Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестикратного вузла інтерполяції шатунної площини
Формула / Реферат
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестигранного вузла інтерполяції шатунної площини, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому всі три шарніри шатуна лежать на одній прямій, який відрізняється тим, що за шатунну точку механізму приймається шестикратний вузол інтерполяції шатунної площини, який відповідає довжині другого плеча шатуна, що визначається за формулою:
k=1297204,7063r7-2142515,5075r6+1518594,2697r5-598127,17349r4+141319,90764r3-20015,719408r2+1574,20764r-52,98513, де r - довжина кривошипа механізму, що приймається в межах r=(0,2…0,3)d, d - відстань між осями нерухомих шарнірів, що вибирається конструктивно, при цьому довжина шатуна та коромисла розраховуються відповідно:
b=264956,81424r7-437427,93803r6+309936,38656r5-122038,30623r4+28828,764201r5-4083,86369r2+324,55641r-10,79556;
с=-264910,12891r7+437344,52302r6-309867,37106r5+122001,76718r4-28813,85539r3+4078,09267r2-318,51415r+11,79735, при цьому початок прямолінійної ділянки шатунної кривої відповідає куту повороту кривошипа jПОЧ=151,3953+45,7972r-455,5944r2, що відраховується проти годинникової стрілки від додатного напрямку осі абсцис, а довжина прямолінійної ділянки шатунної кривої механізму визначається як
L=72,4r3-42,636r2+11,879r-0,7127.
Текст
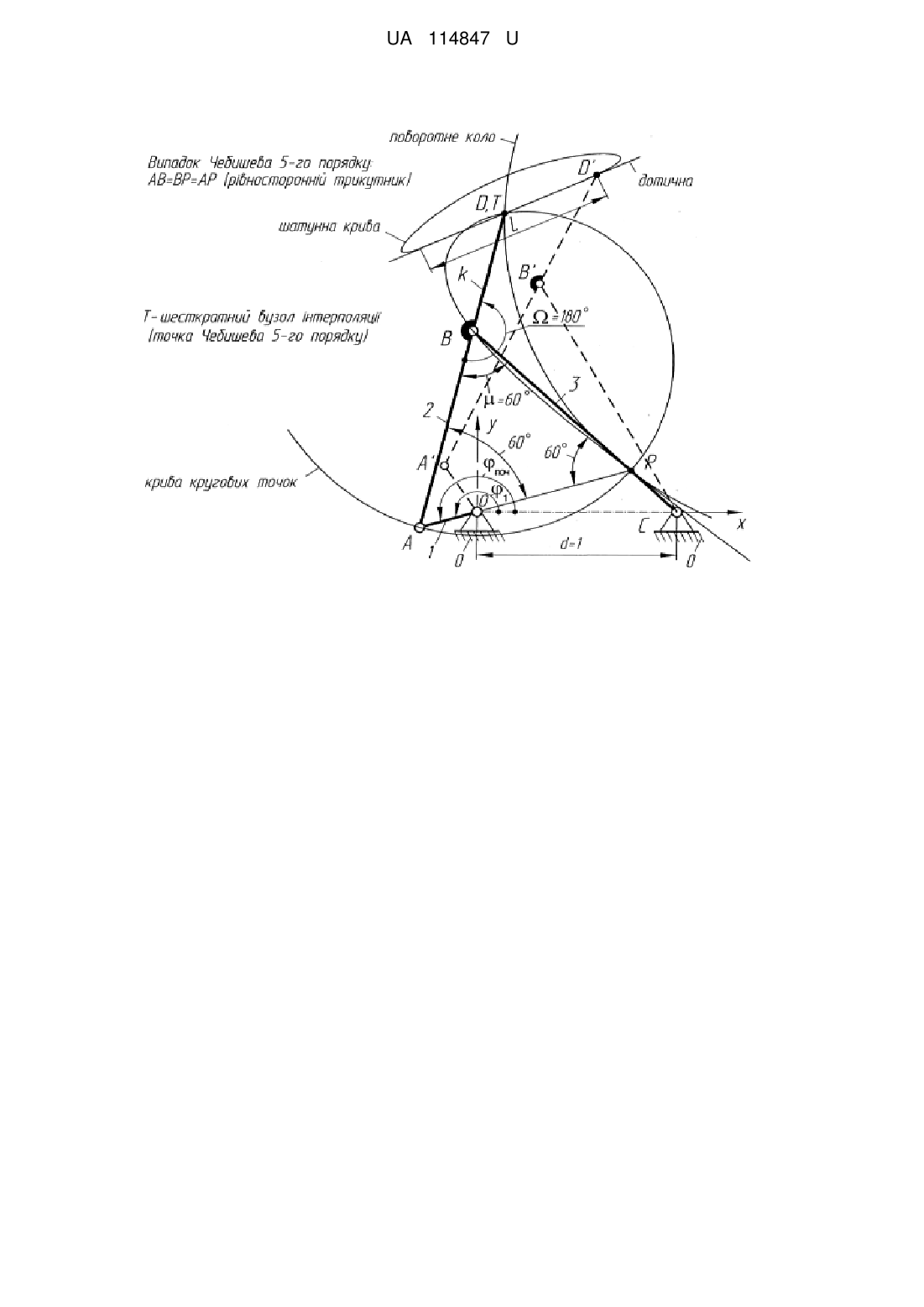
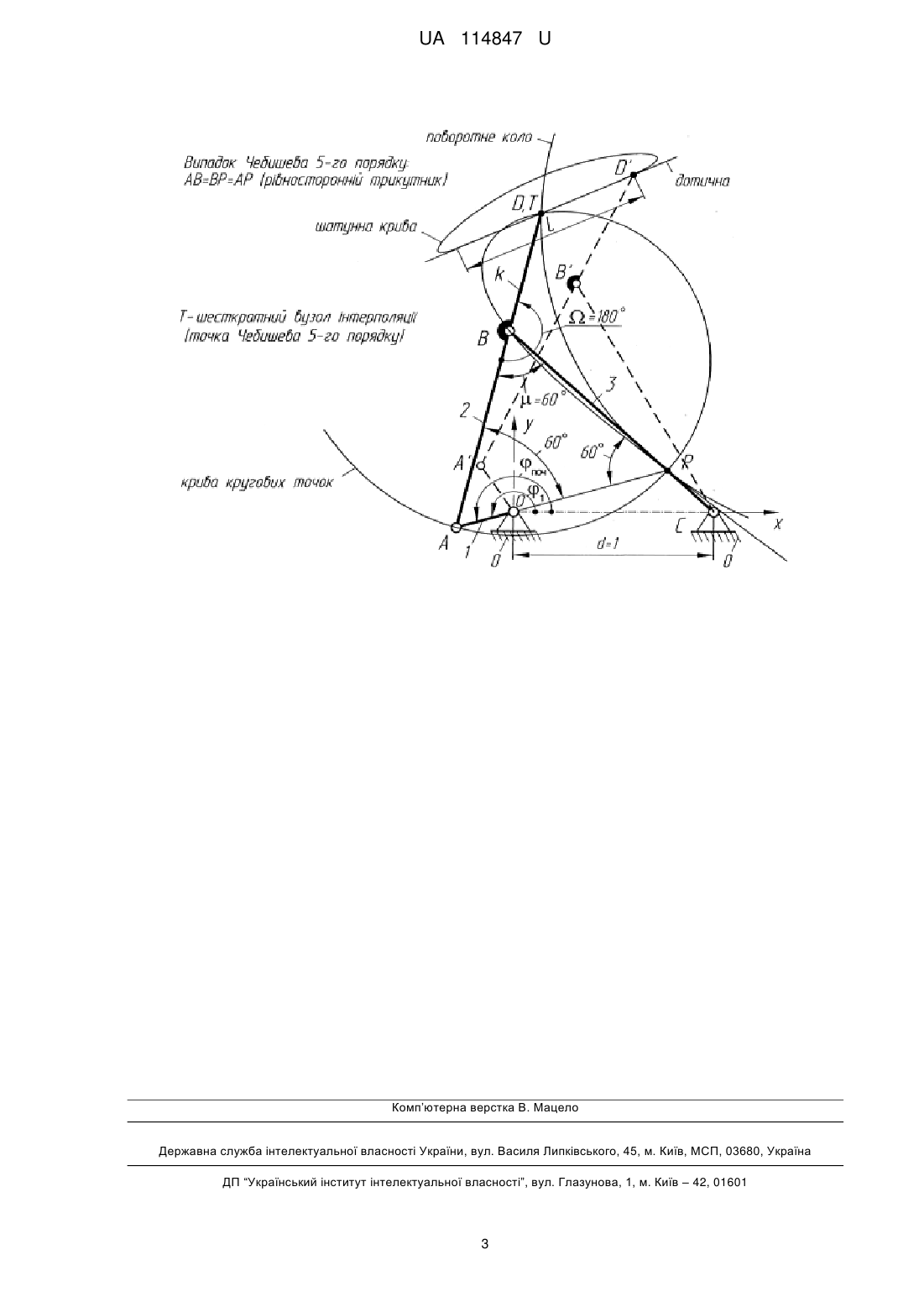
Реферат: Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестикратного вузла інтерполяції шатунної площини, має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля. Одне плече важеля шарнірно зв'язано з кривошипом та коромислом. Інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії. Всі три шарніри шатуна лежать на одній прямій. За шатунну точку механізму приймається шестикратний вузол інтерполяції шатунної площини, який відповідає довжині другого плеча шатуна. UA 114847 U (54) ШАРНІРНИЙ ЧОТИРИЛАНКОВИЙ ПРЯМОЛІНІЙНО-НАПРЯМНИЙ МЕХАНІЗМ, ПОБУДОВАНИЙ З ВИКОРИСТАННЯМ ШЕСТИКРАТНОГО ВУЗЛА ІНТЕРПОЛЯЦІЇ ШАТУННОЇ ПЛОЩИНИ UA 114847 U UA 114847 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, а саме до плоских важільних механізмів, в яких необхідно забезпечити наближений прямолінійно-напрямний рух на певній ділянці траєкторії деякої шатунної точки. Відомо, що існує два основних напрямки у синтезі плоских прямолінійно-напрямних механізмів: використання способів найкращого наближення за Чебишевим та використання способів кінематичної геометрії. Відомими аналогами є важільні прямолінійно-напрямні механізми Чебишева, зокрема з симетричною формою шатунної кривої [1, с. 675], [3], а також несиметричні [5, 6], в яких шатунна точка наближено описує на деякій ділянці пряму лінію, причому положення цієї точки на шатуні вибирається з умов найкращого наближення за Чебишевим, що полягають у наявності максимальної кількості вузлів інтерполяції з прямою лінією (для шарнірного чотириланкового механізму - шість) з рівномірним характером зміни відхилень на ділянці наближення. Випадок, коли всі шість точок збігаються в одну отримав назву випадку Чебишева 5-го порядку [1, 2], а відповідна точка, яка вибирається при цьому за шатунну точку механізму точка Чебишева 5-го порядку, яка є шестикратним вузом інтерполяції шатунної площини, оскільки в даній точці збігаються не лише шатунна крива та пряма лінія, але й п'ять їх перших похідних, тобто забезпечується дотик 5-го порядку, що відповідає математично найвищій точності наближення, яка може буди забезпечена для шарнірного чотириланкового механізму. Найближчим аналогом до корисної моделі є шарнірний чотириланковий прямолінійнонапрямний механізм, побудований на основі шестикратного вузла інтерполяції [1, с. 682, рис. 632], який забезпечує симетричну форму шатунної кривої та лише один варіант розмірів механізму. В основу корисної моделі поставлена задача розширення областей існування прямолінійнонапрямних механізмів на основі шарнірного чотириланкового механізму за рахунок використанням шестикратних вузлів інтерполяції, що забезпечують несиметричну форму шатунної кривої. Поставлена задача вирішується тим, що як шатунну точку шарнірного чотириланкового механізму приймається особлива точка шатунної площини, що визначається як перетин кривої кругових точок та поворотного кола в положенні механізму, коли рухомі шарніри механізму утворюють рівносторонній трикутник з полюсом миттєвого обертання шатунної площини. Корисна модель пояснюється кресленням, де зображено шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестикратного вузла інтерполяції шатунної площини. Шарнірний чотириланковий механізм, що має основу 0, на якій встановлено кривошип 1, коромисло 3 і шатун 2 у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом 1 та коромислом 3, а інше плече виконано з можливістю опису його шатунною точкою D кривої, яка на частковій ділянці траєкторії, довжиною L наближається до прямої лінії, причому всі три шарніри А, В, D шатуна 2 лежать на одній прямій, а за шатунну точку D механізму приймається шестикратний вузол інтерполяції Т шатунної площини, що відповідає довжині другого плеча шатуна BD: 7 6 5 4 3 k=1297204,7063r -2142515,5075r +1518594,2697r -598127,17349r +141319,90764r 2 20015,719408r +1574,20764r-52,98513, (1)| де r=lOA - довжина кривошипа механізму, що приймається в межах від 0,2 до 0,3 від відстані між осями нерухомих шарнірів d=lOC механізму, яка вибирається конструктивно. Таким чином, всі розміри механізму є відносними, за модуль довжини прийнято відстань d між осями нерухомих шарнірів. Довжина шатуна b=lAB та коромисла с=lBC приймаються відповідно 7 6 5 4 3 b=264956,81424r -437427,93803r +309936,38656r -122038,30623r +28828,764201r 2 4083,86369r +324,55641r-10,79556; (2) 7 6 5 4 с=-264910,12891r +437344,52302r -309867,37106r +122001,76718r 3 2 28813,85539r +4078,09267r -318,51415r+11,79735. (3) Початок прямолінійної ділянки шатунної кривої визначається кутом повороту кривошипа φ 1, що відраховується проти годинникової стрілки від додатного напрямку осі абсцис: 2 φПОЧ=151,3953+45,7972r-455,5944r . (4) Для визначення величини прямолінійної ділянки шатунної кривої було використано числовий спосіб з використанням коефіцієнта граничної швидкості вихідної ланки, що описаний у роботі [4]. Таким чином, довжина прямолінійної ділянки визначається наступним чином: 3 2 L=72,4r -42,636r +11,879r-0,7127. (5) 1 UA 114847 U 5 10 15 Встановлено, що всі зазначені прямолінійно-напрямні механізми, довжина кривошипа яких змінюється в межах від 0,2 до 0,3, забезпечують максимальне відхилення на інтервалі наближення не більше, ніж Е=0,015. Джерело інформації: 1. Артоболевский И.И. Синтез плоских механизмов./ И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов - М.: Физматгиз, 1959. - 1084 с. 2. Геронимус Я.Л. Геометрический аппарат теории синтеза плоских механизмов / Я.Л. Геронимус. - М.: Гос. издательство физ.-мат. литературы, 1962. - 400 с. 3. Киницкий Я.Т. Шарнирные механизмы Чебышева с выстоем выходного звена / Я.Т. Киницкий. - К.: Вища школа, 1990. - 232 с. 4. Харжевський В.О. Синтез важільних механізмів із зупинкою вихідної ланки методами кінематичної геометрії: монографія / В.О. Харжевський. - Хмельницький: РВЦ ХНУ, 2015. - 223 с. 5. Funk W. Unsymmetric Tchebysheff-type Straight-line Mechanisms / W. Funk, V. Gassmann // Proc. Tenth World Congress on the Theory of Mechanisms and Machines, vol. 1 Oulu, Finland, 1999. - С. 222-226. 6. Gassmann V. Synthese von Geradfuhrungen mit ebenen Viergelenkgetrieben, Hamburg, Universitat der Bundeswehr Diss., 2000. - 102 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестикратного вузла інтерполяції шатунної площини, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому всі три шарніри шатуна лежать на одній прямій, який відрізняється тим, що за шатунну точку механізму приймається шестикратний вузол інтерполяції шатунної площини, який відповідає довжині другого плеча шатуна, що визначається за формулою: 7 6 5 4 3 k=1297204,7063r -2142515,5075r +1518594,2697r -598127,17349r +141319,90764r 2 20015,719408r +1574,20764r-52,98513, де r - довжина кривошипа механізму, що приймається в межах r=(0,2…0,3)d, d - відстань між осями нерухомих шарнірів, що вибирається конструктивно, при цьому довжина шатуна та коромисла розраховуються відповідно: 7 6 5 4 5 b=264956,81424r -437427,93803r +309936,38656r -122038,30623r +28828,764201r 2 4083,86369r +324,55641r-10,79556; 7 6 5 4 3 2 с=-264910,12891r +437344,52302r -309867,37106r +122001,76718r -28813,85539r +4078,09267r 318,51415r+11,79735, при цьому початок прямолінійної ділянки шатунної кривої відповідає куту 2 повороту кривошипа ПОЧ=151,3953+45,7972r-455,5944r , що відраховується проти годинникової стрілки від додатного напрямку осі абсцис, а довжина прямолінійної ділянки шатунної кривої механізму визначається як 3 2 L=72,4r -42,636r +11,879r-0,7127. 2 UA 114847 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: інтерполяції, прямолінійно-напрямний, чотириланковий, шестикратного, площині, механізм, шатунної, побудований, вузла, використанням, шарнірний
Код посилання
<a href="https://ua.patents.su/5-114847-sharnirnijj-chotirilankovijj-pryamolinijjno-napryamnijj-mekhanizm-pobudovanijj-z-vikoristannyam-shestikratnogo-vuzla-interpolyaci-shatunno-ploshhini.html" target="_blank" rel="follow" title="База патентів України">Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням шестикратного вузла інтерполяції шатунної площини</a>
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 4-го порядку
Номер патенту: 108871
Опубліковано: 10.08.2016
Автор: Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: використанням, розпрямлення, шарнірний, чотириланковий, прямолінійно-напрямний, 4-го, побудований, точки, механізм, порядку
Формула / Реферат:
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину...
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки чебишева
Номер патенту: 108872
Опубліковано: 10.08.2016
Автор: Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: прямолінійно-напрямний, шарнірний, чебишева, чотириланковий, механізм, використанням, побудований, точки
Формула / Реферат:
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка Чебишева, яка визначається для заданих довжин кривошипа, шатуна та...
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 5-го порядку
Номер патенту: 111501
Опубліковано: 10.11.2016
Автор: Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: використанням, 5-го, побудований, прямолінійно-напрямний, чотириланковий, точки, розпрямлення, порядку, шарнірний, механізм
Формула / Реферат:
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 5-го порядку, яка визначається як точка перетину...
Кулісно-важільний прямолінійно-напрямний механізм
Номер патенту: 86369
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: кулісно-важільний, прямолінійно-напрямний, механізм
Формула / Реферат:
Кулісно-важільний прямолінійно-напрямний механізм, що містить два важелі, прямокутний важіль, хрестоподібний повзун, діаду повзунів, який відрізняється тим, що додатково оснащений горизонтальною лінійкою, додатковою діадою повзунів, траверзою, повзуном і Т-подібним повзуном зі стопорними гвинтами, причому траверза встановлена на першому важелі за допомогою Т-подібного повзуна, другий важіль за допомогою повзуна встановлений на першому важелі...
Чотириланцюговий шарнірний кривошипно-коромисловий механізм
Номер патенту: 8916
Опубліковано: 15.08.2005
Автор: Кононенко Володимир Іванович
МПК: F16H 21/52
Мітки: механізм, чотириланцюговий, кривошипно-коромисловий, шарнірний
Формула / Реферат:
Чотириланцюговий шарнірний кривошипно-коромисловий механізм, що складається із ланцюгів кривошипа, шатуна, коромисла, який відрізняється тим, що розмір ланцюгів механізму відповідає вимогам: АВ=CD; ВС=AD=2АВ=2CD, де: АВ - кривошип; CD - коромисло; ВС - шатун; AD - фіксована опора.
Попередній патент: Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки на основі точки розпрямлення 5-го порядку
Наступний патент: Спосіб профілактики перинатальних ускладнень у вагітних із передчасним відшаруванням нормально розташованої плаценти в анамнезі
Випадковий патент: Спосіб визначення показань для застосування антиоксидантів у хворих із захворюваннями органів травлення