Система для вимірювання параметрів руху рухомих об’єктів
Номер патенту: 106039
Опубліковано: 11.04.2016
Автори: Коробко Андрій Іванович, Абрамов Дмитрій Володимирович, Тарасов Юрій Володимирович, Власюк Петро Степанович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Подригало Михайло Абович
Формула / Реферат
Система для вимірювання параметрів руху рухомих об'єктів, що складається з елементів вимірювання та пристроїв обробляння і візуалізації інформації, яка відрізняється тим, що вимірювання параметрів руху (лінійного прискорення, лінійної швидкості, кутового прискорення, кутової швидкості, миттєвого радіусу повороту, напряму вектору лінійної швидкості) здійснюють одночасно давачем лінійних прискорень і давачем кутової швидкості (гіроскопом), виконаними в одному блоці, інформація про параметри руху об'єктів одержують шляхом математичної обробки сигналів, отриманих з давачів.
Текст
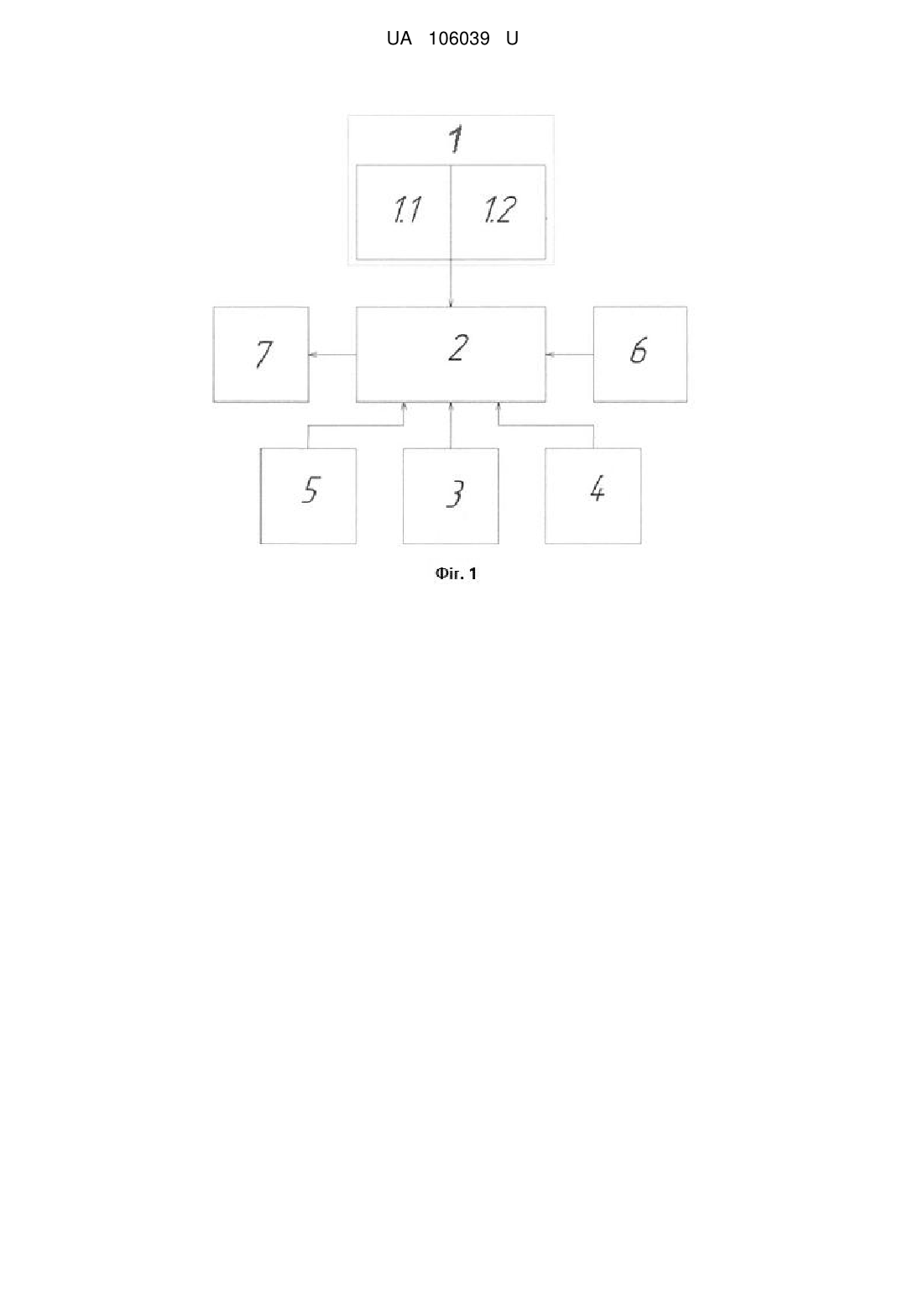
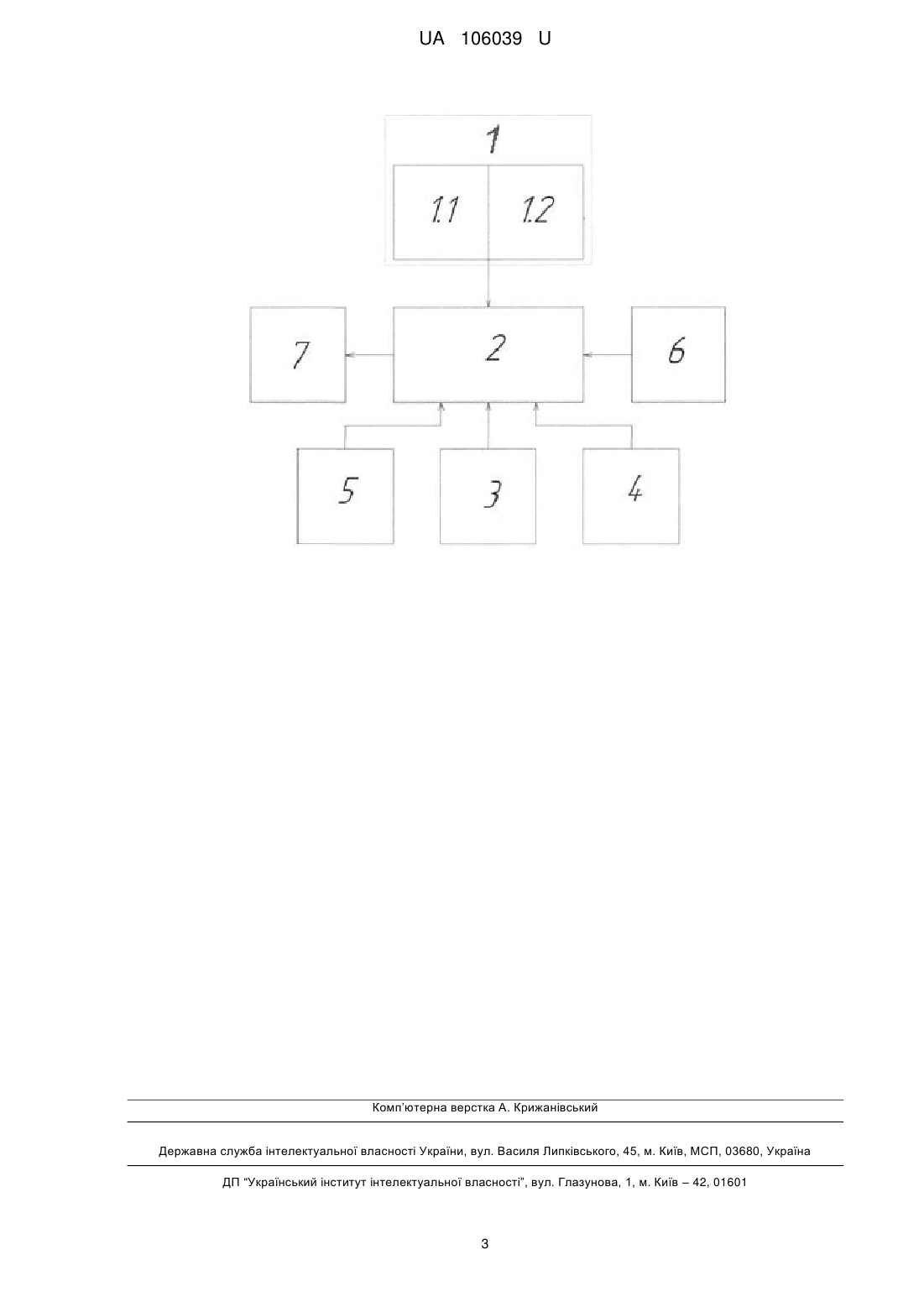
Реферат: Система для вимірювання параметрів руху рухомих об'єктів складається з елементів вимірювання та пристроїв обробляння і візуалізації інформації. Вимірювання параметрів руху (лінійного прискорення, лінійної швидкості, кутового прискорення, кутової швидкості, миттєвого радіуса повороту, напряму вектора лінійної швидкості) здійснюють одночасно давачем лінійних прискорень і давачем кутової швидкості (гіроскопом), виконаними в одному блоці. Інформація про параметри руху об'єктів одержуються шляхом математичної обробки сигналів, отриманих з давачів. UA 106039 U (12) UA 106039 U UA 106039 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі вимірювальної техніки і може бути використана для зменшення похибки вимірювання параметрів руху (лінійного прискорення, лінійної швидкості, кутового прискорення, кутової швидкості, миттєвого радіусу повороту, напряму вектору лінійної швидкості) рухомих об'єктів при випробуваннях і в системах навігації при визначенні просторово-часової орієнтації об'єктів та при управлінні рухомим об'єктом. Відомим аналогом є система для вимірювання швидкості об'єкту, що містить в собі вимірювальний провідник, розташований в горизонтальному напряму, перпендикулярному напряму руху об'єкту, з можливістю впливу на цей провідник магнітного поля Землі, і бортовий обчислювач, виконаний з можливістю визначення швидкості руху об'єкту в залежності від різниці електричного потенціалу між різними точками вимірювального провідника, додатково може бути встановлений давач магнітного поля і інклінометр або акселерометр [RU 2307356 Устройство для измерения скорости объекта, МПК G01P3/50 / Коровин В. А., Коровин В. К.; Патентообладатель: ООО "Научно-производственное предприятие "Резонанс" RU.; 2006104665/28, Дата подачи заявки: 14.02.2006; Опубликовано: 27.09.2007, Бюл. № 27]. Недоліком цієї вимірювальної системи є понижена точність вимірювання, відсутність універсальності в застосуванні і підвищена складність встановлення на об'єкті внаслідок необхідності обладнання спеціальних посадочних місць під різні давачі та неможливість визначення напряму вектору швидкості. Відомим аналогом є також спосіб визначення швидкості руху наземного транспортного засобу, що полягає в тому, що при використанні двох вимірювачів швидкості (основного і додаткового) здійснюють безперервне вимірювання швидкості руху об'єкта основним і періодичні вимірювання з високою точністю додатковим вимірювачем, використовуючи вимірювання часу затримки сигналу другого каналу щодо першого високоточним вимірювачем в певних межах часових інтервалів, попередньо обумовлених менш точним вимірювачем швидкості [RU 2431847 Способ определения скорости движения наземного транспортного средства, МПК G01P3/50 / Кулешов В. В., Макаров В. А., Кутузов С. В.; Патентообладатель: Федеральное государственное образовательное учреждение высшего профессионального образования. Военная академия Ракетных войск стратегического назначения имени Петра Великого МО РФ (RU).-2010101941/28, Дата подачи заявки: 22.01.2010; Опубликовано: 20.10.2011, Бюл. № 29]. Недоліком аналога є неможливість визначення напряму вектору швидкості, що потребує застосування додаткових приладів і відповідно обмежує універсальність в застосуванні. Найближчим аналогом до корисної моделі є система для визначення параметрів руху автотранспортних засобів при динамічних (кваліметричних) випробуваннях, в якій для вимірювання параметрів руху, в тому числі і швидкості руху, використовують два трикоординатні давачі лінійного прискорення [Патент України № 51031, МПК G 01 Р 3/00. G 01 Р 15/00. Система для визначення параметрів руху автотранспортних засобів при динамічних (кваліметричних) випробуваннях / Подригало М. А., Коробко А. І., Клец Д. М., Файст В. Л.; заявник Харківський національний автомобільно-дорожній університет. - № u201001136; заявл. 04.02.10; опубл. 25.06.10, Бюл. № 12.]. У такій вимірювальній системі для вимірювання параметрів руху транспортного засобу при динамічних випробуваннях, що складаються з елементів вимірювання та пристроїв обробки та візуалізації інформації, вимірювання параметрів руху здійснюється одночасно двома давачами лінійних прискорень. Інформація про параметри руху транспортного засобу одержується шляхом математичної обробки сигналів з давачів прискорень. Інформація про швидкість руху транспортного засобу одержується шляхом математичної обробки без застосування інтегрування сигналів з давачів прискорень. Найближчий аналог має недоліки, оскільки на результат вимірювання значно впливають подовжній і поперечний ухили поверхні, по якій рухається транспортний засіб, що вимагає застосування складних способів коригування похибки вимірювання і застосування додаткових технічних засобів. Необхідність їх застосування підвищує трудові і матеріальні затрати. В основу корисної моделі поставлена задача автономності і зменшення похибки вимірювання параметрів руху (лінійного прискорення, лінійної швидкості, кутового прискорення, кутової швидкості, миттєвого радіусу повороту, напряму вектору лінійної швидкості) рухомих об'єктів при випробуваннях та підвищення функціональності навігаційних систем при визначенні просторово-часової орієнтації об'єктів і при управлінні рухомими об'єктами, шляхом зміни складу інформаційного обладнання і спрощення непрямих вимірювань. Поставлена задача вирішується тим, що у системі для вимірювання параметрів руху рухомих об'єктів, що складається з елементів вимірювання та пристроїв обробки та візуалізації інформації, згідно з корисною моделлю, вимірювання параметрів руху здійснюють одночасно давачами лінійних прискорень і кутової швидкості (гіроскопом), виконаних в одному блоці, 1 UA 106039 U 5 10 15 20 25 30 35 інформація про параметри руху об'єктів одержується шляхом математичної обробки сигналів з давачів. Вимірювання параметрів руху здійснюють одночасно в у повздовжній, поперечній і вертикальній площинах. Корисна модель пояснюється кресленням, де приведена структурна схема системи для вимірювання параметрів руху об'єктів, 1 - вимірювальний блок, 2 - обчислювальний блок, 3 пристрій візуалізації, 4 - клавіатура, 5 - друкувальний пристрій, 6 - блок живлення, 7 - модуль підключення до об'єкту. Вимірювальний блок 1 складається з давача лінійного прискорення 1.1 і давача кутової швидкості 1.2. Вимірювальний блок 1 через канали зв'язку з'єднаний з обчислювальним блоком 2, до якого за допомогою відповідних портів можна підключати зовнішні накопичувані інформації, периферійні пристрої (наприклад, візуалізатор інформації 3, клавіатура 4, пристрій для роздрукування даних 5). Живлення обчислювального блоку 2 забезпечується від бортової електромережі об'єкту або від автономних елементів живлення за допомогою блоку живлення 6. Обчислювальний блок має модуль підключення до рухомого об'єкту 7, через який на об'єкт передається інформація управління ним в залежності від інформації отриманої вимірювальним блоком (зворотній зв'язок). Корисна модель працює наступним чином. На подовжню вісь об'єкту встановлюється вимірювальний блок 1, що одночасно реєструє лінійні прискорення і кутові швидкості у поздовжній, поперечній та вертикальній площинах. Після реєстрації даних відбувається їх попереднє обробляння шляхом фільтрування, усереднення і синхронізації по величині вибраного оператором інтервалу часу. Сигнали з давачів після попереднього обробляння у вигляді цифрового коду поступають в обчислювальний блок 2, де вони обробляються за допомогою спеціальної програми. Під час цього обробляння одержується інформація про лінійні прискорення і кутові швидкості шляхом прямих вимірювань і інформація про кутові прискорення, миттєвий радіус повороту і лінійну швидкість непрямими вимірюваннями та напрям вектору лінійної швидкості. Одержана інформація про результати параметрів руху рухомого об'єкту відображається на пристрої візуалізації 3 у графічній або цифровій формі, реєструється на накопичувачах інформації і використовується для прийняття рішення про результати випробувань, оцінювання поточного стану рухомого об'єкту або прийняття рішення про керуючу дію для об'єкту випробувань. Запропонована вимірювальна система дозволяє зменшити неадекватність моделі вимірювання, підвищити автономність і універсальність та зменшити похибку вимірювання параметрів руху рухомих об'єктів при випробуваннях і в системах навігації при визначенні просторово-часової орієнтації об'єктів та при управлінні ними, за рахунок зміни складу інформаційного обладнання і спрощення непрямих вимірювань. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Система для вимірювання параметрів руху рухомих об'єктів, що складається з елементів вимірювання та пристроїв обробляння і візуалізації інформації, яка відрізняється тим, що вимірювання параметрів руху (лінійного прискорення, лінійної швидкості, кутового прискорення, кутової швидкості, миттєвого радіуса повороту, напряму вектора лінійної швидкості) здійснюють одночасно давачем лінійних прискорень і давачем кутової швидкості (гіроскопом), виконаними в одному блоці, інформація про параметри руху об'єктів одержують шляхом математичної обробки сигналів, отриманих з давачів. 2 UA 106039 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measuring motion parameters of movable objects
Автори англійськоюPodryhalo Mykhailo Abovych, Abramov Dmytro Volodymyrovych, Tarasov Yurii Volodymyrovych, Korobko Andrii Ivanovych, Oliiarnyk Bohdan Oleksiiovych, Vlasiuk Petro Stepanovych
Назва патенту російськоюСистема для измерения параметров движения движущихся объектов
Автори російськоюПодригало Михаил Абович, Абрамов Дмитрий Владимирович, Тарасов Юрий Владимирович, Коробко Андрей Иванович, Олиярнык Богдан Алексеевич, Власюк Петр Степанович
МПК / Мітки
МПК: G01P 15/00, G01P 3/00
Мітки: система, об'єктів, рухомих, параметрів, вимірювання, руху
Код посилання
<a href="https://ua.patents.su/5-106039-sistema-dlya-vimiryuvannya-parametriv-rukhu-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система для вимірювання параметрів руху рухомих об’єктів</a>
Система для визначення параметрів руху автотранспортних засобів при динамічних (кваліметричних) випробуваннях
Номер патенту: 51031
Опубліковано: 25.06.2010
Автори: Клец Дмитро Михайлович, Подригало Михайло Абович, Файст Валерій Львович, Коробко Андрій Іванович
МПК: G01P 3/00, G01P 15/00
Мітки: кваліметричних, параметрів, визначення, автотранспортних, засобів, динамічних, руху, система, випробуваннях
Формула / Реферат:
Система для визначення параметрів руху автотранспортних засобів (АТЗ) при динамічних (кваліметричних) випробуваннях, що складається з елементів вимірювання та пристроїв обробки та візуалізації інформації, яка відрізняється тим, що визначення параметрів руху здійснюють одночасно двома датчиками прискорень, причому датчики прискорень вимірюють прискорення АТЗ у повздовжній, поперечній та вертикальній площинах, інформацію про параметри руху АТЗ...
Пристрій для вимірювання параметрів руху об’єктів
Номер патенту: 103422
Опубліковано: 10.10.2013
Автори: Шаповалова Оксана Олександрівна, Подчашинський Юрій Олександрович
Мітки: вимірювання, об'єктів, руху, пристрій, параметрів
Формула / Реферат:
Пристрій для вимірювання параметрів руху об'єктів, що містить пристрій (3) формування відеозображень, вхід якого оптично пов'язаний з об'єктом (1) вимірювань, а вихід підключено до входу аналого-цифрового перетворювача (13), блок (9) обчислення переміщень, перший (12) та другий (11) суматори, який відрізняється тим, що додатково введено акселерометр (2), жорстко закріплений на об'єкті (1) вимірювань, блок (14) пам'яті, блок (6) визначення...
Пристрій для вимірювання і реєстрації параметрів поступального та обертального руху об’єктів досліджень
Номер патенту: 82869
Опубліковано: 26.05.2008
Автори: Подчашинський Юрій Олександрович, Грабар Іван Григорович, Гніліцький Віталій Васильович
МПК: G01B 7/00
Мітки: вимірювання, параметрів, об'єктів, обертального, реєстрації, руху, досліджень, пристрій, поступального
Формула / Реферат:
Пристрій для вимірювання і реєстрації параметрів поступального та обертального руху об'єктів досліджень, що містить датчики (1) руху та електронну обчислювальну машину (3) з паралельним інтерфейсом (4) передачі цифрових даних, який відрізняється тим, що кожен з датчиків (1) руху має вихід у вигляді одного розряду двійкового цифрового коду, який підключений безпосередньо до відповідного входу паралельного інтерфейсу (4) передачі цифрових...
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів
Номер патенту: 65099
Опубліковано: 15.03.2004
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: модернізований, літальних, параметрів, вимірювання, частотно-часовий, метод, апаратів, руху
Формула / Реферат:
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який полягає у тому, що на передавальному боці шестипараметрійної лазерної вимірювальної системи (ЛВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяють необхідні пари частот для створення рівносигнального напрямку (РСН) у вигляді 4-х, які частково перетинаються, парціальних...
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата
Номер патенту: 61315
Опубліковано: 11.07.2011
Автори: Фриз Сергій Петрович, Парфенюк Василь Григорович, Петрожалко Володимир Володимирович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: параметрів, спосіб, руху, апарата, перевірки, вірогідності, космічного, вимірювання
Формула / Реферат:
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата, який полягає в тому, що в обчислювальній машині бортового комплексу керування дані з апаратури супутникової навігації (координати та швидкості) переводяться у Кеплерові елементи орбіти та порівнюються із прогнозованими...
Попередній патент: Спосіб виробництва розсолу для варено-копчених продуктів із м’яса птиці
Наступний патент: Набір засобів для дитячого харчування
Випадковий патент: Спосіб розігріву реактора з шаром каталізатора