Система нечіткого керування технологічним об’єктом
Номер патенту: 103582
Опубліковано: 25.12.2015
Автори: Кишенько Василь Дмитрович, Ладанюк Анатолій Петрович, Сюмаченко Дмитро Миколайович
Формула / Реферат
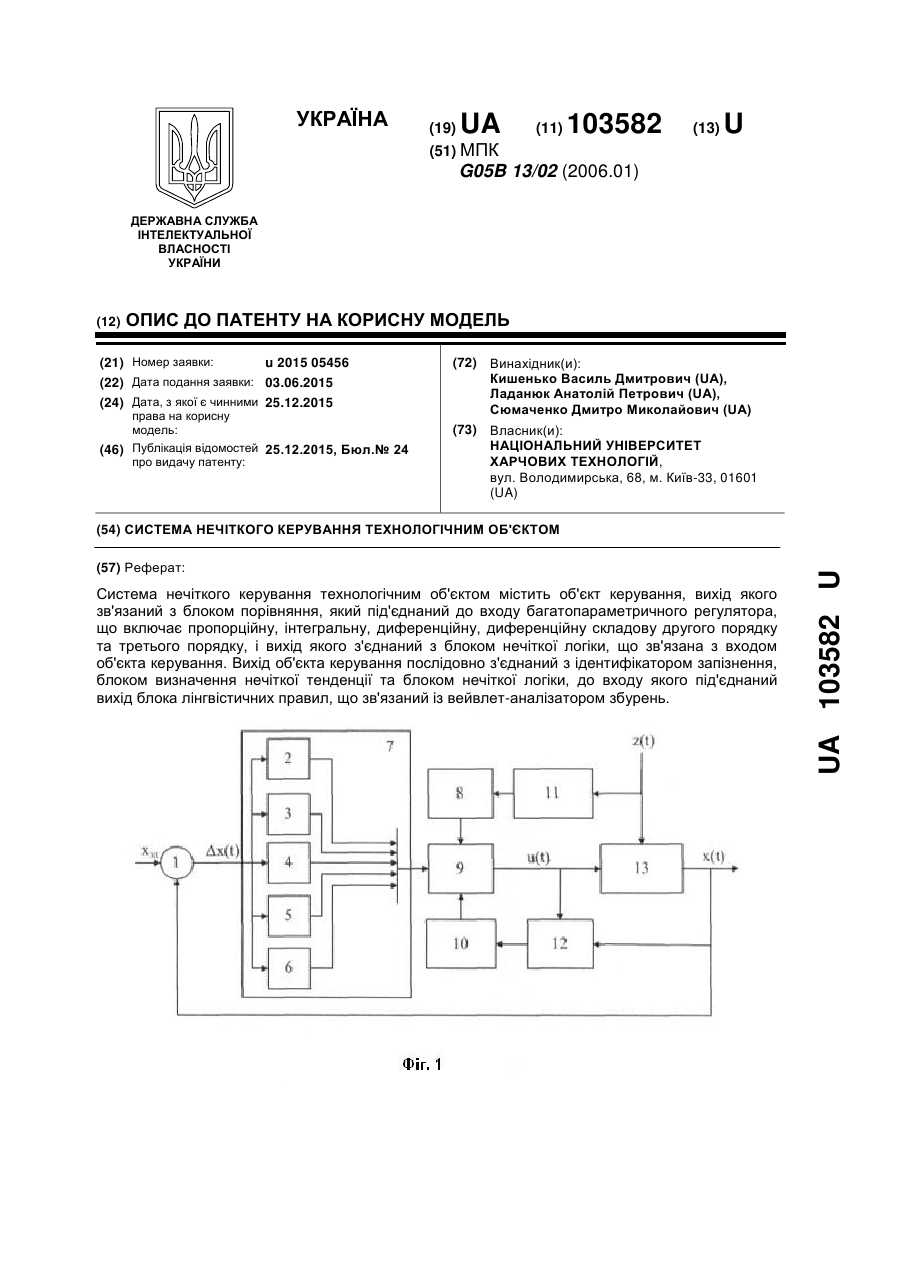
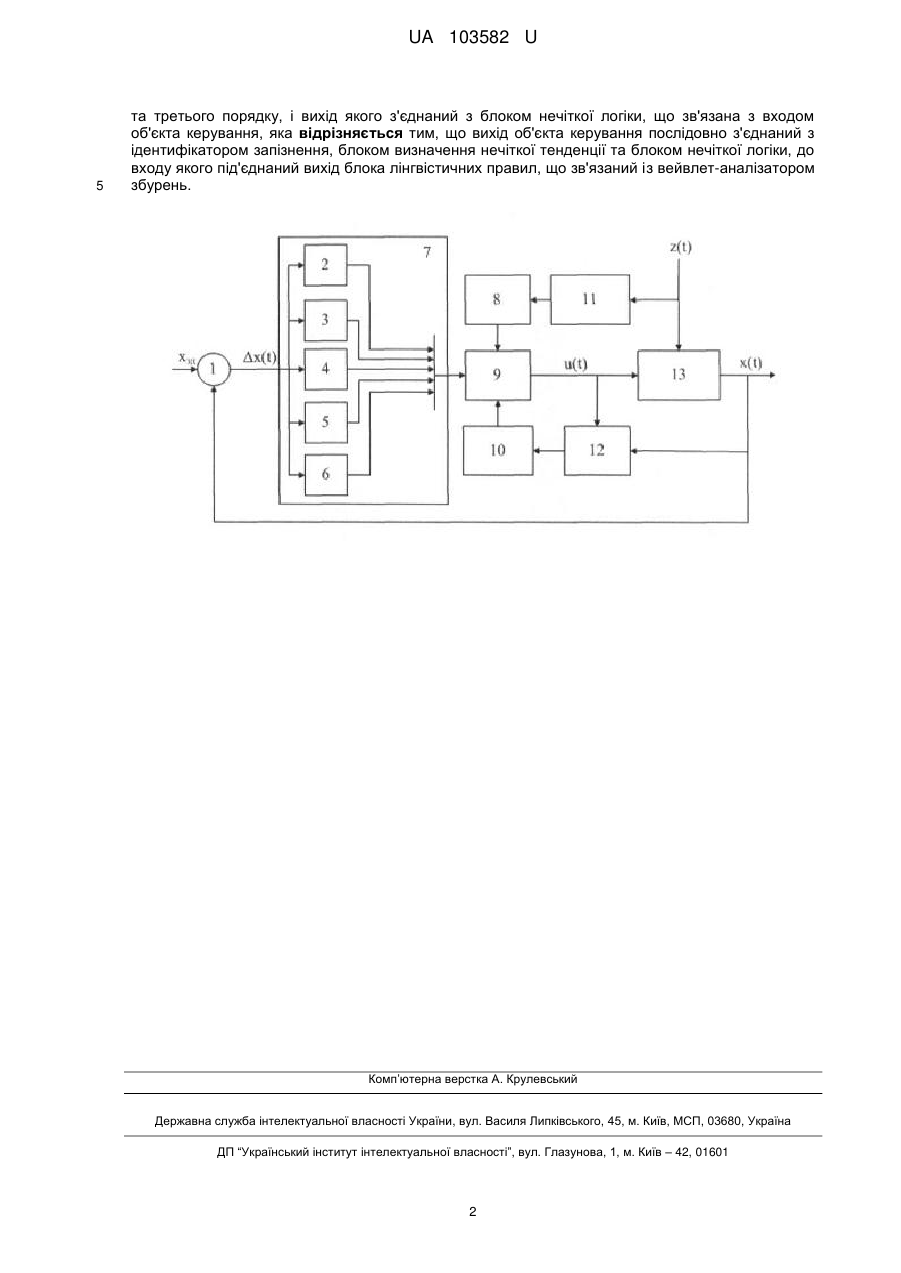
Система нечіткого керування технологічним об'єктом, що містить об'єкт керування, вихід якого зв'язаний з блоком порівняння, який під'єднаний до входу багатопараметричного регулятора, що включає пропорційну, інтегральну, диференційну, диференційну складову другого порядку та третього порядку, і вихід якого з'єднаний з блоком нечіткої логіки, що зв'язана з входом об'єкта керування, яка відрізняється тим, що вихід об'єкта керування послідовно з'єднаний з ідентифікатором запізнення, блоком визначення нечіткої тенденції та блоком нечіткої логіки, до входу якого під'єднаний вихід блока лінгвістичних правил, що зв'язаний із вейвлет-аналізатором збурень.
Текст
Реферат: Система нечіткого керування технологічним об'єктом містить об'єкт керування, вихід якого зв'язаний з блоком порівняння, який під'єднаний до входу багатопараметричного регулятора, що включає пропорційну, інтегральну, диференційну, диференційну складову другого порядку та третього порядку, і вихід якого з'єднаний з блоком нечіткої логіки, що зв'язана з входом об'єкта керування. Вихід об'єкта керування послідовно з'єднаний з ідентифікатором запізнення, блоком визначення нечіткої тенденції та блоком нечіткої логіки, до входу якого під'єднаний вихід блока лінгвістичних правил, що зв'язаний із вейвлет-аналізатором збурень. UA 103582 U (54) СИСТЕМА НЕЧІТКОГО КЕРУВАННЯ ТЕХНОЛОГІЧНИМ ОБ'ЄКТОМ UA 103582 U UA 103582 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до систем автоматичного керування технологічними об'єктами, що мають складну структуру і функціонують в умовах невизначеності. Як прототип вибрано систему керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, ПІДД2Д3 регулятор (з похідними другого та третього порядку), а система містить блок нечіткої логіки [Пат. № 58947 UA, МПК G05B 13/02. Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки /Ладанюк А.П., Кроніковський Д.О. - № 201012738; заявл. 27.10.2010; опубл. 26.04.2011. Бюл. № 8]. Система має досить високу швидкодію, забезпечує зменшення динамічної похибки. До недоліків цієї системи можна віднести неврахування зміни часу запізнення за рахунок зміни характеристик об'єкта керування та відсутність компенсації збурень. Задача корисної моделі - підвищення точності регулювання за рахунок компенсації збурень різної інтенсивності та врахування запізнення. Поставлена задача вирішується тим, що містить об'єкт керування, вихід якого зв'язаний з блоком порівняння, який під'єднаний до входу багатопараметричного регулятора, що включає пропорційну, інтегральну, диференційну, диференційну складову другого порядку та третього порядку, і вихід якого з'єднаний з блоком нечіткої логіки, що зв'язана з входом об'єкта керування, а вихід об'єкта керування послідовно з'єднаний з ідентифікатором запізнення, блоком визначення нечіткої тенденції та блоком нечіткої логіки, до входу якого під'єднаний вихід блока лінгвістичних правил, що зв'язаний із вейвлет-аналізатором збурень. Запропонована система (креслення) містить багатопараметричний регулятор 7, що включає пропорційну 2, інтегральну 3, диференційну 4, диференційну складову другого порядку 5 та третього порядку 6. З входом регулятора 7 з'єднаний вихід блока порівняння 1, до якого під'єднаний вихід об'єкта керування 13. Вихід регулятора 7 з'єднано з входом блока нечіткої логіки 9, до якого також під'єднано виходи блока лінгвістичних правил 8 та блока нечіткої тенденції 10. Вхід блока лінгвістичних правил 8 з'єднано з виходом вейвлет-аналізатора збурень 11. Вихід блока нечіткої логіки 9 зв'язаний з входом об'єкта керування 13 та входом ідентифікатора запізнення 12. Вхід ідентифікатора запізнення 12 під'єднаний до виходу об'єкта керування 13, а вихід ідентифікатора запізнення 12 з'єднаний з входом блока визначення нечіткої тенденції 10. Запропонована система нечіткого керування технологічним об'єктом працює наступним чином. Блок порівняння 1 виконує операцію віднімання та обчислює сигнал розузгодження: Δх(t)=хзд-х(t), (1) хзд - вектор заданих значень керованої величини; Δх(t) - похибка регулювання; x(t) - вектор дійсних значень керованого параметру; t - поточний час. Сигнал розузгодження надходить на вхід багатопараметричного регулятора 7, в якому здійснюється його пропорційне перетворення блоком 2, інтегральне блоком 3, диференційне блоком 4, диференційне другого порядку блоком 5 та диференційне третього порядку блоком 6. Вихідні сигнали блоків 2, 3, 4, 5, 6 надходять в блок нечіткої логіки 9, в якому здійснюється формування вектору керуючих дій u(t) з урахуванням коригуючих сигналів від блока лінгвістичних правил 8 та блока визначення нечіткої тенденції 10. Особливості вектора збурень z(t), що надходить на об'єкт 13 визначаються вейвлетаналізатором 11. Ідентифікатор запізнення 12 на основі інформації про вектор дійсних значень керованого параметру x(t) та вектору керуючих дій u(t) визначає час запізнення, за яким здійснюється прогноз нечіткої тенденції розвитку об'єкта блоком визначення нечіткої тенденції 10. Технічний результат корисної моделі полягає в тому, що система нечіткого керування технологічним об'єктом підвищує якість керування в умовах невизначеності та діючих на об'єкт збурень. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Система нечіткого керування технологічним об'єктом, що містить об'єкт керування, вихід якого зв'язаний з блоком порівняння, який під'єднаний до входу багатопараметричного регулятора, що включає пропорційну, інтегральну, диференційну, диференційну складову другого порядку 1 UA 103582 U 5 та третього порядку, і вихід якого з'єднаний з блоком нечіткої логіки, що зв'язана з входом об'єкта керування, яка відрізняється тим, що вихід об'єкта керування послідовно з'єднаний з ідентифікатором запізнення, блоком визначення нечіткої тенденції та блоком нечіткої логіки, до входу якого під'єднаний вихід блока лінгвістичних правил, що зв'язаний із вейвлет-аналізатором збурень. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 13/02
Мітки: технологічним, керування, нечіткого, об'єктом, система
Код посилання
<a href="https://ua.patents.su/4-103582-sistema-nechitkogo-keruvannya-tekhnologichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Система нечіткого керування технологічним об’єктом</a>
Система керування технологічним об’єктом з використанням багатопараметричного регулятора на основі нечіткої логіки
Номер патенту: 58947
Опубліковано: 26.04.2011
Автори: Кроніковський Дмитро Олегович, Ладанюк Анатолій Петрович
МПК: G05B 11/01, G05B 13/02
Мітки: основі, система, використанням, логіки, технологічним, регулятора, керування, багатопараметричного, об'єктом, нечіткої
Формула / Реферат:
Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, пропорційно-інтегрально-диференційний регулятор, яка відрізняється тим, що пропорційно-інтегрально-диференційний регулятор додатково містить похідні другого та третього порядку, а система додатково містить блок нечіткої логіки, який в свою чергу...
Система керування технологічним об’єктом
Номер патенту: 41820
Опубліковано: 10.06.2009
Автори: Єсаулов Сергій Михайлович, Шавкун В'ячеслав Михайлович, Бабічева Ольга Федорівна, Савостьян Олексій Сергійович, Бабаков Сергій В'ячеславович
МПК: G05B 13/02
Мітки: об'єктом, керування, технологічним, система
Формула / Реферат:
Система керування технологічним об'єктом, що містить послідовно з'єднані формувач тестового сигналу, перший суматор, другий суматор, регулятор, виконавчий пристрій і об'єкт керування із запізнюванням, вихід якого з'єднаний з другим входом першого суматора, а також послідовно з'єднані модель об'єкта керування без запізнювання, модель транспортного запізнювання і третій суматор, вихід якого з'єднаний з другим входом другого суматора, вхід...
Система керування резонансним інвертором
Номер патенту: 46316
Опубліковано: 10.12.2009
Автори: Ушаков Володимир Іванович, Кобець Данило Васильович, Середа Сергій Миколайович
МПК: H02M 7/539
Мітки: система, інвертором, резонансним, керування
Формула / Реферат:
Система керування резонансним інвертором, що включає блок неузгодження, на перший вхід якого надходить вхідний струм резонансного інвертора, а другий вхід підключений до виходу датчика поточного струму навантаження, а також блок формування імпульсів керування ключами, вихід якого підключений до резонансного інвертора, яка відрізняється тим, що містить блок нечіткої логіки, до одного входу якого підключений вихід блока неузгодження, а до...
Система керування технологічним об`єктом
Номер патенту: 51692
Опубліковано: 26.07.2010
Автори: Храмцов Анатолій Дмитрович, Браславець Оксана Сергіївна, Єсаулов Сергій Михайлович, Лукашова Наталя Павлівна, Бабічева Ольга Федорівна
МПК: G05B 13/00
Мітки: керування, система, технологічним, об'єктом
Формула / Реферат:
Система керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані перший блок порівняння і другий регулятор, вихід якого з'єднаний з другим входом суматора, до виходу якого підключені...
Система адаптивного управління сушаркою солоду на основі нечіткого підходу
Номер патенту: 89465
Опубліковано: 25.04.2014
Автори: Смітюх Ярослав Володимирович, Ладанюк Анатолій Петрович, Герасименко Тетяна Михайлівна
Мітки: сушаркою, управління, солоду, основі, нечіткого, підходу, система, адаптивного
Формула / Реферат:
Система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційно-інтегрально-диференціального регулятора, яка відрізняється тим, що в систему додається блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U*1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що...
Попередній патент: Спосіб виробництва пористих вуглецевих матеріалів із піролізованих деревних відходів
Наступний патент: Секція смугового обробітку ґрунту
Випадковий патент: Машина забивання чавунної льотки доменної печі