилучення містить один чи більше прилеглих блоків, де вказаний щонайменше один набір блоків введення/вилучення забезпечено засобами, пристосованими для приймання вантажу, що надходить у вказану систему на вказані платформи, та засобами, пристосованими для вивільнення вказаною вантажу зі вказаної системи; (3) щонайменше два блоки демпферів, де щонайменше один зі вказаних щонайменше двох блоків демпферів пристосовано для транспортування порожніх платформ, та щонайменше один зі вказаних блоків демпферів пристосовано для транспортування завантажених платформ, де вказані щонайменше два блоки демпферів пристосовано таким чином, щоб дозволити транспортування вказаних платформ у щонайменше двох ортогональних напрямках вказаної щонайменше однієї зони обслуговування; b) приймання вантажу, що надходить, у вказаний щонайменше один набір блоків введення/вилучення шляхом завантаження вказаного вантажу на вказану множину платформ; с) транспортування вказаної множини платформ через вказаний щонайменше один блок підйомників у вказану зону зберігання за попередньо визначеним маршрутом А; d) зберігання вказаного вантажу у вказаній зоні зберігання; е) транспортування вказаного вантажу на вказану множину платформ через вказаний щонайменше, один блок підйомників зі вказаної зони зберігання до набору блоків введення/вилучення у вказану зону обслуговування за попередньо визначеним маршрутом В, де вказаний маршрут А істотно відрізняється від маршруту В, який застосовують на вказаній стадії (с); f) вивільнення вказаного вантажу зі вказаного набору блоків введення/вилучення вказаної системи зберігання, приймання та пошуку вантажу: де вказані стадії транспортування, вивільнення та приймання здійснюють у такій послідовності, що запас вказаного вантажу може бути прийнятий у вказану систему, та запас вантажів може бути вилучений зі вказаної системи одночасно; де додатково вказану стадію (с) здійснюють за маршрутом, що є істотно відмінним під маршруту, який застосовують на вказаній стадії (g). 9. Спосіб за п. 9, що додатково включає стадію забезпечення вказаного матриксу блоків з множиною блоків транспортування для транспортування вказаного вантажу на вказаних блоках транспортування. 18 UA 102234 C2 5 10 15 20 25 30 35 40 10. Спосіб за п. 8, що додатково включає стадію забезпечення вказаного підйомника з отворами виїзду та в'їзду у більш ніж одному напрямку для збільшення можливостей транспортування вказаних платформ, де таким чином вказану множину платформ транспортують із застосуванням додаткових маршрутів. 11. Спосіб за п. 8, що додатково включає стадію незалежного пересування вказаної множини платформ у межах вказаної системи. 12. Спосіб за п. 8, що додатково включає стадію функціонування вказаної зони обслуговування за допомогою вказаного регулятора у режимах, вибраних з групи, що складається з: a) режиму приймання, пристосованого для: (і) приймання вказаних завантажених платформ з вантажем у вказаний щонайменше один набір блоків введення/вилучення та переносу вказаних завантажених платформ за допомогою щонайменше одного підйомника у вказану зону зберігання вказаної системи за допомогою вказаної множини блоків транспортування; та (іі) переносу порожніх блоків за допомогою вказаного щонайменше одного блока підйомників до вказаного щонайменше одного блока введення/вилучення чи до одного зі вказаних щонайменше двох демпферних блоків за допомогою істотно різних блоків; b) режиму вилучення, пристосованого для: (і) поступового вивільнення вантажу зі вказаної зони зберігання вказаної системи за допомогою вказаної множини блоків транспортування через вказаний щонайменше один набір блоків введення/вилучення та (іі) переносу порожніх платформ назад від вказаного щонайменше одного набору блоків введення/вилучення до одного зі вказаних щонайменше двох блоків демпферів за допомогою істотно різних блоків; та с) режиму узгодження, пристосованого для одночасного (і) вивільнення вказаного вантажу через один зі вказаних наборів блоків введення/вилучення зі вказаної системи; та (іі) приймання нового вантажу через інший набір блоків введення/вилучення для зберігання при застосуванні різних маршрутів транспортування для вказаного зберігання та вказаного вивільнення вказаного вантажу. 13. Спосіб за п. 8, що додатково містить щонайменше одну стадію, вибрану з (a) переключення між вказаним режимом приймання, вказаним режимом вилучення та вказаним режимом узгодження відповідно до попередньо визначених критеріїв; (b) вибору вказаних попередньо визначених критеріїв з групи, що складається з параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системи; (с) визначення пріоритету відкладених вимог щодо вилучення для вилучення вказаного вантажу з простору зберігання та/або призначення відкладених вимог щодо введення у простір зберігання відповідно до попередньо визначених критеріїв; чи (d) вибору вказаних попередньо визначених критеріїв з групи, що складається з: параметрів вакантності блока(блоків), наявності чи відсутності відкладених вимог щодо вилучення, кількості відкладених вимог щодо вилучення, середнього часу очікування вимог щодо вилучення, наявності чи відсутності відкладених вимог щодо введення, кількості відкладених вимог щодо введення, середнього часу очікування вимог щодо введення, поточного статусу зони зберігання, поточного статусу зони обслуговування, часу відклику вказаного підйомника, попередньої історії користування системою. 19 UA 102234 C2 20 UA 102234 C2 21 UA 102234 C2 22 UA 102234 C2 23 UA 102234 C2 24 UA 102234 C2 25 UA 102234 C2 26 UA 102234 C2 27 UA 102234 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and system of enabling automated receiving and retrieving of stocks of cargo for storing purposes
Автори англійськоюKharkover, Ilia
Назва патенту російськоюСпособ и система, позволяющие автоматизированный прием и поиск грузов с целью хранения
Автори російськоюХарковер Илиа
МПК / Мітки
МПК: B65G 1/00, E04H 6/18, E04H 6/06
Мітки: вантажів, зберігання, пошук, приймання, система, метою, дозволяють, автоматичне, спосіб
Код посилання
<a href="https://ua.patents.su/40-102234-sposib-ta-sistema-shho-dozvolyayut-avtomatichne-prijjmannya-ta-poshuk-vantazhiv-z-metoyu-zberigannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб та система, що дозволяють автоматичне приймання та пошук вантажів з метою зберігання</a>
Система приймання, зберігання та відпуску нафти і нафтопродуктів
Номер патенту: 58830
Опубліковано: 26.04.2011
Автори: Овсієвський Анатолій Олексійович, Греков Володимир Пилипович, П'янков Анатолій Андрійович, Кузнєцов Олександр Валерійович
МПК: B65D 88/18, B65D 90/32, B65D 90/30
Мітки: система, приймання, нафтопродуктів, нафти, зберігання, відпуску
Формула / Реферат:
1. Система приймання, зберігання та відпуску нафти і нафтопродуктів, яка містить резервуари для зберігання нафти і нафтопродуктів, кожен з яких сполучений газовирівнювальним трубопроводом через вогняні запобіжники і запірну арматуру із щонайменше одним газозбірником, систему раннього виявлення аварійних ситуацій із набором датчиків, встановлених в кожному резервуарі для зберігання нафти і нафтопродуктів та біля кожного з них, блоком...
Пересувна установка для приймання, охолодження, зберігання і транспортування молока
Номер патенту: 24719
Опубліковано: 10.07.2007
Автор: Остапович Василь Васильович
МПК: A01J 9/00
Мітки: охолодження, приймання, пересувна, транспортування, молока, зберігання, установка
Формула / Реферат:
Пересувна установка для приймання, охолодження, зберігання і транспортування молока, що містить герметичний резервуар-охолоджувач молока з мішалкою і фільтром, насос, систему трубопроводів, пристосування для заливання молока і бачок з пристроєм для електропідігрівання води, яка відрізняється тим, що установка скомпонована на шасі пасажирсько-вантажного варіанта автомобіля, герметичний резервуар-охолоджувач молока додатково оснащений...
Спосіб виробництва гідратів попутного нафтового газу з метою їх транспортування і зберігання
Номер патенту: 101882
Опубліковано: 13.05.2013
Автори: Педченко Михайло Михайлович, Педченко Лариса Олексіївна
Мітки: спосіб, газу, зберігання, транспортування, гідратів, попутного, нафтового, метою, виробництва
Формула / Реферат:
1. Спосіб виробництва газових гідратів, який включає підготовку газу і води, утворення газогідрату, сепарацію (відділення від газогідрату газу й води, що не увійшли до його складу), охолодження і/чи заморожування газогідрату, агломерацію (формування, спресовування і гранулювання) гідратних частинок, охолодження і/чи заморожування утворених гранул, їх консервацію шляхом утворення на поверхні льодяної кірки й заморожування потоком охолодженого...
Спосіб виробництва гідратів попутного нафтового газу з метою їх транспортування і зберігання
Номер патенту: 68780
Опубліковано: 10.04.2012
Автори: Педченко Михайло Михайлович, Педченко Лариса Олексіївна
МПК: F17C 11/00, F25J 1/00, C07C 9/00, C10L 3/10
Мітки: спосіб, нафтового, гідратів, транспортування, виробництва, попутного, метою, газу, зберігання
Формула / Реферат:
1. Спосіб виробництва газових гідратів, який уключає підготовку газу і води, утворення газогідрату, сепарацію (відділення від газогідрату газу й води, що не увійшли до його складу), охолодження і/чи заморожування газогідрату, агломерацію (формування, спресовування і гранулювання) гідратних частинок, охолодження і/чи заморожування утворених гранул, їх консервацію шляхом утворення на поверхні льодяної кірки й заморожування потоком охолодженого...
Контейнер для транспортування й зберігання штучних вантажів

Номер патенту: 65065
Опубліковано: 15.03.2004
Автори: Левін Борис Аронович, Закрочимський Валерій Раймундович, Кузнецов Володимир Олександрович, Луцкер Олександр Олександрович
МПК: B65D 30/00
Мітки: контейнер, транспортування, вантажів, зберігання, штучних
Формула / Реферат:
1. Контейнер для транспортування й зберігання штучних вантажів, утворений зшитими між собою стінками і дном з гнучкого пакувального матеріалу і оснащений вантажопідйомними стропами, який відрізняється тим, що на зовнішній поверхні дна контейнера передбачені як мінімум два наскрізних рукава, в яких проходять вантажопідйомні стропи.2. Контейнер за п. 1, який відрізняється тим, що наскрізні рукава розташовані на дні контейнера у...
Попередній патент: Поліморфна форма ротиготину та її застосування
Наступний патент: Розчинний напій
Випадковий патент: Регулятор вакууму доїльного агрегата