Регулятор з динамічним коректором для об’єктів з часовою затримкою
Номер патенту: 107383
Опубліковано: 10.06.2016
Автори: Новіков Павло Валерійович, Бунке Олександр Сергійович, Ковриго Юрій Михайлович
Формула / Реферат
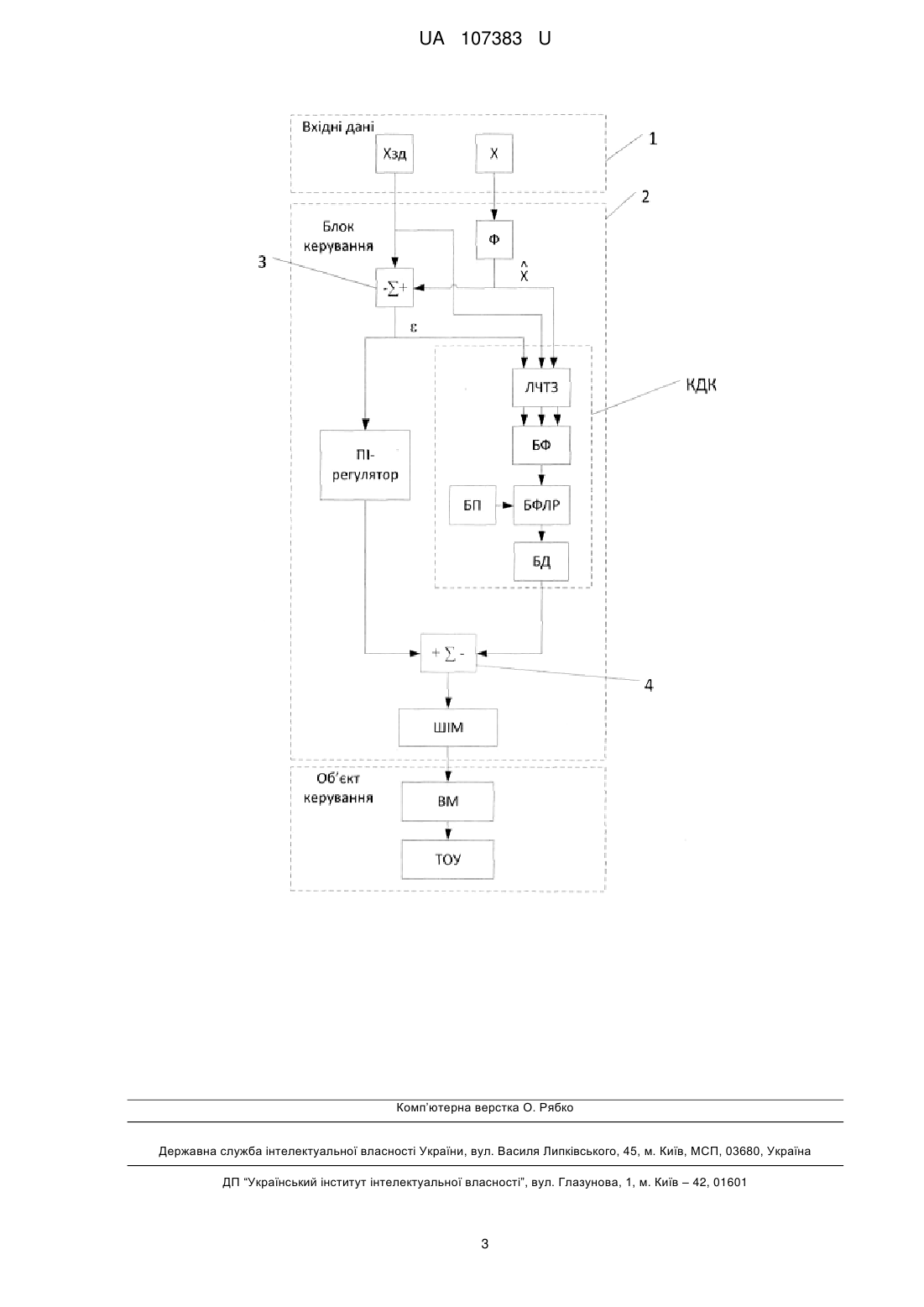
Регулятор з динамічним коректором для об'єктів з часовою затримкою, що містить блок вхідних сигналів, фільтр вхідних сигналів, пропорційно-інтегральний регулятор, блок динамічної корекції вихідного сигналу, блок часової затримки, широтно-імпульсний модулятор, який відрізняється тим, що блок динамічної корекції містить блок фазування вхідних сигналів, базу правил, блок прийняття логічного рішення і блок дефазування вихідних сигналів, формуючи таким чином корегувальний сигнал на базі нечіткої логіки.
Текст
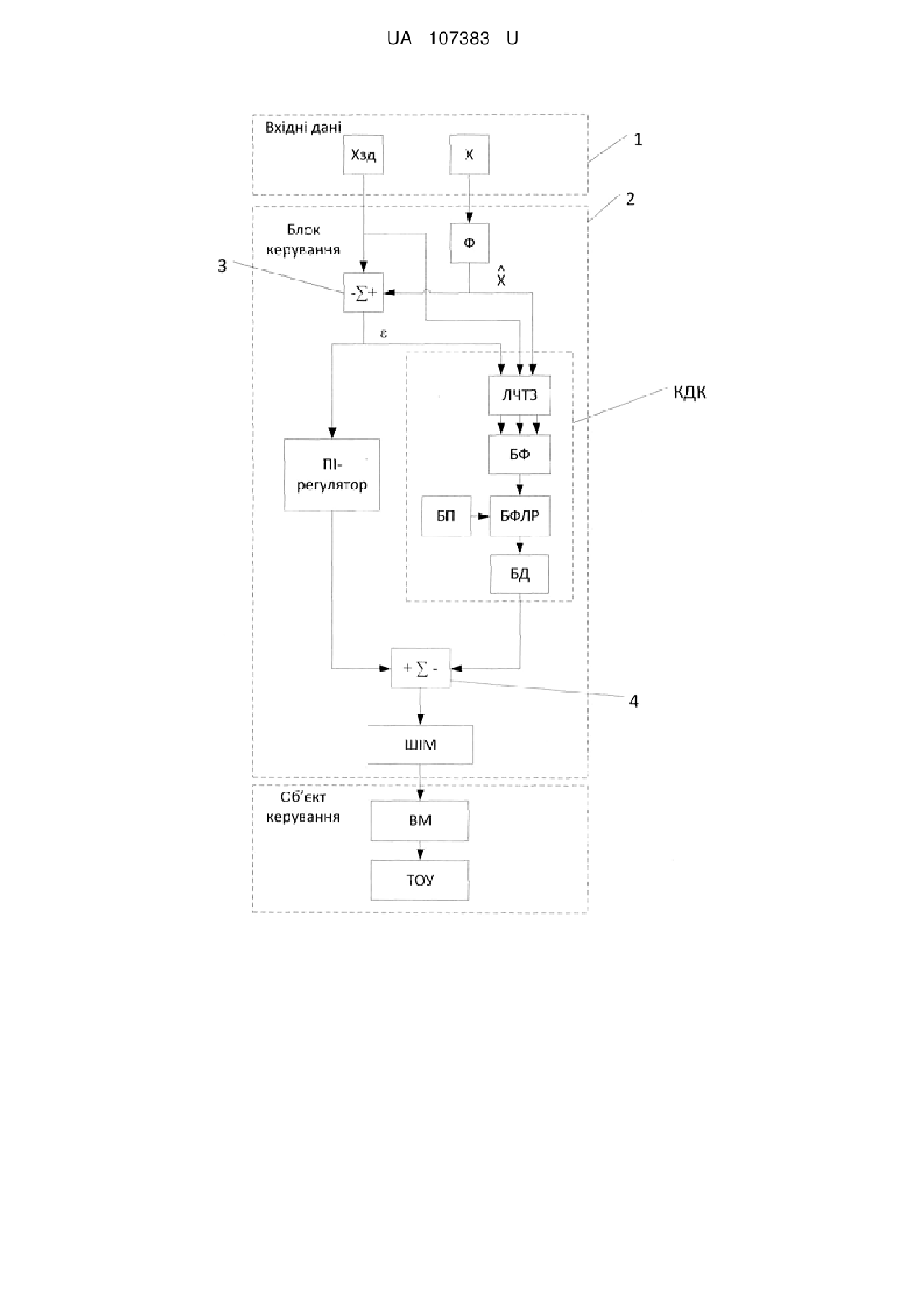
Реферат: UA 107383 U UA 107383 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до використання в системах автоматизації інерційних об'єктів з часовою затримкою, динамічні властивості яких характеризуються нелінійністю і нестабільністю динамічних характеристик. Такі об'єкти характерні для енергетичної, хімічної, металургійної, нафтопереробної, будівельної, харчової та інших галузей промисловості. Відомий пропорційно-інтегрально-диференційний (ПІД) регулятор, який містить паралельно з'єднані пропорційну ланку, інтегральну ланку та диференційну ланку. ПІД-регулятор подає вихідний сигнал, що є сумою трьох складових: пропорційного регулювання, регулювання по інтегралу і регулювання по похідній. Перша ланка пропорційна помилці вихідної величини, друга ланка - інтегралу по часу помилки вихідної величини, а третя ланка - похідній помилки. Недоліком цього способу є те, що на промислових об'єктах використання диференційної ланки ускладнюється тим, що інформаційні сигнали носять стохастичний характер і є спотвореними електромагнітними завадами. Для усунення цих проблем використовують фільтри, при цьому застосування диференційної ланки стає неефективним та обмежує якість регулювання [1]. Найбільш близьким аналогом є "Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням". Цей спосіб включає регулювання параметрів на початковій стадії перехідного процесу за стандартним пропорційно-інтегральним (ПІ) законом і додатково включає корекцію надлишкового керуючого впливу регулювання на завершальній стадії перехідного процесу [2]. Недоліком цього способу є те, що він реалізований на базі лінійної теорії автоматичного управління, тоді як багато промислових технологічних установок в дійсності з точки зору теорії автоматичного управління є нелінійними і нестаціонарними об'єктами. Крім того, закони регулювання на базі лінійної теорії автоматичного управління не задовольняють вимогам якості регулювання в широкому діапазоні режимів роботи об'єктів. Для застосування більш складних алгоритмів керування часто не вистачає інформації про об'єкт керування і його надійного математичного опису. Цим пояснюється той факт, що деякі складні технологічні установки, такі як парові котлоагрегати великої потужності, керуються досвідченим оператором в ручному режимі. Задачею корисної моделі є забезпечення потрібного запасу стійкості функціонування нелінійних інерційних об'єктів з часовою затримкою, а також підтримання високої якості перехідних процесів у всьому діапазоні режимів роботи обладнання в умовах нестабільності динамічних характеристик регульованих об'єктів. Поставлена задача вирішується регулятором з динамічним коректором для об'єктів з часовою затримкою, що містить блок вхідних сигналів, фільтр вхідних сигналів, ПІ-регулятор, блок динамічної корекції вихідного сигналу, блок часової затримки, широтно-імпульсний модулятор. Згідно з корисною моделлю, блок динамічної корекції містить блок фазування вхідних сигналів, базу правил, блок прийняття логічного рішення і блок дефазування вихідних сигналів. За допомогою цих блоків корегувальний сигнал формується на базі нечіткої логіки. Запропонована корисна модель розширює алгоритмічні можливості способу регулювання інерційних параметрів з використанням нечіткої логіки, що дає можливість програмно реалізувати алгоритм керування, близький до алгоритму керування оператора. Регулятор може бути здійснений за допомогою системи автоматичного керування, блоксхема якої зображена на кресленні. Регулятор містить пристрій введення вхідних сигналів 1, де: X - значення параметра технологічного процесу; ˆ X - відфільтроване значення X ; ˆ - сигнал неузгодженості між X та завданням X зд . 50 55 Вхідні сигнали перетворюються в аналогово-цифровому перетворювачі (на схемі не показано) в цифрові еквіваленти. Фільтр Φ призначений для усунення електромагнітних завад, недостовірних даних та попередньої обробки даних. В блоці керування 2 реалізована двоканальна схема регулювання з ПІ-регулятором і каналом динамічної корекції (КДК) на базі нечіткої логіки. Регулятор працює наступним чином. При відхиленні регульованого параметра X від заданого значення X зд на виході суматора 3 з'являється сигнал неузгодженості , який надходить на ПІ-регулятор. Паралельно на КДК через ланку часової затримки (ЛЧЗ) надходять також сигнали за значенням технологічного ˆ параметра X і завдання X зд . 1 UA 107383 U 5 Першим починає працювати швидкодіючий каналз ПІ-регулятором. ПІ-регулятор формує вихідний сигнал, який модулюється широтно-імпульсним модуляторм (ШІМ) і надходить на виконавчий механізм (ВМ), що переміщує регулювальний орган технологічного об'єкта управління (ТОУ) на величину, достатню для компенсації впливу збурення. КДК починає працювати після проходження часу затримки ЛЧЗ. В блоці фазування (БФ) лінгвістичні змінні ˆ , X , X зд 10 15 20 25 якісно характеризуються терм-множинами за допомогою функцій приналежності (ФП). ФП визначають ступінь приналежності того чи іншого елемента терм-множині на інтервалі від 0 до 1. Вихідний сигнал КДК в суматорі 4 частково компенсує сигнал від ПІ-регулятора, тим самим запобігає перерегулюванню і збільшує запас стійкості системи. Таке структурування алгоритму управління допомагає вирішити проблему технічного протиріччя, пов'язану з швидкодією і стійкістю системи автоматичного регулювання. Розмежування в часі дії каналів ПІ-регулятора і КДК дозволяє забезпечити оптимальну швидкодію регулятора в початковій фазі, таким чином мінімізуючи відхилення регульованого параметра, а також зберегти стійкість системи, своєчасно обмеживши чутливий швидкодіючий канал. Реалізація КДК на базі нечіткої логіки дозволяє описати більшу кількість можливих ситуацій, а тому можна чітко передбачити поведінку системи в тому чи іншому випадку. Запропонований регулятор може бути використаний для підвищення якості перехідних процесів для побудови систем автоматичного регулювання широкого спектра об'єктів, які характеризуються нестабільністю динамічних характеристик, великою акумулюючою здатністю, інерційністю і часовим запізненням. Джерела інформації: 1. Дорф Р. Современные системы управления/ Р. Дорф, Р. Бишоп. Пер. с англ. Б.И. Копылова. - М.: Лаборатория Базовых Знаний, 2002. - 832 с. 2. Пат. 67725 UA. Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням/ Ю.М. Ковриго, М.А. Коновалов, А.С. Бунке. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Регулятор з динамічним коректором для об'єктів з часовою затримкою, що містить блок вхідних сигналів, фільтр вхідних сигналів, пропорційно-інтегральний регулятор, блок динамічної корекції вихідного сигналу, блок часової затримки, широтно-імпульсний модулятор, який відрізняється тим, що блок динамічної корекції містить блок фазування вхідних сигналів, базу правил, блок прийняття логічного рішення і блок дефазування вихідних сигналів, формуючи таким чином корегувальний сигнал на базі нечіткої логіки. 2 UA 107383 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKovryho Yurii Mykhailovych
Автори російськоюКовриго Юрий Михайлович
МПК / Мітки
МПК: G05B 11/00
Мітки: затримкою, коректором, часовою, динамічним, об'єктів, регулятор
Код посилання
<a href="https://ua.patents.su/5-107383-regulyator-z-dinamichnim-korektorom-dlya-obehktiv-z-chasovoyu-zatrimkoyu.html" target="_blank" rel="follow" title="База патентів України">Регулятор з динамічним коректором для об’єктів з часовою затримкою</a>
Пропорційно-інтегрально-диференційний регулятор
Номер патенту: 7964
Опубліковано: 15.07.2005
Автори: Кондауров Євген Миколайович, Адамчо Яна Володимирівна, Баранич Юлія Вікторівна, Андрійчук Костянтин Миколайович, Коваленко Алім Олексійович, Гусенцова Яна Алімівна, Подлєсна Світлана Василівна
МПК: H05K 10/00
Мітки: регулятор, пропорційно-інтегрально-диференційний
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегруючу, диференційну ланки та суматор, який відрізняється тим, що він оснащений пневматичним елементом нечіткої логіки.
Пневматичний позиційний регулятор
Номер патенту: 35340
Опубліковано: 15.03.2001
Автори: Соснов Ігор Ігорович, Кондауров Євген Миколайович, Сорока Сергій Іванович, Коваленко Алім Олексійович
МПК: F15C 3/00
Мітки: позиційний, пневматичний, регулятор
Формула / Реферат:
Пневматичний позиційний регулятор, що містить задатчик тиску, елемент порівняння, пристрій предваріння та підсилювач потужності, який відрізняється тим, що поточний тиск надходить в елемент порівняння пневматичного позиційного регулятора через додатково введений пневматичний логічний елемент "АБО" нечіткої логіки.
Пневматичний позиційний регулятор нечіткої логіки
Номер патенту: 52905
Опубліковано: 15.01.2003
Автори: Баранич Юлія Вікторівна, Шакурова Екатерина Володимирівна, Мушкаєв Ярослав Володимирович, Коваленко Алім Олексійович, Прач Станислав Юрьевич
МПК: F15C 1/00
Мітки: нечіткої, пневматичний, позиційний, регулятор, логіки
Формула / Реферат:
Пневматичний позиційний регулятор нечіткої логіки, що містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку, який відрізняється тим, що регулятор оснащений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одномембранних елементах НЕМП.
Система нечіткого керування технологічним об’єктом
Номер патенту: 103582
Опубліковано: 25.12.2015
Автори: Ладанюк Анатолій Петрович, Кишенько Василь Дмитрович, Сюмаченко Дмитро Миколайович
МПК: G05B 13/02
Мітки: система, керування, нечіткого, об'єктом, технологічним
Формула / Реферат:
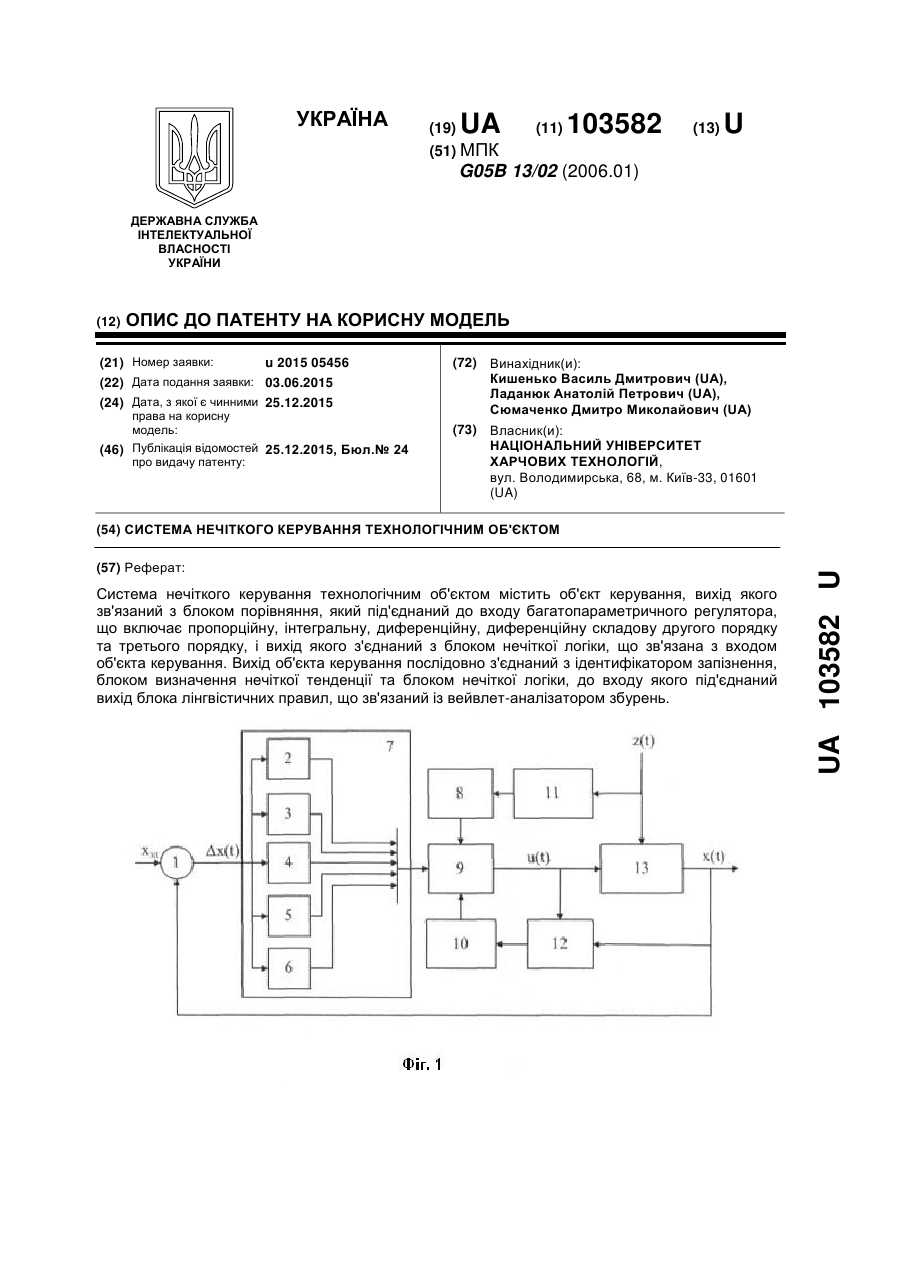
Система нечіткого керування технологічним об'єктом, що містить об'єкт керування, вихід якого зв'язаний з блоком порівняння, який під'єднаний до входу багатопараметричного регулятора, що включає пропорційну, інтегральну, диференційну, диференційну складову другого порядку та третього порядку, і вихід якого з'єднаний з блоком нечіткої логіки, що зв'язана з входом об'єкта керування, яка відрізняється тим, що вихід об'єкта керування послідовно...
Цифровий регулятор
Номер патенту: 65784
Опубліковано: 15.04.2004
Автор: Гостєв Володимир Іванович
МПК: H03L 5/00
Формула / Реферат:
1. Цифровий регулятор, що містить з'єднані блок фіксатора помилки і блок вибірки, який відрізняється тим, що він додатково містить блоки формування сигналів m0, m1, m2, і блок виміру швидкості сигналу, перший та другий виходи якого з'єднані відповідно з другими та третіми входами блоків формування сигналів m0, m1, m2, вихід блока фіксатора помилки з'єднаний з першим входом блока формування сигналу m0, другий вихід блока формування сигналу та...
Попередній патент: Кутомір для колісних дисків
Наступний патент: Автоматична мобільна енергетична установка висоцького-2
Випадковий патент: Сонцезахисний пристрій