Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 5-го порядку

Формула / Реферат
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 5-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 5-го порядку зі своїми дотичними колами, за формулами:
де ![]() - похідні відповідно 2-го та 5-го порядків від переміщення полюса миттєвого обертання шатунної площини.
- похідні відповідно 2-го та 5-го порядків від переміщення полюса миттєвого обертання шатунної площини.
Текст
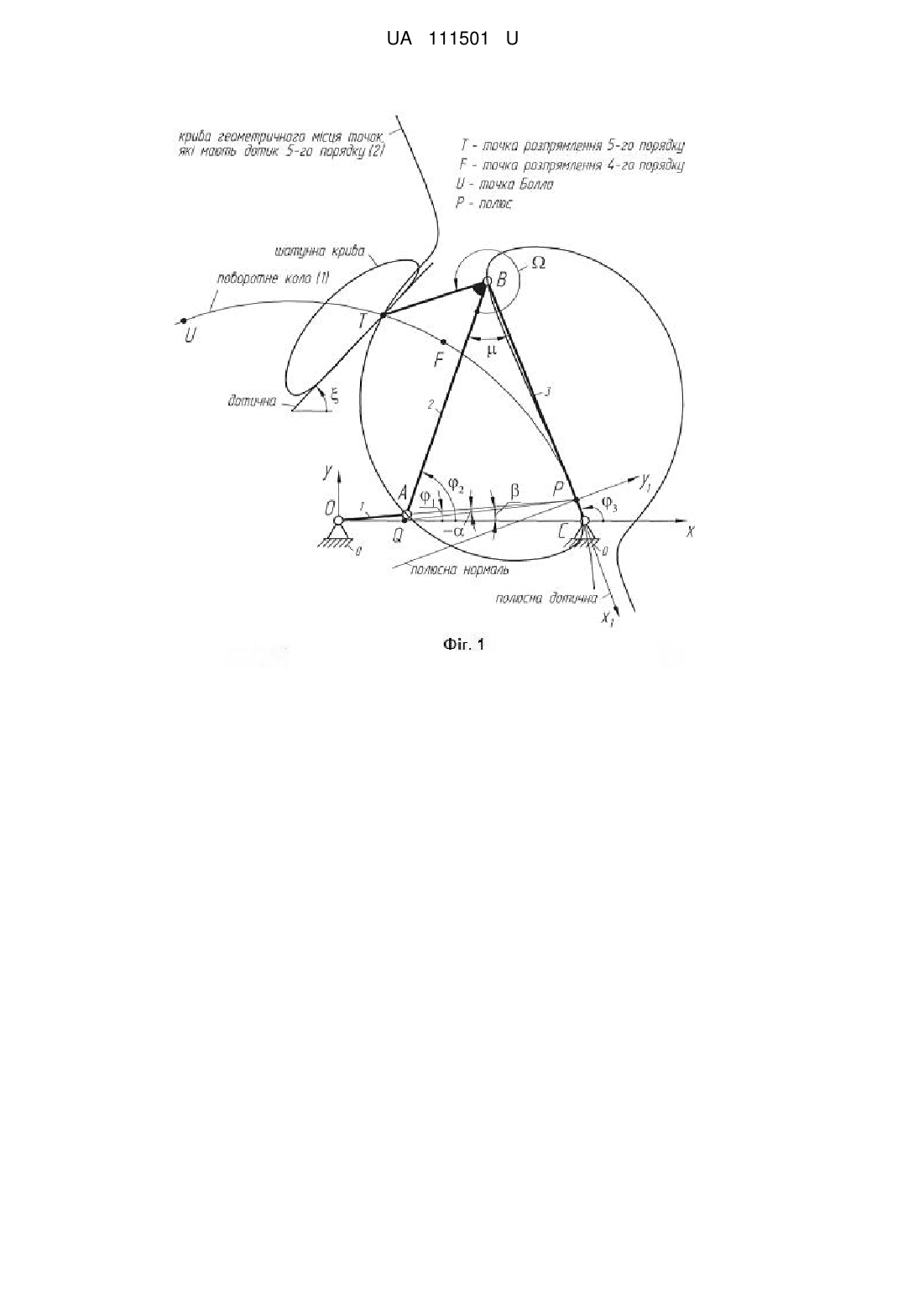
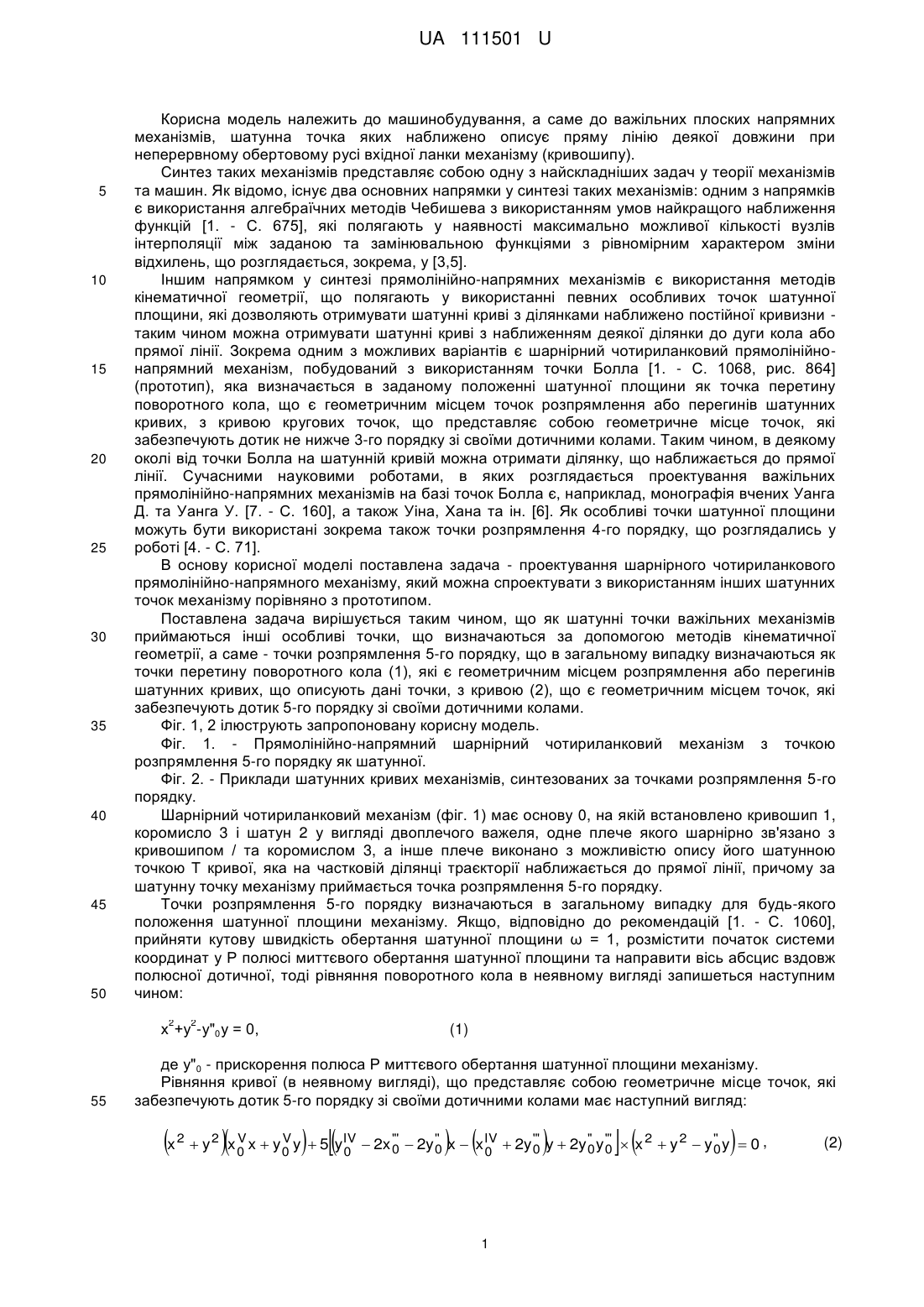
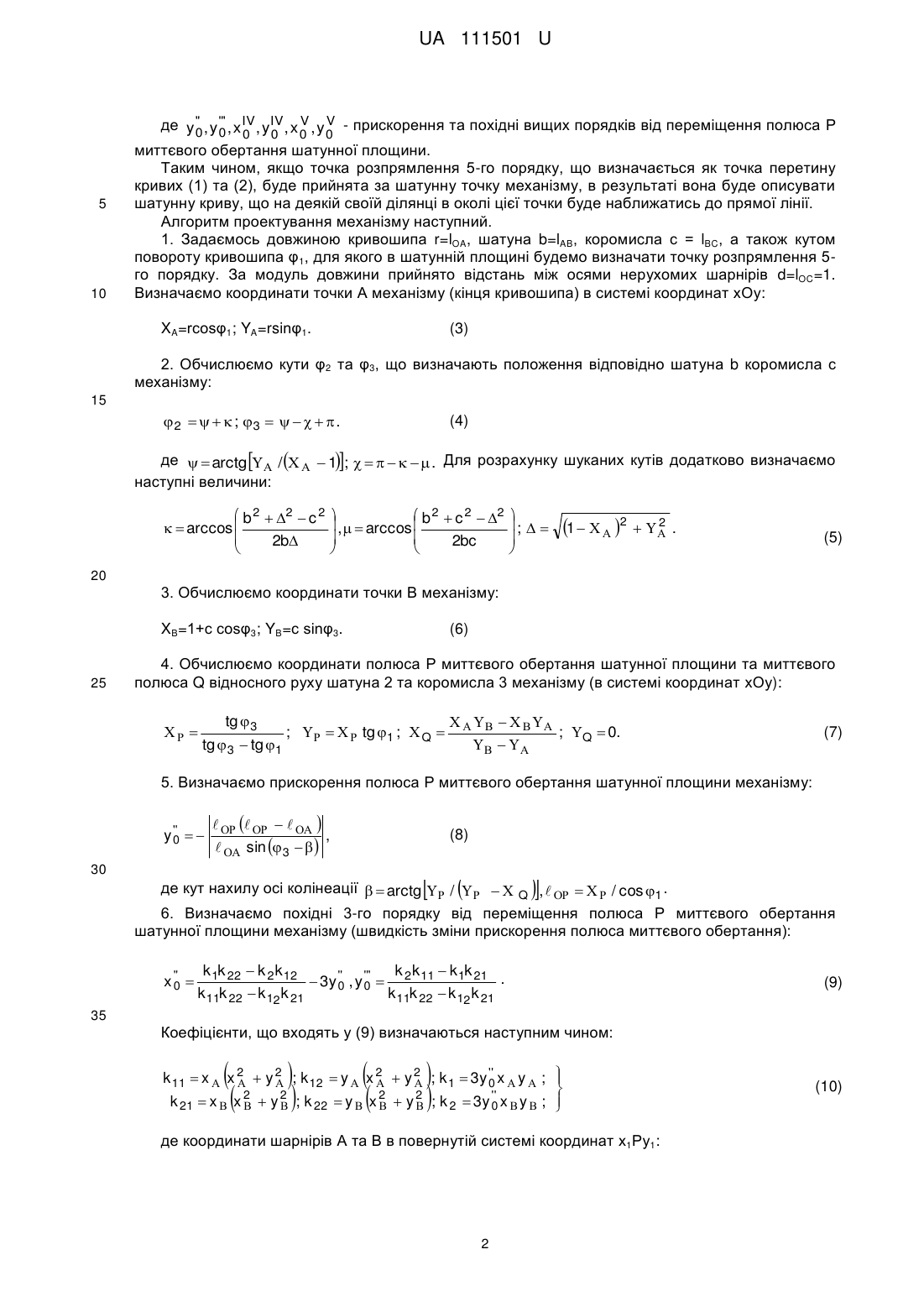
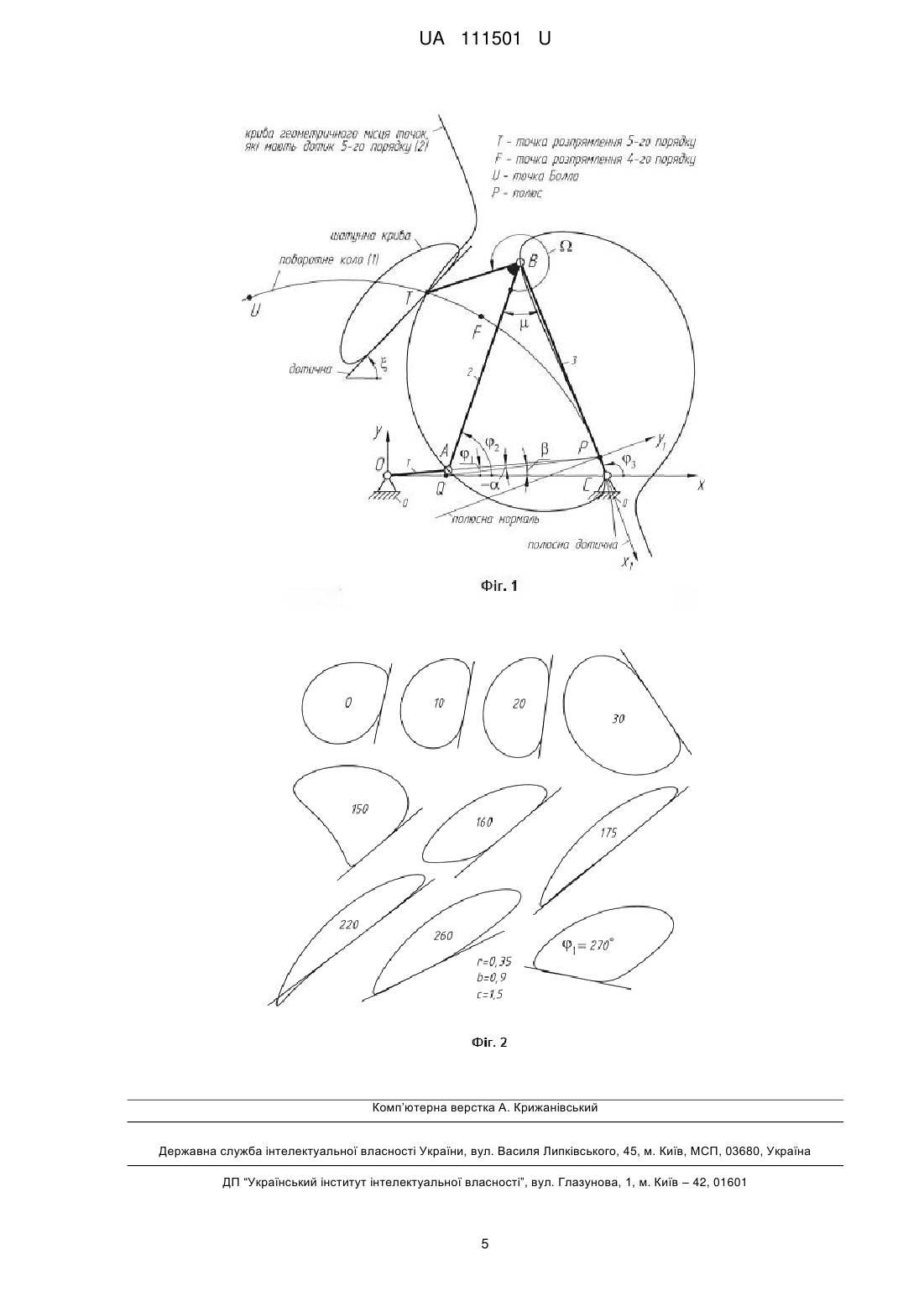
Реферат: Шарнірний чотириланковий механізм має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 5-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 5-го порядку зі своїми дотичними колами, за формулами: x де ' V V y '0 x 0 y 0 x y ; y V 2 V 2 0 0 ' V V y '0 , x 0 , y 0 - похідні x y ' V y '0 x 0 2 V 2 0 V 2 0 , відповідно 2-го та 5-го порядків від переміщення полюса миттєвого обертання шатунної площини. UA 111501 U (54) ШАРНІРНИЙ ЧОТИРИЛАНКОВИЙ ПРЯМОЛІНІЙНО-НАПРЯМНИЙ МЕХАНІЗМ, ПОБУДОВАНИЙ З ВИКОРИСТАННЯМ ТОЧКИ РОЗПРЯМЛЕННЯ 5-ГО ПОРЯДКУ UA 111501 U UA 111501 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до машинобудування, а саме до важільних плоских напрямних механізмів, шатунна точка яких наближено описує пряму лінію деякої довжини при неперервному обертовому русі вхідної ланки механізму (кривошипу). Синтез таких механізмів представляє собою одну з найскладніших задач у теорії механізмів та машин. Як відомо, існує два основних напрямки у синтезі таких механізмів: одним з напрямків є використання алгебраїчних методів Чебишева з використанням умов найкращого наближення функцій [1. - С. 675], які полягають у наявності максимально можливої кількості вузлів інтерполяції між заданою та замінювальною функціями з рівномірним характером зміни відхилень, що розглядається, зокрема, у [3,5]. Іншим напрямком у синтезі прямолінійно-напрямних механізмів є використання методів кінематичної геометрії, що полягають у використанні певних особливих точок шатунної площини, які дозволяють отримувати шатунні криві з ділянками наближено постійної кривизни таким чином можна отримувати шатунні криві з наближенням деякої ділянки до дуги кола або прямої лінії. Зокрема одним з можливих варіантів є шарнірний чотириланковий прямолінійнонапрямний механізм, побудований з використанням точки Болла [1. - С. 1068, рис. 864] (прототип), яка визначається в заданому положенні шатунної площини як точка перетину поворотного кола, що є геометричним місцем точок розпрямлення або перегинів шатунних кривих, з кривою кругових точок, що представляє собою геометричне місце точок, які забезпечують дотик не нижче 3-го порядку зі своїми дотичними колами. Таким чином, в деякому околі від точки Болла на шатунній кривій можна отримати ділянку, що наближається до прямої лінії. Сучасними науковими роботами, в яких розглядається проектування важільних прямолінійно-напрямних механізмів на базі точок Болла є, наприклад, монографія вчених Уанга Д. та Уанга У. [7. - С. 160], а також Уіна, Хана та ін. [6]. Як особливі точки шатунної площини можуть бути використані зокрема також точки розпрямлення 4-го порядку, що розглядались у роботі [4. - С. 71]. В основу корисної моделі поставлена задача - проектування шарнірного чотириланкового прямолінійно-напрямного механізму, який можна спроектувати з використанням інших шатунних точок механізму порівняно з прототипом. Поставлена задача вирішується таким чином, що як шатунні точки важільних механізмів приймаються інші особливі точки, що визначаються за допомогою методів кінематичної геометрії, а саме - точки розпрямлення 5-го порядку, що в загальному випадку визначаються як точки перетину поворотного кола (1), які є геометричним місцем розпрямлення або перегинів шатунних кривих, що описують дані точки, з кривою (2), що є геометричним місцем точок, які забезпечують дотик 5-го порядку зі своїми дотичними колами. Фіг. 1, 2 ілюструють запропоновану корисну модель. Фіг. 1. - Прямолінійно-напрямний шарнірний чотириланковий механізм з точкою розпрямлення 5-го порядку як шатунної. Фіг. 2. - Приклади шатунних кривих механізмів, синтезованих за точками розпрямлення 5-го порядку. Шарнірний чотириланковий механізм (фіг. 1) має основу 0, на якій встановлено кривошип 1, коромисло 3 і шатун 2 у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом / та коромислом 3, а інше плече виконано з можливістю опису його шатунною точкою Т кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 5-го порядку. Точки розпрямлення 5-го порядку визначаються в загальному випадку для будь-якого положення шатунної площини механізму. Якщо, відповідно до рекомендацій [1. - С. 1060], прийняти кутову швидкість обертання шатунної площини ω = 1, розмістити початок системи координат у Р полюсі миттєвого обертання шатунної площини та направити вісь абсцис вздовж полюсної дотичної, тоді рівняння поворотного кола в неявному вигляді запишеться наступним чином: 2 2 х +у -у"0у = 0, 55 (1) де у"0 - прискорення полюса Р миттєвого обертання шатунної площини механізму. Рівняння кривої (в неявному вигляді), що представляє собою геометричне місце точок, які забезпечують дотик 5-го порядку зі своїми дотичними колами має наступний вигляд: x 2 V V ' ' ' ' ' ' y 2 x 0 x y 0 y 5 yIV 2x '0' 2y '0 x x IV 2y '0' y 2y '0 y '0' x 2 y 2 y '0 y 0 , 0 0 1 (2) UA 111501 U 5 10 ' ' де y '0 , y '0' , x IV , yIV , x V , y V - прискорення та похідні вищих порядків від переміщення полюса Р 0 0 0 0 миттєвого обертання шатунної площини. Таким чином, якщо точка розпрямлення 5-го порядку, що визначається як точка перетину кривих (1) та (2), буде прийнята за шатунну точку механізму, в результаті вона буде описувати шатунну криву, що на деякій своїй ділянці в околі цієї точки буде наближатись до прямої лінії. Алгоритм проектування механізму наступний. 1. Задаємось довжиною кривошипа r=lOA, шатуна b=lAB, коромиcла с = lBC, а також кутом повороту кривошипа φ1, для якого в шатунній площині будемо визначати точку розпрямлення 5го порядку. За модуль довжини прийнято відстань між осями нерухомих шарнірів d=lOC=1. Визначаємо координати точки А механізму (кінця кривошипа) в системі координат хОу: XA=rcosφ1; YA=rsinφ1. (3) 2. Обчислюємо кути φ2 та φ3, що визначають положення відповідно шатуна b коромисла с механізму: 15 2 ; 3 . (4) де arctg / 1; . Для розрахунку шуканих кутів додатково визначаємо наступні величини: b 2 2 c 2 arccos 2b 2 2 2 , arccos b c 2bc ; 2 1 2 . (5) 20 3. Обчислюємо координати точки В механізму: XB=1+c cosφ3; YB=c sinφ3. 25 (6) 4. Обчислюємо координати полюса Р миттєвого обертання шатунної площини та миттєвого полюса Q відносного руху шатуна 2 та коромисла 3 механізму (в системі координат хОу): tg 3 ; tg 1 ; Q ; Q 0. tg 3 tg 1 (7) 5. Визначаємо прискорення полюса Р миттєвого обертання шатунної площини механізму: ' y '0 , sin 3 (8) 30 де кут нахилу осі колінеації arctg / Q , / cos 1 . 6. Визначаємо похідні 3-го порядку від переміщення полюса Р миттєвого обертання шатунної площини механізму (швидкість зміни прискорення полюса миттєвого обертання): ' x '0 k 1k 22 k 2k 12 k k k 1k 21 ' ' . 3y '0 , y '0' 2 11 k 11k 22 k 12k 21 k 11k 22 k 12 k 21 (9) 35 Коефіцієнти, що входять у (9) визначаються наступним чином: k 11 x x 2 y 2 ; k 12 y x 2 y 2 ; k 1 3y '' x y ; 0 k 21 x x 2 y 2 ; k 22 y x 2 y 2 ; k 2 3y '' x y ; 0 де координати шарнірів А та В в повернутій системі координат х1Ру1: 2 (10) UA 111501 U x cos t sin t , y cos t sin t , x cos t sin t , y cos t sin t . Кут нахилу полюсної дотичної: t 1 3 . 7. Визначаємо похідні 4-го порядку від переміщення полюса Р миттєвого обертання шатунної площини механізму: 5 x IV m4 m1 ; yIV m5 y '' m2 . 0 0 0 (11) Коефіцієнти m1…m5 визначаються наступним чином: 2 ' ' ' ' m1 4y '0' ; m2 4x '0' 6y '0 ; m3 3 y '0 m4 1 4x ''' y ''' 0 0 3y '' 0 4y ''' ; 0 ; (12) 3 x ''' 3y '' 4x ''' 6y '' 4 y ''' 0 0 0 0 0 m5 2 (13) , 3y '' 0 10 де коефіцієнти К1…К5, що входять у (13): x 1 4 x 5 y 2 y 2 3 x y / x 2 ; 2 y ''' 4x ''' 6y '' ; 4 m 3 x ''' ; 0 0 0 0 3 15 2 2 y (14) x2 y2 2 x2 x x x2 4 x2 y x2 y 5 ' ; 5 m 3 y '0' . x x y x y x (15) 8. Визначаємо похідні 5-го порядку від переміщення полюса Р миттєвого обертання шатунної площини: V x 0 1 ' 5y x 2 y 2 x 2 y 2 y '0 V y0 1 2y '' y ''' 0 0 x x y / y x 2 y y 2x 2y x x 2 y y ; x x y / y x y 5 y y x y y 2x 2y x x 2 y y x y y x y x2 y2 x2 y2 '' ''' IV ''' '' 2y 0 y 0 y 0 2x 0 2y 0 x ' ' ' 5 x 2 y 2 y '0 y 2y '0 y '0' y IV 0 IV 0 IV 0 ''' 0 ''' 0 ''' 0 2 '' 0 '' 0 2 IV 0 IV 0 ''' 0 ''' 0 (16) '' 0 2 2 0 2 2 IV x0 / y . (17) 9. Визначаємо точку розпрямлення 5-го порядку для заданого положення шатунної площини як точку перетину кривої (1) та кривої (2), у системі координат х1Ру1: 20 x 25 V V y '' x 0 y 0 0 V 2 x0 V 2 y0 ; y x y V y '' x 0 0 2 V 2 0 V 2 0 . (18) 10. Визначаємо координати точки розпрямлення 5-го порядку Т у базовій системі координат хОу. Для цього проведемо перетворення системи координат за наступними формулами: XΤ = XP – xΤcosαt+yΤsinαt; YΤ = YΡ - уΤ cosαt-xΤ sinαt (19) 11. Проектуємо важільний чотириланковий механізм, у якого довжина другого плеча шатуна k=lBT та кут Ω його злому визначає положення шатунної точки, як така буде прийнята знайдена точка розпрямлення 5-го порядку: k l 2 2 , (20) 3 UA 111501 U 180 2 arctg , 0 360 . (21) 12. Кут нахилу прямолінійної ділянки шатунної кривої визначається наступним чином: ' ' arctg y '0 cos t / y '0 sin t . 5 10 15 20 25 30 (22) Слід відзначити, що оскільки кут , а також всі інші кути, значення яких визначаються через функцію arctg(x), можуть змінюватись від 0 до 360°, для їх визначення слід скористатись не звичайною функцією арктангенса, а функцією arctan 2 y, x , де у, х - відповідно чисельник та знаменник у виразі (22). Ця функція є у більшості сучасних мов програмування. Як видно з прикладу, зображеного на фіг. 1, знайдена особлива точка - точка розпрямлення 5-го порядку, не збігається іншими відомими особливими точками, які використовуються для проектування важільних прямолінійно-напрямних механізмів та визначає нове сімейство таких механізмів. На фіг. 2 показано приклади шатунних кривих механізмів, синтезованих за допомогою точок розпрямлення 5-го порядку, які визначені для різних положень шатунної площини механізму (на фіг. вказано відповідні кути повороту кривошипа). Джерела інформації: 1. Артоболевский И.И. Синтез плоских механизмов. / И.И. Артоболевский, Н.И Левитский, С.А. Черкудинов. - М.: Физматгиз, 1959. - 1084 с. 2. Геронимус Я. Л. Геометрический аппарат теории синтеза плоских механизмов. - М.: Гос. издательство физ.-мат. литературы, 1962. - 400 с. 3. Киницкий Я.Т. Шарнирные механизмы Чебышева с выстоем выходного звена / Я. Т. Киницкий. - К.: Вища школа, 1990. - 232 с. 4. Харжевський В.О. Синтез важільних прямолінійно-напрямних механізмів та механізмів із зупинкою вихідної ланки на базі шарнірного чотирилан-кового механізму: дис… канд. техн. наук: 05.02.02 / В.О. Харжевський; Хмельницький держ. ун-т. - Хмельницький, 2004. - 262 с 5. Gassmann V. Synthese von Geradffihrungen mit ebenen Viergelenkgetrieben, Hamburg, Universitat der Bundeswehr Diss., 2000. - 102 p. 6. Yin L. Synthesis method based on solution regions for planar four-bar straight-line linkages / L.Yin, J.Han, C.Mao, J.Huang, T.Yang //Journal of Mechanical Science and Technology, 26 (10) 2012, С 3159-3167. 7. Wang D. Kinematic Differential Geometry and Saddle Synthesis of Linkages /Wang D.,Wang W.-John Wiley & Sons Singapore Pte. Ltd., 2015.-450 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 5-го порядку, яка визначається як точка перетину поворотного кола з кривою геометричного місця точок, що характеризуються дотиком не нижче 5-го порядку зі своїми дотичними колами, за формулами: x 45 ' V V y '0 x 0 y 0 V 2 x0 V 2 y0 ; y x y ' V y '0 x 0 2 V 2 0 V 2 0 , ' V V де y '0 , x 0 , y 0 - похідні відповідно 2-го та 5-го порядків від переміщення полюса миттєвого обертання шатунної площини. 4 UA 111501 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: використанням, прямолінійно-напрямний, побудований, шарнірний, порядку, 5-го, чотириланковий, механізм, точки, розпрямлення
Код посилання
<a href="https://ua.patents.su/7-111501-sharnirnijj-chotirilankovijj-pryamolinijjno-napryamnijj-mekhanizm-pobudovanijj-z-vikoristannyam-tochki-rozpryamlennya-5-go-poryadku.html" target="_blank" rel="follow" title="База патентів України">Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 5-го порядку</a>
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки розпрямлення 4-го порядку
Номер патенту: 108871
Опубліковано: 10.08.2016
Автор: Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: прямолінійно-напрямний, механізм, порядку, чотириланковий, розпрямлення, побудований, використанням, шарнірний, 4-го, точки
Формула / Реферат:
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка розпрямлення 4-го порядку, яка визначається як точка перетину...
Шарнірний чотириланковий прямолінійно-напрямний механізм, побудований з використанням точки чебишева
Номер патенту: 108872
Опубліковано: 10.08.2016
Автор: Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: використанням, чебишева, чотириланковий, шарнірний, точки, прямолінійно-напрямний, механізм, побудований
Формула / Реферат:
Шарнірний чотириланковий механізм, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, одне плече якого шарнірно зв'язано з кривошипом та коромислом, а інше плече виконано з можливістю опису його шатунною точкою кривої, яка на частковій ділянці траєкторії наближається до прямої лінії, причому за шатунну точку механізму приймається точка Чебишева, яка визначається для заданих довжин кривошипа, шатуна та...
Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 105404
Опубліковано: 25.03.2016
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: сабліна, точний, в.п, прямолінійно-напрямний, протиобертальний, механізм, шарнірно-важільний
Формула / Реферат:
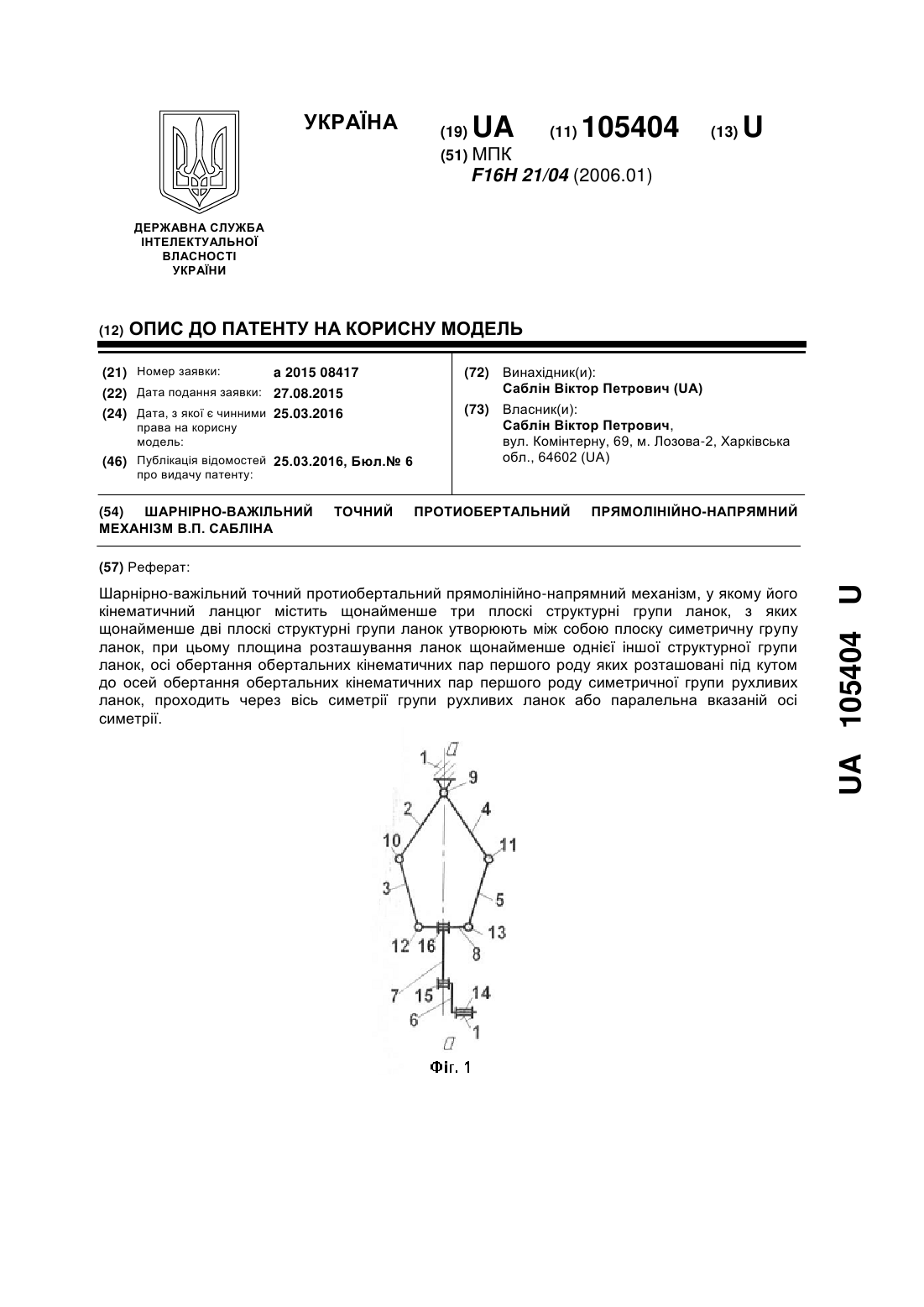
1. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, що містить структурні групи ланок, кожна з яких містить щонайменше дві рухливі ланки, що утворюють між собою щонайменше одну обертальну кінематичну пару першого роду і щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання вказаних обертальних кінематичних пар першого роду...
Кулісно-важільний прямолінійно-напрямний механізм
Номер патенту: 86369
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: прямолінійно-напрямний, механізм, кулісно-важільний
Формула / Реферат:
Кулісно-важільний прямолінійно-напрямний механізм, що містить два важелі, прямокутний важіль, хрестоподібний повзун, діаду повзунів, який відрізняється тим, що додатково оснащений горизонтальною лінійкою, додатковою діадою повзунів, траверзою, повзуном і Т-подібним повзуном зі стопорними гвинтами, причому траверза встановлена на першому важелі за допомогою Т-подібного повзуна, другий важіль за допомогою повзуна встановлений на першому важелі...
Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 102668
Опубліковано: 10.11.2015
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: в.п, сабліна, шарнірно-важільний, прямолінійно-напрямний, точний, механізм
Формула / Реферат:
1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого...
Попередній патент: Дросель регульований
Наступний патент: Запал машини безперервного лиття заготівок
Випадковий патент: Муфта запобіжна з складеною зіркоподібною пружиною