Важільний шестиланковий механізм з регульованими тривалістю зупинки вихідної ланки, максимальним розмахом та кутом нахилу вихідної ланки у фазі зупинки
Формула / Реферат
Шарнірно-важільний механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді трикутника, дві вершини якого шарнірно зв'язані з кривошипом та коромислом, а за шатунну точку, що знаходиться на третій вершині шатуна, прийнято точку Болла, з можливістю опису нею кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому ця шатунна точка шарнірно зв'язана з повзуном, який має напрямну, що паралельна прямолінійній ділянці шатунної кривої та утворює поступальну пару з пазом вихідної ланки-коромисла, за центр обертання якого прийнято полюс повороту шатунної площини, який відрізняється тим, що механізм виконано з можливістю зміни положення шатунної точки з положення точки Болла у положення точки розпрямлення 5-го порядку, при цьому зміниться тривалість зупинки вихідної ланки, її максимальний розмах та кут нахилу у фазі зупинки.
Текст
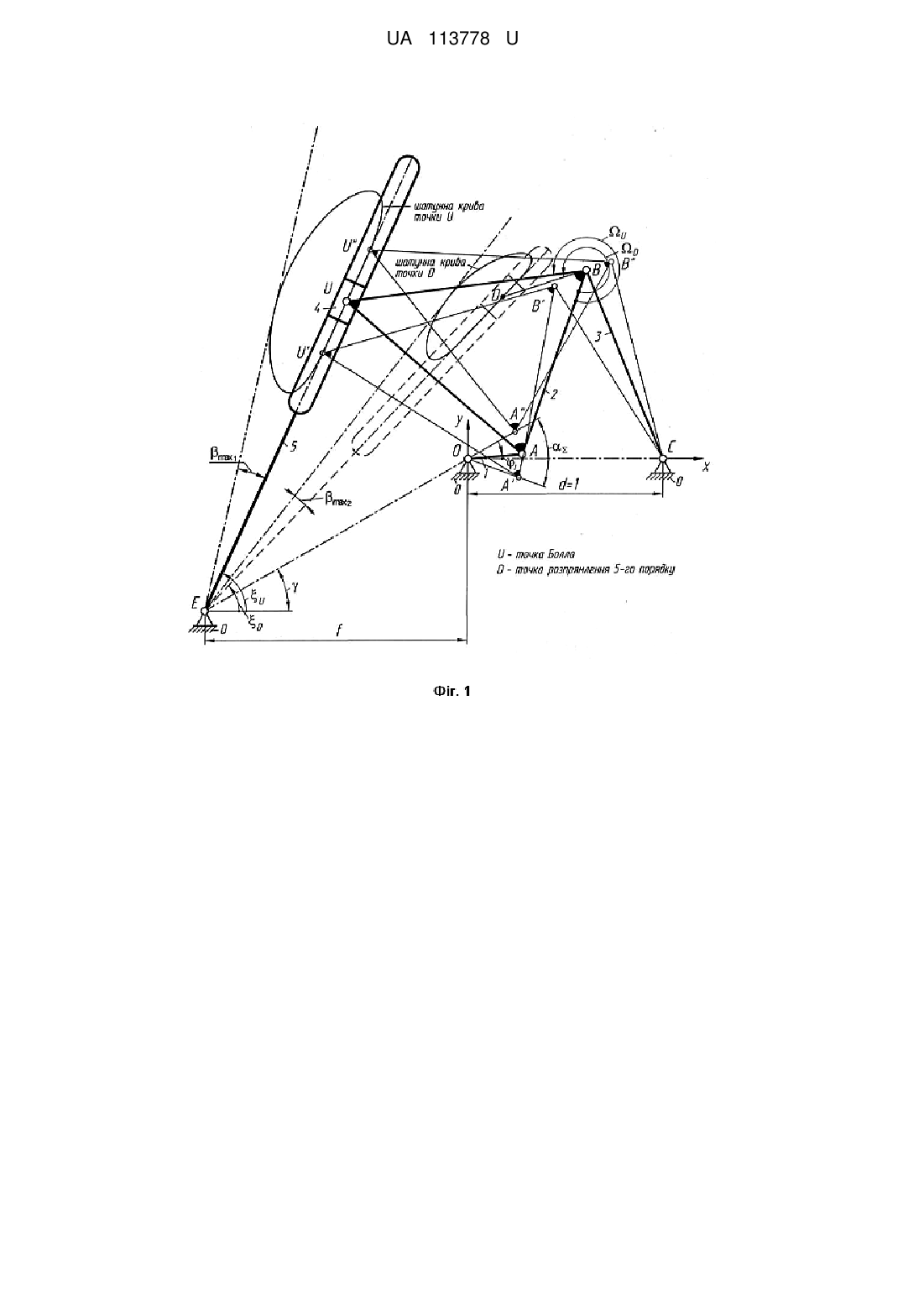
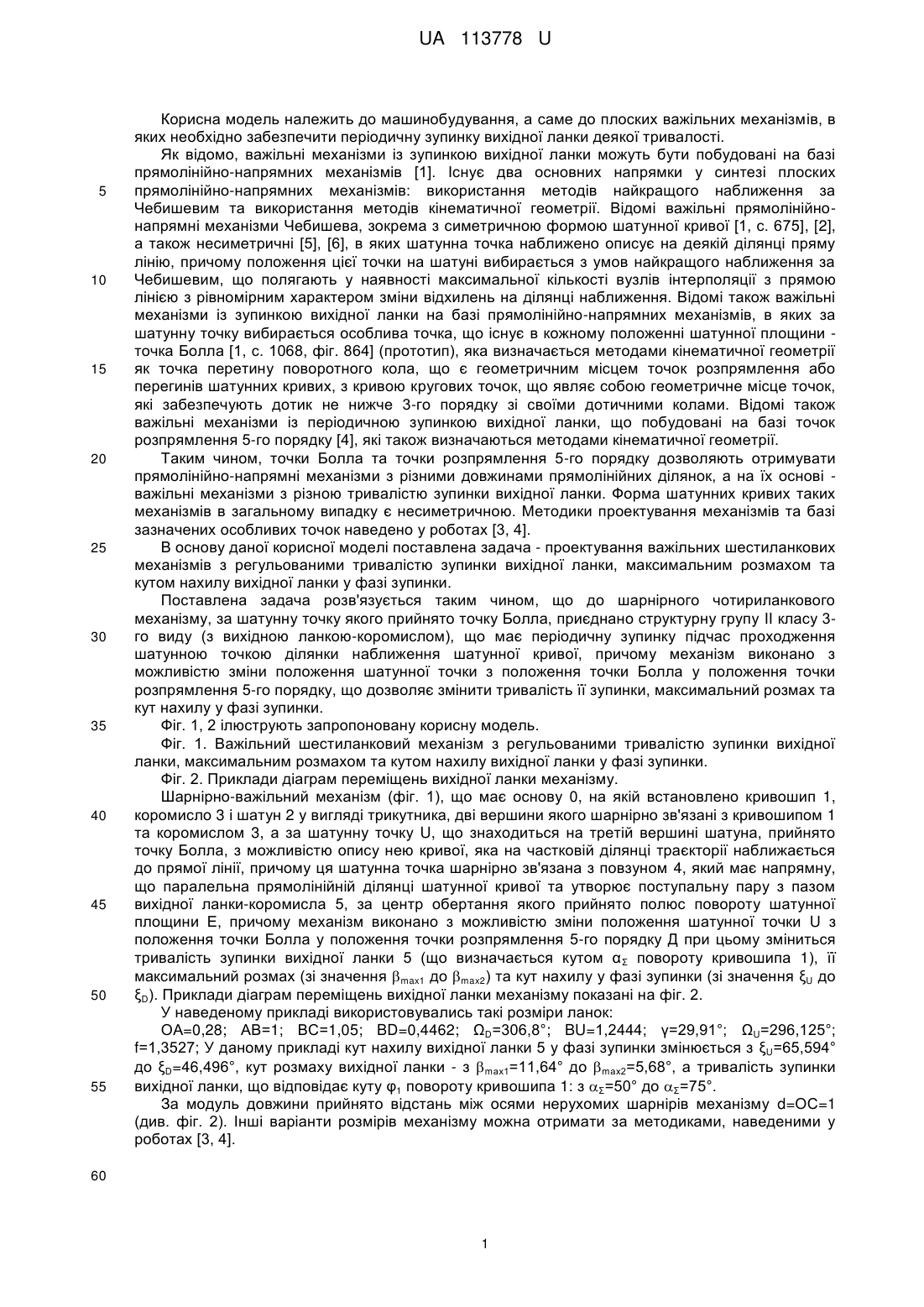
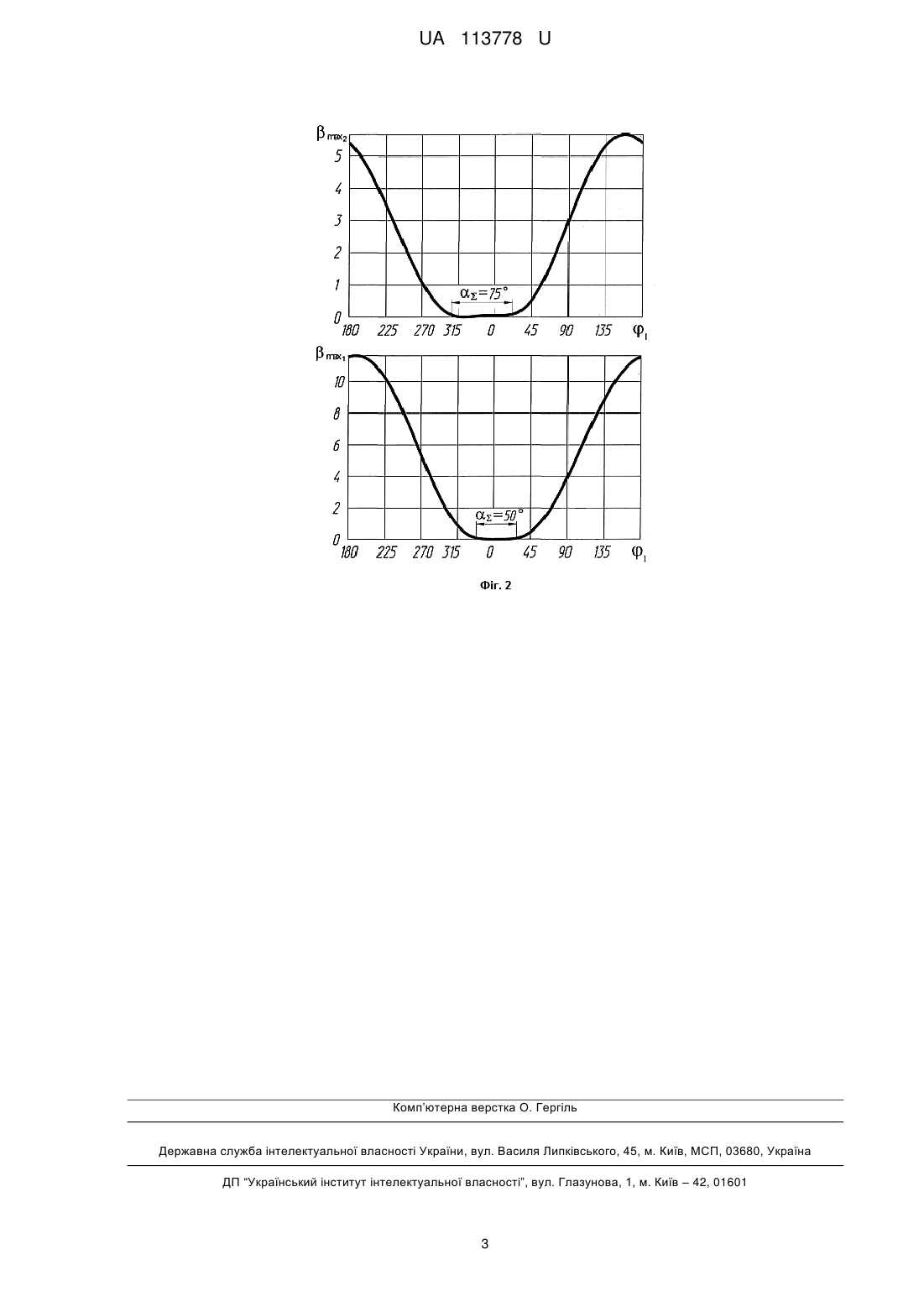
Реферат: Шарнірно-важільний механізм має основу, на якій встановлено кривошип, коромисло і шатун у вигляді трикутника, дві вершини якого шарнірно зв'язані з кривошипом та коромислом, а за шатунну точку, що знаходиться на третій вершині шатуна, прийнято точку Болла, з можливістю опису нею кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому ця шатунна точка шарнірно зв'язана з повзуном, який має напрямну, що паралельна прямолінійній ділянці шатунної кривої та утворює поступальну пару з пазом вихідної ланки-коромисла, за центр обертання якого прийнято полюс повороту шатунної площини. Крім цього, механізм виконано з можливістю зміни положення шатунної точки з положення точки Болла у положення точки розпрямлення 5-го порядку, при цьому зміниться тривалість зупинки вихідної ланки, її максимальний розмах та кут нахилу у фазі зупинки. UA 113778 U (54) ВАЖІЛЬНИЙ ШЕСТИЛАНКОВИЙ МЕХАНІЗМ З РЕГУЛЬОВАНИМИ ТРИВАЛІСТЮ ЗУПИНКИ ВИХІДНОЇ ЛАНКИ, МАКСИМАЛЬНИМ РОЗМАХОМ ТА КУТОМ НАХИЛУ ВИХІДНОЇ ЛАНКИ У ФАЗІ ЗУПИНКИ UA 113778 U UA 113778 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, а саме до плоских важільних механізмів, в яких необхідно забезпечити періодичну зупинку вихідної ланки деякої тривалості. Як відомо, важільні механізми із зупинкою вихідної ланки можуть бути побудовані на базі прямолінійно-напрямних механізмів [1]. Існує два основних напрямки у синтезі плоских прямолінійно-напрямних механізмів: використання методів найкращого наближення за Чебишевим та використання методів кінематичної геометрії. Відомі важільні прямолінійнонапрямні механізми Чебишева, зокрема з симетричною формою шатунної кривої [1, с. 675], [2], а також несиметричні [5], [6], в яких шатунна точка наближено описує на деякій ділянці пряму лінію, причому положення цієї точки на шатуні вибирається з умов найкращого наближення за Чебишевим, що полягають у наявності максимальної кількості вузлів інтерполяції з прямою лінією з рівномірним характером зміни відхилень на ділянці наближення. Відомі також важільні механізми із зупинкою вихідної ланки на базі прямолінійно-напрямних механізмів, в яких за шатунну точку вибирається особлива точка, що існує в кожному положенні шатунної площини точка Болла [1, с. 1068, фіг. 864] (прототип), яка визначається методами кінематичної геометрії як точка перетину поворотного кола, що є геометричним місцем точок розпрямлення або перегинів шатунних кривих, з кривою кругових точок, що являє собою геометричне місце точок, які забезпечують дотик не нижче 3-го порядку зі своїми дотичними колами. Відомі також важільні механізми із періодичною зупинкою вихідної ланки, що побудовані на базі точок розпрямлення 5-го порядку [4], які також визначаються методами кінематичної геометрії. Таким чином, точки Болла та точки розпрямлення 5-го порядку дозволяють отримувати прямолінійно-напрямні механізми з різними довжинами прямолінійних ділянок, а на їх основі важільні механізми з різною тривалістю зупинки вихідної ланки. Форма шатунних кривих таких механізмів в загальному випадку є несиметричною. Методики проектування механізмів та базі зазначених особливих точок наведено у роботах [3, 4]. В основу даної корисної моделі поставлена задача - проектування важільних шестиланкових механізмів з регульованими тривалістю зупинки вихідної ланки, максимальним розмахом та кутом нахилу вихідної ланки у фазі зупинки. Поставлена задача розв'язується таким чином, що до шарнірного чотириланкового механізму, за шатунну точку якого прийнято точку Болла, приєднано структурну групу II класу 3го виду (з вихідною ланкою-коромислом), що має періодичну зупинку підчас проходження шатунною точкою ділянки наближення шатунної кривої, причому механізм виконано з можливістю зміни положення шатунної точки з положення точки Болла у положення точки розпрямлення 5-го порядку, що дозволяє змінити тривалість її зупинки, максимальний розмах та кут нахилу у фазі зупинки. Фіг. 1, 2 ілюструють запропоновану корисну модель. Фіг. 1. Важільний шестиланковий механізм з регульованими тривалістю зупинки вихідної ланки, максимальним розмахом та кутом нахилу вихідної ланки у фазі зупинки. Фіг. 2. Приклади діаграм переміщень вихідної ланки механізму. Шарнірно-важільний механізм (фіг. 1), що має основу 0, на якій встановлено кривошип 1, коромисло 3 і шатун 2 у вигляді трикутника, дві вершини якого шарнірно зв'язані з кривошипом 1 та коромислом 3, а за шатунну точку U, що знаходиться на третій вершині шатуна, прийнято точку Болла, з можливістю опису нею кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому ця шатунна точка шарнірно зв'язана з повзуном 4, який має напрямну, що паралельна прямолінійній ділянці шатунної кривої та утворює поступальну пару з пазом вихідної ланки-коромисла 5, за центр обертання якого прийнято полюс повороту шатунної площини Е, причому механізм виконано з можливістю зміни положення шатунної точки U з положення точки Болла у положення точки розпрямлення 5-го порядку Д при цьому зміниться тривалість зупинки вихідної ланки 5 (що визначається кутом α Σ повороту кривошипа 1), її максимальний розмах (зі значення max1 до max2) та кут нахилу у фазі зупинки (зі значення ξU до ξD). Приклади діаграм переміщень вихідної ланки механізму показані на фіг. 2. У наведеному прикладі використовувались такі розміри ланок: ОА=0,28; АВ=1; ВС=1,05; BD=0,4462; ΩD=306,8°; BU=1,2444; γ=29,91°; ΩU=296,125°; f=1,3527; У даному прикладі кут нахилу вихідної ланки 5 у фазі зупинки змінюється з ξU=65,594° до ξD=46,496°, кут розмаху вихідної ланки - з mах1=11,64° до mах2=5,68°, а тривалість зупинки вихідної ланки, що відповідає куту φ1 повороту кривошипа 1: з Σ=50° до Σ=75°. За модуль довжини прийнято відстань між осями нерухомих шарнірів механізму d=ОС=1 (див. фіг. 2). Інші варіанти розмірів механізму можна отримати за методиками, наведеними у роботах [3, 4]. 60 1 UA 113778 U 5 10 15 Джерела інформації: 1. Артоболевский И.И. Синтез плоских механизмов. / И.И. Артоболевский, Н.И Левитский, С.А. Черкудинов - М.: Физматгиз, 1959. - 1084 с. 2. Киницкий Я.Т. Шарнирные механизмы Чебышева с выстоем выходного звена / Я.Т. Киницкий. - К.: Вища школа, 1990. - 232 с. 3. Харжевський В.О. Синтез важільних механізмів із зупинкою вихідної ланки методами кінематичної геометрії: монографія / В.О. Харжевський. - Хмельницький: РВЦ ХНУ, 2015. - 223 с. 4. Харжевський В.О. Метод синтезу важільних прямолінійно-напрямних механізмів з використанням точок розпрямлення 5-го порядку // Вісник Хмельницького національного університету. - 2015. - № 5 (229) - С. 62-67. 5. Funk W. Unsymmetric Tchebysheff-type Straight-line Mechanisms / W. Funk, V. Gassmann // Proc. Tenth World Congress on the Theory of Mechanisms and Machines, vol. 1 Oulu, Finland, 1999, С. 222-226. 6. Gassmann V. Synthese von Geradführungen mit ebenen Viergelenkgetrieben, Hamburg, Universitat der Bundeswehr Diss., 2000. - 102 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Шарнірно-важільний механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді трикутника, дві вершини якого шарнірно зв'язані з кривошипом та коромислом, а за шатунну точку, що знаходиться на третій вершині шатуна, прийнято точку Болла, з можливістю опису нею кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому ця шатунна точка шарнірно зв'язана з повзуном, який має напрямну, що паралельна прямолінійній ділянці шатунної кривої та утворює поступальну пару з пазом вихідної ланкикоромисла, за центр обертання якого прийнято полюс повороту шатунної площини, який відрізняється тим, що механізм виконано з можливістю зміни положення шатунної точки з положення точки Болла у положення точки розпрямлення 5-го порядку, при цьому зміниться тривалість зупинки вихідної ланки, її максимальний розмах та кут нахилу у фазі зупинки. 2 UA 113778 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: регульованими, шестиланковий, механізм, нахилу, кутом, зупинки, тривалістю, важільний, ланки, вихідної, максимальним, фазі, розмахом
Код посилання
<a href="https://ua.patents.su/5-113778-vazhilnijj-shestilankovijj-mekhanizm-z-regulovanimi-trivalistyu-zupinki-vikhidno-lanki-maksimalnim-rozmakhom-ta-kutom-nakhilu-vikhidno-lanki-u-fazi-zupinki.html" target="_blank" rel="follow" title="База патентів України">Важільний шестиланковий механізм з регульованими тривалістю зупинки вихідної ланки, максимальним розмахом та кутом нахилу вихідної ланки у фазі зупинки</a>
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Харжевський В'ячеслав Олександрович, Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: регульованою, ланки, механізм, зупинки, тривалістю, шарнірно-важільний, вихідної
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки
Номер патенту: 66042
Опубліковано: 15.04.2004
Автори: Кіницький Ярослав Тимофійович, Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: шарнірно-важільний, регульованими, зупинками, ланки, вихідної, механізм, двома
Формула / Реферат:
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки, який має основу, на якій встановлений кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з повзуном, що має напрямну, яка паралельна прямолінійним ділянкам шатунної кривої і може рухатись вздовж іншої напрямної, що не паралельна цим ділянкам, який відрізняється тим, що...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок
Номер патенту: 51985
Опубліковано: 16.12.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: ланок, вихідних, тривалістю, механізм, шарнірно-важільний, зупинки, регульованою
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок містить основу, на якій встановлені кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, а іншим плечем за допомогою одного або декількох шатунів - з повзунами, який відрізняється тим, що довжина шатунів регульована.
Зубчасто-важільний механізм з зупинкою вихідної ланки
Номер патенту: 83211
Опубліковано: 27.08.2013
Автори: Музичишин Сергій Володимирович, Кошель Сергій Олександрович
МПК: F16H 21/00
Мітки: механізм, зупинкою, вихідної, ланки, зубчасто-важільний
Формула / Реферат:
1. Зубчасто-важільний механізм з зупинкою вихідної ланки, що містить корпус, в якому встановлені ведучий та ведений вали, на кожному з яких встановлена пара зубчастих коліс, в кожній по одному колесу закріплено жорстко та з їх зачепленням між собою, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений з зубчастим колесом ведучого вала, та два шатуни, шарнірно з'єднаних між собою і з відповідними кривошипами, який...
Кулісно-важільний механізм з зупинками
Номер патенту: 44619
Опубліковано: 15.02.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: механізм, кулісно-важільний, зупинками
Формула / Реферат:
Кулісно-важільний механізм із зупинками, що має основу, на якій шарнірно встановлені кривошип і коромисло, зв'язані шатуном у вигляді двоплечевого важеля, один кінець якого зв'язаний з повзуном, що рухається вздовж паза куліси, центр шарніра якої знаходиться на рухомій основі, яка може змінювати своє положення паралельно прямолінійній ділянці шатунної кривої з можливістю фіксації її положення, який відрізняється тим, що положення центра...
Попередній патент: Зворотний механізм пістолета
Наступний патент: Спосіб діагностики кишкової непрохідності
Випадковий патент: Пристрій для обробляння пластичних матеріалів