Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович

Формула / Реферат
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при якому прискорення візка не перевищує допустимого значення, а розгін здійснюють на штучній механічній характеристиці приводного електродвигуна для створення на його валу відповідного приводного моменту Мдв, де
![]()
де авіз- прискорення візка під час пуску, м/с2;
аван- прискорення вантажу під час пуску, м/с2;
mвіз - маса вантажного візка, кг;
mван - маса вантажу, кг;
d - діаметр колеса візка, м;
![]() - ККД редуктора привода візка;
- ККД редуктора привода візка;
u - передаточне число редуктора привода візка;
F0 - опір переміщенню візка, Н.
Текст
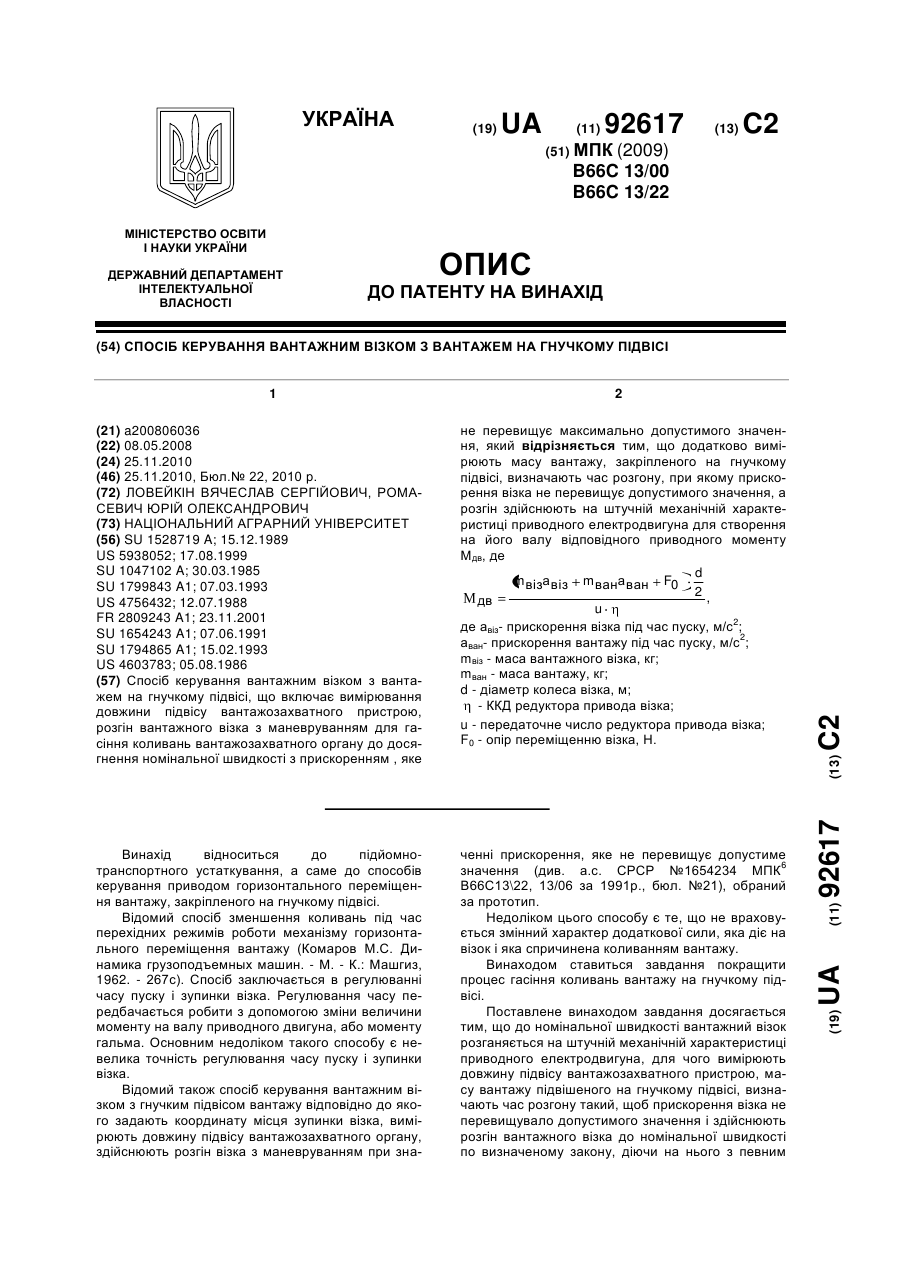
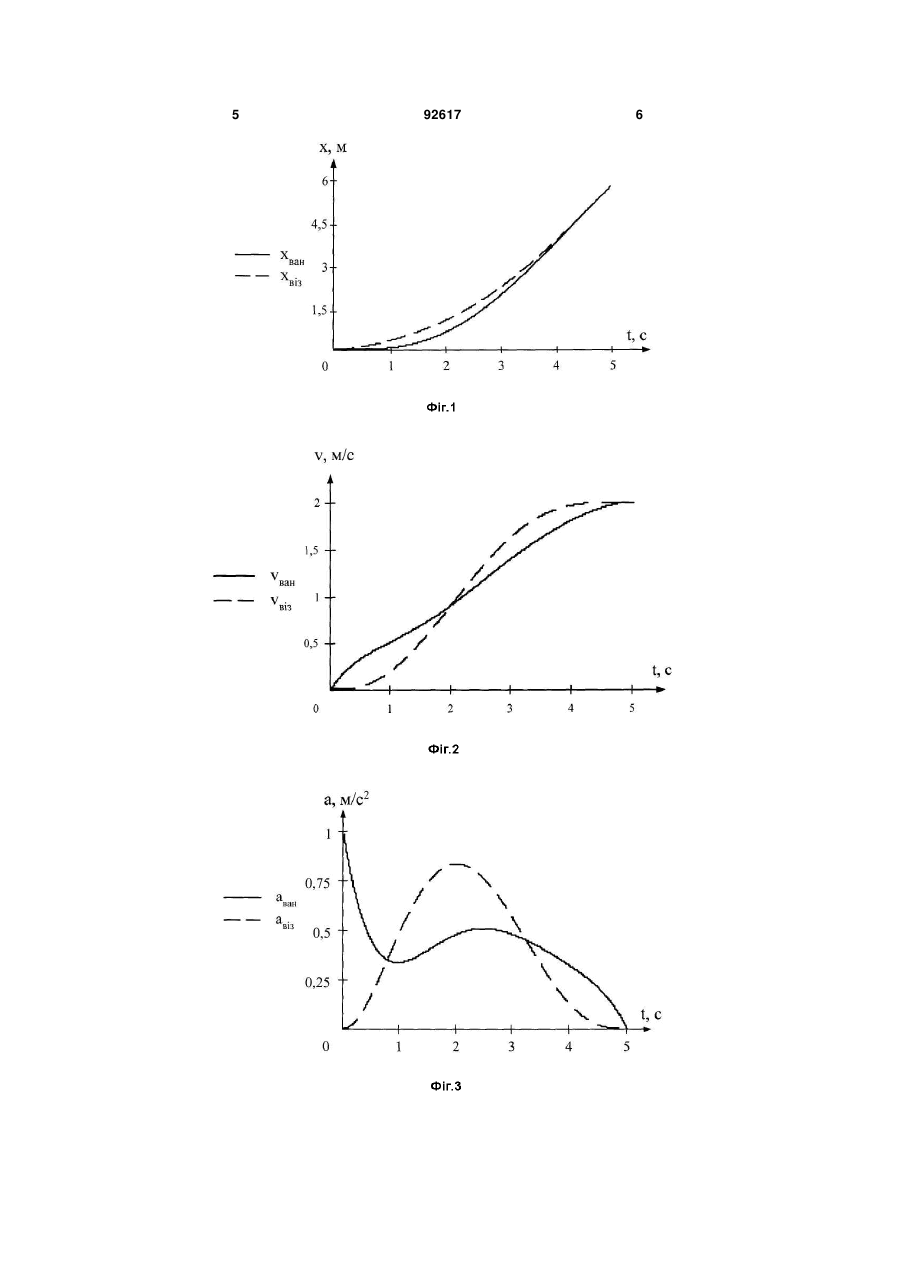
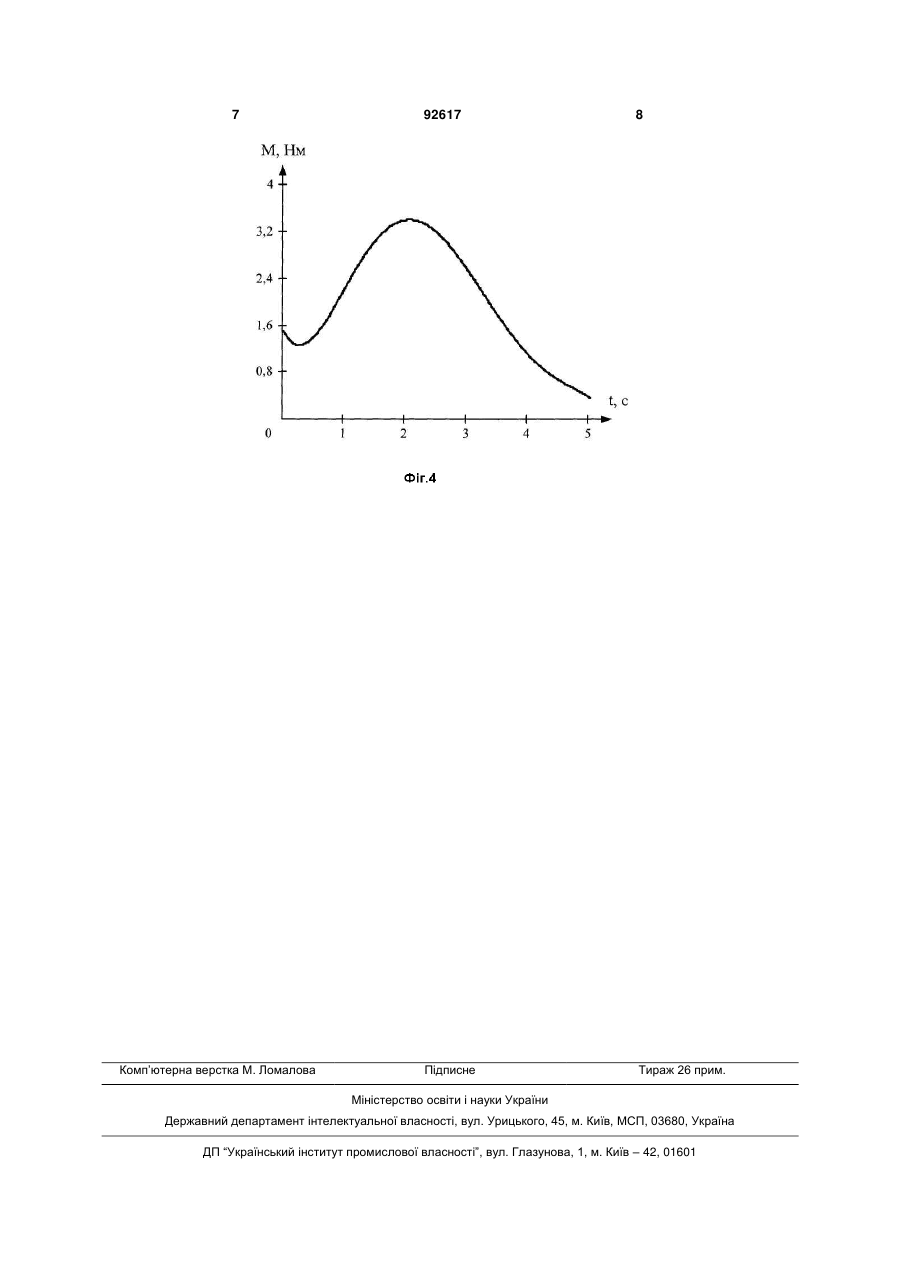
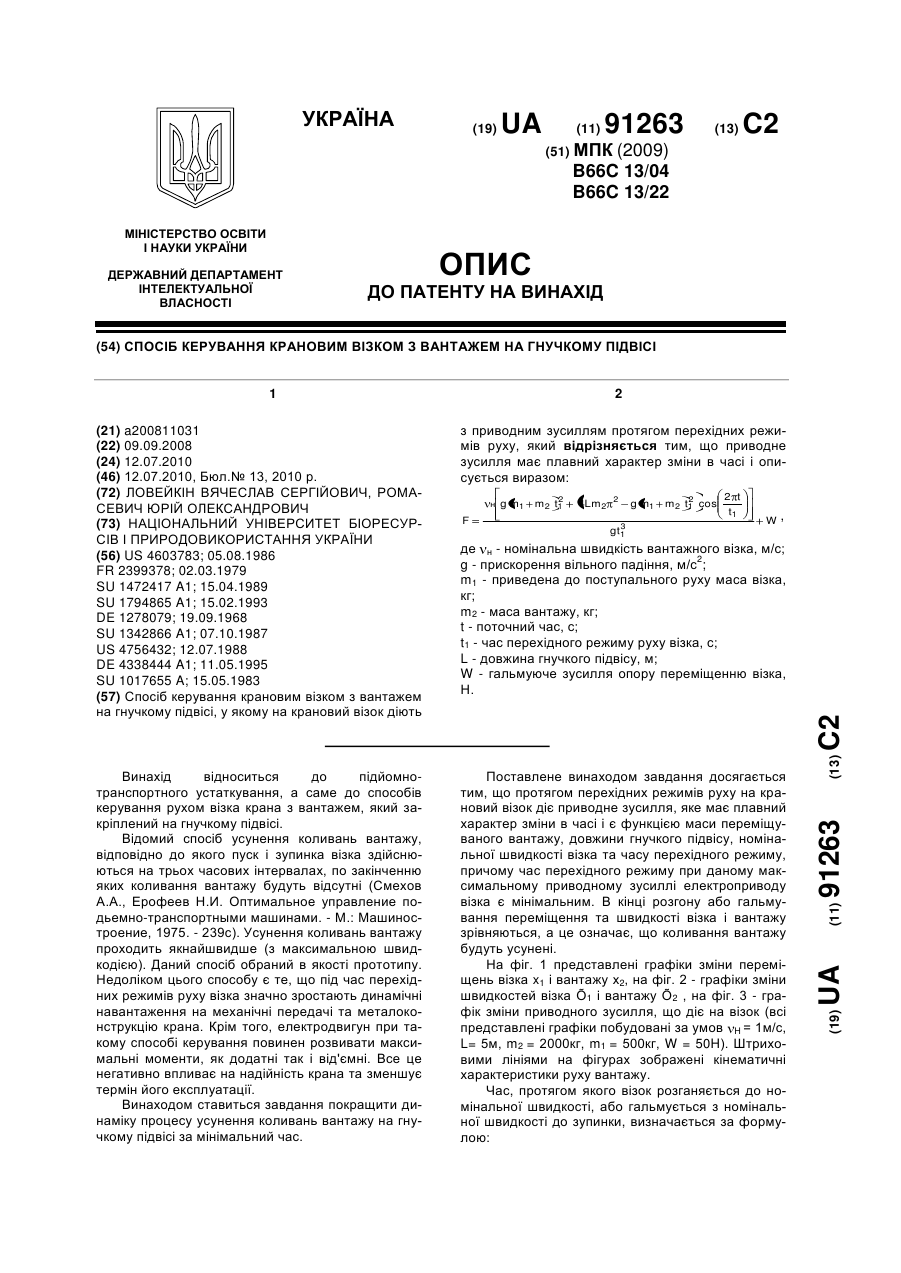
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке C2 2 (19) 1 3 зусиллям, тобто створюючи потрібний момент на валу двигуна. В результаті переміщення, швидкості, прискорення і сили, що діють на візок і вантаж, будуть однакові. На Фіг.1 представлені графіки зміни переміщень візка xвіз і вантажу хван, на Фіг.2 - графіки зміни швидкостей візка vвіз і вантажу vван, на Фіг.3 графіки зміни прискорень візка авіз і вантажу аван, на Фіг.4 - графік моменту на валу електродвигуна вантажного візка (всі представлені графіки побудовані за умов vh=2m/c, 1=5m). Максимальне прискорення візка під час пуску, або гальмування не повинно перевищувати максимально допустимого значення: (1) амах амах. доп., де амах - максимальне значення прискорення вантажного візка, м/с2; vвіз 1 92617 4 амах.доп.. - максимальне допустиме значення прискорення, більше якого приводні колеса вантажного візка ковзають (буксують) по балці, м/с2 (див. кн. Александров М.П. Подъемнотранспортные машины. - М.: Высшая школа, 1985. - 520с.). Визначивши максимальне значення прискорення знаходять час розгону візка за формулою: t1 м/с; aвіз 1 (2) t1 - час розгону візка, с; g - прискорення вільного падіння, м/с2; 1 - довжина гнучкого підвісу, м. Зміну швидкості вантажного візка під час розгону можна описати за формулою: (3) - ККД редуктора привода візка; u - передаточне число редуктора; Fо - опір переміщенню візка, Н. Прискорення вантажу під час розгону візка змінюється за такою залежністю: аван=-60 t 6 t6vH + 180 t 5 t5vH-180 t 4 t4vH+ 1 1 1 (5) 3 t3 v . +60 t H 1 Формула для прискорення вантажного візка під час розгону вантажного 60t 6t 6vн 180t 5t5vн 180t 4t 4vн 60t 3t3vн 1 1 1 1 6t3v 5 t 2v 4tv 3 1200t н 2160t1 н 1080t1 н 120t1 tv н 1 , g Таким чином, для усунення коливань вантажу необхідно керувати швидкістю обертання вала приводного електродвигуна (швидкістю візка), а також моментом на валу електродвигуна, тобто 120v н 1 , амах g де vH - номінальна швидкість вантажного візка, 10t 6t 6vн 36t 5t5vн 45t 4t 4vн 40t 3t3vн 1 1 1 1 6t 4v 5t3v 4t 2v 120t 3tv 300t н 720t1 н 540t1 н н 1 1 , g де t - поточний час, с. Приведений до валу двигуна момент при розгоні візка визначається за формулою: d mвізавіз mванаван Fо (4) 2, дв u де авіз- прискорення візка під час пуску, м/с2; аван- прискорення вантажу під час пуску, м/с2; mвіз - маса вантажного візка, кг; mван - маса вантажу, кг; d - діаметр колеса візка, м; 3 (6) формувати штучну механічну характеристику приводного двигуна. Формувати потрібну механічну характеристику двигуна візка можливо з допомогою частотного перетворювача. 5 92617 6 7 Комп’ютерна верстка М. Ломалова 92617 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of cargo truck with load on flexible suspension
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ управления грузовой тележкой с грузом на гибком подвесе
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/00, B66C 13/22
Мітки: вантажем, вантажним, візком, спосіб, підвісі, керування, гнучкому
Код посилання
<a href="https://ua.patents.su/4-92617-sposib-keruvannya-vantazhnim-vizkom-z-vantazhem-na-gnuchkomu-pidvisi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування вантажним візком з вантажем на гнучкому підвісі</a>
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/04
Мітки: візком, спосіб, крановим, керування, гнучкому, підвісі, вантажем
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: вантажем, підвісі, пристрій, приводом, керування, гнучкому, візка
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Спосіб керування механізмом переміщення кранового візка
Номер патенту: 87236
Опубліковано: 25.06.2009
Автори: Ловейкін Андрій В'ячеславович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/04
Мітки: спосіб, керування, кранового, механізмом, переміщення, візка
Формула / Реферат:
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/04
Мітки: пристрій, візка, обмеження, вантажу, крана, розгойдувань, підвішеного
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій керування візком фронтальної дощувальної машини
Номер патенту: 44684
Опубліковано: 15.03.2002
Автор: Мельников Володимир Гаврилович
МПК: A01G 25/16
Мітки: візком, керування, машини, дощувальної, фронтально, пристрій
Формула / Реферат:
1. Устройство управления тележкой фронтальной дождевальной машины, содержащее систему механических звеньев, блок коммутации электродвигателя, блок защиты электродвигателя и преобразовательно – командное звено, связанное одним входом с выходом системы механических звеньев и другим входом - с переключателем направления движения дождевальной машины, а выходом - с входом блока коммутации электродвигателя, отличающееся тем, что преобразовательно...
Попередній патент: Спосіб видалення закису азоту з відхідного газу
Наступний патент: Дозатор
Випадковий патент: Спосіб контролю процесу магнітної очистки від феромагнітних домішок сипучих, рідких і газових середовищ