Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка
Номер патенту: 94512
Опубліковано: 10.05.2011
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович

Формула / Реферат
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини гнучкого підвісу, який відрізняється тим, що обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана, а аналоговим входом - з датчиком маси вантажу, крім того вихідний канал мікроконтролерної системи поєднаний з цифровим входом силового перетворювача, який живить електропривод механізму переміщення візка.
Текст
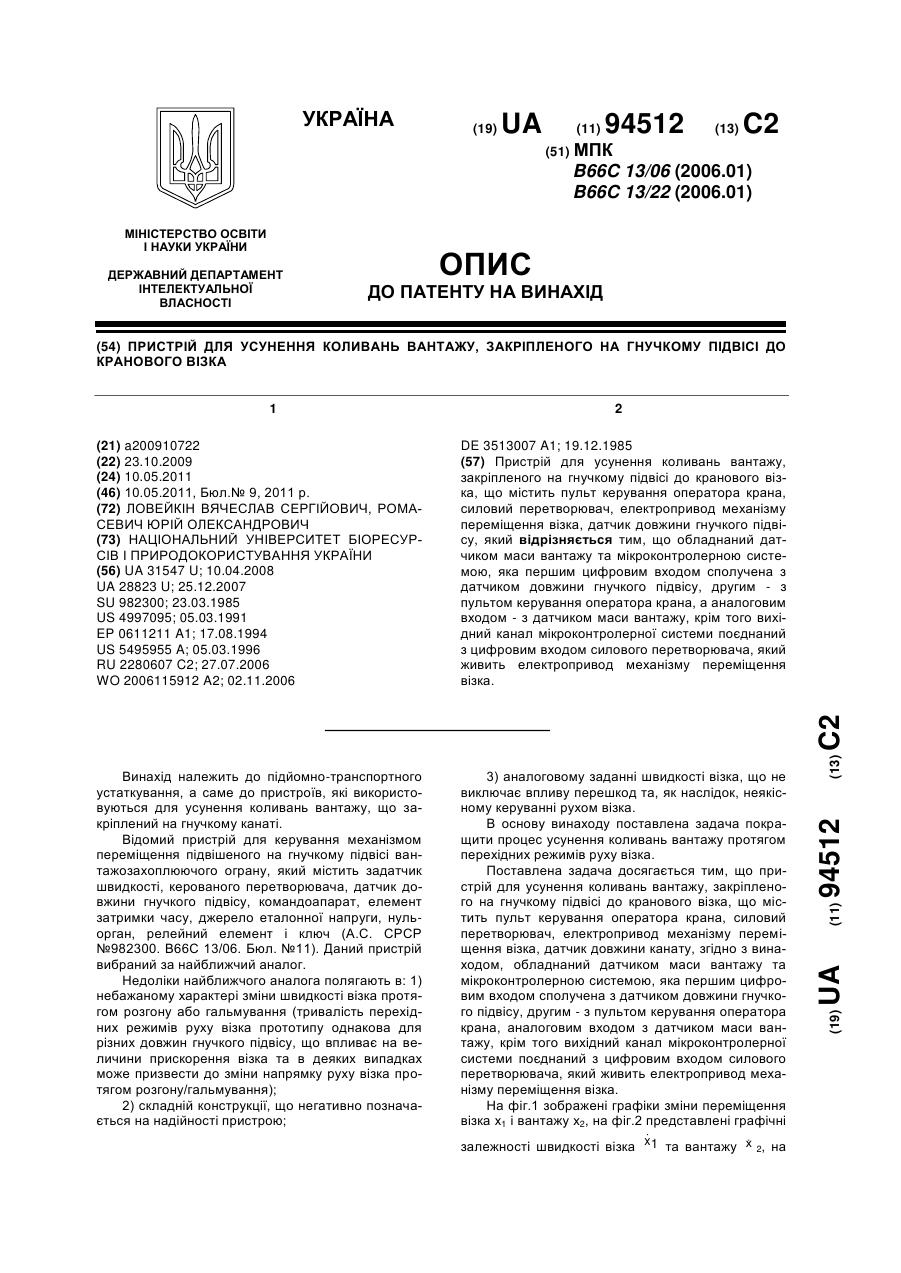
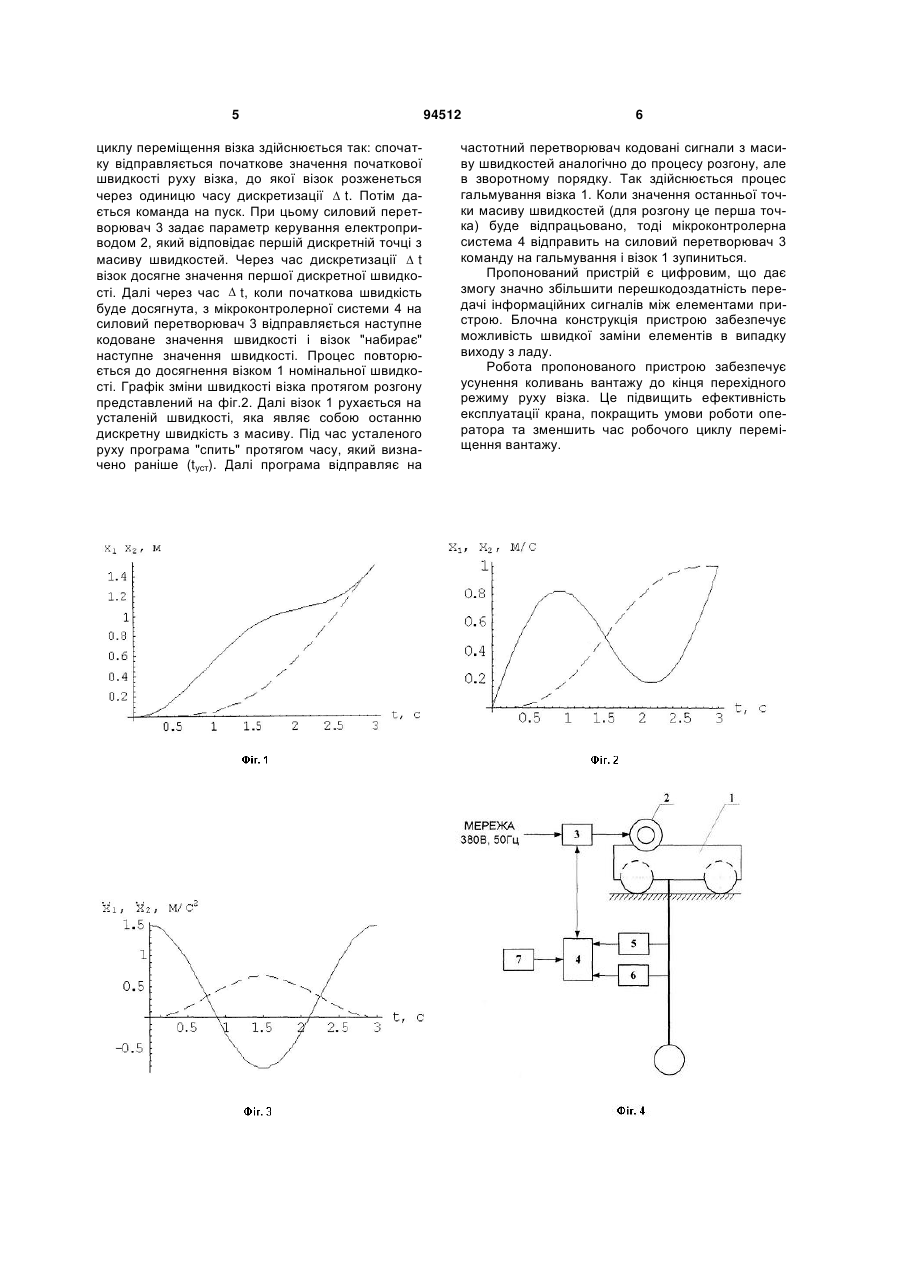
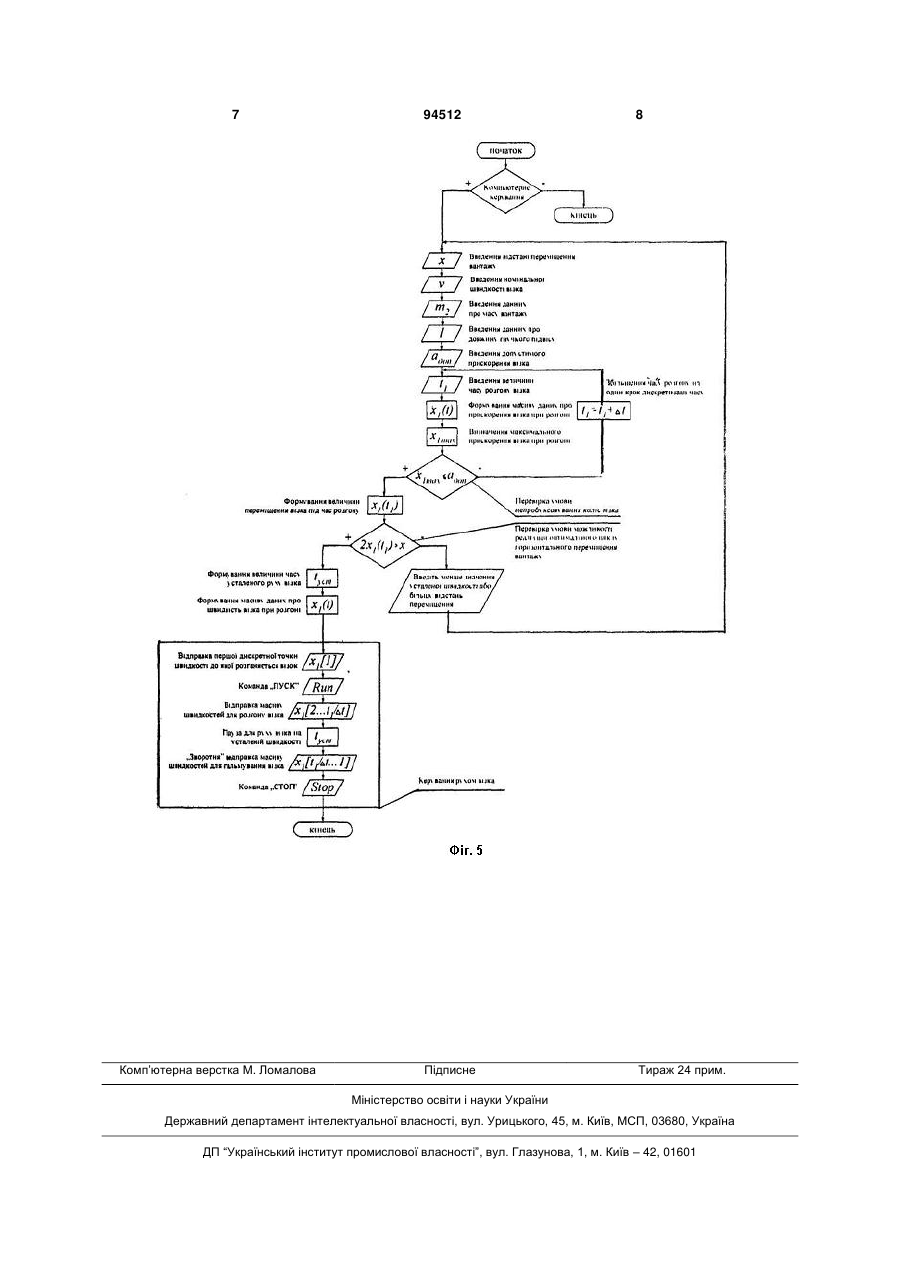
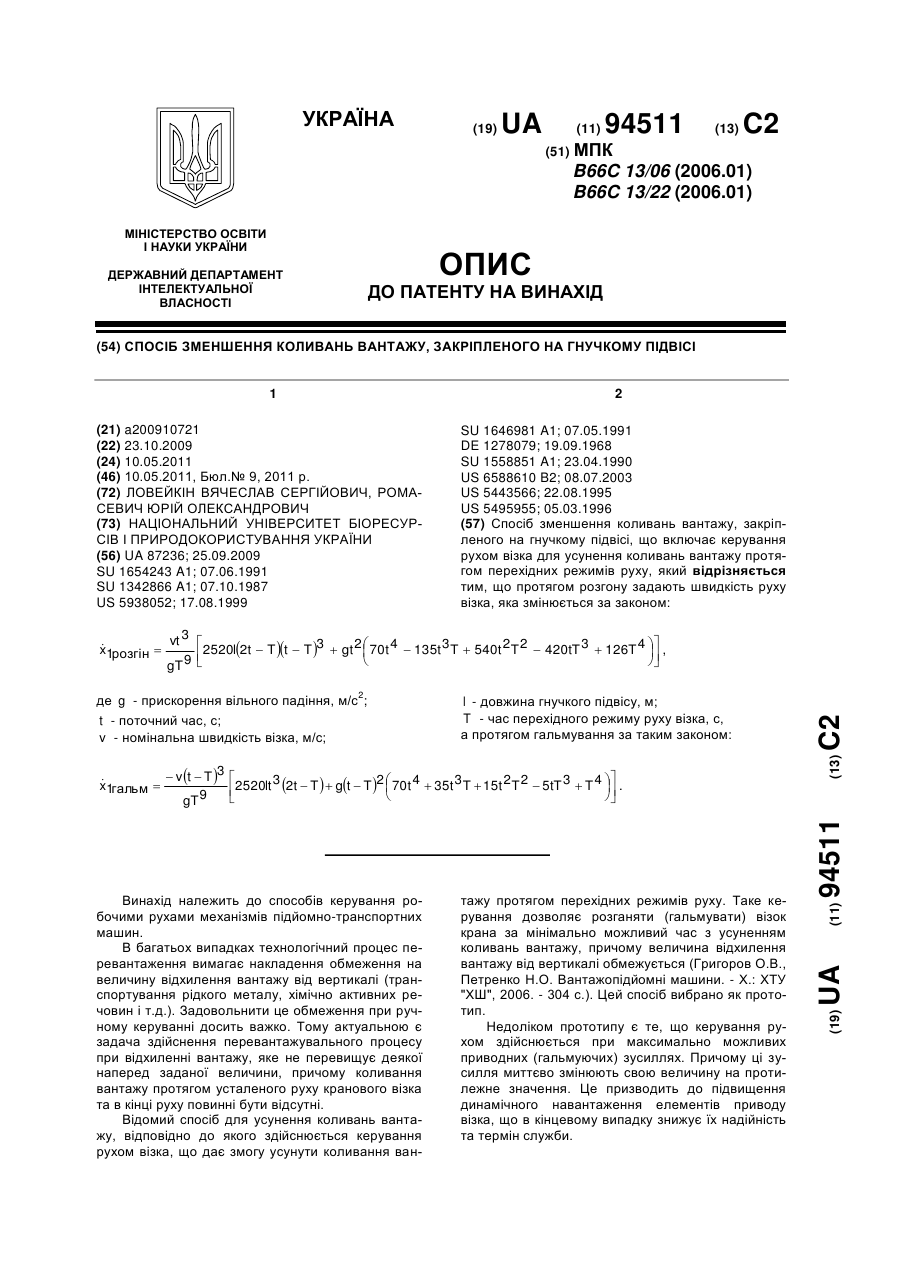
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини гнучкого підвісу, який відрізняється тим, що обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана, а аналоговим входом - з датчиком маси вантажу, крім того вихідний канал мікроконтролерної системи поєднаний з цифровим входом силового перетворювача, який живить електропривод механізму переміщення візка. Винахід належить до підйомно-транспортного устаткування, а саме до пристроїв, які використовуються для усунення коливань вантажу, що закріплений на гнучкому канаті. Відомий пристрій для керування механізмом переміщення підвішеного на гнучкому підвісі вантажозахоплюючого ограну, який містить задатчик швидкості, керованого перетворювача, датчик довжини гнучкого підвісу, командоапарат, елемент затримки часу, джерело еталонної напруги, нульорган, релейний елемент і ключ (А.С. СРСР №982300. В66С 13/06. Бюл. №11). Даний пристрій вибраний за найближчий аналог. Недоліки найближчого аналога полягають в: 1) небажаному характері зміни швидкості візка протягом розгону або гальмування (тривалість перехідних режимів руху візка прототипу однакова для різних довжин гнучкого підвісу, що впливає на величини прискорення візка та в деяких випадках може призвести до зміни напрямку руху візка протягом розгону/гальмування); 2) складній конструкції, що негативно позначається на надійності пристрою; 3) аналоговому заданні швидкості візка, що не виключає впливу перешкод та, як наслідок, неякісному керуванні рухом візка. В основу винаходу поставлена задача покращити процес усунення коливань вантажу протягом перехідних режимів руху візка. Поставлена задача досягається тим, що пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини канату, згідно з винаходом, обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана, аналоговим входом з датчиком маси вантажу, крім того вихідний канал мікроконтролерної системи поєднаний з цифровим входом силового перетворювача, який живить електропривод механізму переміщення візка. На фіг.1 зображені графіки зміни переміщення візка x1 і вантажу х2, на фіг.2 представлені графічні залежності швидкості візка x1 та вантажу x , на 2 (19) UA (11) 94512 (13) C2 (21) a200910722 (22) 23.10.2009 (24) 10.05.2011 (46) 10.05.2011, Бюл.№ 9, 2011 р. (72) ЛОВЕЙКІН ВЯЧЕСЛАВ СЕРГІЙОВИЧ, РОМАСЕВИЧ ЮРІЙ ОЛЕКСАНДРОВИЧ (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ БІОРЕСУРСІВ І ПРИРОДОКОРИСТУВАННЯ УКРАЇНИ (56) UA 31547 U; 10.04.2008 UA 28823 U; 25.12.2007 SU 982300; 23.03.1985 US 4997095; 05.03.1991 EP 0611211 A1; 17.08.1994 US 5495955 A; 05.03.1996 RU 2280607 C2; 27.07.2006 WO 2006115912 A2; 02.11.2006 3 фіг.3 показані графіки функції прискорення візка 1 та вантажу 2. Графіки на фігурах 1-3 побудоx x вані для режиму розгону візка з вантажем при таких параметрах: =1 м/с, m1=1000 кг, m2=3500 кг, =10 м, t1=3 с (графіки кінематичних характеристик візка зображені штриховою лінією). На фіг.4 показана функціональна схема запропонованого пристрою. На фіг.5. представлено алгоритм роботи пристрою. На вантажному візку 1 встановлений електропривод механізму переміщення 2, швидкість обертання якого регулюється силовим перетворювачем 3. Силовий перетворювач 3 через цифровий канал поєднаний з мікроконтролерною системою 4. На входи мікроконтролерної системи 4 подаються сигнали з датчика довжини гнучкого підвісу 5 (цифровий сигнал) та датчика ваги вантажу 6 (аналоговий сигнал, який оцифровується мікроконтролером). Для задання мікроконтролерній системі сигналу про напрямок та відстань переміщення візка використовується пульт керування 94512 4 оператора крана 7, який сполучений з мікроконтролерною системою 4. Пристрій працює наступним чином Алгоритм роботи пристрою зображений на фіг.5. Відповідно до цього алгоритму оператор крана вибирає вид керування, задає напрямок та відстань переміщення візка 1 і, якщо це потрібно, номінальну швидкість руху візка (це необхідно для того, щоб покращити роботу крана при транспортуванні вантажів на відносно великі або відносно малі відстані). Після цього мікропроцесорна система 4 опитує датчик довжини гнучкого підвісу 5 та датчик маси вантажу 6. Далі проходить введення даних про допустиме прискорення візка (ці дані попередньо задаються для даного виду кранового візка при налаштуванні роботи пристрою після монтажу) і початковий час розгону візка (не більше 1 с). Для заданого часу розгону візка визначається довжина масиву дискретних прискорень візка протягом розгону. Далі програма, яка записана на мікроконтролерній системі 4, заповнює елементи масиву даними - конкретними значеннями прискорення, які визначаються з формули: 1 (gt 1 g 2 t t 1 cos( t ) 2 g t cost t 1 g 2 sint t 1 sint g sint 1 x 1 g 4 2 t 2 4 cost 1 t 1 sint 1 , 1 де - частота власних маятникових коливань вантажу відносно візка під час перехідних режимів його руху, рад/с, яка визначається з формули: m1 m2 g , (2) m1 де m1 - маса візка, кг (m1=const); m2 - маса вантажу, кг; t1 - час перехідного режиму руху візка, с; - номінальна швидкість візка, м/с; - довжина гнучкого підвісу, м; 2 g - прискорення вільного падіння, м/с . Кожен наступний елемент масиву визначається при часі на час дискретизації t більше ніж попередній. Після закінчення формування масиву прикорень програма приступає до визначення маx ксимального значення прискорення 1maх. Це робиться порівнянням всіх елементів масиву між собою. Визначене максимальне значення прискорення порівнюється з допустимим (це робиться для того, щоб запобігти проковзуванню коліс візка при інтенсивному розгоні/гальмуванні), і якщо до пустиме прискорення буде менше, ніж максимальне, то програма збільшує час розгону на одиницю часу дискретизації і повторює цикл. Цикли повторюються, допоки не виконається умова 1max адоп. Якщо ж ця умова виконалась, то далі x програма визначає довжину переміщення візка протягом перехідних режимів руху та порівнює її з величиною заданої відстані переміщення. При невиконанні умови 2х1(t1) х програма видає повідомлення "Введіть менше значення усталеної швидкості або більшу швидкість переміщення" на екран панелі керування оператора крана (не показана) та виходить з циклу. В випадку виконання умови відбувається формування часу усталеного x 2x1( t1) руху візка t ycт . Довжина масиву прискорень рівна довжині масиву для дискретних значень швидкості. Таким чином, маючи кількість дискретних точок швидкості візка, програма обчислює їх за формулою: x1 (g(2tt1 2) 2g cos( t ) 2g cos( t t1) 2g cos( t1) sin( t ) gkt 3t gkt 1 k 3t1 2 g)t sink t t1 gt sint 1 g 4 2t 2 4 cost1 t1 sin( t1) , 1 (це відбувається аналогічно обчисленню дискретних прискорень) та записує їх в масив. Керування швидкістю обертання вала електроприводу 2 здійснюється шляхом відправки з (1) (3) мікроконтролерної системи 4 на силовий перетворювач 3 цифрових сигналів, які вказують, яку швидкість необхідно "відпрацювати" крановому візку. Процес відправки масиву швидкостей для всього 5 циклу переміщення візка здійснюється так: спочатку відправляється початкове значення початкової швидкості руху візка, до якої візок розженеться через одиницю часу дискретизації t. Потім дається команда на пуск. При цьому силовий перетворювач 3 задає параметр керування електроприводом 2, який відповідає першій дискретній точці з масиву швидкостей. Через час дискретизації t візок досягне значення першої дискретної швидкості. Далі через час t, коли початкова швидкість буде досягнута, з мікроконтролерної системи 4 на силовий перетворювач 3 відправляється наступне кодоване значення швидкості і візок "набирає" наступне значення швидкості. Процес повторюється до досягнення візком 1 номінальної швидкості. Графік зміни швидкості візка протягом розгону представлений на фіг.2. Далі візок 1 рухається на усталеній швидкості, яка являє собою останню дискретну швидкість з масиву. Під час усталеного руху програма "спить" протягом часу, який визначено раніше (tycт). Далі програма відправляє на 94512 6 частотний перетворювач кодовані сигнали з масиву швидкостей аналогічно до процесу розгону, але в зворотному порядку. Так здійснюється процес гальмування візка 1. Коли значення останньої точки масиву швидкостей (для розгону це перша точка) буде відпрацьовано, тоді мікроконтролерна система 4 відправить на силовий перетворювач 3 команду на гальмування і візок 1 зупиниться. Пропонований пристрій є цифровим, що дає змогу значно збільшити перешкодоздатність передачі інформаційних сигналів між елементами пристрою. Блочна конструкція пристрою забезпечує можливість швидкої заміни елементів в випадку виходу з ладу. Робота пропонованого пристрою забезпечує усунення коливань вантажу до кінця перехідного режиму руху візка. Це підвищить ефективність експлуатації крана, покращить умови роботи оператора та зменшить час робочого циклу переміщення вантажу. 7 Комп’ютерна верстка М. Ломалова 94512 8 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to eliminate vibrations of load fastened on flexible suspension to crane trolley
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюУстройство для устранения колебаний груза, прикрепленного на гибком подвесе к крановой тележке
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/06, B66C 13/22
Мітки: усунення, гнучкому, коливань, візка, закріпленого, кранового, підвісі, пристрій, вантажу
Код посилання
<a href="https://ua.patents.su/4-94512-pristrijj-dlya-usunennya-kolivan-vantazhu-zakriplenogo-na-gnuchkomu-pidvisi-do-kranovogo-vizka.html" target="_blank" rel="follow" title="База патентів України">Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка</a>
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 94511
Опубліковано: 10.05.2011
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22, B66C 13/06
Мітки: вантажу, підвісі, спосіб, закріпленого, коливань, гнучкому, зменшення
Формула / Реферат:
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом:,де - прискорення вільного...
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: підвісі, вантажем, візка, пристрій, приводом, гнучкому, керування
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04, B66C 13/22
Мітки: керування, крановим, гнучкому, підвісі, спосіб, візком, вантажем
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/00, B66C 13/22
Мітки: гнучкому, спосіб, підвісі, керування, вантажним, вантажем, візком
Формула / Реферат:
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: крана, підвішеного, вантажу, розгойдувань, пристрій, візка, обмеження
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Попередній патент: Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Наступний патент: Повзун поршневої машини
Випадковий патент: Спосіб формування дуплікатурного товстокишкового анастомозу у хворих на рак товстої кишки з супутнім дивертикульозом