Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 4-го порядку


Формула / Реферат
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 4-го порядку зі своїми дотичними колами, за формулами:
![]() ;
; ![]() ,
, ![]() ,
,
де ![]() - коефіцієнти кривої, що є геометричним місцем точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами;
- коефіцієнти кривої, що є геометричним місцем точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами; ![]() - прискорення полюса миттєвого обертання шатунної площини.
- прискорення полюса миттєвого обертання шатунної площини.
Текст
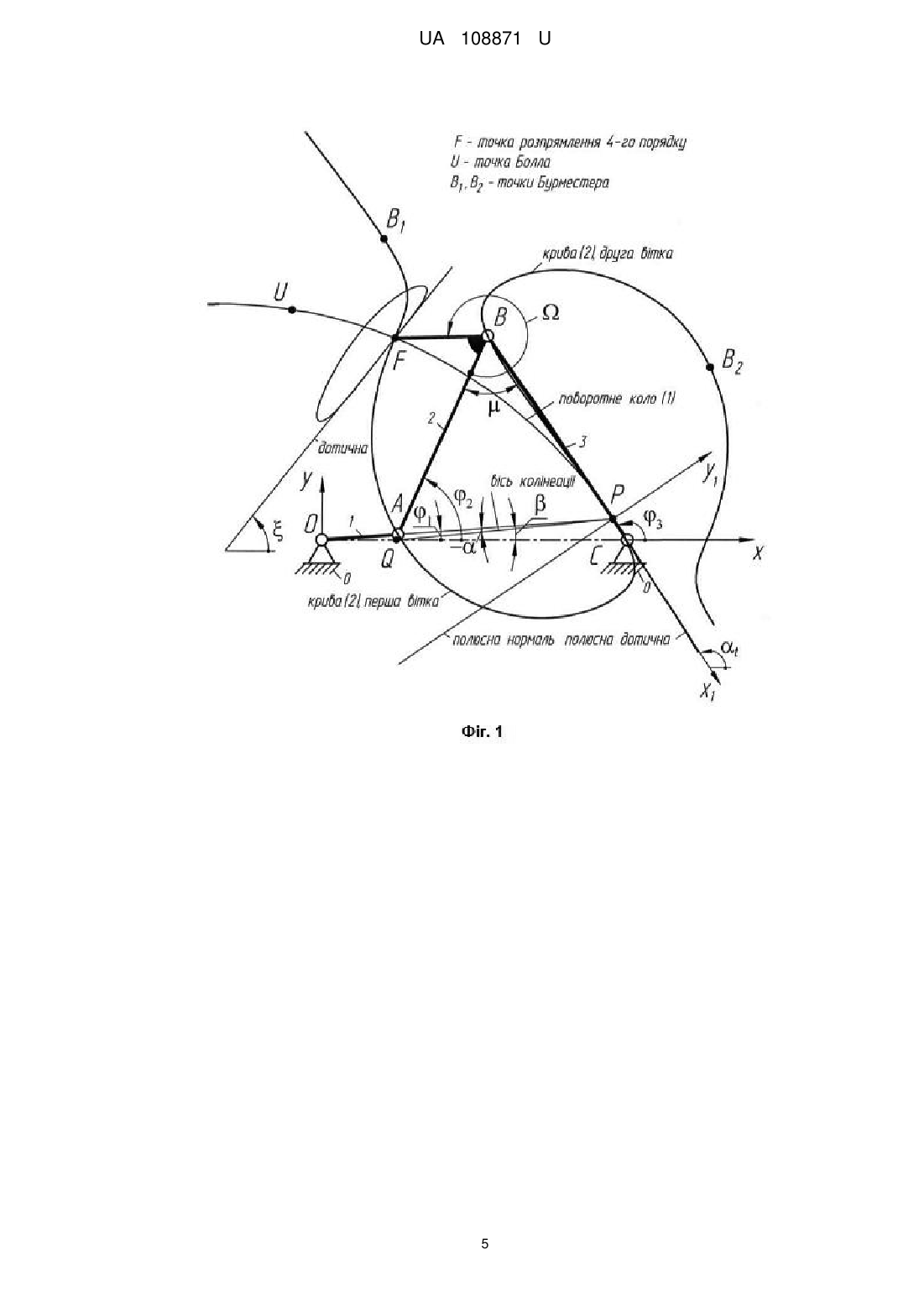
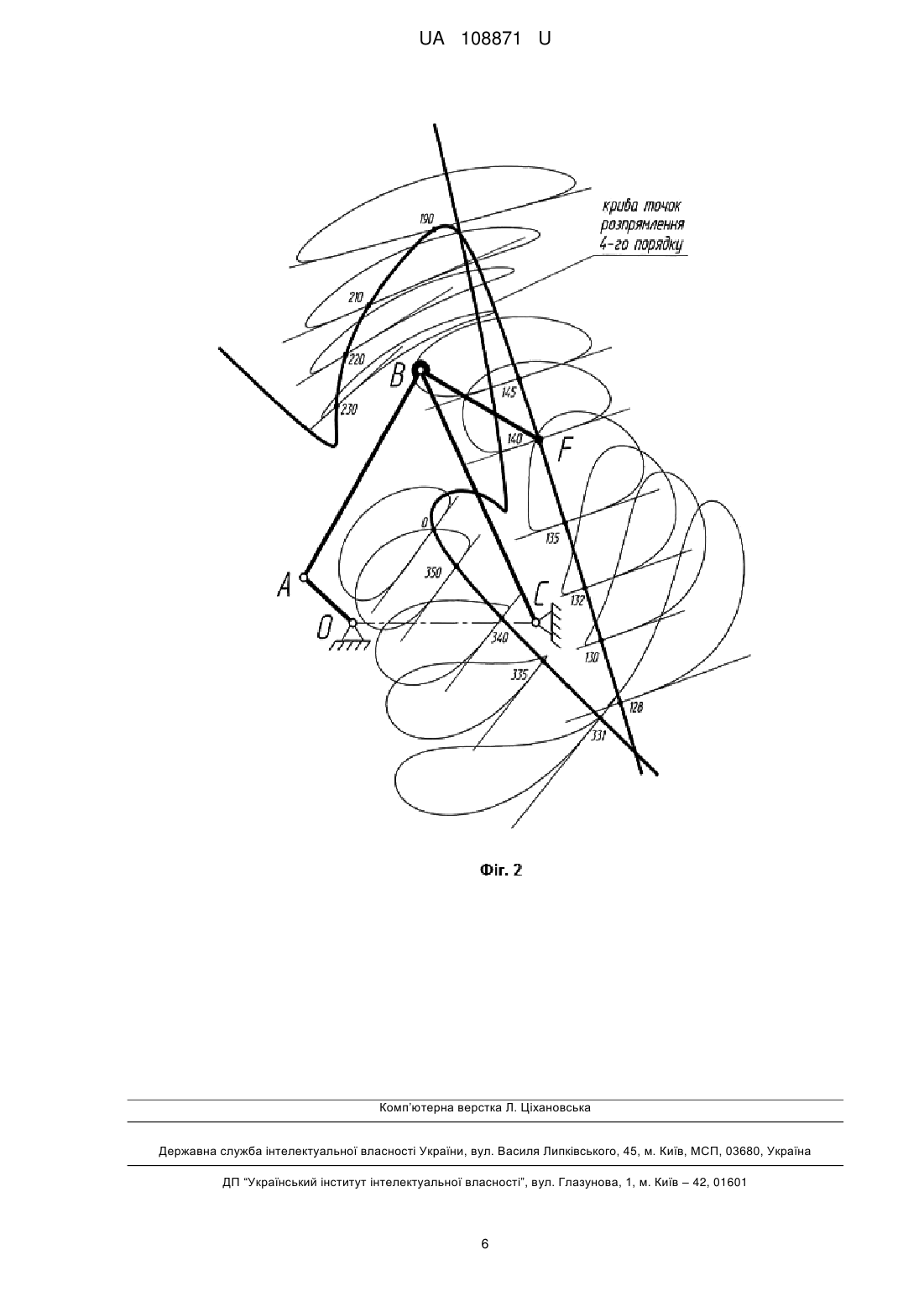
Реферат: Шарнірний чотириланковий механізм має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом. Інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії. За шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 4-го порядку зі своїми дотичними колами, за формулами: xF ny " 0 2 n 1 ; yF nx , n m4 m1 . m2 m5 UA 108871 U (54) ШАРНІРНИЙ ЧОТИРИЛАНКОВИЙ ПРЯМОЛІНІЙНО-НАПРЯМНИЙ МЕХАНІЗМ, ПОБУДОВАНИЙ З ВИКОРИСТАННЯМ ТОЧКИ РОЗПРЯМЛЕННЯ 4-ГО ПОРЯДКУ UA 108871 U UA 108871 U 5 10 15 20 25 30 Корисна модель належить до машинобудування, а саме до плоских важільних механізмів, в яких необхідно забезпечити наближений прямолінійно-напрямних рух на певній ділянці траєкторії деякої шатунної точки. Відомо, що існує два основних напрямки у синтезі плоских прямолінійно-напрямних механізмів: використання методів найкращого наближення за Чебишевим та використання методів кінематичної геометрії. Відомі важільні прямолінійно-напрямні механізми Чебишева, зокрема з симетричною формою шатунної кривої [1. - С. 675], [2], а також несиметричні [4], [5], в яких шатунна точка наближено описує на деякій ділянці пряму лінію, причому положення цієї точки на шатуні вибирається з умов найкращого наближення за Чебишевим, що полягають у наявності максимальної кількості вузлів інтерполяції з прямою лінією (для шарнірного чотириланкового механізму - шість) з рівномірним характером зміни відхилень на ділянці наближення. Відомі також важільні прямолінійно-напрямні механізми, в яких за шатунну точку вибирається особлива точка, що існує в кожному положенні шатунної площини - точка Болла [1. - С. 1068, рис. 864] (прототип), яка визначається методами кінематичної геометрії як точка перетину поворотного кола, що є геометричним місцем точок розпрямлення або перегинів шатунних кривих, з кривою кругових точок, що представляє собою геометричне місце точок, які забезпечують дотик не нижче 3-го порядку зі своїми дотичними колами. Таким чином, точки Болла дозволяють отримувати прямолінійно-напрямні механізми з різними довжинами прямолінійних ділянок. Форма шатунних кривих таких механізмів в загальному випадку є несиметричною. Однією з сучасних наукових робіт, в якій розглядається проектування важільних прямолінійно-напрямних механізмів на базі точок Болла є, наприклад, монографія вчених Уанга Д. та Уанга У. [6. - С. 160]. В основу даної корисної моделі поставлена задача - розширення областей існування прямолінійно-напрямних механізмів на основі шарнірного чотириланкового механізму. Поставлена задача вирішується у шарнірному чотириланковому механізмі, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 4-го порядку зі своїми дотичними колами, за формулами: ny " 0 m 4 m1 , m 2 m5 n 1 де m1...m5 - коефіцієнти кривої, що є геометричним місцем точок, які забезпечують дотик не xF 35 40 45 50 55 2 ; y F nx , n нижче 4-го порядку зі своїми дотичними колами; y " - прискорення полюса миттєвого обертання 0 шатунної площини. Як шатунна точка шарнірного чотириланкового механізму приймається інша особлива точка, що визначається за допомогою методів кінематичної геометрії, а саме - точка розпрямлення 4го порядку, що в загальному випадку визначається як точка перетину поворотного кола (1), які є геометричним місцем розпрямлення або перегинів шатунних кривих, що описують дані точки, з кривою (2), що є геометричним місцем точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами. Фіг. 1, 2 ілюструють запропоновану корисну модель: Фіг. 1. - Розрахункова схема прямолінійно-напрямного шарнірного чотириланкового механізму. Фіг. 2. - Крива точок розпрямлення 4-го порядку. Шарнірний чотириланковий механізм (Фіг. 1) має основу 0, на якій встановлено кривошип 1, коромисло 3 і шатун 2 у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом 1 та коромислом 3, а інше плече виконано з можливістю опису його шатунною точкою F кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 4-го порядку зі своїми дотичними колами. Точки розпрямлення 4-го порядку, що приймаються як шатунні точки, визначаються в загальному випадку для будь-якого положення шатунної площини шарнірного чотириланкового механізму. Якщо, відповідно до рекомендацій [1. - С. 1060], прийняти кутову швидкість обертання шатунної площини 1, тоді рівняння поворотного кола (яке ще називають колом перегинів [1, стор. 1021]) в неявному вигляді запишеться наступним чином: 1 UA 108871 U x2 y2 y" y 0 , 0 (1) де y " - прискорення полюса Р миттєвого обертання шатунної площини механізму. 0 Рівняння кривої (в неявному вигляді), що представляє собою геометричне місце точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами: 5 10 15 x 2 y 2 m 3 m 4 x m 5 y y " ym1x m 2 y m 3 0 , 0 (2) де m1...m5 - коефіцієнти кривої. Якщо переписати рівняння (2) в параметричному вигляді, тоді цю криву можна побудувати. В цьому випадку виявилось, його корені будуть визначатись квадратним рівнянням і, як видно з прикладу, зображеного на Фіг. 1, крива (2) складається з двох віток. Таким чином, якщо точка розпрямлення 4-го порядку, що визначається як точка перетину кривих (1) та (2), буде прийнята за шатунну точку механізму, в результаті вона буде описувати шатунну криву, що на деякій своїй ділянці в околі цієї точки буде наближатись до прямої лінії. Алгоритм проектування механізму наступний. 1. Задаємось довжиною кривошипа r lOA шатуна b l AB , коромисла c lBC , а також кутом повороту кривошипа 1 для якого в шатунній площині будемо визначати точку розпрямлення 4-го порядку. За модуль довжини прийнято відстань між осями нерухомих шарнірів d l OC 1. Визначаємо координати точки A механізму (кінця кривошипа): X A r cos 1 ; YA r sin 1 , (3) 20 2. Обчислюємо кути 2 та 3 , що визначають положення відповідно шатуна b коромисла c механізму: 2 ; 3 , 25 (4) де arctgYA X A 1 ; . Для розрахунку шуканих кутів додатково визначаємо наступні величини: b 2 2 c 2 arccos 2b 2 2 2 , arccos b c 2bc ; 2 1 X A 2 YA , (5) 3. Обчислюємо координати точки B механізму: 30 XB 1 c cos 3 ; YB c sin 3 , (6) 4. Обчислюємо координати полюса P миттєвого обертання шатунної площини та миттєвого полюса Q відносного руху шатуна 2 та коромисла 3 механізму: XP tg 3 X Y XB YA ; YP XP tg1 ; X Q A B ; YQ 0 , YB YA tg 3 tg1 (7) 35 5. Визначаємо прискорення полюса P миттєвого обертання шатунної площини механізму: y" 0 40 l OP l OP l OA , l OA sin 3 (8) де кут нахилу осі колінеації arctgYP XP XQ , lOP XP cos 1 6. Визначаємо похідні 3-го порядку від переміщення полюса P миттєвого обертання шатунної площини механізму (швидкість зміни прискорення полюса миттєвого обертання): 2 UA 108871 U ' x '0' k 1k 22 k 2k 12 k k k 1k 21 ' , 3y " , y '0' 2 11 0 k 11k 22 k 12k 21 k 11k 22 k 12k 21 (9) Коефіцієнти, що входять у (9) визначаються наступним чином: k 11 x A x 2 y 2 ; k 12 y A x 2 y 2 ; k 1 3 y " x A y A , 0 A A A A 2 2 2 2 " k 21 x B x B y B ; k 22 y B x B y B ; k 2 3 y 0 x B y B , 5 10 де координати шарнірів A та B в повернутій системі координат x 1Py 1 : x A XP X A cos t YP YA sin t , y A YP YA cos t X A XP sin t , x B XP XB cos t YP YB sin t , y B YP YB cos t XB XP sin t . Кут нахилу полюсної дотичної: t 1 3 . 7. Визначаємо коефіцієнти m1...m5 , які входять у рівняння (2), що представляє собою геометричне місце точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами: ' ' m1 4 y '0' ; m 2 4 x '0' 6 y " ; m3 3 y " 0 0 m4 15 (10) ' ' K 1 4 x '0' y '0' 3y " 0 де K 1 K3 x ' 4 y '0' ; m 5 2 ; ' ' ' K 3 x '0' 3y " 4x '0' 6y " ; 4 y '0' 0 0 3y " 0 2 (11) , K 4x A K5y A K2y2 K3xA y A 2 ' ' ' A ; K 2 y '0' 4 x '0' 6 y " ; K 4 3x '0' y " ; 0 0 2 xA 2 2 ByA 2 2 2 x 2 yB K 2 x 2 xB x A xB K 4 x 2 yB xB y A K 5 A A A 2 ' ; K 5 3y '0' y " . 0 x A x B y B x A y A x B 8. Визначаємо точку розпрямлення 4-го порядку для заданого положення шатунної площини як точку перетину кривої (1) та кривої (2), у системі координат x 1Py 1 : xF ny " 0 ; n2 1 m m1 , n 4 m 2 m5 y F nx , (12) 20 9. Визначаємо координати точки розпрямлення 4-го порядку F у базовій системі координат xOy . Для цього проведемо перетворення системи координат за наступними формулами: XF XP x F cos t y F sin t , (13) YF YP y F cos t x F sin t , 25 10. Проектуємо важільний чотириланковий механізм, у якого довжина другого плеча шатуна k lBF та кут його злому визначає положення шатунної точки, як така буде прийнята знайдена точка розпрямлення 4-го порядку: k lBF 180 XF XB 2 YF YB 2 , YF YB 2 arctg X X B F (14) , 0 360 , 30 3 (15) UA 108871 U 11. Кут нахилу прямолінійної ділянки шатунної кривої визначається наступним чином: Y Y y " cos F 0 t arctg P X X y " sin F 0 t P 5 10 15 20 25 30 , (16) Слід відзначити, що оскільки кут , а також всі інші кути, значення яких визначаються через функцію arctg( x) , можуть змінюватись від 0 до 2 , для визначення їх величини слід скористатись не звичайною функцією арктангенса, а функцією arctan 2y, x , де y, x відповідно чисельник та знаменник у виразі (16). Ця функція є у більшості сучасних мов програмування. Як видно з прикладу, зображеного на Фіг. 1, знайдена особлива точка - точка розпрямлення 4-го порядку, не збігається з відомою точкою Болла або точками Бурместера та визначає нове сімейство важільних прямолінійно-напрямних механізмів. Точка розпрямлення 4-го порядку, так само, як і точка Болла, існує в кожному положенні механізму, причому в кожному положенні існує тільки одна така точка. Крива точок розпрямлення 4-го порядку (Фіг. 2) представляє собою геометричне місце точок розпрямлення 4-го порядку, які визначені для різних положень шатунної площини механізму. Як видно з Фіг. 2, проектування механізмів на основі таких особливих точок дозволяє отримати широкий спектр форм шатунних кривих з прямолінійними ділянками, причому, як видно, крива точок розпрямлення 4-го порядку не збігається з кривою Болла, що представляє собою геометричне місце точок Болла, визначених для різних положень механізму. Джерела інформації: 1. Артоболевский И.И. Синтез плоских механизмов./ И.И. Артоболевский, Н.И Левитский, С.А. Черкудинов. - М.: Физматгиз, 1959. - 1084 с. 2. Киницкий Я.Т. Шарнирные механизмы Чебышева с выстоем выходного звена / Я.Т. Киницкий. - К.: Вища школа, 1990. - 232 с. 3. Харжевський В.О. Синтез важільних прямолінійно-напрямних механізмів та механізмів із зупинкою вихідної ланки на базі шарнірного чотириланкового механізму: дис… канд. техн. наук: 05.02.02 / В.О. Харжевський; Хмельницький держ. ун-т. - Хмельницький, 2004. - 262 с. 4. Funk W. Unsymmetric Tchebysheff-type Straight-line Mechanisms / W. Funk, V. Gassmann // Proc. Tenth World Congress on the Theory of Mechanisms and Machines, vol. 1 Oulu, Finland, 1999. - С. 222-226. 5. Gassmann V. Synthese von Geradführungen mit ebenen Viergelenkgetrieben, Hamburg, Universität der Bundeswehr Diss., 2000. - 102 p. 6. Wang D. Kinematic Differential Geometry and Saddle Synthesis of Linkages /Wang D.,Wang W. - John Wiley & Sons Singapore Pte. Ltd., 2015. - 450 p. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 4-го порядку зі своїми дотичними колами, за формулами: xF ny " 0 2 ; yF nx , n m4 m1 , m2 m5 n 1 де m1...m5 - коефіцієнти кривої, що є геометричним місцем точок, які забезпечують дотик не нижче 4-го порядку зі своїми дотичними колами; y " - прискорення полюса миттєвого обертання 0 шатунної площини. 4 UA 108871 U 5 UA 108871 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: розпрямлення, чотириланковий, використанням, точки, механізм, шарнірний, 4-го, прямолінійно-напрямний, побудований, порядку
Код посилання
<a href="https://ua.patents.su/8-108871-sharnirnijj-chotirilankovijj-pryamolinijjno-napryamnijj-mekhanizm-pobudovanijj-z-vikoristannyam-tochki-rozpryamlennya-4-go-poryadku.html" target="_blank" rel="follow" title="База патентів України">Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 4-го порядку</a>
Кулісно-важільний прямолінійно-напрямний механізм
Номер патенту: 86369
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: прямолінійно-напрямний, кулісно-важільний, механізм
Формула / Реферат:
Кулісно-важільний прямолінійно-напрямний механізм, що містить два важелі, прямокутний важіль, хрестоподібний повзун, діаду повзунів, який відрізняється тим, що додатково оснащений горизонтальною лінійкою, додатковою діадою повзунів, траверзою, повзуном і Т-подібним повзуном зі стопорними гвинтами, причому траверза встановлена на першому важелі за допомогою Т-подібного повзуна, другий важіль за допомогою повзуна встановлений на першому важелі...
Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 105404
Опубліковано: 25.03.2016
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: точний, в.п, шарнірно-важільний, прямолінійно-напрямний, механізм, протиобертальний, сабліна
Формула / Реферат:
1. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, що містить структурні групи ланок, кожна з яких містить щонайменше дві рухливі ланки, що утворюють між собою щонайменше одну обертальну кінематичну пару першого роду і щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання вказаних обертальних кінематичних пар першого роду...
Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 102668
Опубліковано: 10.11.2015
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: сабліна, точний, прямолінійно-напрямний, в.п, шарнірно-важільний, механізм
Формула / Реферат:
1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого...
Прямолінійно-напрямний привод свердловинної насосної установки
Номер патенту: 104066
Опубліковано: 25.12.2013
Автори: Воробйов Микола Вадимович, Воробйов Микола Степанович, Івасюк Михайло Петрович
МПК: F04B 47/02, E21B 43/00
Мітки: привод, прямолінійно-напрямний, свердловинної, установки, насосної
Формула / Реферат:
Прямолінійно-напрямний привод свердловинної насосної установки, який містить електродвигун, редуктор, механізм перетворення обертового руху вихідного вала редуктора у зворотно-поступальний рух колони штанг і противаги, який відрізняється тим, що механізм перетворення обертового руху вихідного вала редуктора у зворотно-поступальний рух колони штанг виконаний у вигляді двох симетрично та співвісно розташованих точно прямолінійно-напрямних...
Механізм прямолінійного переміщення точки
Номер патенту: 104104
Опубліковано: 12.01.2016
Автори: Амбарцумянц Рубен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/18, F16H 21/00
Мітки: точки, переміщення, механізм, прямолінійного
Формула / Реферат:
Механізм прямолінійного переміщення точки, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що кривошип виконаний з двох важелів, жорстко закріплених між собою під кутом більше нуля градусів, але менше 180° і з'єднаний шарнірно з веденим кривошипом, аналогічним ведучому, шатунами однакової довжини, рівною довжині відстані між центрами обертання ведучого і веденого кривошипів, з ведучим...
Попередній патент: Ресорне підвішування двовісного візка вантажного вагона
Наступний патент: Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки чебишева
Випадковий патент: Зрошувальна установка комбайна з різцевими коронками