Привід рукавичного автомата
Номер патенту: 102873
Опубліковано: 25.11.2015
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович, Музичишин Сергій Володимирович


Формула / Реферат
Привід рукавичного автомата, що містить з'єднані між собою електродвигун, ланцюгову передачу з тяговим ланцюгом, проміжну та в'язальну каретки з направляючими та дві пружини стиску, встановлені на направляючих в'язальної каретки по різні її боки з можливістю переміщення до в'язальної каретки, причому проміжна каретка з'єднана з тяговим ланцюгом та в'язальною кареткою, який відрізняється тим, що додатково обладнаний двома втулками з зовнішньою та внутрішньою різьбами, нагвинченими на пружину стиску, та двома нерухомими гайками, в кожну з яких загвинчена втулка, при цьому кроки пружини стиску, зовнішньої та внутрішньої різьб втулки вибирають із умови:
t=t1-t2,
де t - крок пружини стиску;
t1 - крок зовнішньої різьби втулки;
t2 - крок внутрішньої різьби втулки.
Текст
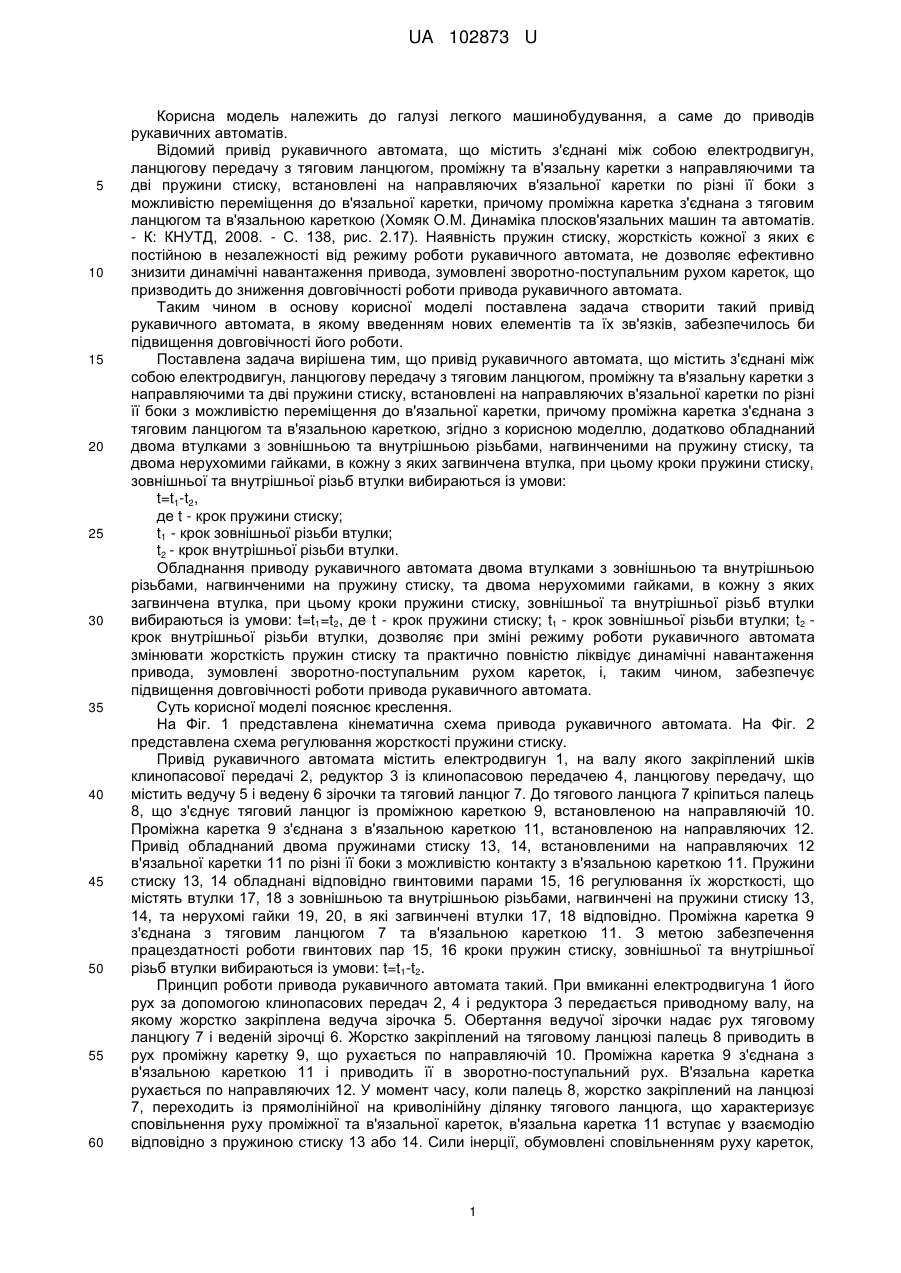
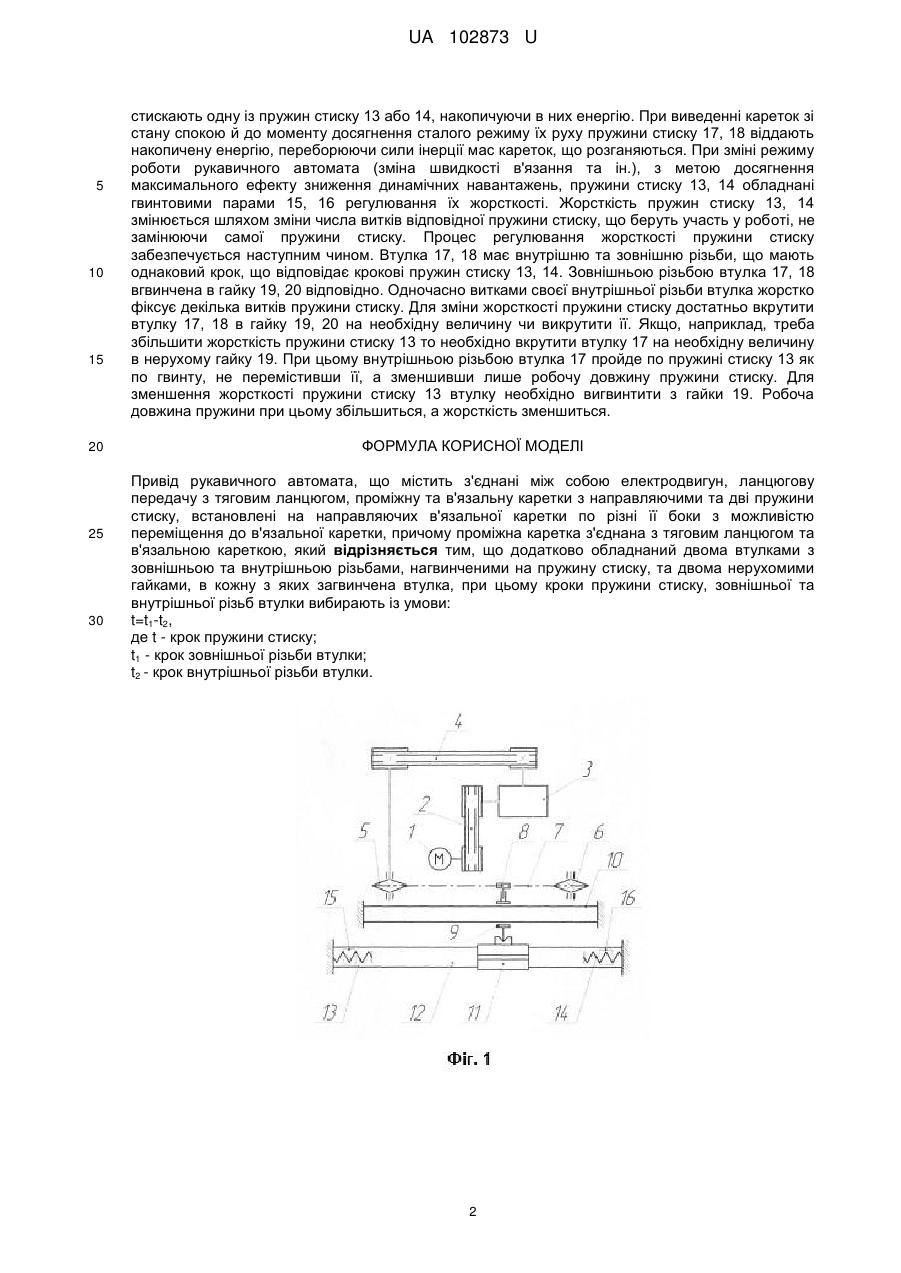
Реферат: Привід рукавичного автомата містить з'єднані між собою електродвигун, ланцюгову передачу з тяговим ланцюгом, проміжну та в'язальну каретки з направляючими та дві пружини стиску, встановлені на направляючих в'язальної каретки по різні її боки з можливістю переміщення до в'язальної каретки, проміжна каретка з'єднана з тяговим ланцюгом та в'язальною кареткою. Додатково обладнаний двома втулками з зовнішньою та внутрішньою різьбами, нагвинченими на пружину стиску, та двома нерухомими гайками, в кожну з яких загвинчена втулка. Кроки пружини стиску, зовнішньої та внутрішньої різьб втулки вибирають із умови: t=t1-t2, де t - крок пружини стиску; t1 - крок зовнішньої різьби втулки; t2 - крок внутрішньої різьби втулки. UA 102873 U (54) ПРИВІД РУКАВИЧНОГО АВТОМАТА UA 102873 U UA 102873 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить з'єднані між собою електродвигун, ланцюгову передачу з тяговим ланцюгом, проміжну та в'язальну каретки з направляючими та дві пружини стиску, встановлені на направляючих в'язальної каретки по різні її боки з можливістю переміщення до в'язальної каретки, причому проміжна каретка з'єднана з тяговим ланцюгом та в'язальною кареткою (Хомяк О.М. Динаміка плосков'язальних машин та автоматів. - К: КНУТД, 2008. - С. 138, рис. 2.17). Наявність пружин стиску, жорсткість кожної з яких є постійною в незалежності від режиму роботи рукавичного автомата, не дозволяє ефективно знизити динамічні навантаження привода, зумовлені зворотно-поступальним рухом кареток, що призводить до зниження довговічності роботи привода рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності його роботи. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить з'єднані між собою електродвигун, ланцюгову передачу з тяговим ланцюгом, проміжну та в'язальну каретки з направляючими та дві пружини стиску, встановлені на направляючих в'язальної каретки по різні її боки з можливістю переміщення до в'язальної каретки, причому проміжна каретка з'єднана з тяговим ланцюгом та в'язальною кареткою, згідно з корисною моделлю, додатково обладнаний двома втулками з зовнішньою та внутрішньою різьбами, нагвинченими на пружину стиску, та двома нерухомими гайками, в кожну з яких загвинчена втулка, при цьому кроки пружини стиску, зовнішньої та внутрішньої різьб втулки вибираються із умови: t=t1-t2, де t - крок пружини стиску; t1 - крок зовнішньої різьби втулки; t2 - крок внутрішньої різьби втулки. Обладнання приводу рукавичного автомата двома втулками з зовнішньою та внутрішньою різьбами, нагвинченими на пружину стиску, та двома нерухомими гайками, в кожну з яких загвинчена втулка, при цьому кроки пружини стиску, зовнішньої та внутрішньої різьб втулки вибираються із умови: t=t1=t2, де t - крок пружини стиску; t1 - крок зовнішньої різьби втулки; t2 крок внутрішньої різьби втулки, дозволяє при зміні режиму роботи рукавичного автомата змінювати жорсткість пружин стиску та практично повністю ліквідує динамічні навантаження привода, зумовлені зворотно-поступальним рухом кареток, і, таким чином, забезпечує підвищення довговічності роботи привода рукавичного автомата. Суть корисної моделі пояснює креслення. На Фіг. 1 представлена кінематична схема привода рукавичного автомата. На Фіг. 2 представлена схема регулювання жорсткості пружини стиску. Привід рукавичного автомата містить електродвигун 1, на валу якого закріплений шків клинопасової передачі 2, редуктор 3 із клинопасовою передачею 4, ланцюгову передачу, що містить ведучу 5 і ведену 6 зірочки та тяговий ланцюг 7. До тягового ланцюга 7 кріпиться палець 8, що з'єднує тяговий ланцюг із проміжною кареткою 9, встановленою на направляючій 10. Проміжна каретка 9 з'єднана з в'язальною кареткою 11, встановленою на направляючих 12. Привід обладнаний двома пружинами стиску 13, 14, встановленими на направляючих 12 в'язальної каретки 11 по різні її боки з можливістю контакту з в'язальною кареткою 11. Пружини стиску 13, 14 обладнані відповідно гвинтовими парами 15, 16 регулювання їх жорсткості, що містять втулки 17, 18 з зовнішньою та внутрішньою різьбами, нагвинчені на пружини стиску 13, 14, та нерухомі гайки 19, 20, в які загвинчені втулки 17, 18 відповідно. Проміжна каретка 9 з'єднана з тяговим ланцюгом 7 та в'язальною кареткою 11. З метою забезпечення працездатності роботи гвинтових пар 15, 16 кроки пружин стиску, зовнішньої та внутрішньої різьб втулки вибираються із умови: t=t1-t2. Принцип роботи привода рукавичного автомата такий. При вмиканні електродвигуна 1 його рух за допомогою клинопасових передач 2, 4 і редуктора 3 передається приводному валу, на якому жорстко закріплена ведуча зірочка 5. Обертання ведучої зірочки надає рух тяговому ланцюгу 7 і веденій зірочці 6. Жорстко закріплений на тяговому ланцюзі палець 8 приводить в рух проміжну каретку 9, що рухається по направляючій 10. Проміжна каретка 9 з'єднана з в'язальною кареткою 11 і приводить її в зворотно-поступальний рух. В'язальна каретка рухається по направляючих 12. У момент часу, коли палець 8, жорстко закріплений на ланцюзі 7, переходить із прямолінійної на криволінійну ділянку тягового ланцюга, що характеризує сповільнення руху проміжної та в'язальної кареток, в'язальна каретка 11 вступає у взаємодію відповідно з пружиною стиску 13 або 14. Сили інерції, обумовлені сповільненням руху кареток, 1 UA 102873 U 5 10 15 20 25 30 стискають одну із пружин стиску 13 або 14, накопичуючи в них енергію. При виведенні кареток зі стану спокою й до моменту досягнення сталого режиму їх руху пружини стиску 17, 18 віддають накопичену енергію, переборюючи сили інерції мас кареток, що розганяються. При зміні режиму роботи рукавичного автомата (зміна швидкості в'язання та ін.), з метою досягнення максимального ефекту зниження динамічних навантажень, пружини стиску 13, 14 обладнані гвинтовими парами 15, 16 регулювання їх жорсткості. Жорсткість пружин стиску 13, 14 змінюється шляхом зміни числа витків відповідної пружини стиску, що беруть участь у роботі, не замінюючи самої пружини стиску. Процес регулювання жорсткості пружини стиску забезпечується наступним чином. Втулка 17, 18 має внутрішню та зовнішню різьби, що мають однаковий крок, що відповідає крокові пружин стиску 13, 14. Зовнішньою різьбою втулка 17, 18 вгвинчена в гайку 19, 20 відповідно. Одночасно витками своєї внутрішньої різьби втулка жорстко фіксує декілька витків пружини стиску. Для зміни жорсткості пружини стиску достатньо вкрутити втулку 17, 18 в гайку 19, 20 на необхідну величину чи викрутити її. Якщо, наприклад, треба збільшити жорсткість пружини стиску 13 то необхідно вкрутити втулку 17 на необхідну величину в нерухому гайку 19. При цьому внутрішньою різьбою втулка 17 пройде по пружині стиску 13 як по гвинту, не перемістивши її, а зменшивши лише робочу довжину пружини стиску. Для зменшення жорсткості пружини стиску 13 втулку необхідно вигвинтити з гайки 19. Робоча довжина пружини при цьому збільшиться, а жорсткість зменшиться. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Привід рукавичного автомата, що містить з'єднані між собою електродвигун, ланцюгову передачу з тяговим ланцюгом, проміжну та в'язальну каретки з направляючими та дві пружини стиску, встановлені на направляючих в'язальної каретки по різні її боки з можливістю переміщення до в'язальної каретки, причому проміжна каретка з'єднана з тяговим ланцюгом та в'язальною кареткою, який відрізняється тим, що додатково обладнаний двома втулками з зовнішньою та внутрішньою різьбами, нагвинченими на пружину стиску, та двома нерухомими гайками, в кожну з яких загвинчена втулка, при цьому кроки пружини стиску, зовнішньої та внутрішньої різьб втулки вибирають із умови: t=t1-t2, де t - крок пружини стиску; t1 - крок зовнішньої різьби втулки; t2 - крок внутрішньої різьби втулки. 2 UA 102873 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of glove of automated device
Автори англійськоюPipa Borys Fedorovych, Muzychyshyn Sergii Volodymyrovych, Chaban Oleksii Vitaliyovych
Назва патенту російськоюПривод перчаточного автомата
Автори російськоюПипа Борис Федорович, Музычишин Сергей Владимирович, Чабан Алексей Витальевич
МПК / Мітки
МПК: D04B 15/16
Мітки: автомата, привід, рукавичного
Код посилання
<a href="https://ua.patents.su/5-102873-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата
Номер патенту: 98249
Опубліковано: 27.04.2015
Автори: Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: рукавичного, автомата, привід
Формула / Реферат:
Привід рукавичного автомата, що містить зв'язані між собою електродвигун, ланцюгову передачу, що містить ведучу, ведену зірочки та ланцюг, проміжну та в'язальну каретки з напрямними, з'єднані між собою, та пружину розтягу, встановлену в напрямній проміжної каретки з можливістю взаємодії з нею, причому проміжна каретка з'єднана з ланцюгом та в'язальною кареткою послідовно, який відрізняється тим, що додатково обладнаний двома пружинами...
Привід рукавичного автомата
Номер патенту: 98535
Опубліковано: 27.04.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: привід, рукавичного, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково оснащений двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з...
Привід рукавичного автомата
Номер патенту: 102212
Опубліковано: 26.10.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович, Чабан Олексій Віталійович, Павленко Георгій Іванович
МПК: D04B 15/16
Мітки: привід, рукавичного, автомата
Формула / Реферат:
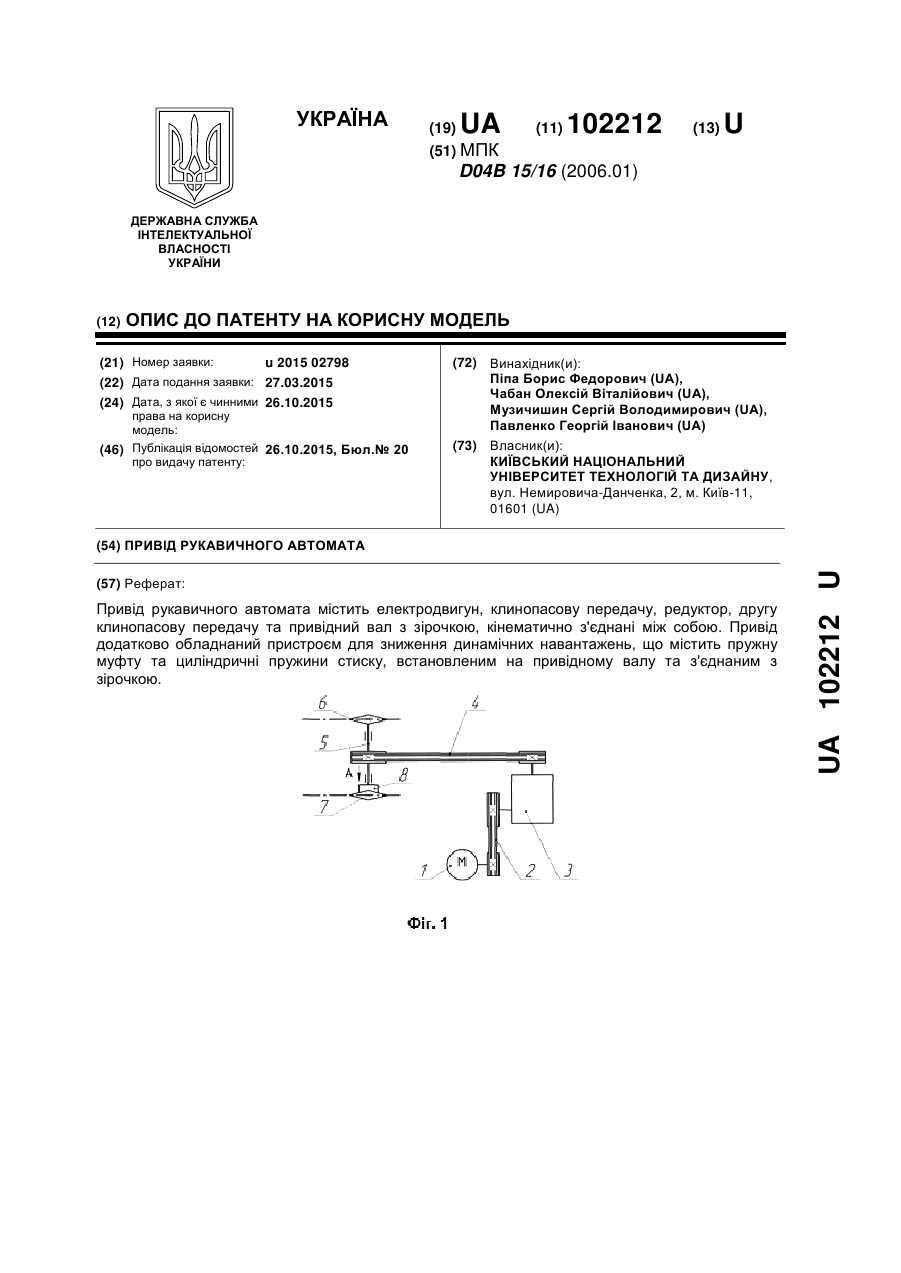
Привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний пристроєм для зниження динамічних навантажень, що містить пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою.
Привід рукавичного автомата

Номер патенту: 94412
Опубліковано: 10.11.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, дві передачі з гнучкою в'яззю, редуктор та приводний вал, кінематично з'єднані між собою, причому одна з передач з гнучкою в'яззю з'єднує електродвигун з редуктором, а друга передача з гнучкою в'яззю з'єднує редуктор з приводним валом, який відрізняється тим, що передача з гнучкою в'яззю, що з'єднує редуктор з приводним валом, виконана ланцюговою з зубчастим ланцюгом.
Привід в’язальної каретки рукавичного автомата
Номер патенту: 93984
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96
Мітки: привід, рукавичного, в'язальної, автомата, каретки
Формула / Реферат:
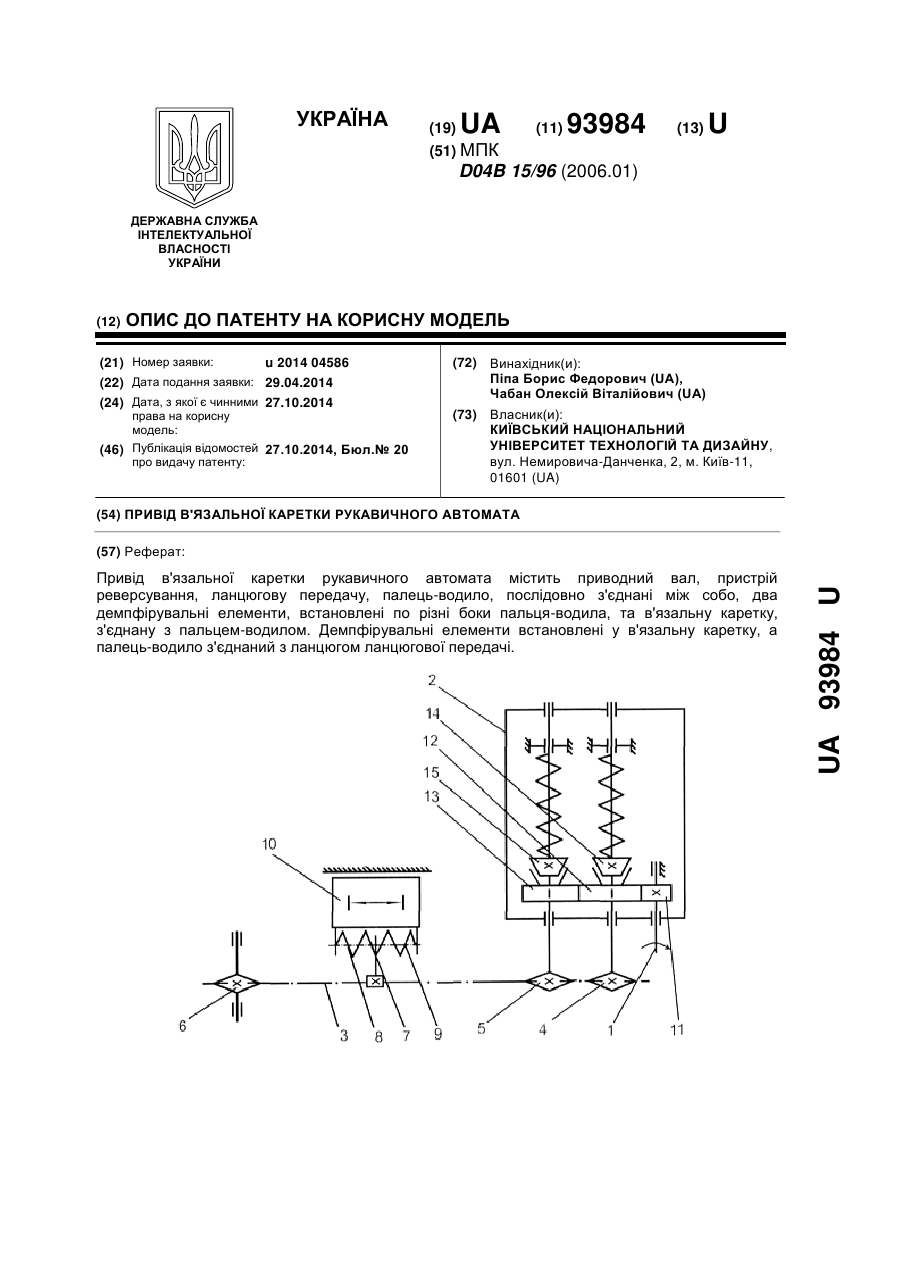
1. Привід в'язальної каретки рукавичного автомата, що містить приводний вал, пристрій реверсування, ланцюгову передачу, палець-водило, послідовно з'єднані між собою, два демпфірувальні елементи, встановлені по різні боки пальця-водила, та в'язальну каретку, з'єднану з пальцем-водилом, який відрізняється тим, що демпфірувальні елементи встановлені у в'язальну каретку, а палець-водило з'єднаний з ланцюгом ланцюгової передачі.2. Привід...
Попередній патент: Спосіб формування ізоляційного покриття оксиду магнію на нагрівному елементі
Наступний патент: Спосіб захисту сої від шкідливих організмів при вирощуванні на зрошуваних землях
Випадковий патент: Комбінований ґрунтообробний робочий орган