Привід рукавичного автомата
Номер патенту: 98535
Опубліковано: 27.04.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович
Формула / Реферат
Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково оснащений двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з можливістю взаємодії кожної циліндричної пружини стиску із проміжною кареткою в момент переходу проміжної каретки із прямолінійної ділянки ланцюгової передачі на криволінійну ділянку.
Текст
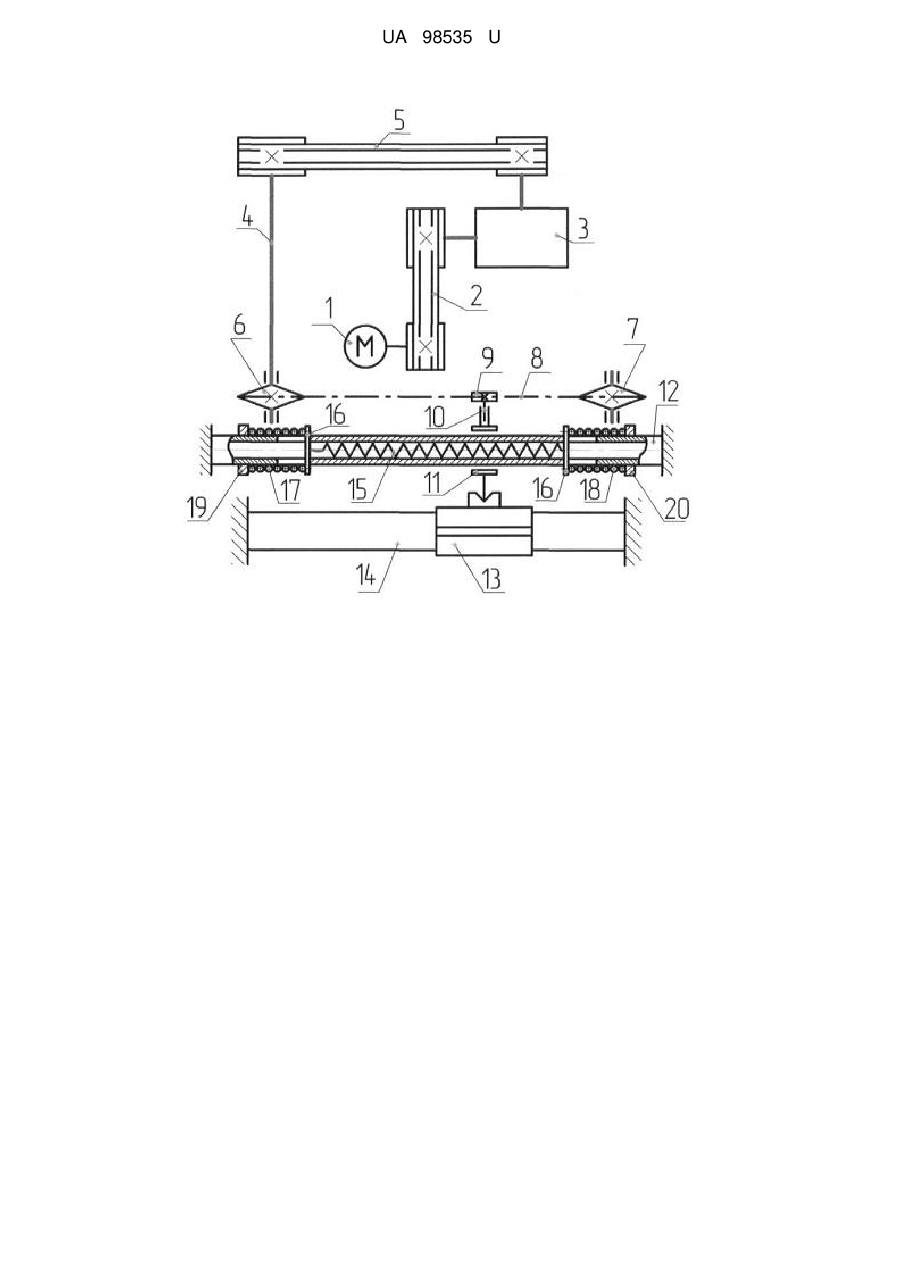
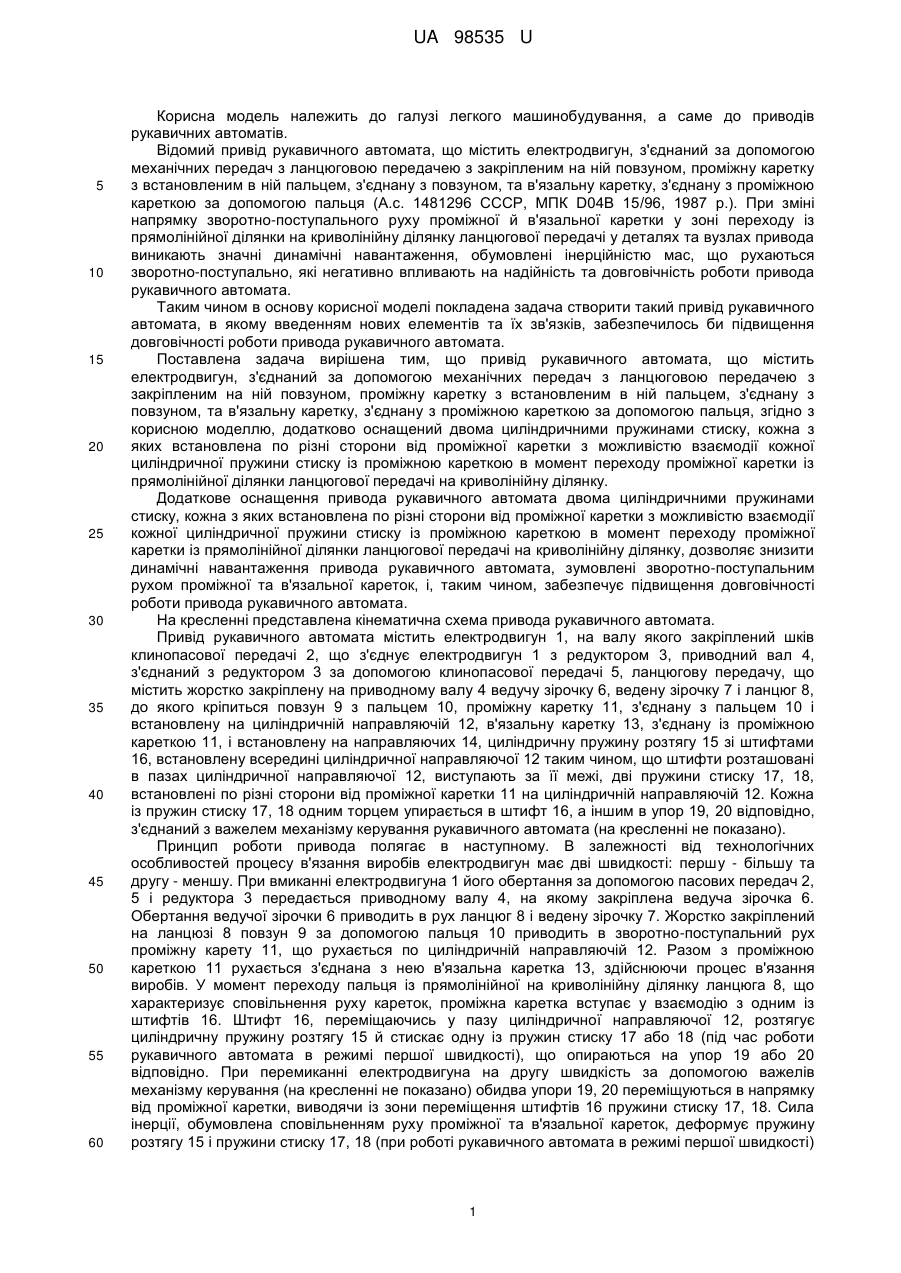
Реферат: UA 98535 U UA 98535 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця (А.с. 1481296 СССР, МПК D04В 15/96, 1987 р.). При зміні напрямку зворотно-поступального руху проміжної й в'язальної каретки у зоні переходу із прямолінійної ділянки на криволінійну ділянку ланцюгової передачі у деталях та вузлах привода виникають значні динамічні навантаження, обумовлені інерційністю мас, що рухаються зворотно-поступально, які негативно впливають на надійність та довговічність роботи привода рукавичного автомата. Таким чином в основу корисної моделі покладена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності роботи привода рукавичного автомата. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, згідно з корисною моделлю, додатково оснащений двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з можливістю взаємодії кожної циліндричної пружини стиску із проміжною кареткою в момент переходу проміжної каретки із прямолінійної ділянки ланцюгової передачі на криволінійну ділянку. Додаткове оснащення привода рукавичного автомата двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з можливістю взаємодії кожної циліндричної пружини стиску із проміжною кареткою в момент переходу проміжної каретки із прямолінійної ділянки ланцюгової передачі на криволінійну ділянку, дозволяє знизити динамічні навантаження привода рукавичного автомата, зумовлені зворотно-поступальним рухом проміжної та в'язальної кареток, і, таким чином, забезпечує підвищення довговічності роботи привода рукавичного автомата. На кресленні представлена кінематична схема привода рукавичного автомата. Привід рукавичного автомата містить електродвигун 1, на валу якого закріплений шків клинопасової передачі 2, що з'єднує електродвигун 1 з редуктором 3, приводний вал 4, з'єднаний з редуктором 3 за допомогою клинопасової передачі 5, ланцюгову передачу, що містить жорстко закріплену на приводному валу 4 ведучу зірочку 6, ведену зірочку 7 і ланцюг 8, до якого кріпиться повзун 9 з пальцем 10, проміжну каретку 11, з'єднану з пальцем 10 і встановлену на циліндричній направляючій 12, в'язальну каретку 13, з'єднану із проміжною кареткою 11, і встановлену на направляючих 14, циліндричну пружину розтягу 15 зі штифтами 16, встановлену всередині циліндричної направляючої 12 таким чином, що штифти розташовані в пазах циліндричної направляючої 12, виступають за її межі, дві пружини стиску 17, 18, встановлені по різні сторони від проміжної каретки 11 на циліндричній направляючій 12. Кожна із пружин стиску 17, 18 одним торцем упирається в штифт 16, а іншим в упор 19, 20 відповідно, з'єднаний з важелем механізму керування рукавичного автомата (на кресленні не показано). Принцип роботи привода полягає в наступному. В залежності від технологічних особливостей процесу в'язання виробів електродвигун має дві швидкості: першу - більшу та другу - меншу. При вмиканні електродвигуна 1 його обертання за допомогою пасових передач 2, 5 і редуктора 3 передається приводному валу 4, на якому закріплена ведуча зірочка 6. Обертання ведучої зірочки 6 приводить в рух ланцюг 8 і ведену зірочку 7. Жорстко закріплений на ланцюзі 8 повзун 9 за допомогою пальця 10 приводить в зворотно-поступальний рух проміжну карету 11, що рухається по циліндричній направляючій 12. Разом з проміжною кареткою 11 рухається з'єднана з нею в'язальна каретка 13, здійснюючи процес в'язання виробів. У момент переходу пальця із прямолінійної на криволінійну ділянку ланцюга 8, що характеризує сповільнення руху кареток, проміжна каретка вступає у взаємодію з одним із штифтів 16. Штифт 16, переміщаючись у пазу циліндричної направляючої 12, розтягує циліндричну пружину розтягу 15 й стискає одну із пружин стиску 17 або 18 (під час роботи рукавичного автомата в режимі першої швидкості), що опираються на упор 19 або 20 відповідно. При перемиканні електродвигуна на другу швидкість за допомогою важелів механізму керування (на кресленні не показано) обидва упори 19, 20 переміщуються в напрямку від проміжної каретки, виводячи із зони переміщення штифтів 16 пружини стиску 17, 18. Сила інерції, обумовлена сповільненням руху проміжної та в'язальної кареток, деформує пружину розтягу 15 і пружини стиску 17, 18 (при роботі рукавичного автомата в режимі першої швидкості) 1 UA 98535 U або лише циліндричну пружину розтягу 15 (при роботі в режимі другої швидкості), накопичуючи в них енергію. При виведенні кареток зі стану спокою й до моменту досягнення сталого режиму руху циліндрична пружина розтягу 15 та пружини стиску 17, 18 віддають накопичену енергію, переборюючи сили інерції розгону проміжної та в'язальної кареток. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково оснащений двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з можливістю взаємодії кожної циліндричної пружини стиску із проміжною кареткою в момент переходу проміжної каретки із прямолінійної ділянки ланцюгової передачі на криволінійну ділянку. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюPipa Borys Fedorovych, Muzychyshyn Serhii Volodymyrovych
Автори російськоюПипа Борис Федорович, Музычишин Сергей Владимирович
МПК / Мітки
МПК: D04B 15/96
Мітки: автомата, рукавичного, привід
Код посилання
<a href="https://ua.patents.su/4-98535-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата
Номер патенту: 98249
Опубліковано: 27.04.2015
Автори: Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: привід, рукавичного, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить зв'язані між собою електродвигун, ланцюгову передачу, що містить ведучу, ведену зірочки та ланцюг, проміжну та в'язальну каретки з напрямними, з'єднані між собою, та пружину розтягу, встановлену в напрямній проміжної каретки з можливістю взаємодії з нею, причому проміжна каретка з'єднана з ланцюгом та в'язальною кареткою послідовно, який відрізняється тим, що додатково обладнаний двома пружинами...
Привід в’язальної каретки рукавичного автомата
Номер патенту: 93984
Опубліковано: 27.10.2014
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: привід, в'язальної, каретки, рукавичного, автомата
Формула / Реферат:
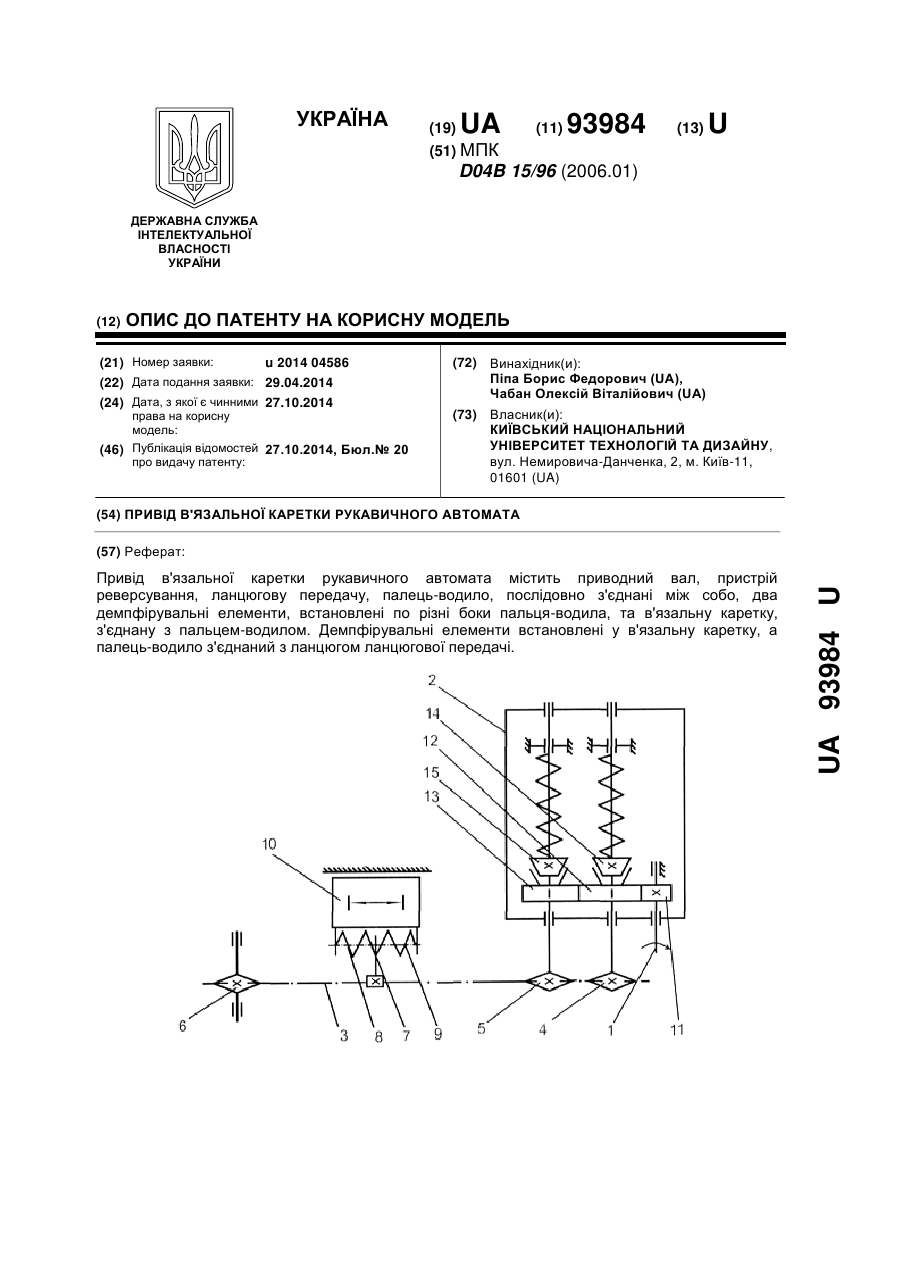
1. Привід в'язальної каретки рукавичного автомата, що містить приводний вал, пристрій реверсування, ланцюгову передачу, палець-водило, послідовно з'єднані між собою, два демпфірувальні елементи, встановлені по різні боки пальця-водила, та в'язальну каретку, з'єднану з пальцем-водилом, який відрізняється тим, що демпфірувальні елементи встановлені у в'язальну каретку, а палець-водило з'єднаний з ланцюгом ланцюгової передачі.2. Привід...
Привід рукавичного автомата
Номер патенту: 94303
Опубліковано: 10.11.2014
Автори: Чабан Віталій Васильович, Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/96, D04B 15/16
Мітки: автомата, рукавичного, привід
Формула / Реферат:
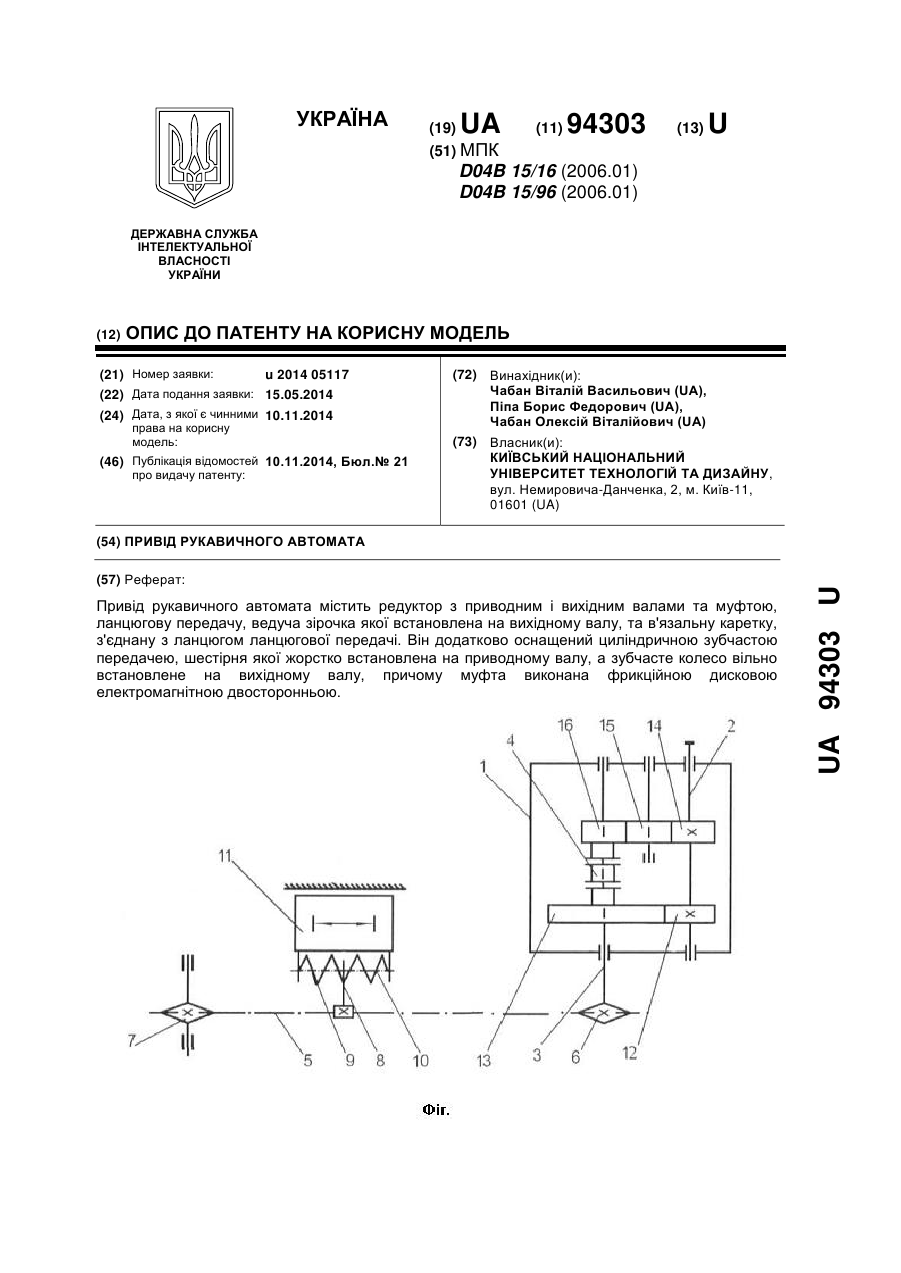
Привід рукавичного автомата, що містить редуктор з приводним і вихідним валами та муфтою, ланцюгову передачу, ведуча зірочка якої встановлена на вихідному валу, та в'язальну каретку, з'єднану з ланцюгом ланцюгової передачі, який відрізняється тим, що додатково оснащений циліндричною зубчастою передачею, шестірня якої жорстко встановлена на приводному валу, а зубчасте колесо вільно встановлене на вихідному валу, причому муфта виконана...
Привід рукавичного автомата
Номер патенту: 95880
Опубліковано: 12.01.2015
Автори: Музичишин Сергій Володимирович, Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/16
Мітки: рукавичного, автомата, привід
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, механічні передачі та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний обгінною муфтою та мотор-редуктором, розташованим співвісно з електродвигуном та з'єднаним з ним за допомогою обгінної муфти.
Привід рукавичного автомата

Номер патенту: 98327
Опубліковано: 27.04.2015
Автори: Павленко Георгій Іванович, Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16, D04B 15/94
Мітки: рукавичного, автомата, привід
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, встановленим на валу електродвигуна, який відрізняється тим, що додатково оснащений демпфіруючим пристроєм з пружними елементами, виконаними у вигляді радіальних пакетів плоских пружин, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом.
Попередній патент: Привід в’язальної машини
Наступний патент: Механізм накатування полотна круглов’язальної машини
Випадковий патент: Макаронні вироби