Спосіб визначення орієнтації літального апарата в набігаючому потоці
Номер патенту: 117181
Опубліковано: 26.06.2017
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович

Формула / Реферат
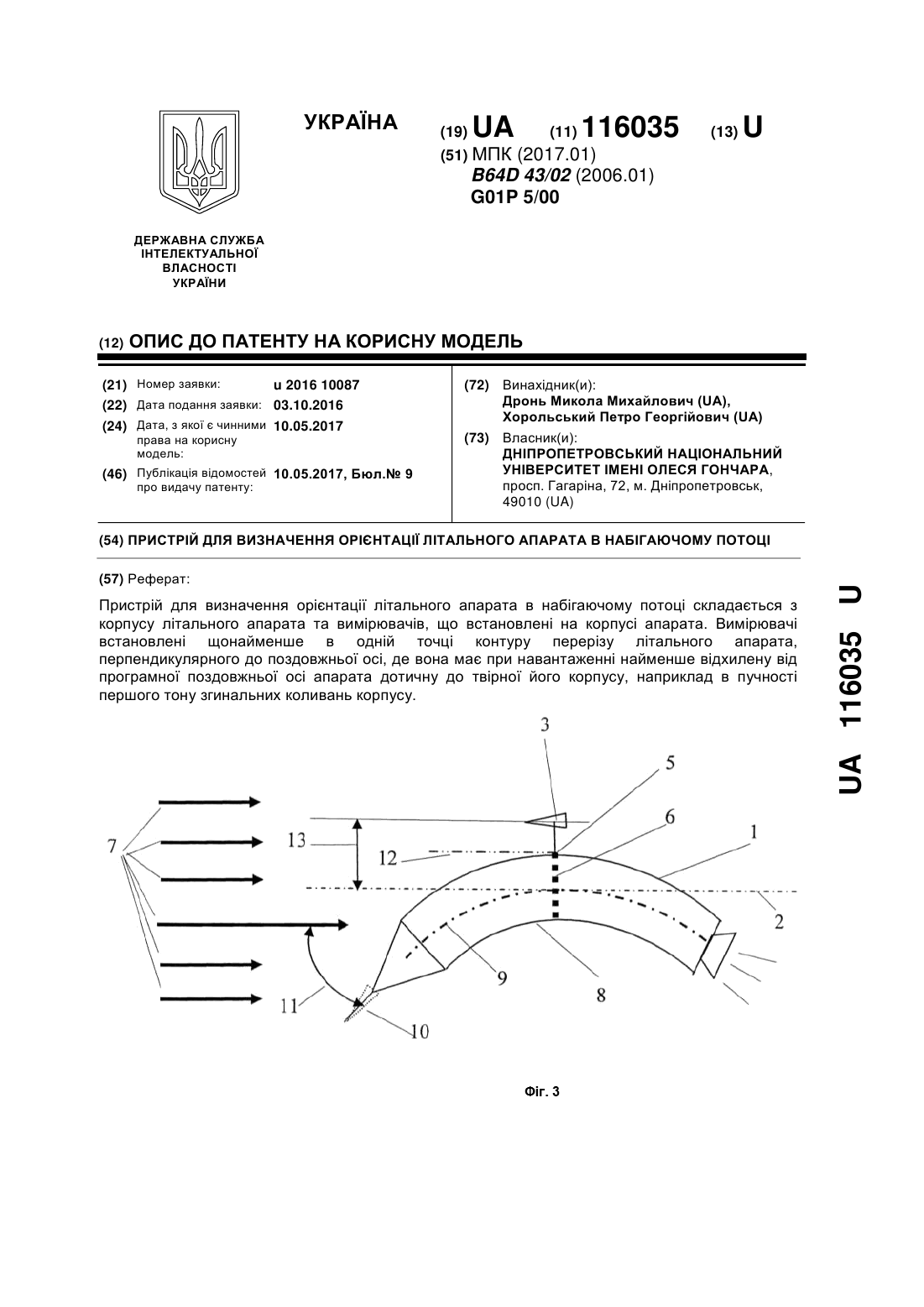
Спосіб визначення орієнтації літального апарата відносно набігаючого потоку, що включає вимірювання кутового відхилення напрямку набігаючого потоку від поздовжньої осі літального апарата, який відрізняється тим, що ці вимірювання проводять щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найменше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в пучності першого тону згинальних коливань корпусу, та щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найбільше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в нулі першого тону згинальних коливань корпусу, визначають різницю значень вимірювань в цих точках і по ній відповідно до форми коливань визначають орієнтацію корпусу літального апарату відносно набігаючого потоку.
Текст
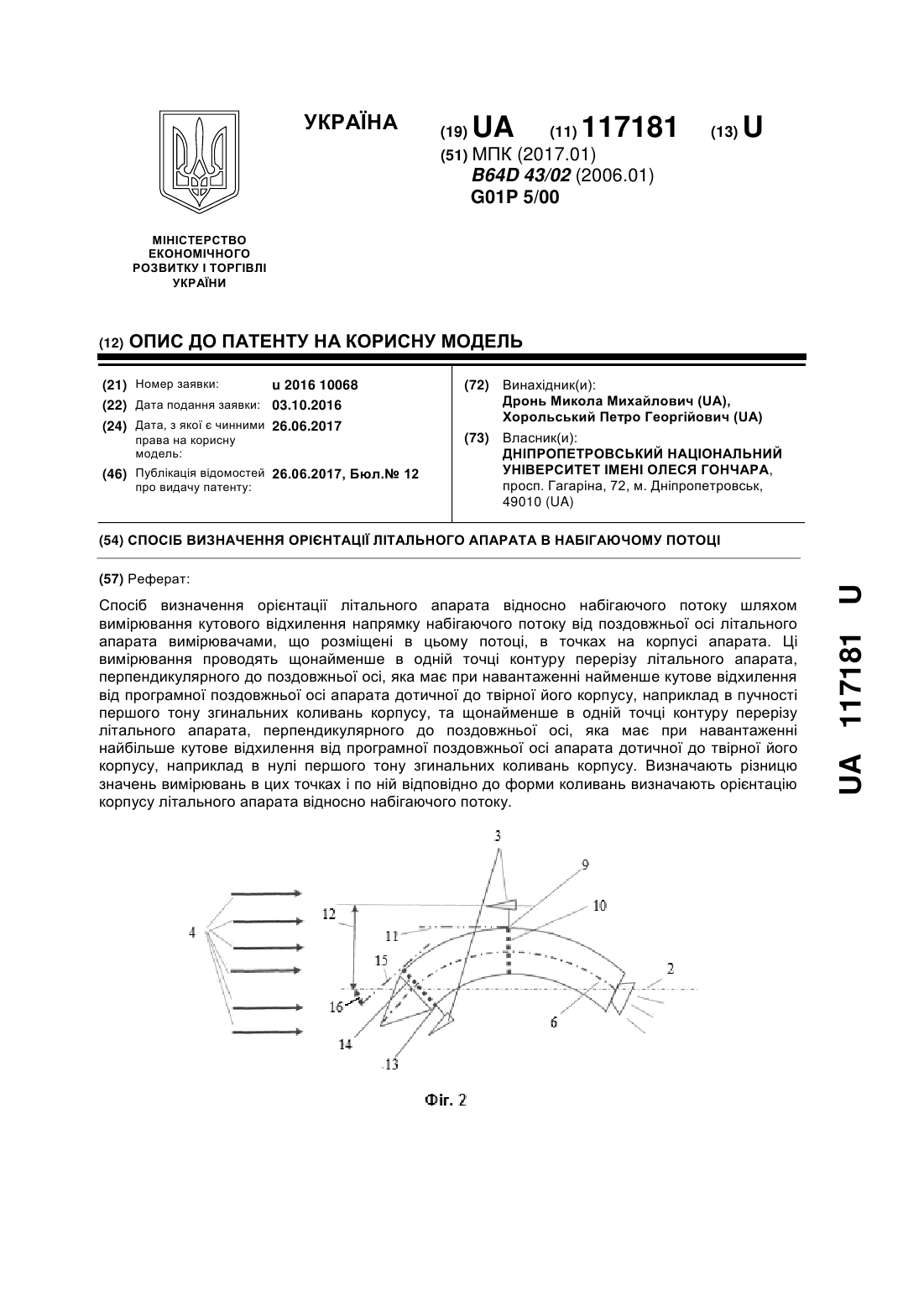
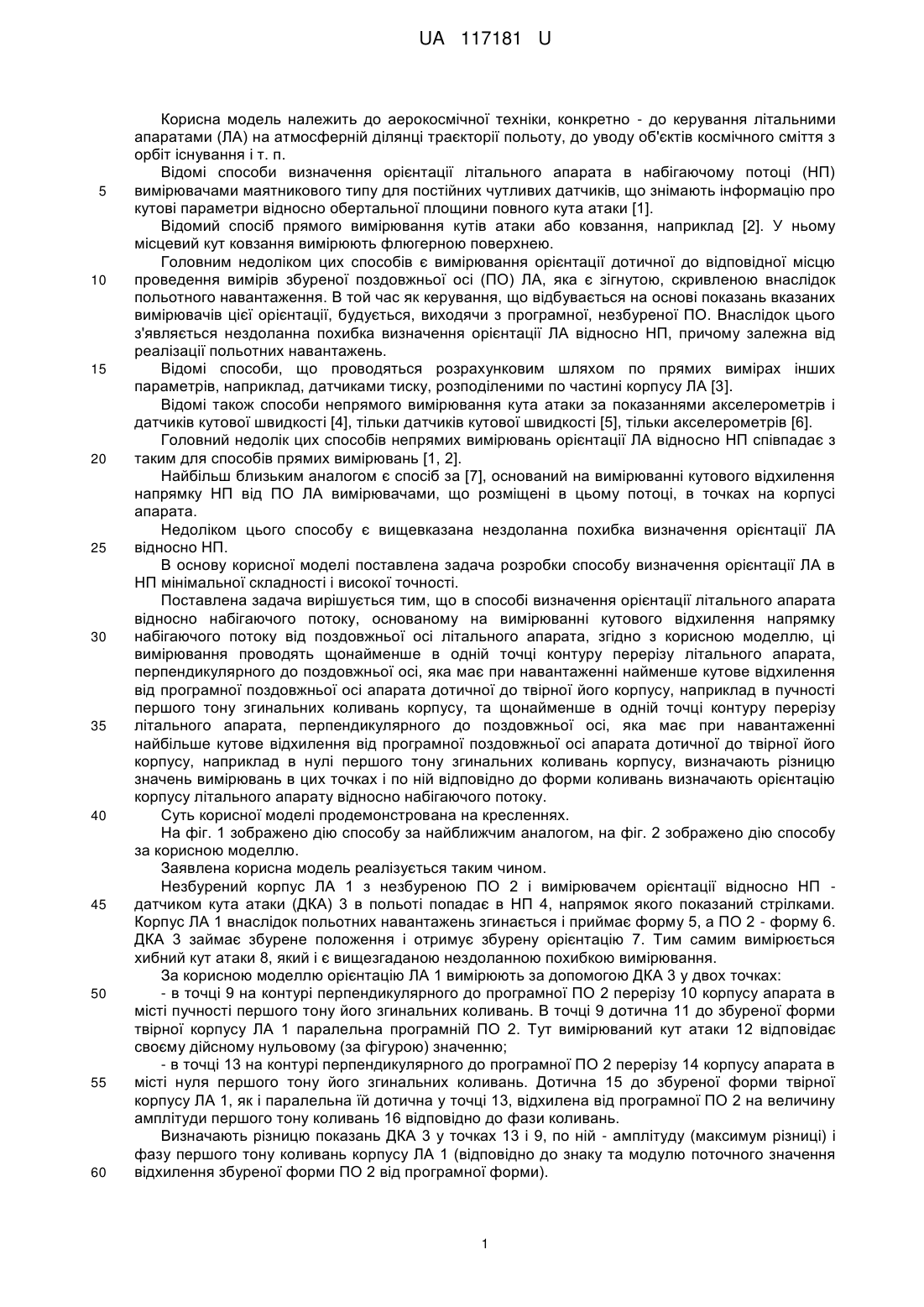
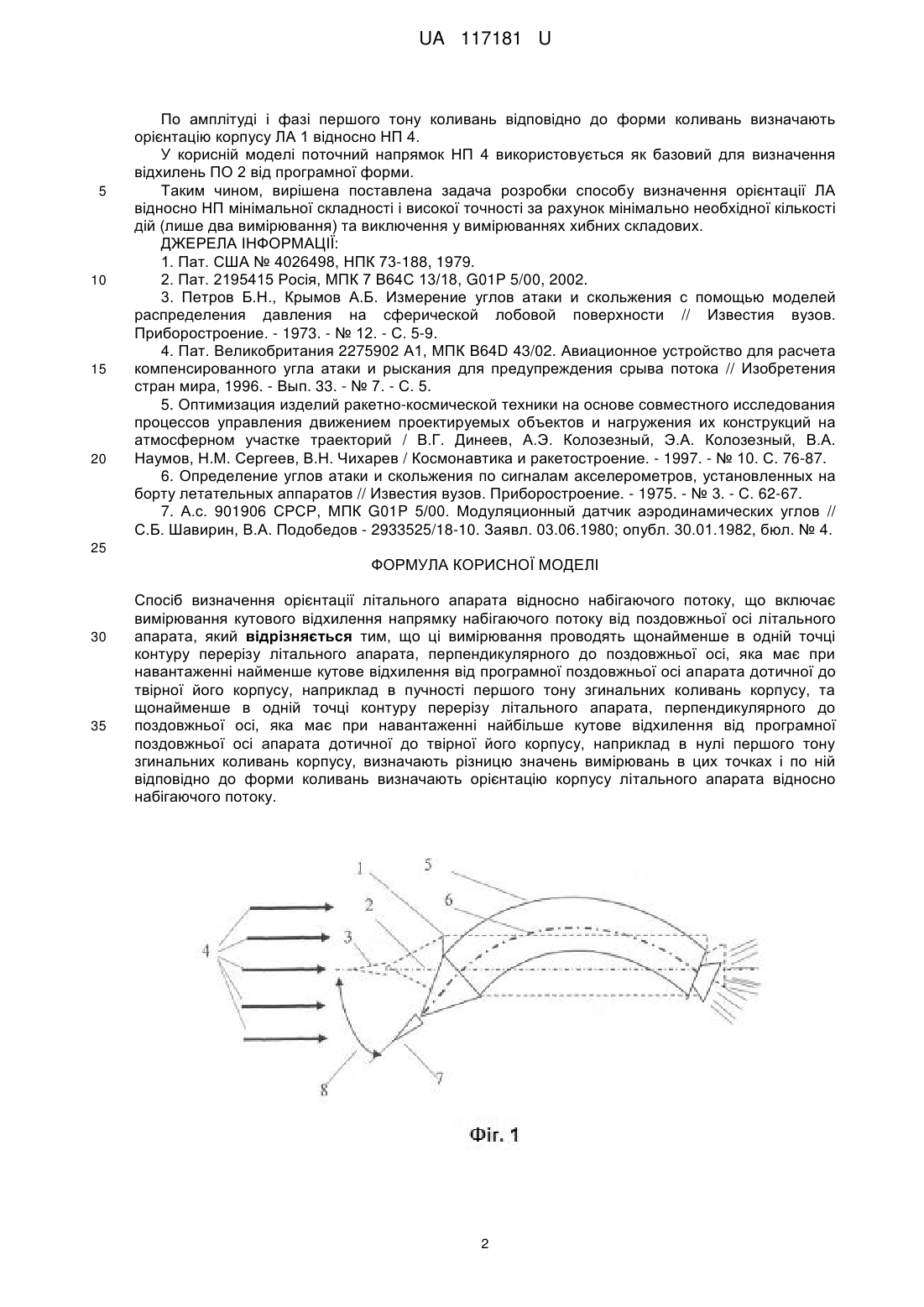
Реферат: Спосіб визначення орієнтації літального апарата відносно набігаючого потоку шляхом вимірювання кутового відхилення напрямку набігаючого потоку від поздовжньої осі літального апарата вимірювачами, що розміщені в цьому потоці, в точках на корпусі апарата. Ці вимірювання проводять щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найменше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в пучності першого тону згинальних коливань корпусу, та щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найбільше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в нулі першого тону згинальних коливань корпусу. Визначають різницю значень вимірювань в цих точках і по ній відповідно до форми коливань визначають орієнтацію корпусу літального апарата відносно набігаючого потоку. UA 117181 U (54) СПОСІБ ВИЗНАЧЕННЯ ОРІЄНТАЦІЇ ЛІТАЛЬНОГО АПАРАТА В НАБІГАЮЧОМУ ПОТОЦІ UA 117181 U UA 117181 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до аерокосмічної техніки, конкретно - до керування літальними апаратами (ЛА) на атмосферній ділянці траєкторії польоту, до уводу об'єктів космічного сміття з орбіт існування і т. п. Відомі способи визначення орієнтації літального апарата в набігаючому потоці (НП) вимірювачами маятникового типу для постійних чутливих датчиків, що знімають інформацію про кутові параметри відносно обертальної площини повного кута атаки [1]. Відомий спосіб прямого вимірювання кутів атаки або ковзання, наприклад [2]. У ньому місцевий кут ковзання вимірюють флюгерною поверхнею. Головним недоліком цих способів є вимірювання орієнтації дотичної до відповідної місцю проведення вимірів збуреної поздовжньої осі (ПО) ЛА, яка є зігнутою, скривленою внаслідок польотного навантаження. В той час як керування, що відбувається на основі показань вказаних вимірювачів цієї орієнтації, будується, виходячи з програмної, незбуреної ПО. Внаслідок цього з'являється нездоланна похибка визначення орієнтації ЛА відносно НП, причому залежна від реалізації польотних навантажень. Відомі способи, що проводяться розрахунковим шляхом по прямих вимірах інших параметрів, наприклад, датчиками тиску, розподіленими по частині корпусу ЛА [3]. Відомі також способи непрямого вимірювання кута атаки за показаннями акселерометрів і датчиків кутової швидкості [4], тільки датчиків кутової швидкості [5], тільки акселерометрів [6]. Головний недолік цих способів непрямих вимірювань орієнтації ЛА відносно НП співпадає з таким для способів прямих вимірювань [1, 2]. Найбільш близьким аналогом є спосіб за [7], оснований на вимірюванні кутового відхилення напрямку НП від ПО ЛА вимірювачами, що розміщені в цьому потоці, в точках на корпусі апарата. Недоліком цього способу є вищевказана нездоланна похибка визначення орієнтації ЛА відносно НП. В основу корисної моделі поставлена задача розробки способу визначення орієнтації ЛА в НП мінімальної складності і високої точності. Поставлена задача вирішується тим, що в способі визначення орієнтації літального апарата відносно набігаючого потоку, основаному на вимірюванні кутового відхилення напрямку набігаючого потоку від поздовжньої осі літального апарата, згідно з корисною моделлю, ці вимірювання проводять щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найменше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в пучності першого тону згинальних коливань корпусу, та щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найбільше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в нулі першого тону згинальних коливань корпусу, визначають різницю значень вимірювань в цих точках і по ній відповідно до форми коливань визначають орієнтацію корпусу літального апарату відносно набігаючого потоку. Суть корисної моделі продемонстрована на кресленнях. На фіг. 1 зображено дію способу за найближчим аналогом, на фіг. 2 зображено дію способу за корисною моделлю. Заявлена корисна модель реалізується таким чином. Незбурений корпус ЛА 1 з незбуреною ПО 2 і вимірювачем орієнтації відносно НП датчиком кута атаки (ДКА) 3 в польоті попадає в НП 4, напрямок якого показаний стрілками. Корпус ЛА 1 внаслідок польотних навантажень згинається і приймає форму 5, а ПО 2 - форму 6. ДКА 3 займає збурене положення і отримує збурену орієнтацію 7. Тим самим вимірюється хибний кут атаки 8, який і є вищезгаданою нездоланною похибкою вимірювання. За корисною моделлю орієнтацію ЛА 1 вимірюють за допомогою ДКА 3 у двох точках: - в точці 9 на контурі перпендикулярного до програмної ПО 2 перерізу 10 корпусу апарата в місті пучності першого тону його згинальних коливань. В точці 9 дотична 11 до збуреної форми твірної корпусу ЛА 1 паралельна програмній ПО 2. Тут вимірюваний кут атаки 12 відповідає своєму дійсному нульовому (за фігурою) значенню; - в точці 13 на контурі перпендикулярного до програмної ПО 2 перерізу 14 корпусу апарата в місті нуля першого тону його згинальних коливань. Дотична 15 до збуреної форми твірної корпусу ЛА 1, як і паралельна їй дотична у точці 13, відхилена від програмної ПО 2 на величину амплітуди першого тону коливань 16 відповідно до фази коливань. Визначають різницю показань ДКА 3 у точках 13 і 9, по ній - амплітуду (максимум різниці) і фазу першого тону коливань корпусу ЛА 1 (відповідно до знаку та модулю поточного значення відхилення збуреної форми ПО 2 від програмної форми). 1 UA 117181 U 5 10 15 20 По амплітуді і фазі першого тону коливань відповідно до форми коливань визначають орієнтацію корпусу ЛА 1 відносно НП 4. У корисній моделі поточний напрямок НП 4 використовується як базовий для визначення відхилень ПО 2 від програмної форми. Таким чином, вирішена поставлена задача розробки способу визначення орієнтації ЛА відносно НП мінімальної складності і високої точності за рахунок мінімально необхідної кількості дій (лише два вимірювання) та виключення у вимірюваннях хибних складових. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Пат. США № 4026498, НПК 73-188, 1979. 2. Пат. 2195415 Росія, МПК 7 В64С 13/18, G01P 5/00, 2002. 3. Петров Б.Н., Крымов А.Б. Измерение углов атаки и скольжения с помощью моделей распределения давления на сферической лобовой поверхности // Известия вузов. Приборостроение. - 1973. - № 12. - С. 5-9. 4. Пат. Великобритания 2275902 Α1, МПК Β64D 43/02. Авиационное устройство для расчета компенсированного угла атаки и рыскания для предупреждения срыва потока // Изобретения стран мира, 1996. - Вып. 33. - № 7. - С. 5. 5. Оптимизация изделий ракетно-космической техники на основе совместного исследования процессов управления движением проектируемых объектов и нагружения их конструкций на атмосферном участке траекторий / В.Г. Динеев, А.Э. Колозезный, Э.А. Колозезный, В.А. Наумов, Η.Μ. Сергеев, В.Н. Чихарев / Космонавтика и ракетостроение. - 1997. - № 10. С. 76-87. 6. Определение углов атаки и скольжения по сигналам акселерометров, установленных на борту летательных аппаратов // Известия вузов. Приборостроение. - 1975. - № 3. - С. 62-67. 7. А.с. 901906 СРСР, МПК G01P 5/00. Модуляционный датчик аэродинамических углов // С.Б. Шавирин, В.А. Подобедов - 2933525/18-10. Заявл. 03.06.1980; опубл. 30.01.1982, бюл. № 4. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб визначення орієнтації літального апарата відносно набігаючого потоку, що включає вимірювання кутового відхилення напрямку набігаючого потоку від поздовжньої осі літального апарата, який відрізняється тим, що ці вимірювання проводять щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найменше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в пучності першого тону згинальних коливань корпусу, та щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, яка має при навантаженні найбільше кутове відхилення від програмної поздовжньої осі апарата дотичної до твірної його корпусу, наприклад в нулі першого тону згинальних коливань корпусу, визначають різницю значень вимірювань в цих точках і по ній відповідно до форми коливань визначають орієнтацію корпусу літального апарата відносно набігаючого потоку. 2 UA 117181 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01P 5/00, B64D 43/02
Мітки: літального, визначення, потоці, орієнтації, набігаючому, апарата, спосіб
Код посилання
<a href="https://ua.patents.su/5-117181-sposib-viznachennya-oriehntaci-litalnogo-aparata-v-nabigayuchomu-potoci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації літального апарата в набігаючому потоці</a>
Пристрій для визначення орієнтації літального апарата в набігаючому потоці
Номер патенту: 116035
Опубліковано: 10.05.2017
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: G01P 5/00, B64D 43/02
Мітки: пристрій, потоці, апарата, визначення, набігаючому, орієнтації, літального
Формула / Реферат:
Пристрій для визначення орієнтації літального апарата в набігаючому потоці, що складається з корпусу літального апарата та вимірювачів, що встановлені на корпусі апарата, який відрізняється тим, що ці вимірювачі встановлені щонайменше в одній точці контуру перерізу літального апарата, перпендикулярного до поздовжньої осі, де вона має при навантаженні найменше відхилену від програмної поздовжньої осі апарата дотичну до твірної його корпусу,...
Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці
Номер патенту: 105904
Опубліковано: 10.07.2014
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: B64G 1/24, G01P 13/00
Мітки: стабілізації, руху, апарата, обертального, пристрій, набігаючому, потоці, літального
Формула / Реферат:
Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці, який включає покажчик потоку у вигляді симетричної крилової аеродинамічної поверхні, встановленої на апараті за допомогою поперечної осі обертання і перпендикулярної до неї осі обертання, установленої в напрямку повздовжньої осі літального апарата, та датчик кутової швидкості, який відрізняється тим, що цей датчик установлено так, що його вісь чутливості...
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата при його просторовій переорієнтації
Номер патенту: 89451
Опубліковано: 25.01.2010
Автор: Рюмін Максим Миколайович
МПК: B64G 1/26
Мітки: двигуні, літального, реактивні, орієнтації, просторовий, переорієнтації, апарата, сигналу, спосіб, керуючого, формування
Формула / Реферат:
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата (ЛА) при його просторовій переорієнтації, що включає вимірювання поточної орієнтації і кутової швидкості в проекціях на зв'язані осі літального апарата, визначення відхилень обмірюваних кутових параметрів від програмних, формування сигналу керування по відхиленнях шляхом додавання кутових відхилень і складових кутової швидкості обертання, узятих з...
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра
Номер патенту: 67704
Опубліковано: 12.03.2012
Автори: Коврижкін Олег Георгійович, Горін Іван Ярославович, Коврижкін Ігор Олегович, Мельникович Володимир Борисович, Лагута Андрій Геннадійович
МПК: G01C 21/08
Мітки: кутової, сигналів, спосіб, визначення, навігації, апарата, орієнтації, літального, використанням, магнітометра, супутникової
Формула / Реферат:
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу
Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 102894
Опубліковано: 25.11.2015
Автори: Фірсов Сергій Миколайович, Жежера Іван Володимирович, Будіба Уіссам
МПК: G01C 23/00
Мітки: орієнтації, безпілотного, літального, малогабаритного, система, апарата
Формула / Реферат:
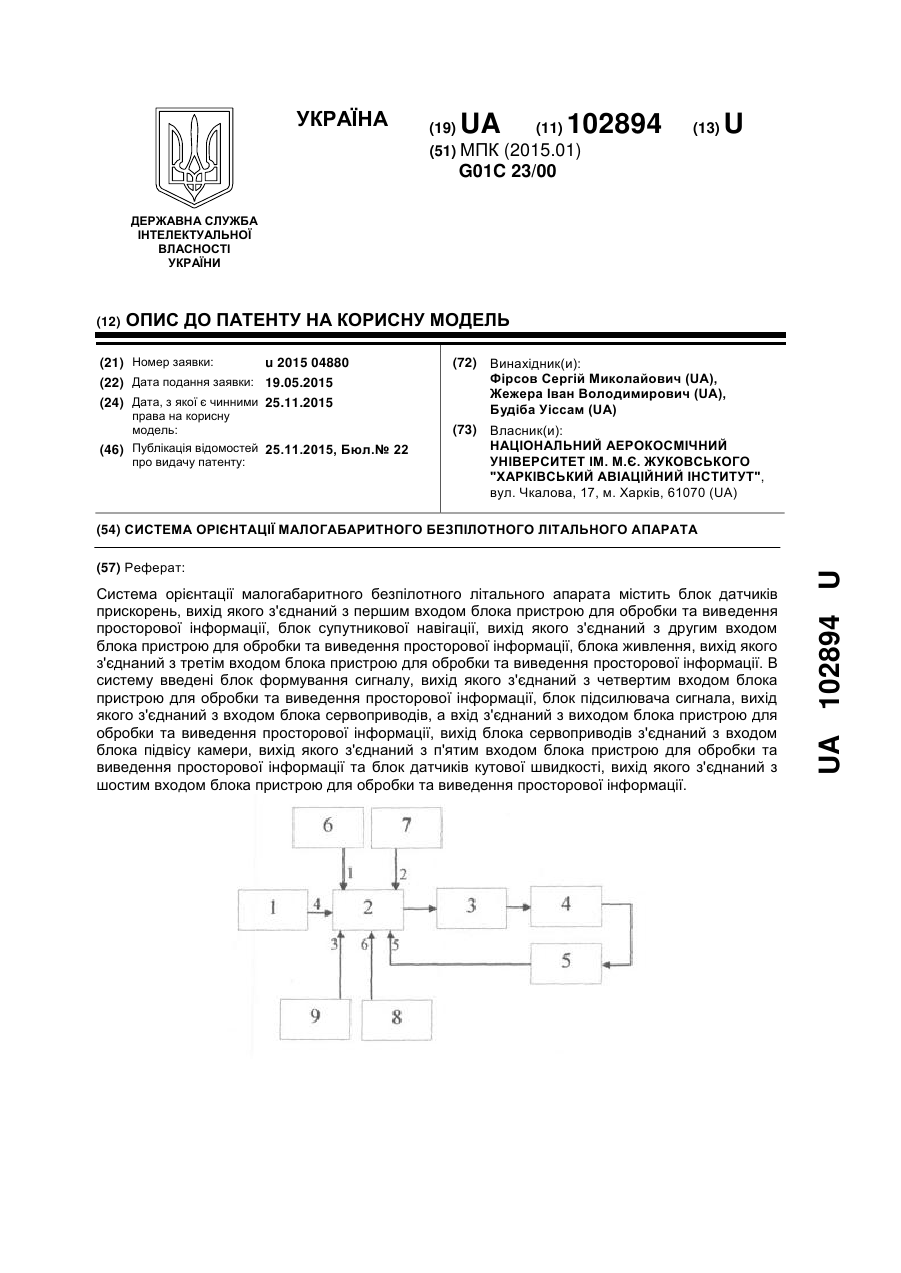
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової...