Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при роботі кранового візка з непередбачуваними зовнішніми впливами
Номер патенту: 102280
Опубліковано: 25.06.2013
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
Формула / Реферат
Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при якому виконують керування рухом кранового візка з вантажем на гнучкому підвісі, що включає вимірювання довжини гнучкого підвісу та маси вантажу, який відрізняється тим, що при гальмуванні кранового візка величину приводного зусилля, яка на нього діє, встановлюють через визначений проміжок часу з урахуванням першої, другої та третьої похідної за часом положення центру мас вантажу, довжини гнучкого підвісу, маси вантажу і зведеної до поступального руху маси візка та привідного механізму, причому величина приводного зусилля не перевищує наперед встановлене значення.
Текст
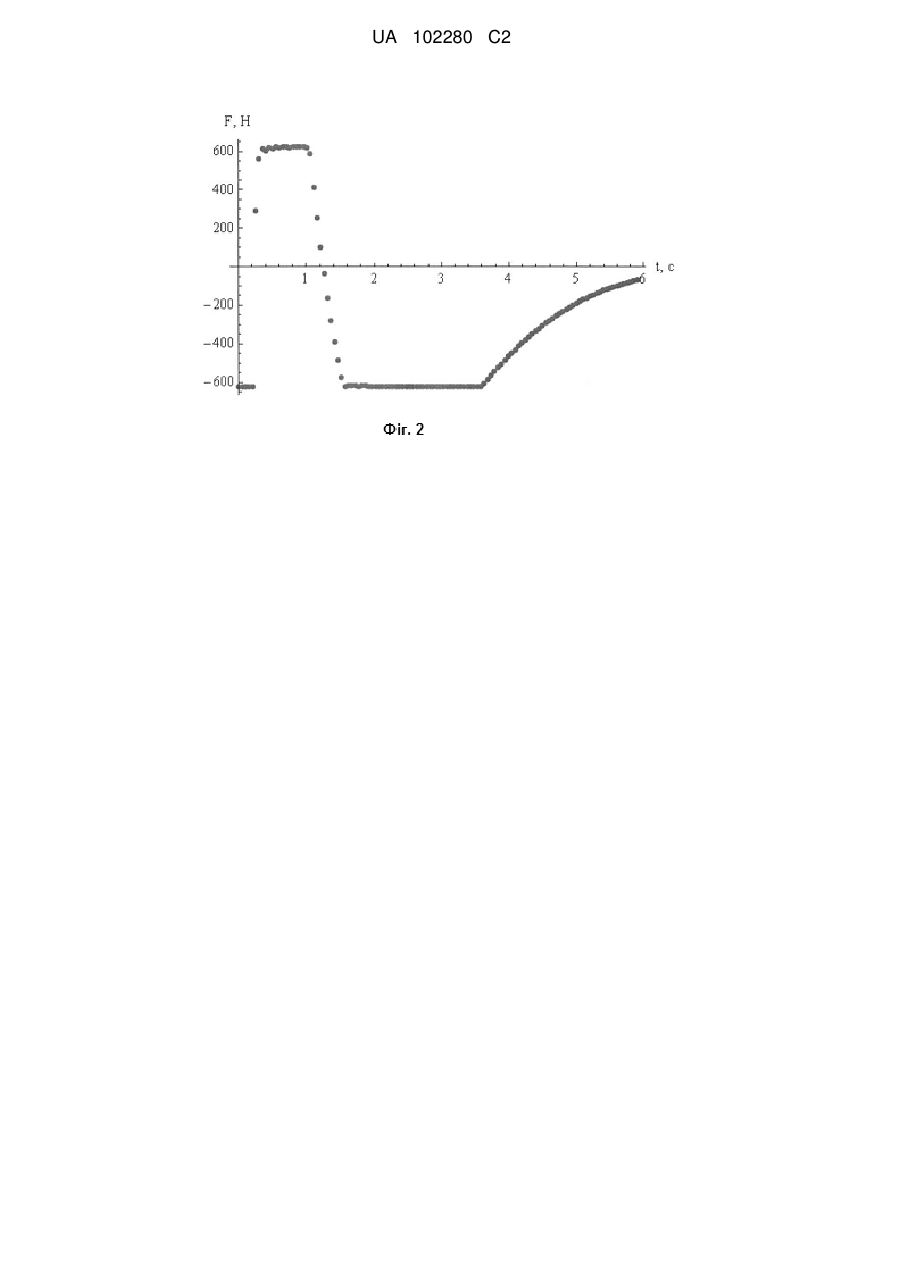
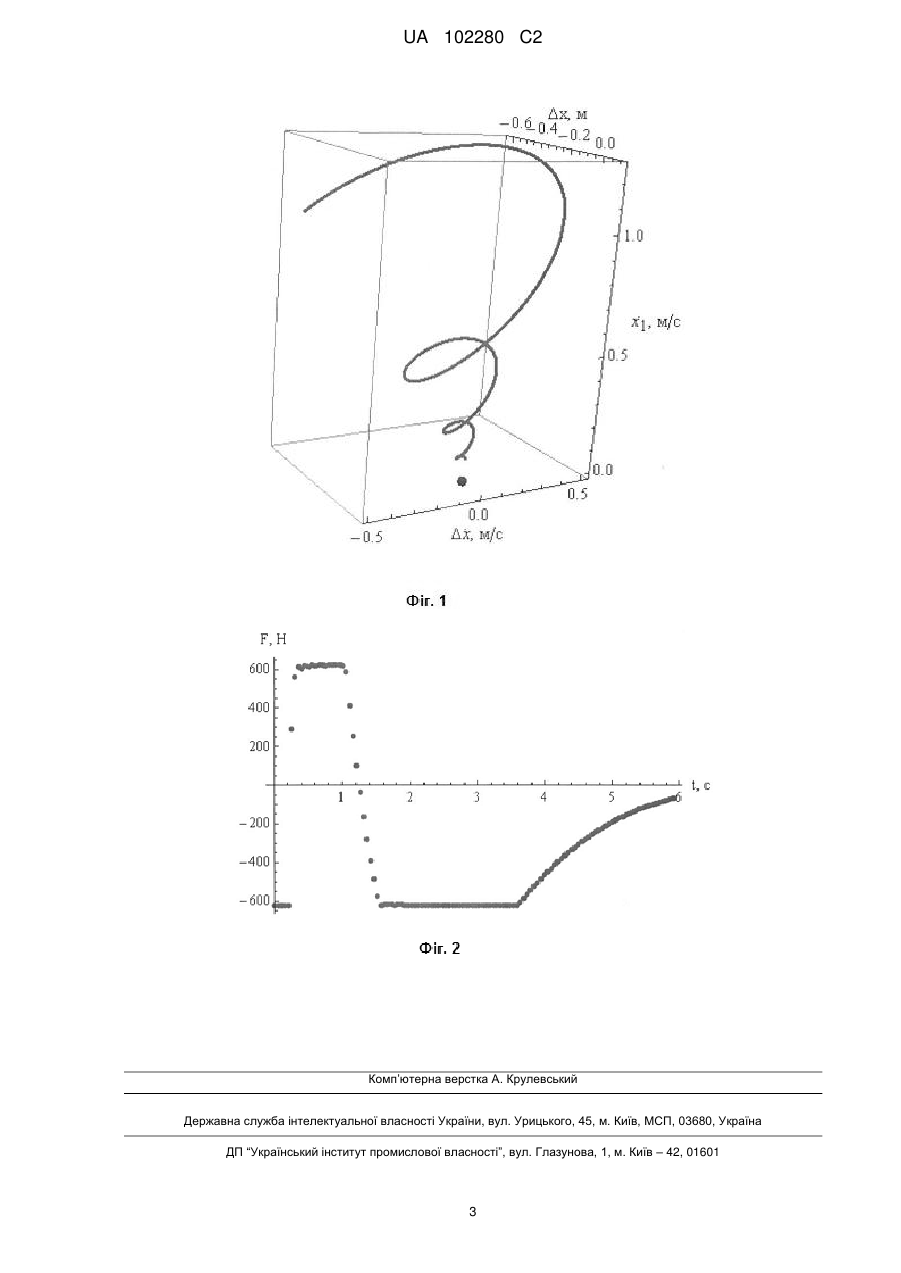
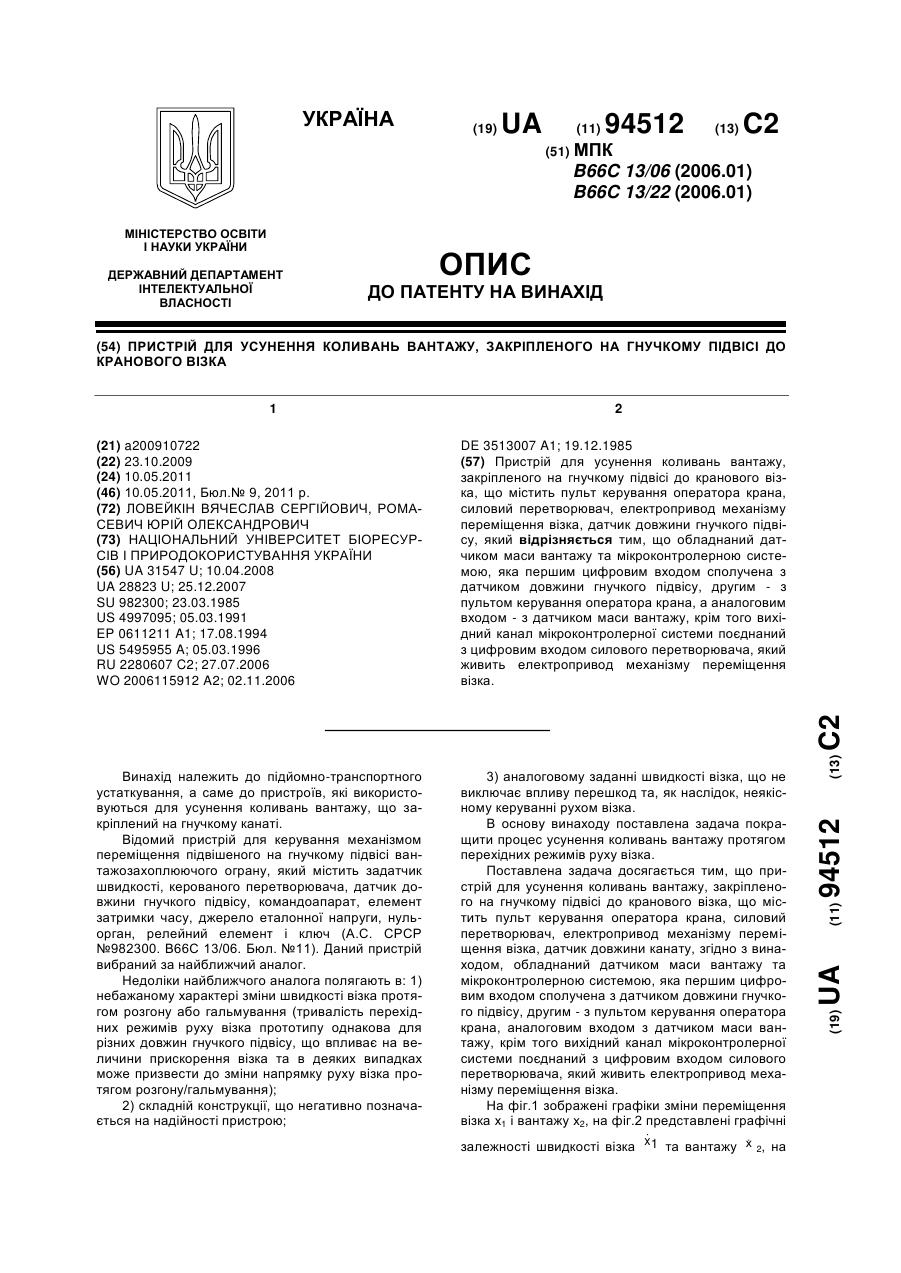
Реферат: Винахід належить до способів керування рухом кранового візка при роботі крана із впливами, які наперед не можуть бути передбачені. Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при якому при гальмуванні кранового візка величину приводного зусилля, яка на нього діє, встановлюють через визначений проміжок часу з урахуванням першої, другої та третьої похідної за часом положення центру мас вантажу, довжини гнучкого підвісу, маси вантажу і зведеної до поступального руху маси візка та привідного механізму, причому величина приводного зусилля не перевищує наперед встановлене значення. Винахід забезпечує здійснення керування рухом візка при значних вітрових впливах. UA 102280 C2 (12) UA 102280 C2 UA 102280 C2 5 10 15 20 25 30 35 40 45 Винахід належить до вантажопідйомної техніки, зокрема до способів керування рухом кранового візка при роботі крана із впливами, які наперед не можуть бути передбачені (наприклад, при вітрових навантаженнях, які спричиняють розгойдування вантажу). Відомий спосіб (Смехов А. А. Оптимальное управление подъемно-транспортными машинами / А. А. Смехов, Н. И. Єрофєев. - М.: Машиностроение, 1975. - 239 с.) усунення коливань вантажу за мінімальний час, який ґрунтується на програмному керуванні рухом кранового візка. Недоліком такого способу є підвищені динамічні навантаження у приводі вантажного візка внаслідок того, що функція моменту на валу двигуна візка має розриви першого роду. Відомий також спосіб (патент № 92617 на корисну модель, опубл. 25.11.2010, бюл. № 22, МПК В66С 13/00, 13/22, Спосіб керування вантажним візком з вантажем на гнучкому підвісі, автори: Ловейкін B.C., Ромасевич Ю.О.) усунення коливань вантажу, який закріплений на гнучкому підвісі, згідно з яким здійснюється вимірювання довжини підвісу вантажозахватного пристрою, маси вантажу, а розгін вантажного візка виконується на штучній механічній характеристиці приводного електродвигуна для створення на його валу відповідного приводного моменту, причому протягом розгону візка прискорення не перевищує максимально допустимого значення. Керування рухом кранового візка за даним способом є програмним. Крім того, даний спосіб характеризується плавністю руху кранового візка і невеликими динамічними навантаженнями у його приводі. Даний спосіб вибрано за прототип. Недоліком прототипу є те, що він не може бути використаний у тих випадках, коли на кран діють невизначені зовнішні впливи. Прикладами таких впливів можуть бути: пориви вітру при виконанні перевантажувальних робіт у портах; нерівності шляху по якому рухається візок, що впливає на виникнення коливань вантажу тощо. Програмне керування рухом візка не враховує фактичне фазове положення вантажу відносно кранового візка і, як наслідок, коливання вантажу залишаються. Винаходом ставиться задача при керуванні рухом кранового візка врахувати непередбачувані зовнішні впливи на кран та вантаж, що викликають додаткові коливання вантажу закріпленого на гнучкому підвісі. Поставлена винаходом задача вирішується тим, що крановий візок протягом гальмування рухається під дією зусилля, яке є функцією трьох змінних: першої, другої та третьої похідних за часом положення центру мас вантажу. В результаті чого усуваються коливання вантажу. На фіг. 1 зображено графік фазової траєкторії руху системи „візок - вантаж" (графік побудований у системі координат „різниця центів мас візка і вантажу - різниця швидкостей центів мас візка і вантажу - швидкість візка"; точкою на фіг. позначено початок координат). З фіг. 1 видно, що коливання вантажу з плином часу усуваються, а швидкість візка зменшується практично до нуля. На фіг. 2. показано графік зміни зусилля, що діє на візок протягом усієї тривалості гальмування. При цьому модуль приводного зусилля не перевищує встановленої величини, що забезпечує роботу приводного двигуна візка без перевантажень. На фіг. 3. показано загальний алгоритм роботи системи керування роботою кранового візка з вантажем. Відповідно до алгоритму реалізації способу (фіг. 3) виконується введення початкових даних для розрахунку функції приводного зусилля до яких належать такі величини: маса вантажу, довжина гнучкого підвісу, перша, друга та третя похідні за часом координати центра мас вантажу. Надалі визначається значення приводного зусилля приводу кранового візка за формулою: m A x A 2 2 2A 3x 2 x F 1 1 2 W , (1) 2 2u 0 g , де - довжина гнучкого підвісу, g l l - деякі коефіцієнти, що залежать від довжини де 0 - власна частота коливань вантажу ( 0 50 прискорення вільного падіння); A 1 , A 2 , A 3 гнучкого підвісу l та маси вантажу m2 ; m1 - зведена до поступального руху маса візка та приводного механізму; W - статичний опір переміщенню візка з вантажем; u - ваговий коефіцієнт, який підлягає варіюванню, причому початкове значення u є мінімальним, у подальшому u збільшується. Отримане значення порівнюють з допустимим Fmax . Якщо виконується умова F Fmax , то система керування видає значення F на пристрій керування приводним двигуном візка. Якщо ж ця умова не виконується, то збільшують значення u на 1 UA 102280 C2 5 величину і повторюють розрахунок F з перевіркою умови F Fmax . Система керування варіює значення u доти, поки ця умова не виконається. Надалі, після видачі сигналу на пристрій керування приводом візка, система керування зчитує фазові координати вантажу x 2 , 2 , x2 за допомогою датчика відхилення канату з x вантажем від вертикалі. Вищі похідні функції х2 отримують за допомогою кінцево-різницевих співвідношень, наприклад для x 2 : x 2 i 1t x 2 it , (2) t де t - тривалість руху системи між „сусідніми" опитуваннями датчика відхилення канату з вантажем від вертикалі; і - індекс і-того опитування датчика. На основі введених у систему керування даних x 2 , 2 , x2 виконується перевірка умови: x x2 10 x i 1t 2 i 1t x 2 i 1t 2 x x max , (3) x 2 i 1t 2 2 2 2 4 де x max - максимально дозволене, за технологічними вимогами, відхилення вантажу від 2 gm1 m 2 , де lm1 m2 - маса вантажу). За виконаної умови необхідно закінчувати процес гальмування, тобто припиняти подальший розрахунок і видачу сигналів на пристрій керування приводом кранового візка. Якщо умова не виконалась, то необхідно надалі продовжувати керування рухом візка, повертаючись до визначення величини приводного зусилля. Фізична суть умови (3) полягає у тому, що енергія коливань вантажу, яка допустима за технологічними вимогами, повинна бути більшою, аніж поточна енергія руху динамічної системи „візок-вантаж", яка є сумою енергії коливань вантажу та енергії руху кранового візка. Таким чином, визначення величини приводного зусилля протягом гальмування кранового візка відбувається дискретно, тобто через проміжок часу t . Пропонований спосіб може бути використаний для керування рухом вантажопідйомного крана. Особливо цінним даний спосіб може виявитись у роботі портових перевантажувачів мостового типу, оскільки вони зазнають значних вітрових впливів. вертикалі; - власна частота коливань вантажу відносно рухомого візка ( 15 20 25 ФОРМУЛА ВИНАХОДУ 30 35 Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при якому виконують керування рухом кранового візка з вантажем на гнучкому підвісі, що включає вимірювання довжини гнучкого підвісу та маси вантажу, який відрізняється тим, що при гальмуванні кранового візка величину приводного зусилля, яка на нього діє, встановлюють через визначений проміжок часу з урахуванням першої, другої та третьої похідної за часом положення центру мас вантажу, довжини гнучкого підвісу, маси вантажу і зведеної до поступального руху маси візка та привідного механізму, причому величина приводного зусилля не перевищує наперед встановлене значення. 2 UA 102280 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for removal of oscillation of load attached on flexible suspension during crane truck operation at unpredicted impacts
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ устранения колебаний груза, закрепленного на гибком подвесе, при работе крановой тележки с непредвиденными внешними воздействиями
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/20, B66C 13/06
Мітки: непередбачуваними, підвісі, зовнішніми, візка, коливань, вантажу, усунення, впливами, гнучкому, спосіб, закріпленого, кранового, роботи
Код посилання
<a href="https://ua.patents.su/5-102280-sposib-usunennya-kolivan-vantazhu-zakriplenogo-na-gnuchkomu-pidvisi-pri-roboti-kranovogo-vizka-z-neperedbachuvanimi-zovnishnimi-vplivami.html" target="_blank" rel="follow" title="База патентів України">Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при роботі кранового візка з непередбачуваними зовнішніми впливами</a>
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка
Номер патенту: 94512
Опубліковано: 10.05.2011
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06, B66C 13/22
Мітки: підвісі, усунення, пристрій, гнучкому, кранового, коливань, візка, вантажу, закріпленого
Формула / Реферат:
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини гнучкого підвісу, який відрізняється тим, що обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана,...
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 94511
Опубліковано: 10.05.2011
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/06, B66C 13/22
Мітки: коливань, закріпленого, підвісі, гнучкому, вантажу, зменшення, спосіб
Формула / Реферат:
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом:,де - прискорення вільного...
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: керування, приводом, пристрій, візка, вантажем, підвісі, гнучкому
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/04
Мітки: крановим, гнучкому, візком, вантажем, підвісі, спосіб, керування
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/00
Мітки: керування, вантажним, гнучкому, вантажем, візком, спосіб, підвісі
Формула / Реферат:
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при...
Попередній патент: Маска захисна
Наступний патент: Пристрій для доставки порошку
Випадковий патент: Курильний виріб з контрольованим ароматовивільненням