Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 94511
Опубліковано: 10.05.2011
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович

Формула / Реферат
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом:
![]() ,
,
де ![]() - прискорення вільного падіння, м/с2;
- прискорення вільного падіння, м/с2;
![]() - поточний час, с
- поточний час, с
![]() - номінальна швидкість візка, м/с;
- номінальна швидкість візка, м/с;
![]() - довжина гнучкого підвісу, м;
- довжина гнучкого підвісу, м;
![]() - час перехідного режиму руху візка, с,
- час перехідного режиму руху візка, с,
а протягом гальмування за таким законом:
![]() .
.
Текст
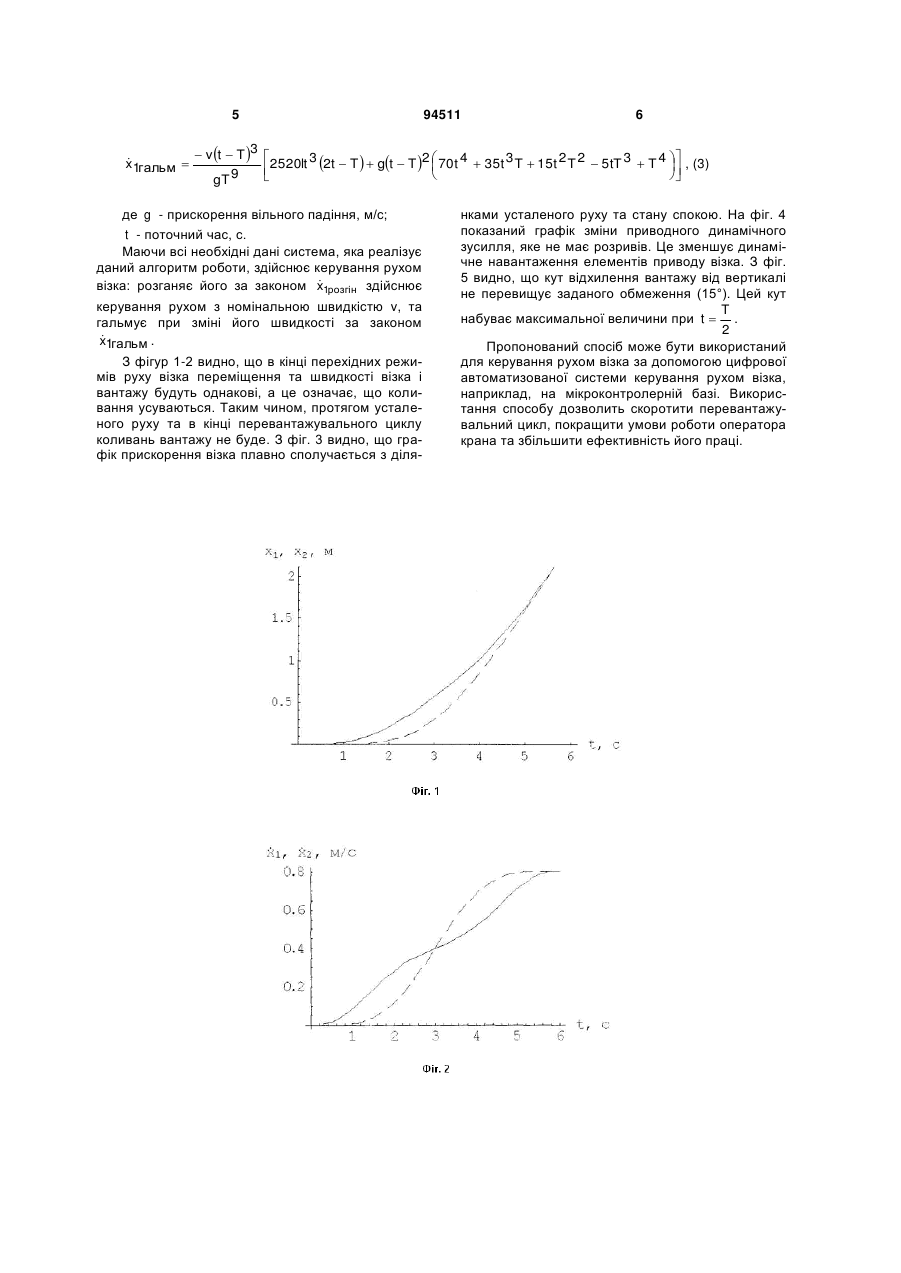
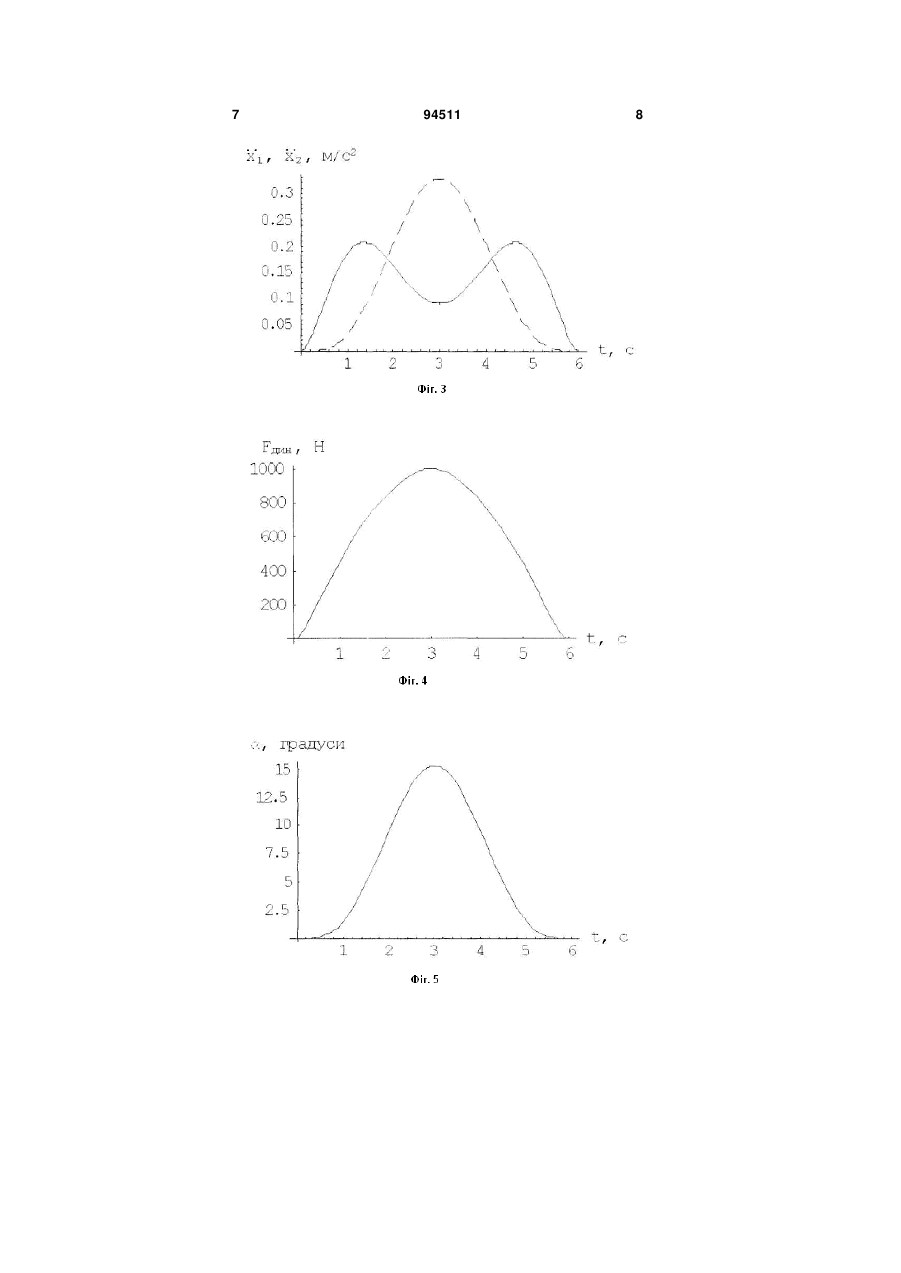
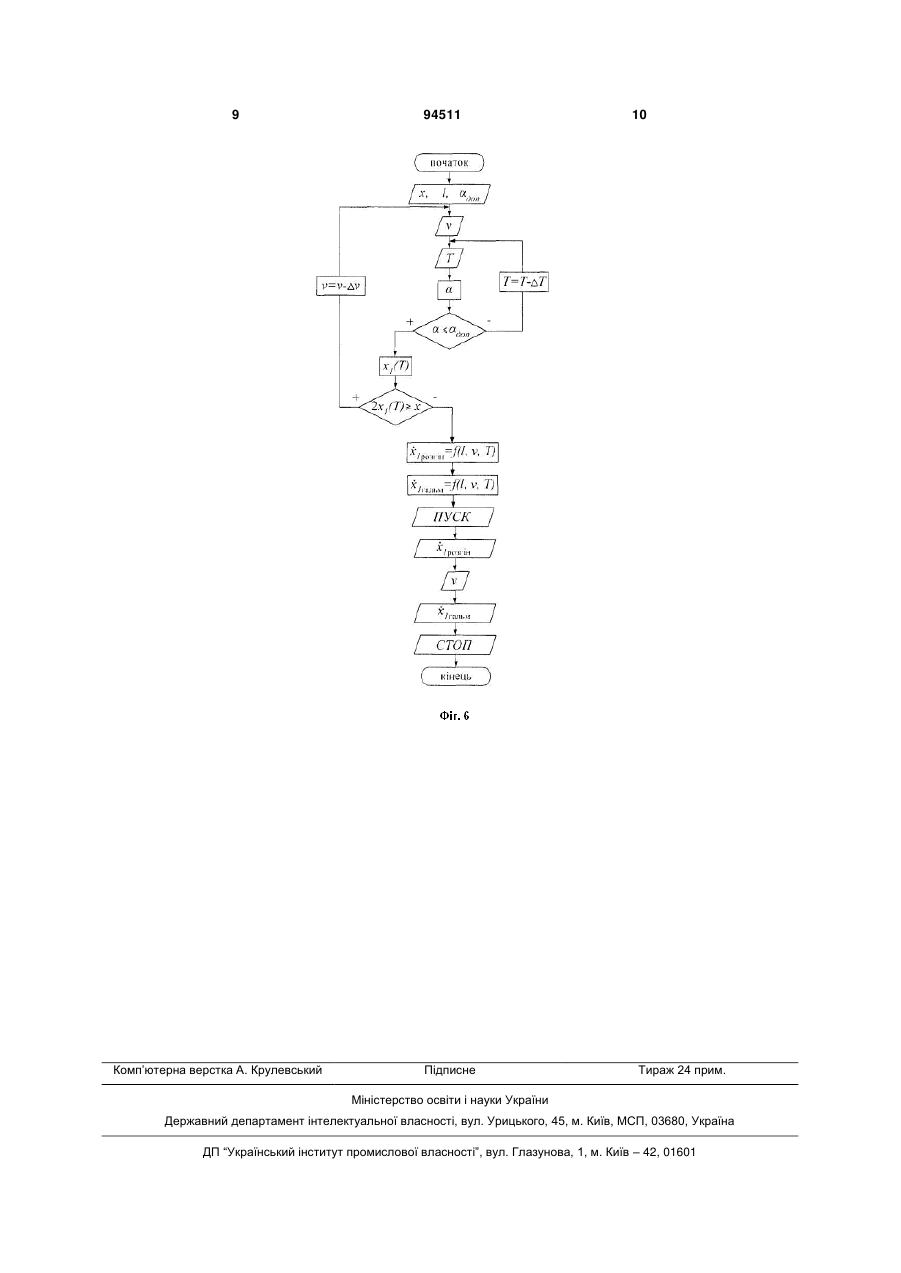
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом: тажу протягом перехідних режимів руху. Таке керування дозволяє розганяти (гальмувати) візок крана за мінімально можливий час з усуненням коливань вантажу, причому величина відхилення вантажу від вертикалі обмежується (Григоров О.В., Петренко Н.О. Вантажопідйомні машини. - X.: ХТУ "ХШ", 2006. - 304 с.). Цей спосіб вибрано як прототип. Недоліком прототипу є те, що керування рухом здійснюється при максимально можливих приводних (гальмуючих) зусиллях. Причому ці зусилля миттєво змінюють свою величину на протилежне значення. Це призводить до підвищення динамічного навантаження елементів приводу візка, що в кінцевому випадку знижує їх надійність та термін служби. (13) 94511 Винахід належить до способів керування робочими рухами механізмів підйомно-транспортних машин. В багатьох випадках технологічний процес перевантаження вимагає накладення обмеження на величину відхилення вантажу від вертикалі (транспортування рідкого металу, хімічно активних речовин і т.д.). Задовольнити це обмеження при ручному керуванні досить важко. Тому актуальною є задача здійснення перевантажувального процесу при відхиленні вантажу, яке не перевищує деякої наперед заданої величини, причому коливання вантажу протягом усталеного руху кранового візка та в кінці руху повинні бути відсутні. Відомий спосіб для усунення коливань вантажу, відповідно до якого здійснюється керування рухом візка, що дає змогу усунути коливання ван (11) 3 4 3 2 2 3 4 2 2520lt 2t T gt T 70t 35t T 15t T 5tT T . UA v t T 3 x1гальм gT 9 l - довжина гнучкого підвісу, м; T - час перехідного режиму руху візка, с, а протягом гальмування за таким законом: (19) 2 де g - прискорення вільного падіння, м/с ; t - поточний час, с; v - номінальна швидкість візка, м/с; C2 vt 3 2 4 3 2 2 3 4 3 x1розгін 2520l2t T t T gt 70t 135t T 540t T 420tT 126T , gT 9 3 94511 Винаходом поставлено задачу покращити динаміку руху кранового візка з усуненням коливань вантажу протягом перехідних режимів руху (розгін/гальмування) з обмеженням величини відхилення вантажу від вертикалі. Поставлена винаходом задача вирішується тим, що у способі зменшення коливань вантажу vt 3 x1розгін gT 9 4 закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, згідно з винаходом, протягом розгону задають швидкість руху візка, яка змінюється за законом: 2 4 3 2 2 3 4 3 2520l2t T t T gt 70t 135t T 540t T 420tT 126T , 2 де g - прискорення вільного падіння, м/с ; t - поточний час, с v - номінальна швидкість візка, м/с; v t T 3 x1гальм gT 9 l - довжина гнучкого підвісу, м; T - час перехідного режиму руху візка, с, а протягом гальмування за таким законом: 3 4 3 2 2 3 4 2 2520lt 2t T gt T 70t 35t T 15t T 5tT T . Таким чином, згідно з запропонованим способом, крановий візок протягом розгону (гальмування) рухається зі швидкістю, яка змінюється по певному закону, який описується поліномом десятого порядку від аргументу часу. В результаті, коливання вантажу усуваються. Крім того, час перехідного режиму вибирається таким, що обмеження на величину відхилення вантажу від вертикалі задовольняються. На фіг. 1 зображені графіки зміни переміщення візка x1 і вантажу x 2 , на фіг. 2 представлені гра фічні залежності швидкості візка x1 та вантажу x 2 , на фіг. 3 показані графіки функції прискорення x x візка 1 та вантажу 2 . Графіки на фігурах 1-3 побудовані для режиму розгону візка з вантажем при таких параметрах: номінальна швидкість руху візка v 0,8 м / с , маса візка m1 2000 кг , маса транспортованого вантажу m2 2500 кг , довжина гнучкого підвісу l 0,8 м / с , допустимий кут відхилення гнучкого підвісу від вертикалі доп 15 , (графіки кінематичних характеристик вантажу зображені штриховою лінією). На фіг. 4. зображений графік зміни динамічного зусилля, що діє на візок протягом розгону, (для режиму гальмування графік зміни приводного зусилля має таку ж форму, але розташований симетрично відносно осі абсцис). На фіг. 5 побудований графік зміни кута відхилення вантажу від вертикалі. На фіг. 6. представлено алгоритм реалізації способу. Відповідно до алгоритму реалізації способу (фіг. 6) в систему, яка реалізує пропонований спосіб, вводяться дані про відстань переміщення візка з вантажем x, довжину гнучкого підвісу l, та допус тиме відхилення гнучкого підвісу вантажу від вертикалі доп . Далі вводяться значення номінальної швидкості руху візка v та тривалості руху візка протягом перехідних режимів (пуск, гальмування) Т. Максимальне відхилення вантажу від вертикалі протягом розгону (гальмування) визначається за формулою: 0,251vl , (1) T де v - номінальна швидкість візка, м/с; l - довжина гнучкого підвісу, м; T - час перехідного режиму руху візка, с Отримане значення порівнюється з допустимим доп . Якщо умова доп не виконується, то час T збільшується на деяку величину T і цикл повторюється знову. Якщо ж умова виконалась, то далі відбувається формування величини відстані переміщення візка з вантажем протягом перехідного режиму x1T . Потім подвоєне значення відстані переміщення 2x1T порівнюється з заданою відстанню переміщення візка за весь цикл x . Це необхідно для того, щоб забезпечити можливість реалізації циклу переміщення візка з вантажем, наприклад, на невеликі відстані. Якщо відстань, яку візок проїде протягом перехідних режимів руху більша за задану відстань x (умова 2x1T x виконується), то номінальна швидкість візка зменшується на деяку величину v і цикл повторюється. Якщо ж умова 2x1T x не виконується, відбувається формування функції швидкості руху візка протягом розгону за формулою: vt 3 x1розгін 2520l2t T t T 3 gt 2 70t 4 135t 3 T 540t 2 T 2 420tT 3 126T 4 , (2) 9 gT а також функції швидкості візка протягом гальмування за формулою: 5 v t T 3 x1гальм gT 9 94511 6 3 4 3 2 2 3 4 2 2520lt 2t T gt T 70t 35t T 15t T 5tT T , (3) де g - прискорення вільного падіння, м/с; t - поточний час, с. Маючи всі необхідні дані система, яка реалізує даний алгоритм роботи, здійснює керування рухом візка: розганяє його за законом x1розгін здійснює керування рухом з номінальною швидкістю v, та гальмує при зміні його швидкості за законом x1гальм . З фігур 1-2 видно, що в кінці перехідних режимів руху візка переміщення та швидкості візка і вантажу будуть однакові, а це означає, що коливання усуваються. Таким чином, протягом усталеного руху та в кінці перевантажувального циклу коливань вантажу не буде. З фіг. 3 видно, що графік прискорення візка плавно сполучається з діля нками усталеного руху та стану спокою. На фіг. 4 показаний графік зміни приводного динамічного зусилля, яке не має розривів. Це зменшує динамічне навантаження елементів приводу візка. З фіг. 5 видно, що кут відхилення вантажу від вертикалі не перевищує заданого обмеження (15°). Цей кут T набуває максимальної величини при t . 2 Пропонований спосіб може бути використаний для керування рухом візка за допомогою цифрової автоматизованої системи керування рухом візка, наприклад, на мікроконтролерній базі. Використання способу дозволить скоротити перевантажувальний цикл, покращити умови роботи оператора крана та збільшити ефективність його праці. 7 94511 8 9 Комп’ютерна верстка А. Крулевський 94511 Підписне 10 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of reducing vibration of cargo fastened on flexible suspension
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ уменьшения колебаний груза, закрепленного на гибком подвесе
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/06, B66C 13/22
Мітки: коливань, вантажу, підвісі, закріпленого, гнучкому, зменшення, спосіб
Код посилання
<a href="https://ua.patents.su/5-94511-sposib-zmenshennya-kolivan-vantazhu-zakriplenogo-na-gnuchkomu-pidvisi.html" target="_blank" rel="follow" title="База патентів України">Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі</a>
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/04, B66C 13/22
Мітки: вантажем, спосіб, гнучкому, крановим, керування, візком, підвісі
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/00, B66C 13/22
Мітки: візком, вантажем, вантажним, гнучкому, керування, підвісі, спосіб
Формула / Реферат:
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при...
Пристрій для керування приводом візка з вантажем на гнучкому підвісі
Номер патенту: 28823
Опубліковано: 25.12.2007
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович
МПК: B66C 13/04
Мітки: вантажем, гнучкому, пристрій, приводом, візка, підвісі, керування
Формула / Реферат:
Пристрій для керування приводом візка з вантажем на гнучкому підвісі, що містить датчик довжини підвісу, блок пам'яті, компаратор, блок пам'яті, який відрізняється тим, що пристрій додатково обладнаний арифметичним блоком, на входи якого підключені блок формування маси візка, датчик довжини гнучкого підвісу, датчик швидкості візка та підключений через аналого-цифровий перетворювач датчик маси вантажу, при цьому вихід арифметичного пристрою...
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні
Номер патенту: 67476
Опубліковано: 15.06.2004
Автори: Крупко Валерій Григорович, Дорохов Микола Юрійович
МПК: B66D 5/00, F16G 13/00
Мітки: розгойдування, зменшення, вантажу, пристрій, гальмуванні, пуску
Формула / Реферат:
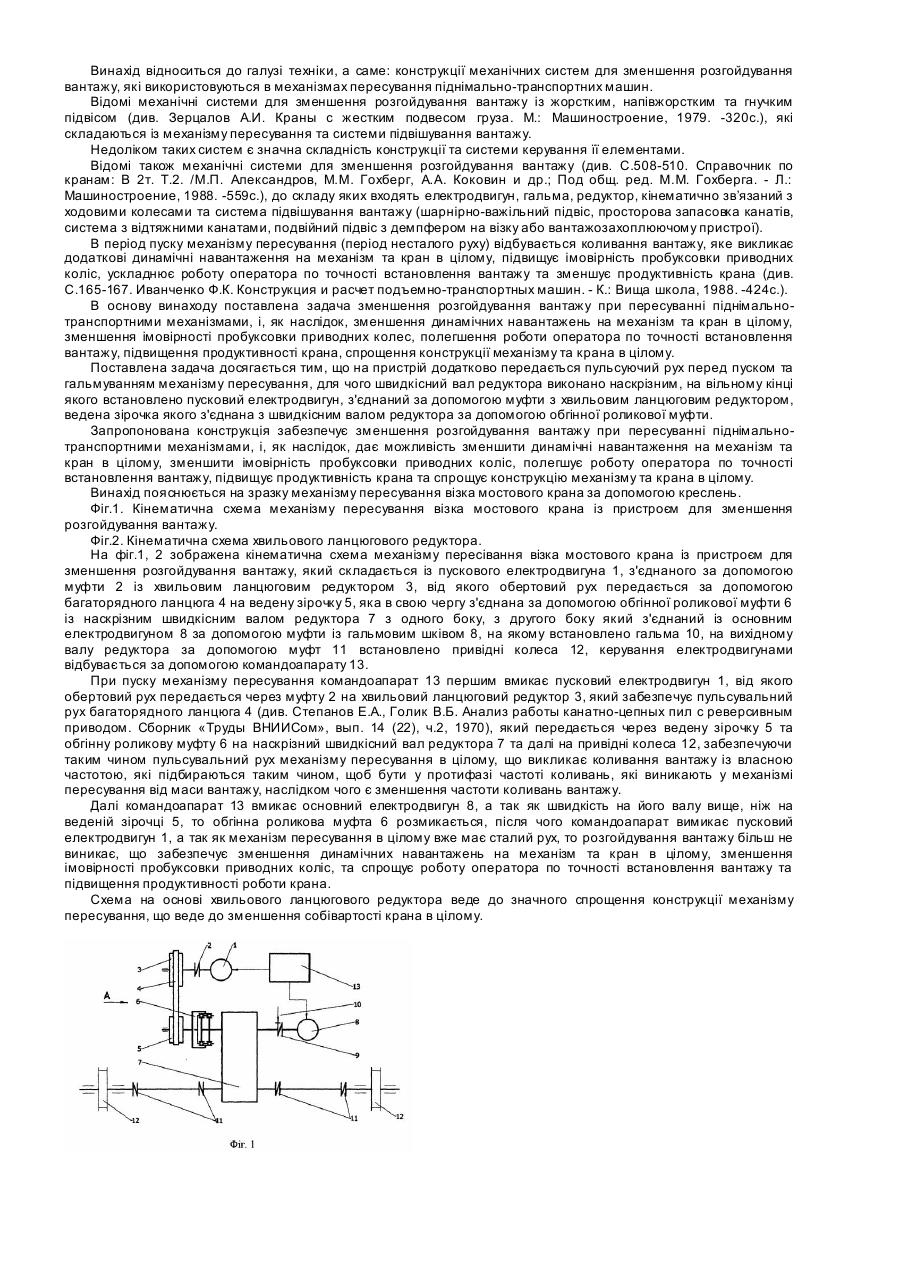
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні, до складу якого входять електродвигун, гальма, редуктор, кінематично зв'язаний з ходовими колесами та системи підвішування вантажу, який відрізняється тим, що для додаткової передачі пульсуючого руху перед пуском та гальмуванням механізму пересування швидкісний вал редуктора виконано наскрізним, на вільному кінці вала встановлено пусковий електродвигун, з'єднаний за...
Пристрій для зменшення розгойдування вантажу
Номер патенту: 13469
Опубліковано: 17.04.2006
Автор: Дорохов Микола Юрійович
МПК: F16G 13/00
Мітки: зменшення, пристрій, вантажу, розгойдування
Формула / Реферат:
Пристрій для зменшення розгойдування вантажу, що містить електродвигун, гальма, редуктор, кінематично зв'язаний з ходовими колесами, та систему підвішування вантажу, швидкісний вал редуктора виконано наскрізним, на вільному кінці якого встановлено пусковий електродвигун, з'єднаний за допомогою муфти з хвильовим ланцюговим редуктором, ведена зірочка якого з'єднана із швидкісним валом редуктора за допомогою обгінної роликової муфти, який...
Попередній патент: Котельна установка
Наступний патент: Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка
Випадковий патент: Спосіб первинної профілактики дітей, які часто хворіють на респіраторні захворювання