Ваговий пристрій для фронтального навантажувача

Формула / Реферат
Ваговий пристрій для фронтального навантажувача, що містить датчик тиску, вихід якого підключений до входу аналого-цифрового перетворювача, який своїм виходом підведений до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу, клавіатуру та індикатор, що з'єднані з процесорним блоком, інклінометр (або датчики положення, вихід яких підключений до входу аналого-цифрового перетворювача), який через інтерфейс підключений до процесорного блока та вимірює кут нахилу стріли навантажувача відносно горизонту, який відрізняється тим, що містить інклінометр, який вимірює кут нахилу навантажувача відносно горизонту.
Текст
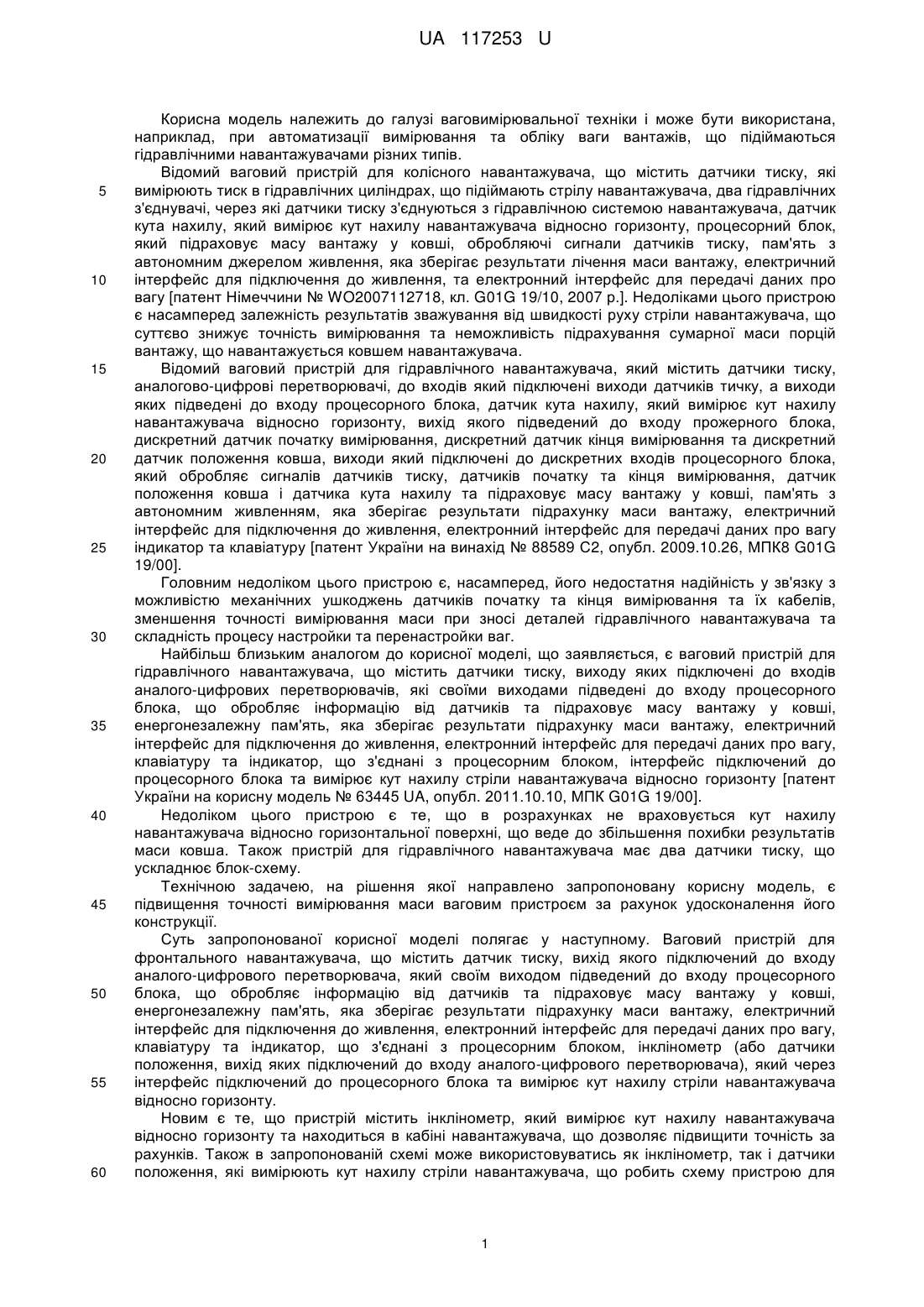
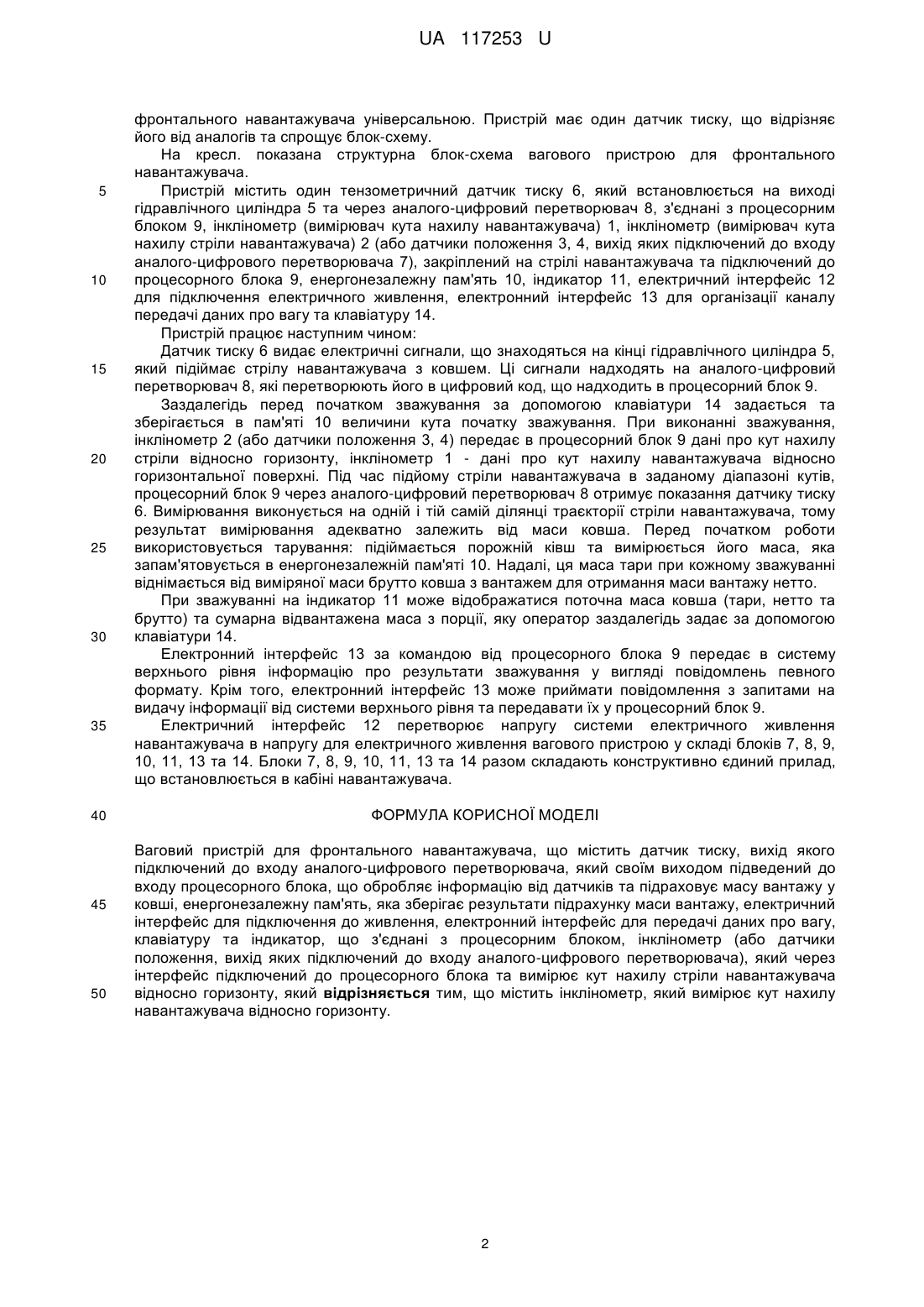
Реферат: Ваговий пристрій для фронтального навантажувача, що містить датчик тиску, вихід якого підключений до входу аналого-цифрового перетворювача, який своїм виходом підведений до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу, клавіатуру та індикатор, що з'єднані з процесорним блоком, інклінометр (або датчики положення, вихід яких підключений до входу аналого-цифрового перетворювача), який через інтерфейс підключений до процесорного блока та вимірює кут нахилу стріли навантажувача відносно горизонту, причому пристрій містить інклінометр, який вимірює кут нахилу навантажувача відносно горизонту. UA 117253 U (54) ВАГОВИЙ ПРИСТРІЙ ДЛЯ ФРОНТАЛЬНОГО НАВАНТАЖУВАЧА UA 117253 U UA 117253 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі ваговимірювальної техніки і може бути використана, наприклад, при автоматизації вимірювання та обліку ваги вантажів, що підіймаються гідравлічними навантажувачами різних типів. Відомий ваговий пристрій для колісного навантажувача, що містить датчики тиску, які вимірюють тиск в гідравлічних циліндрах, що підіймають стрілу навантажувача, два гідравлічних з'єднувачі, через які датчики тиску з'єднуються з гідравлічною системою навантажувача, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, процесорний блок, який підраховує масу вантажу у ковші, обробляючі сигнали датчиків тиску, пам'ять з автономним джерелом живлення, яка зберігає результати лічення маси вантажу, електричний інтерфейс для підключення до живлення, та електронний інтерфейс для передачі даних про вагу [патент Німеччини № WO2007112718, кл. G01G 19/10, 2007 р.]. Недоліками цього пристрою є насамперед залежність результатів зважування від швидкості руху стріли навантажувача, що суттєво знижує точність вимірювання та неможливість підрахування сумарної маси порцій вантажу, що навантажується ковшем навантажувача. Відомий ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналогово-цифрові перетворювачі, до входів який підключені виходи датчиків тичку, а виходи яких підведені до входу процесорного блока, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу прожерного блока, дискретний датчик початку вимірювання, дискретний датчик кінця вимірювання та дискретний датчик положення ковша, виходи який підключені до дискретних входів процесорного блока, який обробляє сигналів датчиків тиску, датчиків початку та кінця вимірювання, датчик положення ковша і датчика кута нахилу та підраховує масу вантажу у ковші, пам'ять з автономним живленням, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу індикатор та клавіатуру [патент України на винахід № 88589 С2, опубл. 2009.10.26, МПК8 G01G 19/00]. Головним недоліком цього пристрою є, насамперед, його недостатня надійність у зв'язку з можливістю механічних ушкоджень датчиків початку та кінця вимірювання та їх кабелів, зменшення точності вимірювання маси при зносі деталей гідравлічного навантажувача та складність процесу настройки та перенастройки ваг. Найбільш близьким аналогом до корисної моделі, що заявляється, є ваговий пристрій для гідравлічного навантажувача, що містить датчики тиску, виходу яких підключені до входів аналого-цифрових перетворювачів, які своїми виходами підведені до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу, клавіатуру та індикатор, що з'єднані з процесорним блоком, інтерфейс підключений до процесорного блока та вимірює кут нахилу стріли навантажувача відносно горизонту [патент України на корисну модель № 63445 UA, опубл. 2011.10.10, МПК G01G 19/00]. Недоліком цього пристрою є те, що в розрахунках не враховується кут нахилу навантажувача відносно горизонтальної поверхні, що веде до збільшення похибки результатів маси ковша. Також пристрій для гідравлічного навантажувача має два датчики тиску, що ускладнює блок-схему. Технічною задачею, на рішення якої направлено запропоновану корисну модель, є підвищення точності вимірювання маси ваговим пристроєм за рахунок удосконалення його конструкції. Суть запропонованої корисної моделі полягає у наступному. Ваговий пристрій для фронтального навантажувача, що містить датчик тиску, вихід якого підключений до входу аналого-цифрового перетворювача, який своїм виходом підведений до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу, клавіатуру та індикатор, що з'єднані з процесорним блоком, інклінометр (або датчики положення, вихід яких підключений до входу аналого-цифрового перетворювача), який через інтерфейс підключений до процесорного блока та вимірює кут нахилу стріли навантажувача відносно горизонту. Новим є те, що пристрій містить інклінометр, який вимірює кут нахилу навантажувача відносно горизонту та находиться в кабіні навантажувача, що дозволяє підвищити точність за рахунків. Також в запропонованій схемі може використовуватись як інклінометр, так і датчики положення, які вимірюють кут нахилу стріли навантажувача, що робить схему пристрою для 1 UA 117253 U 5 10 15 20 25 30 35 40 45 50 фронтального навантажувача універсальною. Пристрій має один датчик тиску, що відрізняє його від аналогів та спрощує блок-схему. На кресл. показана структурна блок-схема вагового пристрою для фронтального навантажувача. Пристрій містить один тензометричний датчик тиску 6, який встановлюється на виході гідравлічного циліндра 5 та через аналого-цифровий перетворювач 8, з'єднані з процесорним блоком 9, інклінометр (вимірювач кута нахилу навантажувача) 1, інклінометр (вимірювач кута нахилу стріли навантажувача) 2 (або датчики положення 3, 4, вихід яких підключений до входу аналого-цифрового перетворювача 7), закріплений на стрілі навантажувача та підключений до процесорного блока 9, енергонезалежну пам'ять 10, індикатор 11, електричний інтерфейс 12 для підключення електричного живлення, електронний інтерфейс 13 для організації каналу передачі даних про вагу та клавіатуру 14. Пристрій працює наступним чином: Датчик тиску 6 видає електричні сигнали, що знаходяться на кінці гідравлічного циліндра 5, який підіймає стрілу навантажувача з ковшем. Ці сигнали надходять на аналого-цифровий перетворювач 8, які перетворюють його в цифровий код, що надходить в процесорний блок 9. Заздалегідь перед початком зважування за допомогою клавіатури 14 задається та зберігається в пам'яті 10 величини кута початку зважування. При виконанні зважування, інклінометр 2 (або датчики положення 3, 4) передає в процесорний блок 9 дані про кут нахилу стріли відносно горизонту, інклінометр 1 - дані про кут нахилу навантажувача відносно горизонтальної поверхні. Під час підйому стріли навантажувача в заданому діапазоні кутів, процесорний блок 9 через аналого-цифровий перетворювач 8 отримує показання датчику тиску 6. Вимірювання виконується на одній і тій самій ділянці траєкторії стріли навантажувача, тому результат вимірювання адекватно залежить від маси ковша. Перед початком роботи використовується тарування: підіймається порожній ківш та вимірюється його маса, яка запам'ятовується в енергонезалежній пам'яті 10. Надалі, ця маса тари при кожному зважуванні віднімається від виміряної маси брутто ковша з вантажем для отримання маси вантажу нетто. При зважуванні на індикатор 11 може відображатися поточна маса ковша (тари, нетто та брутто) та сумарна відвантажена маса з порції, яку оператор заздалегідь задає за допомогою клавіатури 14. Електронний інтерфейс 13 за командою від процесорного блока 9 передає в систему верхнього рівня інформацію про результати зважування у вигляді повідомлень певного формату. Крім того, електронний інтерфейс 13 може приймати повідомлення з запитами на видачу інформації від системи верхнього рівня та передавати їх у процесорний блок 9. Електричний інтерфейс 12 перетворює напругу системи електричного живлення навантажувача в напругу для електричного живлення вагового пристрою у складі блоків 7, 8, 9, 10, 11, 13 та 14. Блоки 7, 8, 9, 10, 11, 13 та 14 разом складають конструктивно єдиний прилад, що встановлюється в кабіні навантажувача. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Ваговий пристрій для фронтального навантажувача, що містить датчик тиску, вихід якого підключений до входу аналого-цифрового перетворювача, який своїм виходом підведений до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про вагу, клавіатуру та індикатор, що з'єднані з процесорним блоком, інклінометр (або датчики положення, вихід яких підключений до входу аналого-цифрового перетворювача), який через інтерфейс підключений до процесорного блока та вимірює кут нахилу стріли навантажувача відносно горизонту, який відрізняється тим, що містить інклінометр, який вимірює кут нахилу навантажувача відносно горизонту. 2 UA 117253 U Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01G 19/00
Мітки: пристрій, ваговий, фронтального, навантажувача
Код посилання
<a href="https://ua.patents.su/5-117253-vagovijj-pristrijj-dlya-frontalnogo-navantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Ваговий пристрій для фронтального навантажувача</a>
Ваговий пристрій для гідравлічного навантажувача
Номер патенту: 63445
Опубліковано: 10.10.2011
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/00
Мітки: гідравлічного, ваговий, навантажувача, пристрій
Формула / Реферат:
Ваговий пристрій для гідравлічного навантажувача, що містить датчики тиску, виходи яких підключені до входів аналого-цифрових перетворювачів, які своїми виходами підведені до входу процесорного блока, що обробляє інформацію від датчиків та підраховує масу вантажу у ковші, енергонезалежну пам'ять, яка зберігає результати підрахунку маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі даних про...
Ваговий пристрій для гідравлічного навантажувача
Номер патенту: 88589
Опубліковано: 26.10.2009
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: гідравлічного, навантажувача, пристрій, ваговий
Формула / Реферат:
1. Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу процесорного блоку, який обробляє сигнали датчиків тиску і датчика кута нахилу та підраховує масу вантажу у ковші, пам'ять...
Ваговий пристрій для гідравлічного навантажувача

Номер патенту: 94665
Опубліковано: 25.05.2011
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/40, G06F 19/00, G01G 19/08
Мітки: пристрій, гідравлічного, ваговий, навантажувача
Формула / Реферат:
Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, що через гідравлічні з'єднувачі підключені до нагнітаючого та вихлопного входів гідравлічних циліндрів, які підіймають стрілу навантажувача, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, виходи яких підведені до входу процесорного блока, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого...
Ваговий пристрій для гідравлічного навантажувача

Номер патенту: 95758
Опубліковано: 25.08.2011
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/10
Мітки: ваговий, гідравлічного, пристрій, навантажувача
Формула / Реферат:
Ваговий пристрій для гідравлічного навантажувача, який містить дискретний датчик положення стріли, датчик тиску на вході та датчик тиску на виході гідравлічного циліндра підйому стріли, процесорний блок, енергонезалежну пам'ять, індикатор та клавіатуру, при цьому виходи всіх датчиків, індикатора та клавіатури підключені до відповідних входів та виходів процесорного блока, який відрізняється тим, що додатково має шаблон вимірювального...
Стріла робочого устаткування фронтального навантажувача
Номер патенту: 27222
Опубліковано: 25.10.2007
Автори: Луць Віктор Петрович, Лопачук Вадим Леонідович
МПК: E02F 3/34
Мітки: фронтального, стріла, робочого, навантажувача, устаткування
Формула / Реферат:
Стріла робочого устаткування фронтального навантажувача, яка містить порожнисті поздовжні балки кутоподібної форми з привареними на її кінцях втулками з можливістю шарнірного з'єднання стріли відповідно з ковшем та базовою машиною, порожнисту поперечну балку, яка жорстко прикріплена торцевими сторонами до поздовжніх балок, змонтовані на плоскокутовому стику під листовими накладками їх півбалок втулки з можливістю шарнірного встановлення...
Попередній патент: Пристрій для нанесення термоклею
Наступний патент: Спосіб виготовлення овальних гвинтових заготовок
Випадковий патент: Газліфтний барботажний апарат з центральним поршнем