Верстат паралельної кінематики з мехатронною системою активного контролю
Номер патенту: 111381
Опубліковано: 25.04.2016
Автори: Дем'яненко Анатолій Сергійович, Струтинський Василь Борисович
Формула / Реферат
Верстат паралельної кінематики, що складається з несучої системи, рухомої платформи з робочим органом, шести механізмів повздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з несучою системою та рухомою платформою, при цьому шарніри механізмів повздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на несучій системі, який відрізняється тим, що між рухомою платформою та несучою системою верстата шарнірно встановлено не менше шести перетворювачів лінійних переміщень, які утворюють додатковий просторовий механізм паралельної кінематики, причому шарніри перетворювачів встановлені на рухомій платформі та розміщені між парами шарнірів механізмів поздовжнього переміщення, а виходи перетворювачів через АЦП зв'язані з персональним комп'ютером, в якому здійснюється корекція керуючого сигналу шести механізмів поздовжнього переміщення, чим забезпечується активний контроль просторового положення платформи зі змінами довжин штанг.
Текст
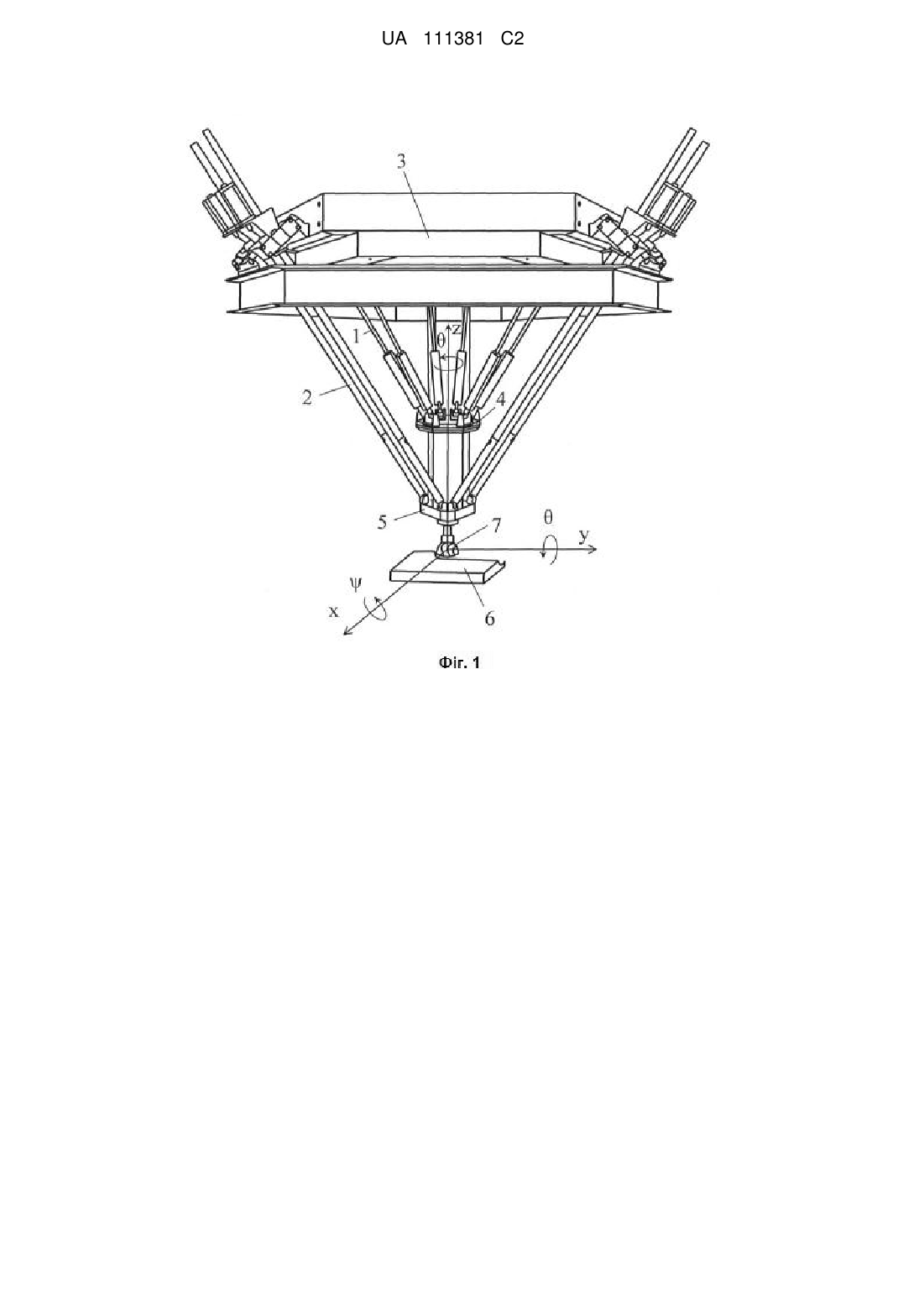
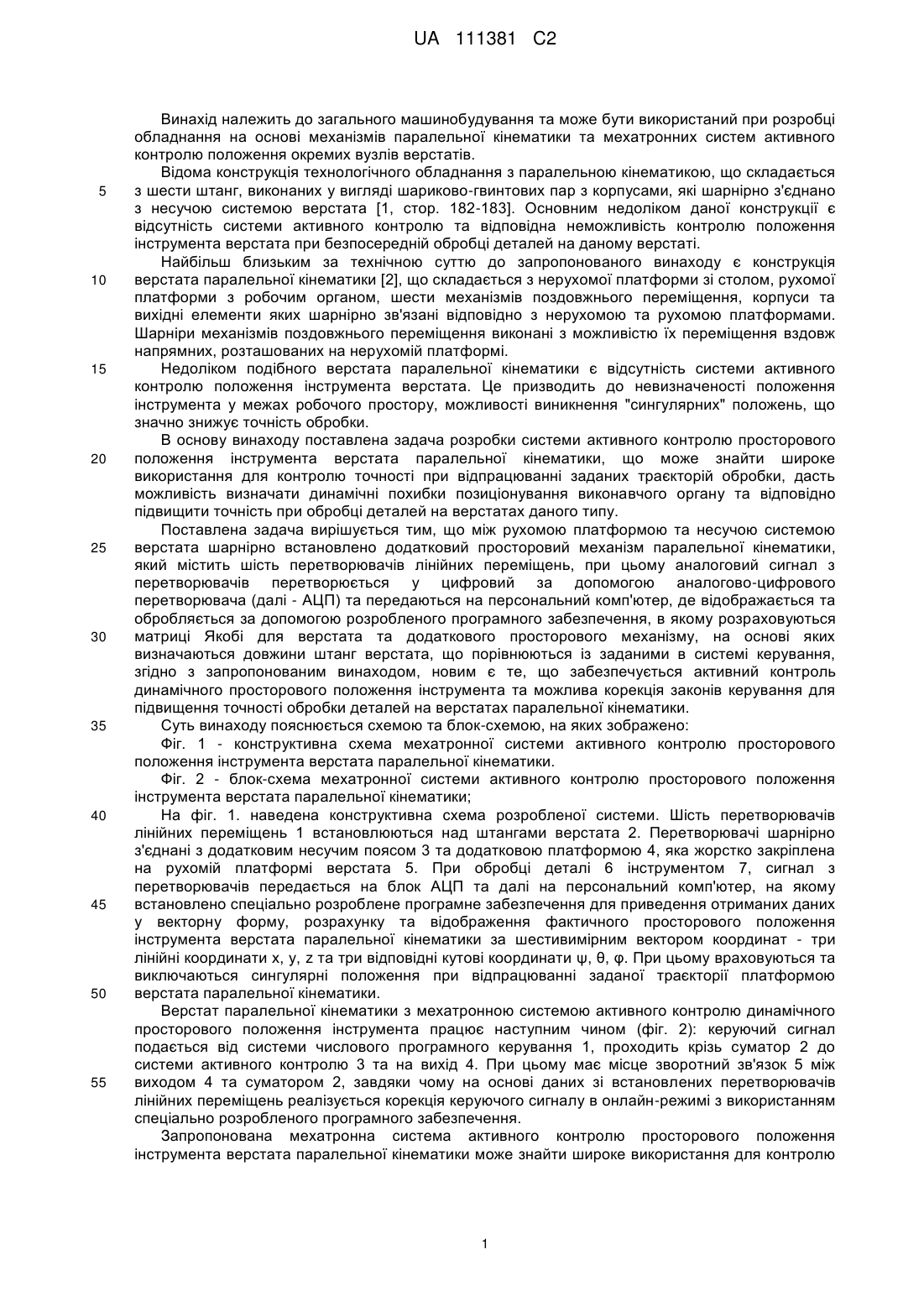
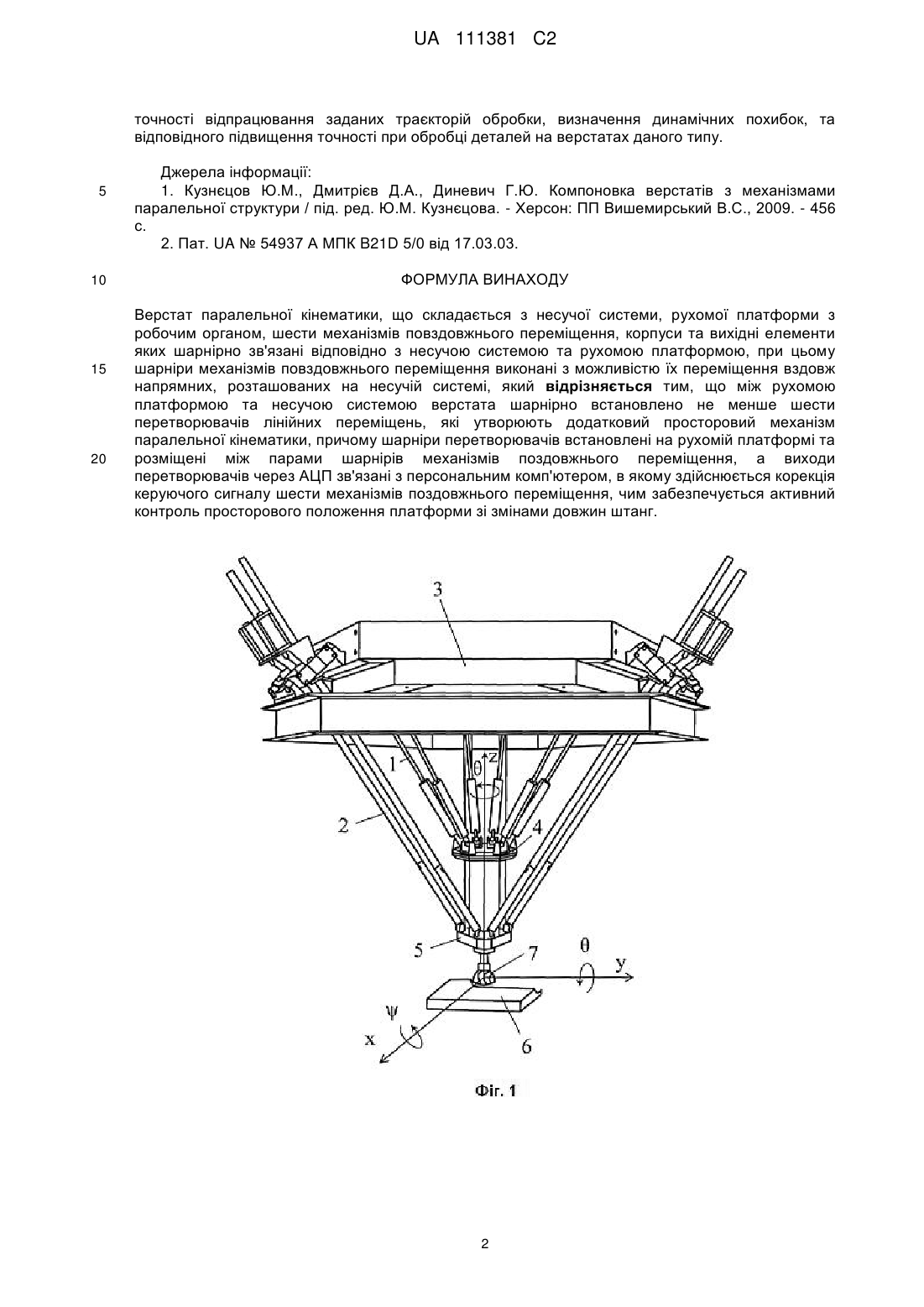
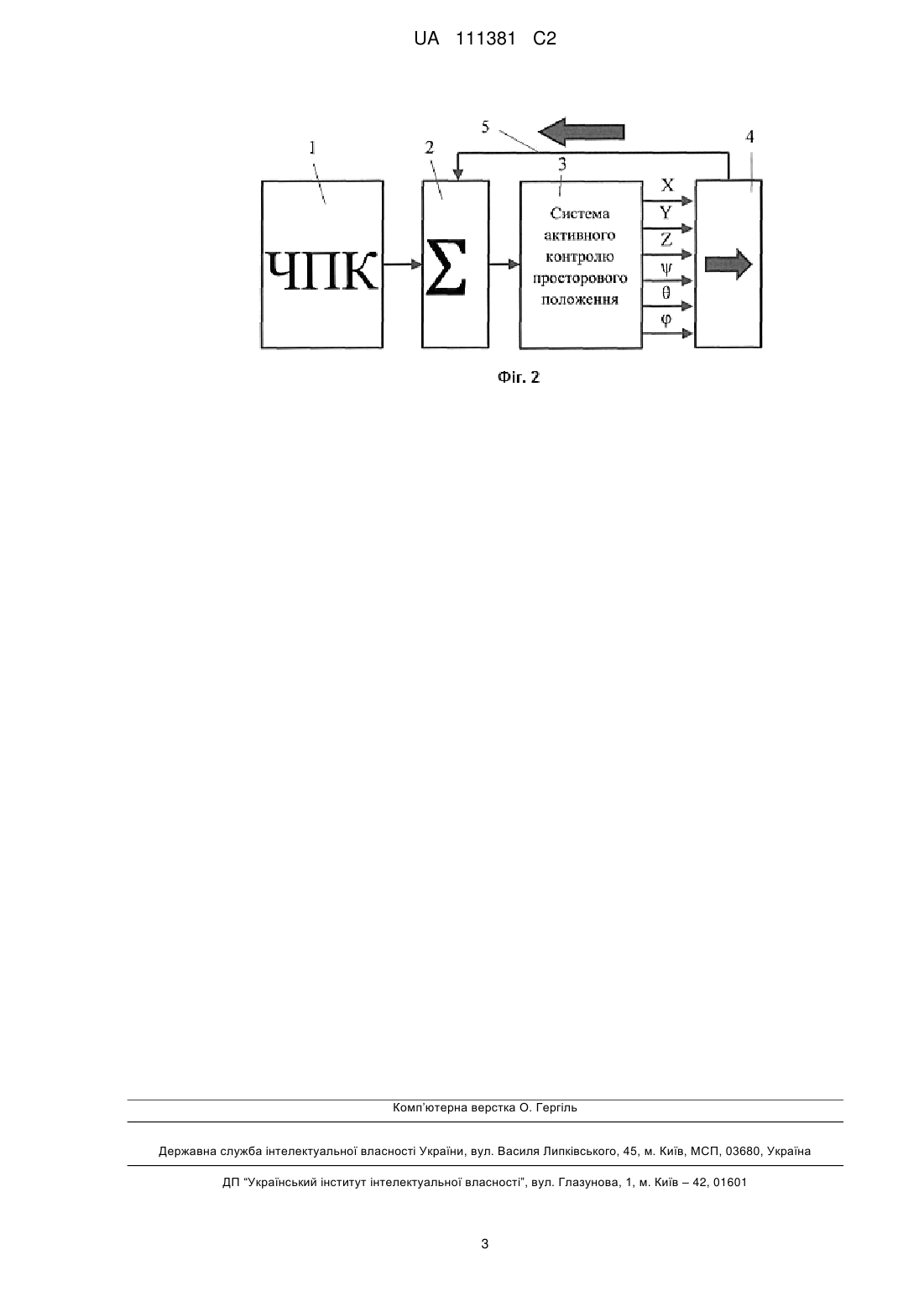
Реферат: Винахід належить до загального машинобудування та може бути використаний при розробці обладнання на основі механізмів паралельної кінематики та мехатронних систем активного контролю положення окремих вузлів верстатів. В основу винаходу поставлена задача реалізації мехатронної системи активного контролю динамічного просторового положення інструмента верстата паралельної кінематики, що забезпечує корекцію керуючого сигналу та підвищення точності відпрацювання заданих траєкторій при обробці шляхом введення зворотного зв'язку та відповідної корекції законів руху. Поставлена задача вирішується за рахунок шарнірного встановлення між рухомою платформою та несучою системою верстата не менше шести перетворювачів лінійних переміщень, які утворюють додатковий просторовий механізм паралельної кінематики, при цьому аналоговий сигнал з перетворювачів перетворюється у цифровий за допомогою аналогово-цифрового перетворювача та передається на персональний комп'ютер, де відображається та обробляється за допомогою спеціально розробленого програмного забезпечення, що забезпечує активний контроль динамічного просторового положення інструмента та корекцію керуючих сигналів для підвищення точності обробки на верстатах паралельної кінематики. UA 111381 C2 (12) UA 111381 C2 UA 111381 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до загального машинобудування та може бути використаний при розробці обладнання на основі механізмів паралельної кінематики та мехатронних систем активного контролю положення окремих вузлів верстатів. Відома конструкція технологічного обладнання з паралельною кінематикою, що складається з шести штанг, виконаних у вигляді шариково-гвинтових пар з корпусами, які шарнірно з'єднано з несучою системою верстата [1, стор. 182-183]. Основним недоліком даної конструкції є відсутність системи активного контролю та відповідна неможливість контролю положення інструмента верстата при безпосередній обробці деталей на даному верстаті. Найбільш близьким за технічною суттю до запропонованого винаходу є конструкція верстата паралельної кінематики [2], що складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами. Шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі. Недоліком подібного верстата паралельної кінематики є відсутність системи активного контролю положення інструмента верстата. Це призводить до невизначеності положення інструмента у межах робочого простору, можливості виникнення "сингулярних" положень, що значно знижує точність обробки. В основу винаходу поставлена задача розробки системи активного контролю просторового положення інструмента верстата паралельної кінематики, що може знайти широке використання для контролю точності при відпрацюванні заданих траєкторій обробки, дасть можливість визначати динамічні похибки позиціонування виконавчого органу та відповідно підвищити точність при обробці деталей на верстатах даного типу. Поставлена задача вирішується тим, що між рухомою платформою та несучою системою верстата шарнірно встановлено додатковий просторовий механізм паралельної кінематики, який містить шість перетворювачів лінійних переміщень, при цьому аналоговий сигнал з перетворювачів перетворюється у цифровий за допомогою аналогово-цифрового перетворювача (далі - АЦП) та передаються на персональний комп'ютер, де відображається та обробляється за допомогою розробленого програмного забезпечення, в якому розраховуються матриці Якобі для верстата та додаткового просторового механізму, на основі яких визначаються довжини штанг верстата, що порівнюються із заданими в системі керування, згідно з запропонованим винаходом, новим є те, що забезпечується активний контроль динамічного просторового положення інструмента та можлива корекція законів керування для підвищення точності обробки деталей на верстатах паралельної кінематики. Суть винаходу пояснюється схемою та блок-схемою, на яких зображено: Фіг. 1 - конструктивна схема мехатронної системи активного контролю просторового положення інструмента верстата паралельної кінематики. Фіг. 2 - блок-схема мехатронної системи активного контролю просторового положення інструмента верстата паралельної кінематики; На фіг. 1. наведена конструктивна схема розробленої системи. Шість перетворювачів лінійних переміщень 1 встановлюються над штангами верстата 2. Перетворювачі шарнірно з'єднані з додатковим несучим поясом 3 та додатковою платформою 4, яка жорстко закріплена на рухомій платформі верстата 5. При обробці деталі 6 інструментом 7, сигнал з перетворювачів передається на блок АЦП та далі на персональний комп'ютер, на якому встановлено спеціально розроблене програмне забезпечення для приведення отриманих даних у векторну форму, розрахунку та відображення фактичного просторового положення інструмента верстата паралельної кінематики за шестивимірним вектором координат - три лінійні координати х, у, z та три відповідні кутові координати ψ, θ, φ. При цьому враховуються та виключаються сингулярні положення при відпрацюванні заданої траєкторії платформою верстата паралельної кінематики. Верстат паралельної кінематики з мехатронною системою активного контролю динамічного просторового положення інструмента працює наступним чином (фіг. 2): керуючий сигнал подається від системи числового програмного керування 1, проходить крізь суматор 2 до системи активного контролю 3 та на вихід 4. При цьому має місце зворотний зв'язок 5 між виходом 4 та суматором 2, завдяки чому на основі даних зі встановлених перетворювачів лінійних переміщень реалізується корекція керуючого сигналу в онлайн-режимі з використанням спеціально розробленого програмного забезпечення. Запропонована мехатронна система активного контролю просторового положення інструмента верстата паралельної кінематики може знайти широке використання для контролю 1 UA 111381 C2 точності відпрацювання заданих траєкторій обробки, визначення динамічних похибок, та відповідного підвищення точності при обробці деталей на верстатах даного типу. 5 10 15 20 Джерела інформації: 1. Кузнєцов Ю.М., Дмитрієв Д.А., Диневич Г.Ю. Компоновка верстатів з механізмами паралельної структури / під. ред. Ю.М. Кузнєцова. - Херсон: ПП Вишемирський В.С., 2009. - 456 с. 2. Пат. UA № 54937 А МПК B21D 5/0 від 17.03.03. ФОРМУЛА ВИНАХОДУ Верстат паралельної кінематики, що складається з несучої системи, рухомої платформи з робочим органом, шести механізмів повздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з несучою системою та рухомою платформою, при цьому шарніри механізмів повздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на несучій системі, який відрізняється тим, що між рухомою платформою та несучою системою верстата шарнірно встановлено не менше шести перетворювачів лінійних переміщень, які утворюють додатковий просторовий механізм паралельної кінематики, причому шарніри перетворювачів встановлені на рухомій платформі та розміщені між парами шарнірів механізмів поздовжнього переміщення, а виходи перетворювачів через АЦП зв'язані з персональним комп'ютером, в якому здійснюється корекція керуючого сигналу шести механізмів поздовжнього переміщення, чим забезпечується активний контроль просторового положення платформи зі змінами довжин штанг. 2 UA 111381 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюParallel link machine with mechatronic system of active control
Автори англійськоюStrutynskyi Vasyl Borysovych, Demianenko Anatolii Serhiiovych
Назва патенту російськоюСтанок параллельной кинематики с мехатронной системой активного контроля
Автори російськоюСтрутинский Василий Борисович, Демьяненко Анатолий Сергеевич
МПК / Мітки
МПК: B23Q 5/34
Мітки: системою, активного, паралельно, контролю, мехатронною, кінематики, верстат
Код посилання
<a href="https://ua.patents.su/5-111381-verstat-paralelno-kinematiki-z-mekhatronnoyu-sistemoyu-aktivnogo-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Верстат паралельної кінематики з мехатронною системою активного контролю</a>
Привід точних лінійних переміщень для механізму паралельної кінематики
Номер патенту: 73308
Опубліковано: 25.09.2012
Автори: Юрчишин Оксана Ярославівна, Струтинський Сергій Васильович
МПК: F16H 25/22
Мітки: механізму, привід, переміщень, точних, лінійних, кінематики, паралельно
Формула / Реферат:
Привід точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі, розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу штанги, який відрізняється тим, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Багатокоординатний фрезерний верстат

Номер патенту: 66830
Опубліковано: 25.01.2012
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович, Фіранський Володимир Борисович, Степаненко Олександр Олександрович
МПК: B23B 35/00, B23C 1/00
Мітки: фрезерний, багатокоординатний, верстат
Формула / Реферат:
Багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, причому опори осей механізмів поступового руху утворюють в нижній частині...
Електронно-механічна система активного контролю і керування врізним шліфуванням
Номер патенту: 3918
Опубліковано: 15.12.2004
Автори: Марчук Віктор Іванович, Кайдик Олег Леонтійович, Красовський Володимир Всеволодович
МПК: B24B 49/00, G05D 5/00
Мітки: електронно-механічна, система, контролю, врізним, шліфуванням, активного, керування
Формула / Реферат:
Електронно-механічна система активного контролю і керування врізним шліфуванням, що містить встановлені у технологічній послідовності оправку-тримач, давач мікропереміщень, механічний компенсатор, шліфувальний круг, бабку шліфувального круга, шпиндель деталі, яка відрізняється тим, що вона сформована за допомогою давача мікропереміщень та відліково-керуючого пристрою.
Пристрій для активного контролю стану оператора
Номер патенту: 58957
Опубліковано: 15.08.2003
Автор: Герасіка Віктор Андрійович
МПК: G08B 23/00, A61B 5/05
Мітки: стану, пристрій, оператора, контролю, активного
Формула / Реферат:
1. Пристрій для активного контролю стану оператора, що містить реєстратор рухової активності оператора, блок сигналізації, який відрізняється тим, що реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний до спрацьовуючого на електричні сигнали таймера, вихід якого під'єднаний до блока сигналізації, при цьому електричний давач розміщений у зоні впливу на його параметри положення пальців рук...
Попередній патент: Високовольтний трансформаторний модуль
Наступний патент: Інгібітори протеїнкінази
Випадковий патент: Прецизійний повторювач напруги