Вимірювач кутової швидкості
Номер патенту: 76302
Опубліковано: 25.12.2012
Автори: Воробйов Павло Андрійович, Гордін Олександр Григорович

Формула / Реферат
Вимірювач кутової швидкості, що містить електродвигун, на валу якого знаходиться плоский дископодібний ротор, який складається з окремих радіально розташованих сегментів, який відрізняється тим, що в вимірювач кутової швидкості введені чотири ємнісних диференційних датчики кутів відхилення сегментів ротора, чотири пристрої обробки інформації та обчислювальний пристрій, причому виходи кожного з датчиків кутів відхилення сегментів ротора зв'язані з входами відповідного пристрою обробки інформації, а виходи пристроїв обробки інформації подані на вхід обчислювального пристрою.
Текст
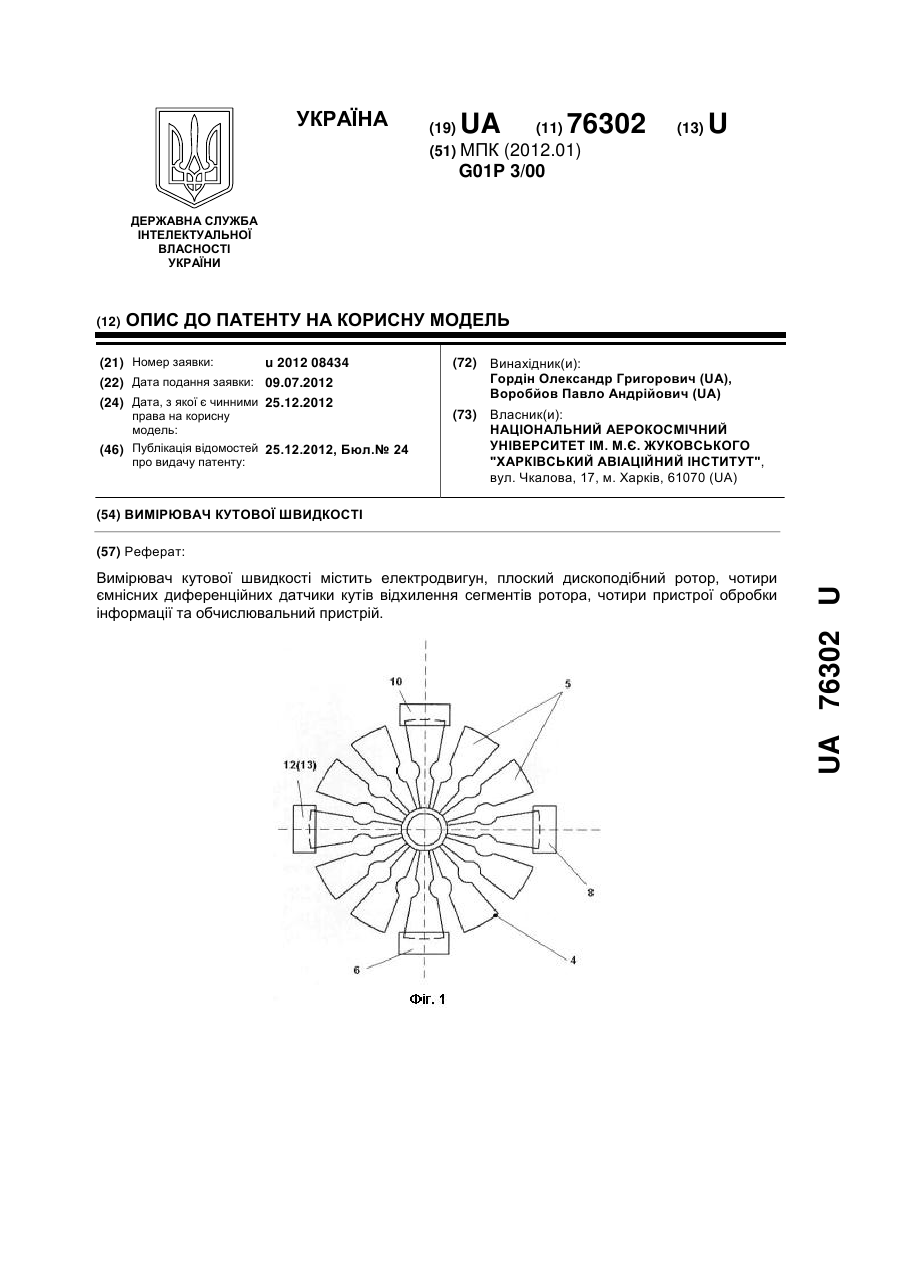
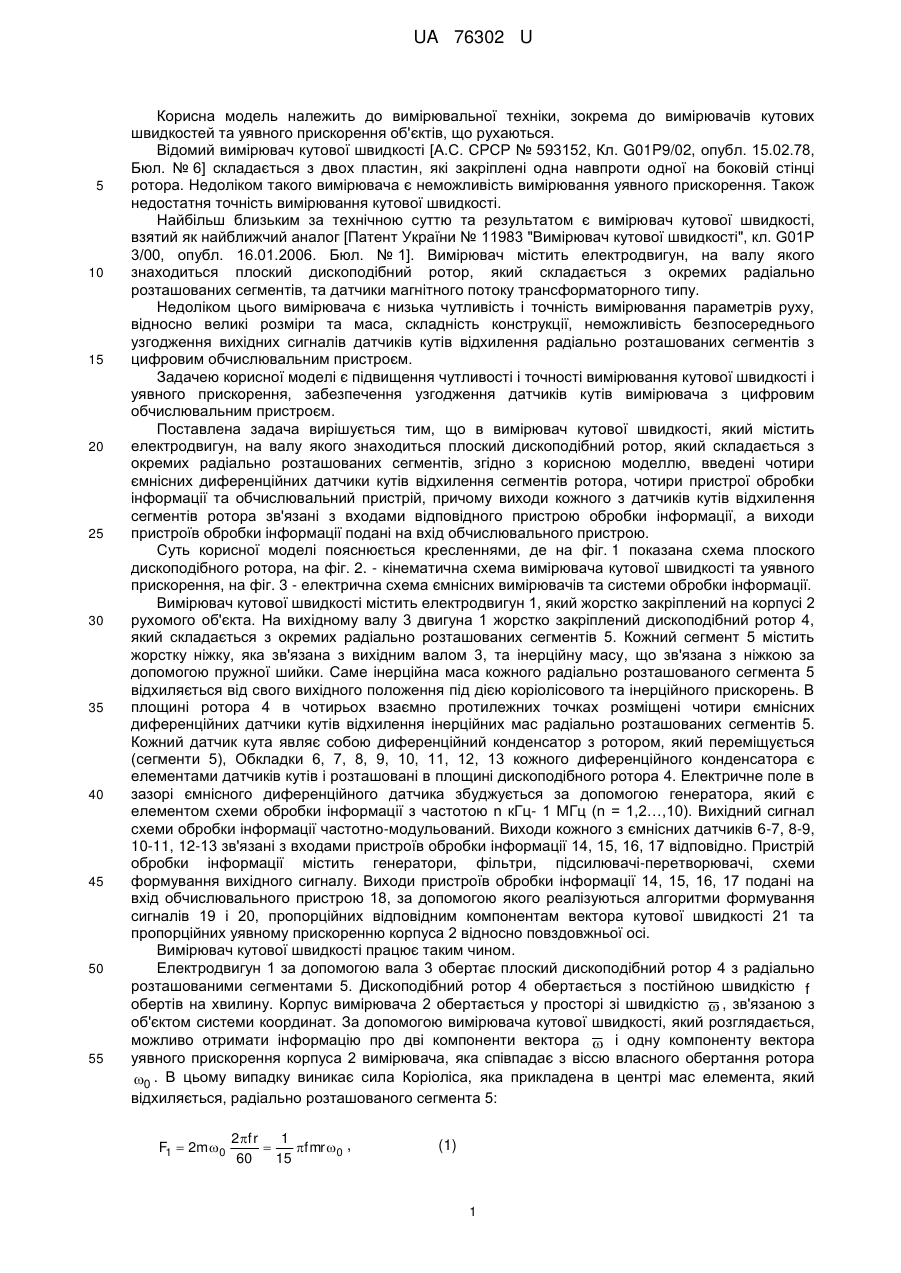
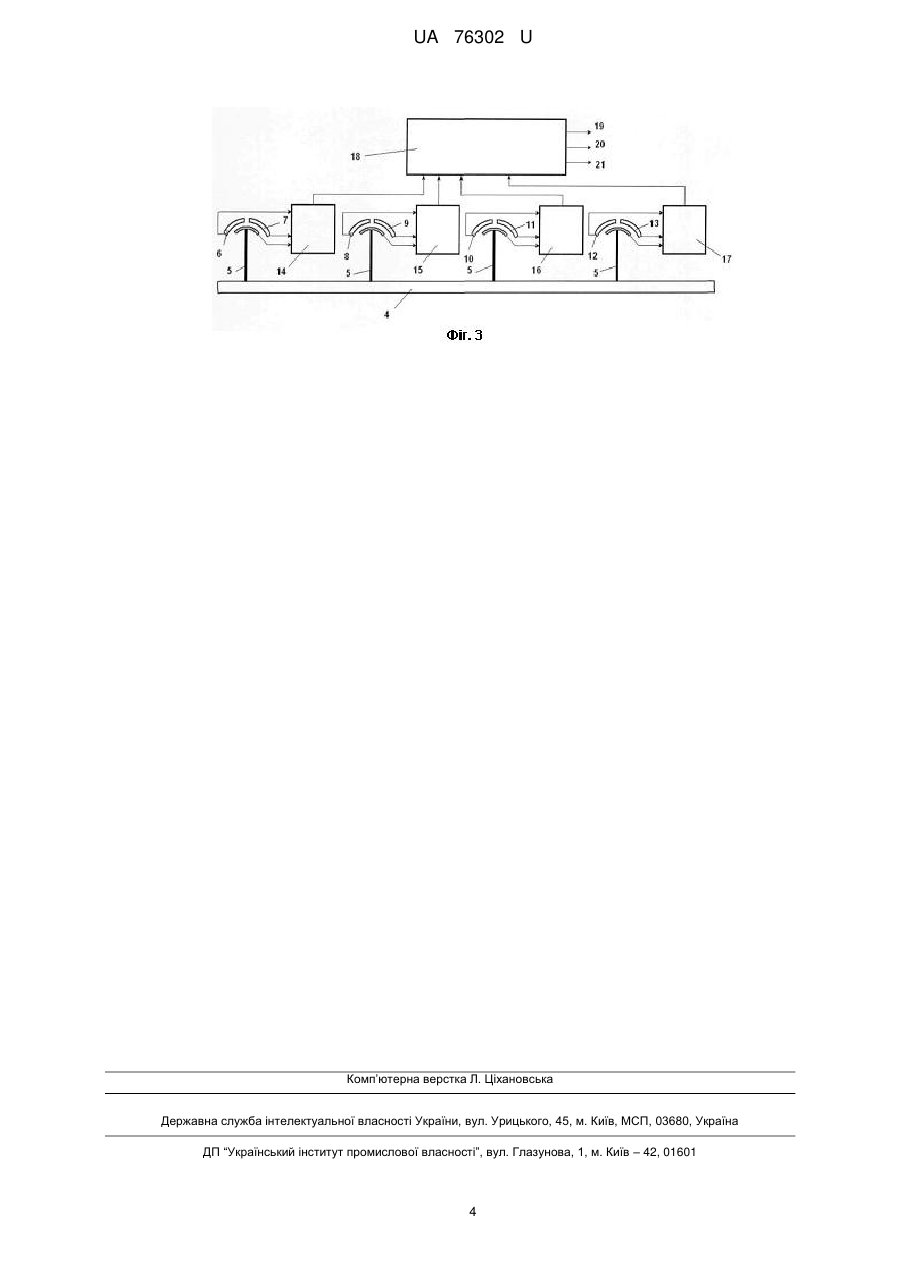
Реферат: UA 76302 U UA 76302 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки, зокрема до вимірювачів кутових швидкостей та уявного прискорення об'єктів, що рухаються. Відомий вимірювач кутової швидкості [А.С. СРСР № 593152, Кл. G01P9/02, опубл. 15.02.78, Бюл. № 6] складається з двох пластин, які закріплені одна навпроти одної на боковій стінці ротора. Недоліком такого вимірювача є неможливість вимірювання уявного прискорення. Також недостатня точність вимірювання кутової швидкості. Найбільш близьким за технічною суттю та результатом є вимірювач кутової швидкості, взятий як найближчий аналог [Патент України № 11983 "Вимірювач кутової швидкості", кл. G01P 3/00, опубл. 16.01.2006. Бюл. № 1]. Вимірювач містить електродвигун, на валу якого знаходиться плоский дископодібний ротор, який складається з окремих радіально розташованих сегментів, та датчики магнітного потоку трансформаторного типу. Недоліком цього вимірювача є низька чутливість і точність вимірювання параметрів руху, відносно великі розміри та маса, складність конструкції, неможливість безпосереднього узгодження вихідних сигналів датчиків кутів відхилення радіально розташованих сегментів з цифровим обчислювальним пристроєм. Задачею корисної моделі є підвищення чутливості і точності вимірювання кутової швидкості і уявного прискорення, забезпечення узгодження датчиків кутів вимірювача з цифровим обчислювальним пристроєм. Поставлена задача вирішується тим, що в вимірювач кутової швидкості, який містить електродвигун, на валу якого знаходиться плоский дископодібний ротор, який складається з окремих радіально розташованих сегментів, згідно з корисною моделлю, введені чотири ємнісних диференційних датчики кутів відхилення сегментів ротора, чотири пристрої обробки інформації та обчислювальний пристрій, причому виходи кожного з датчиків кутів відхилення сегментів ротора зв'язані з входами відповідного пристрою обробки інформації, а виходи пристроїв обробки інформації подані на вхід обчислювального пристрою. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показана схема плоского дископодібного ротора, на фіг. 2. - кінематична схема вимірювача кутової швидкості та уявного прискорення, на фіг. 3 - електрична схема ємнісних вимірювачів та системи обробки інформації. Вимірювач кутової швидкості містить електродвигун 1, який жорстко закріплений на корпусі 2 рухомого об'єкта. На вихідному валу 3 двигуна 1 жорстко закріплений дископодібний ротор 4, який складається з окремих радіально розташованих сегментів 5. Кожний сегмент 5 містить жорстку ніжку, яка зв'язана з вихідним валом 3, та інерційну масу, що зв'язана з ніжкою за допомогою пружної шийки. Саме інерційна маса кожного радіально розташованого сегмента 5 відхиляється від свого вихідного положення під дією коріолісового та інерційного прискорень. В площині ротора 4 в чотирьох взаємно протилежних точках розміщені чотири ємнісних диференційних датчики кутів відхилення інерційних мас радіально розташованих сегментів 5. Кожний датчик кута являє собою диференційний конденсатор з ротором, який переміщується (сегменти 5), Обкладки 6, 7, 8, 9, 10, 11, 12, 13 кожного диференційного конденсатора є елементами датчиків кутів і розташовані в площині дископодібного ротора 4. Електричне поле в зазорі ємнісного диференційного датчика збуджується за допомогою генератора, який є елементом схеми обробки інформації з частотою n кГц- 1 МГц (n = 1,2…,10). Вихідний сигнал схеми обробки інформації частотно-модульований. Виходи кожного з ємнісних датчиків 6-7, 8-9, 10-11, 12-13 зв'язані з входами пристроїв обробки інформації 14, 15, 16, 17 відповідно. Пристрій обробки інформації містить генератори, фільтри, підсилювачі-перетворювачі, схеми формування вихідного сигналу. Виходи пристроїв обробки інформації 14, 15, 16, 17 подані на вхід обчислювального пристрою 18, за допомогою якого реалізуються алгоритми формування сигналів 19 і 20, пропорційних відповідним компонентам вектора кутової швидкості 21 та пропорційних уявному прискоренню корпуса 2 відносно повздовжньої осі. Вимірювач кутової швидкості працює таким чином. Електродвигун 1 за допомогою вала 3 обертає плоский дископодібний ротор 4 з радіально розташованими сегментами 5. Дископодібний ротор 4 обертається з постійною швидкістю f обертів на хвилину. Корпус вимірювача 2 обертається у просторі зі швидкістю , зв'язаною з об'єктом системи координат. За допомогою вимірювача кутової швидкості, який розглядається, можливо отримати інформацію про дві компоненти вектора і одну компоненту вектора уявного прискорення корпуса 2 вимірювача, яка співпадає з віссю власного обертання ротора 0 . В цьому випадку виникає сила Коріоліса, яка прикладена в центрі мас елемента, який відхиляється, радіально розташованого сегмента 5: F1 2m0 2fr 1 fmr 0 , 60 15 (1) 1 UA 76302 U 5 де m - маса елемента, який відхиляється, r - відстань між центром мас елемента 5, який відхиляється, і віссю власного обертання ротора. Під дією цієї сили відхиляється елемент 5 дископодібного ротора 4 у відповідній фазі його обертання. При наявності прискорення корпуса 2 вимірювача в центрі мас елемента, який відхиляється, радіально розташованого сегмента 5 прикладена сила: F2 mW , 10 (2) де W - проекція вектора уявного прискорення корпуса 2 вимірювача на вісь власного обертання ротора 4. Таким чином, кожний елемент радіально розташованих сегментів 5 дископодібного ротора 4 відхиляється відносно його початкового стану. Відхилення елемента радіально розташованих сегментів 5 відбувається в протилежних фазах його обертання під дією сумарних сил: 15 F1 F2 1 fmr 0 mW , 15 F1 F2 20 1 fmr 0 mW , 15 (3) (4) Використання обчислювального пристрою 18 в системі обробки інформації дозволяє відповідно до співвідношень (3) і (4) визначити параметри 0 і W . Відхилення кожного елемента радіально розташованих сегментів 5 ротора 4 в чотирьох точках фіксуються чотирма ємнісними диференційними датчиками 6-7, 8-9, 10-11, 12-13. Кути відхилення елементів радіально розташованих сегментів 5 ротора 4 пропорційні силам (3) і (4): 1 K( 1 fmr 0 mW ) ; 15 (5) 25 2 K( 30 1 fmr 0 mW ) , 15 де K - коефіцієнт, який визначається фізичними параметрами елементів дископодібного ротора. За допомогою ємнісних диференційних датчиків 6-7, 8-9, 10-11, 12-13 формуються електричні сигнали, пропорційні кутам відхилення елементів радіально розташованих сегментів 5 ротора 4: f1 1; f2 2 , 35 (6) (7) де - коефіцієнт перетворення кутів відхилення елементів в частоту вихідних сигналів ємнісних датчиків. Так 1 1 f1 f2 1 2 K fmr 0 mW mW fmr 0 2KmW ; 15 15 1 1 2K f1 f2 1 2 K fmr 0 mW mW fmr 0 fmr 0 . 15 15 15 40 (8) (9) Відповідно до цих співвідношень за допомогою обчислювального пристрою 18 можна отримати параметри 0 і W . 2 UA 76302 U Таким чином, запропонована корисна модель дозволяє підвищити чутливість і точність вимірювання кутової швидкості і уявного прискорення, забезпечити узгодження датчиків кутів вимірювача з цифровим обчислювальним пристроєм. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Вимірювач кутової швидкості, що містить електродвигун, на валу якого знаходиться плоский дископодібний ротор, який складається з окремих радіально розташованих сегментів, який відрізняється тим, що в вимірювач кутової швидкості введені чотири ємнісних диференційних датчики кутів відхилення сегментів ротора, чотири пристрої обробки інформації та обчислювальний пристрій, причому виходи кожного з датчиків кутів відхилення сегментів ротора зв'язані з входами відповідного пристрою обробки інформації, а виходи пристроїв обробки інформації подані на вхід обчислювального пристрою. 3 UA 76302 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular velocity measuring device
Автори англійськоюHordin Oleksandr Hryhorovych, Vorobiov Pavlo Andriiovych
Назва патенту російськоюИзмеритель угловой скорости
Автори російськоюГордин Александр Григорьевич, Воробьев Павел Андреевич
МПК / Мітки
МПК: G01P 3/00
Мітки: швидкості, кутової, вимірювач
Код посилання
<a href="https://ua.patents.su/6-76302-vimiryuvach-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Вимірювач кутової швидкості</a>
Вимірювач кутової швидкості

Номер патенту: 11983
Опубліковано: 16.01.2006
Автори: Гордін Олександр Григорович, Зінченко Юрій Володимирович
МПК: G01P 3/00, G01P 3/64, G01R 33/02
Мітки: вимірювач, швидкості, кутової
Формула / Реферат:
1. Вимірювач кутової швидкості, який містить датчики переміщення та електродвигун, на валу якого знаходиться плоский дископодібний ротор, який відрізняється тим, що плоский дископодібний ротор складається з окремих радіально розташованих сегментів.2. Вимірювач кутової швидкості за п. 1, який відрізняється тим, що як датчики переміщення використано датчики магнітного потоку трансформаторного типу.
Трикомпонентний вимірювач кутової швидкості
Номер патенту: 55300
Опубліковано: 15.03.2005
Автори: Бандура Іван Миколайович, Кулік Анатолій Степанович, Симонов Володимир Федорович, Субота Анатолій Максимович
МПК: G01P 9/00
Мітки: вимірювач, трикомпонентний, швидкості, кутової
Формула / Реферат:
1. Фруктовий наповнювач, який містить пюре плодово-ягідне або подрібнені шматочки плодів чи ягід, цукор, лимонну кислоту, желеутворюючий компонент, який відрізняється тим, що додатково містить цитрат натрію і воду, а як желеутворюючий компонент містить модифікований крохмаль при такому співвідношенні інгредієнтів в кг на 1000 кг продукту: пюре плодово-ягідне або подрібнені шматочки плодів чи ягід 290,0 -...
Цифровий вимірювач кутової швидкості
Номер патенту: 95149
Опубліковано: 11.07.2011
Автори: Кондратов Владислав Тимофійович, Сенчевська Наталія Вікторівна
МПК: G01C 19/72
Мітки: кутової, швидкості, цифровий, вимірювач
Формула / Реферат:
Цифровий вимірювач кутової швидкості, що включає мікроконтролер, оперативний запам'ятовуючий пристрій та постійний запам'ятовуючий пристрій, які через загальну шину з'єднані з портом С мікроконтролера, порт Е якого підключений до цифрового відлікового пристрою, а також оптично з'єднані між собою джерело оптичного випромінювання, першу світлоподільну пластину, поляризатор, другу світлоподільну пластину, фокусуючу лінзу, дев'яностоградусний...
Датчик кутової швидкості на базі динамічно налагоджуваного гіроскопу з оптичним датчиком кута
Номер патенту: 71782
Опубліковано: 25.07.2012
Автори: Аврутов Вадим Вікторович, Симоненко Владислав Миколайович
МПК: G01C 19/38
Мітки: датчик, кутової, датчиком, базі, оптичним, швидкості, налагоджуваного, гіроскопу, динамічної, кута
Формула / Реферат:
Датчик кутової швидкості, який використовується в інерціальних навігаційних системах, що містить динамічно налаштовуваний гіроскоп, який відрізняється тим, що знімання інформації про кути повороту ротора навкруг осей торсіонів здійснюється за допомогою оптичного, а не ємнісного датчика кута.
Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості
Номер патенту: 74397
Опубліковано: 25.10.2012
Автори: Мелешко Владислав Валентинович, Нужний Олександр Володимирович
МПК: G01C 21/00
Мітки: спосіб, сигналу, датчика, гірокомпасування, гіроскопічного, швидкості, кутової
Формула / Реферат:
Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості, який полягає в тому, що сигнал гіроскопічного датчика кутової швидкості, встановленого на гіроплатформі, надходить на обчислювальний блок, де формується момент корекції, що подається на двигун стабілізації, який повертає платформу, доки вимірювана гіроскопічним датчиком кутової швидкості східна складова швидкості обертання Землі не стане рівною нулю; корекція...
Попередній патент: Спосіб вимірювання потужності експозиційної дози електромагнітного випромінювання
Наступний патент: Спосіб катетеризації артерії для проведення регіональної хіміотерапії при раку нижньої третини шлунка
Випадковий патент: Спосіб одержання спиртових бражок із крохмалевмісної сировини