Спосіб ідентифікації дефекту відшарування внутрішнього тонкого криволінійного металевого шару, що підкріплює зовнішній пружний шар, при аварійних впливах
Номер патенту: 122981
Опубліковано: 12.02.2018
Автори: Громов Василь Олександрович, Ободан Наталія Іллівна, Пацюк Анатолій Григорович, Полішко Олексій Миколайович, Адлуцький Віктор Якович

Формула / Реферат
Спосіб ідентифікації дефекту відшарування внутрішнього тонкого криволінійного металевого шару, що підкріплює зовнішній пружний шар, при аварійних впливах, в якому за спостережуваними значеннями вектора деформації внутрішньої поверхні за час, менший часу розвитку критичної деформації внаслідок втрати стійкості або нагріву системи, фіксують наявність відшарування, який відрізняється тим, що ідентифікацію дефекту з подальшим прогнозом уразливості визначають за час, менший часу досягнення критичного стану внаслідок аварійного впливу, всі можливі стани системи описують векторами деформацій, які обчислюють методом скінченних елементів за допомогою математичної моделі даної системи і розбивають на кластери, що описують можливі стани, ідентифікацію дефекту проводять за допомогою бінарного нейрокласифікатора, на входи якого надходять виміряні вектори спостережуваних деформацій, а на виході формулюють бінарний вектор, компоненти якого за час, менший часу досягнення критичного стану, здійснюють ідентифікацію наявності або відсутності дефекту.
Текст
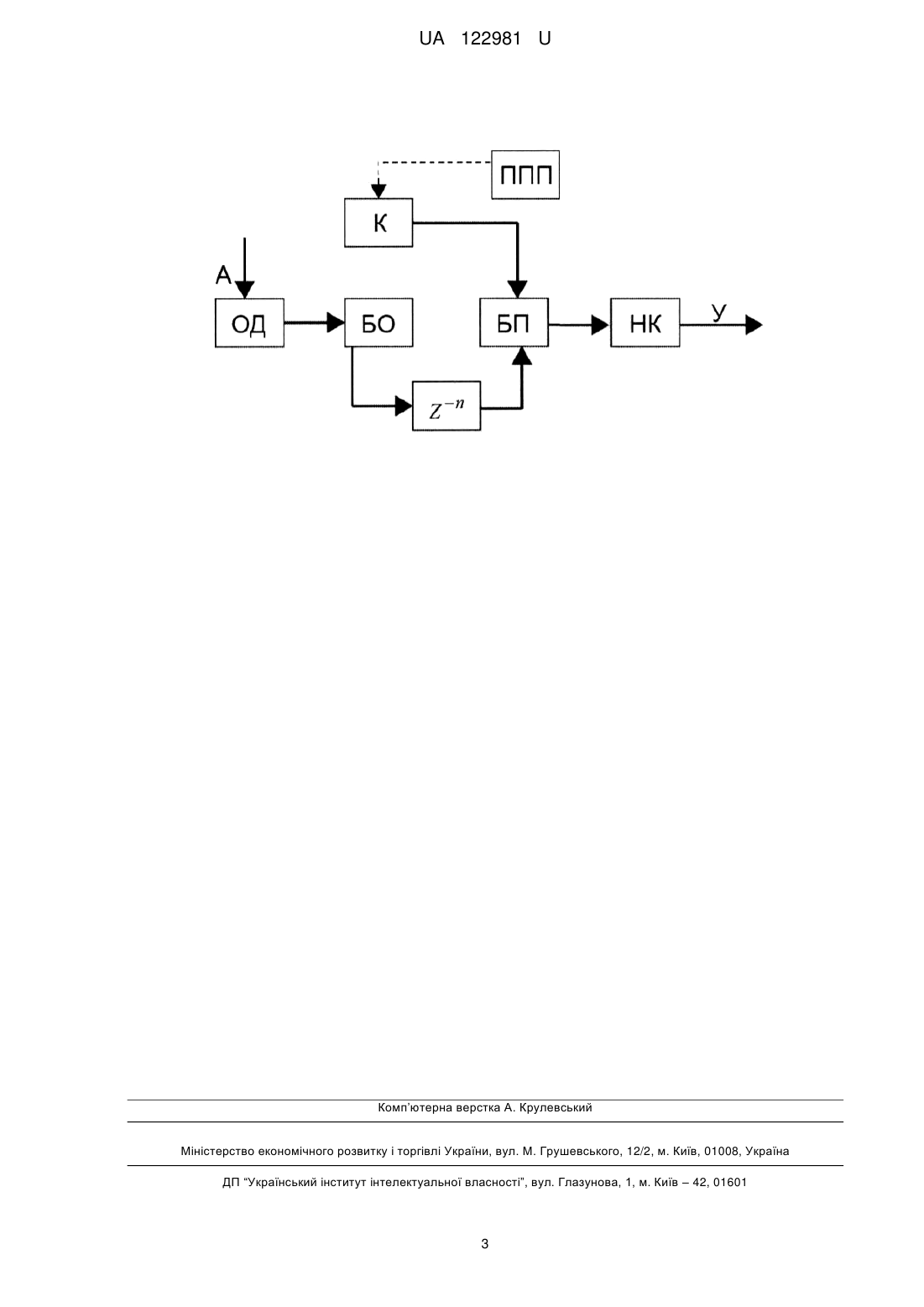
Реферат: Спосіб ідентифікації дефекту відшарування внутрішнього тонкого криволінійного металевого шару, що підкріплює зовнішній пружний шар, при аварійних впливах, в якому за спостережуваними значеннями вектора деформації внутрішньої поверхні за час, менший часу розвитку критичної деформації внаслідок втрати стійкості або нагріву системи, фіксують наявність відшарування. Ідентифікацію дефекту з подальшим прогнозом уразливості визначають за час, менший часу досягнення критичного стану внаслідок аварійного впливу. Всі можливі стани системи описують векторами деформацій, які обчислюють методом скінченних елементів за допомогою математичної моделі даної системи і розбивають на кластери, що описують можливі стани. Ідентифікацію дефекту проводять за допомогою бінарного нейрокласифікатора, на входи якого надходять виміряні вектори спостережуваних деформацій, а на виході формулюють бінарний вектор, компоненти якого за час, менший часу досягнення критичного стану, здійснюють ідентифікацію наявності або відсутності дефекту. UA 122981 U (12) UA 122981 U UA 122981 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до технічної діагностики, а конкретніше - до способу ідентифікації моменту появи локального відшарування внутрішнього шару в разі термосилового впливу на пружну систему, яка знаходиться в процесі експлуатації, і може використовуватися для прийняття рішення про функціональні можливості системи і прогноз її подальшої працездатності за час, менший, ніж час досягнення системою критичного стану за рахунок розвитку дефекту. Аналогом корисної моделі є спосіб діагностики пошкоджень в тонких тілах, який полягає в тому, що на поверхні діагностованого тіла визначають появу пробоїни, використовуючи інформацію про поведінку системи під дією експлуатаційного навантаження [1]. Суть способу полягає в тому, що використовують саме експлуатаційне навантаження і відгук тонкого тіла на це навантаження, як відгук тонкого тіла використовують значення деформацій зовнішньої і внутрішньої поверхонь тонкого тіла, які вимірюють в заданих точках, відповідні обчислені значення деформацій визначають за допомогою методу скінченних елементів з використанням математичної моделі конструкції з пошкодженням, при цьому область пошкодження тонкого тіла, параметризують замкненою ламаною лінією, координати вузлів якої є параметрами та ідентифікуються за допомогою алгоритму мінімізації функціонала, який характеризує середньоквадратичне відхилення значень обчислених деформацій від відповідних значень деформацій, що вимірюють у тих же самих точках спостережень. Найбільш близьким за технічною суттю є спосіб визначення передбіфуркаційного стану по наростанню дисперсії спостережуваних параметрів стану системи [2]. Для визначення точки біфуркації поведінку системи фіксують з малим кроком по часу, в кінці кожного кроку положення системи описують реалізацією випадкової величини. Для зареєстрованих значень обчислювалася дисперсія, точка насичення дисперсії приймалася за точку біфуркації. Недоліком цього способу є той факт, що ідентифікація точки біфуркації тут можлива лише за фактом насичення дисперсії, який проявляється в момент, близький до моменту вичерпання несучої здатності, що не дозволяє попередити наслідки за час, що передує моменту досягнення точки біфуркації. Задача корисної моделі полягає в зменшенні часу, який потрібно для визначення стану системи, а саме в ідентифікації моменту виникнення відшарування металевого елемента, внаслідок втрати локальної стійкості. Поставлена задача вирішується способом, в якому за спостережуваними значеннями вектора деформації внутрішньої поверхні за час, менший часу розвитку критичної деформації внаслідок втрати стійкості або нагріву системи, фіксують наявність відшарування, згідно з корисною моделлю, ідентифікацію дефекту з подальшим прогнозом уразливості визначають за час, менший часу досягнення критичного стану внаслідок аварійного впливу, всі можливі стани системи описують векторами деформацій, які обчислюють методом скінченних елементів за допомогою математичної моделі даної системи і розбивають на кластери, що описують можливі стани, ідентифікацію дефекту проводять за допомогою бінарного нейрокласифікатора, на входи якого надходять виміряні вектори спостережуваних деформацій, а на виході формулюють бінарний вектор, компоненти якого за час, менший часу досягнення критичного стану, здійснюють ідентифікацію наявності або відсутності дефекту. При кожному з можливих типів поведінки системи вектор спостережуваних деформацій належить із деякою точністю одному з кластерів, що розглядається як подія, пов'язана з наявністю уразливості, або з її відсутністю. Перевага запропонованого підходу у порівнянні з відомими полягає в тому, що здійснюється прогноз уразливості системи, що зазнає аварійного впливу, за час, суттєво менший, ніж час досягнення критичної деформації, що дозволяє використовувати систему реагування для запобігання наслідків досягнення критичної деформації. Крім цього для визначення вимірюваних значень деформацій використовують фактичний стан системи, що дозволяє в комбінації з обчислювальними алгоритмами прогнозувати можливість уразливості з достатньою точністю як за часом, так і за станом, використовуючи стандартні обчислювальні алгоритми методу скінченних елементів, методів настроювання класифікатора. При цьому запропонована послідовність операцій вимірювань і обчислень, прийнята послідовність обробки обчислюваної інформації характеризує причинно-наслідкові зв'язки між поставленою задачею і принципами корисної моделі. Виконання способу прогнозу уразливості внаслідок відшарування системи при аварійному впливі пояснюється кресленням. Він полягає в тому, що поверхня зовнішнього та внутрішнього шару - об'єкта дослідження (ОД), на яку діє можливий аварійний вплив, оснащується датчиками деформацій, що вимірюють значення деформацій у точках зовнішньої та внутрішньої поверхні, -n по яких формується вектор деформацій Е* у блоці обробки інформації (БО), блок z здійснює 1 UA 122981 U зсув одержуваної інформації на задане число кроків n за часом t, блок кластеризації (К) здійснює кластеризацію результатів розрахунків і містить інформацію у вигляді векторів ,i 1,N i деформацій , отриманих у результаті розрахунків системи методом скінченних елементів (блок ППП) протягом часу mt, m >> n, при різних аварійних впливах (А). 5 10 15 20 25 30 ,i 1,N i Порівняння значень Е* із здійснюється в блоці БП, і зазначені результати надходять на вхід нейрокласифікатора НК, навченого попередньо на інформації про характер поведінки тієї або іншої системи, використаної в кластеризаторі К. Виходом блока НК є У, компоненти якого відповідають дійсному стану (1 - система має розшарування, 0 - система не має розшарування). Час прийняття рішення визначається часом nt, тому що операції, що вимагають більшого часу - наповнення блока К і налаштування блока НК - проводяться попередньо. Блок вимірювань виконують традиційними методами, блоки кластеризації К і навчання НК використовують персональні комп'ютери, пакет прикладних програм (наприклад SOLIDWORKS, ANSYS, NASTRAN). Пропонований спосіб у порівнянні з найближчими аналогами має наступні переваги: 1. Широкий діапазон застосування: запропонованим способом можна ідентифікувати наявність розшарування під дією будь-яких термомеханічних впливів, для цього потрібно тільки зробити зміст блока К адекватним можливим станам. 2. Оперативність: пропонований спосіб дозволяє виявляти наявність розшарування у конструкції за час, суттєво менший, ніж час реалізації критичної деформації, яка припиняє функціонування системи. 3. Висока точність: пропонований спосіб використовує вимірювання деформацій, що в порівнянні з пропонованим найближчим аналогом вимірювання переміщень, для яких розрізнювальна здатність датчиків значно нижча, забезпечує більш високу точність вимірювань спостережуваних параметрів. Джерела інформації: 1. Патент на корисну модель № 87438, кл. G01B 11/16. Спосіб діагностики пошкоджень в тонких тілах. 2. Зульпукаров М.-Г.М. Обратная задача теории бифуркаций в динамических системах с шумом / М.-Г. М. Зульпукаров, Г. Г. Малинецкий, А. В. Подлазов // Препринт ИПМ им. М.В. Келдыша. - 2005. - 39 - 40 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб ідентифікації дефекту відшарування внутрішнього тонкого криволінійного металевого шару, що підкріплює зовнішній пружний шар, при аварійних впливах, в якому за спостережуваними значеннями вектора деформації внутрішньої поверхні за час, менший часу розвитку критичної деформації внаслідок втрати стійкості або нагріву системи, фіксують наявність відшарування, який відрізняється тим, що ідентифікацію дефекту з подальшим прогнозом уразливості визначають за час, менший часу досягнення критичного стану внаслідок аварійного впливу, всі можливі стани системи описують векторами деформацій, які обчислюють методом скінченних елементів за допомогою математичної моделі даної системи і розбивають на кластери, що описують можливі стани, ідентифікацію дефекту проводять за допомогою бінарного нейрокласифікатора, на входи якого надходять виміряні вектори спостережуваних деформацій, а на виході формулюють бінарний вектор, компоненти якого за час, менший часу досягнення критичного стану, здійснюють ідентифікацію наявності або відсутності дефекту. 2 UA 122981 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 11/16
Мітки: підкріплює, тонкого, аварійних, спосіб, зовнішній, криволінійного, впливах, ідентифікації, шару, пружний, внутрішнього, дефекту, шар, металевого, відшарування
Код посилання
<a href="https://ua.patents.su/5-122981-sposib-identifikaci-defektu-vidsharuvannya-vnutrishnogo-tonkogo-krivolinijjnogo-metalevogo-sharu-shho-pidkriplyueh-zovnishnijj-pruzhnijj-shar-pri-avarijjnikh-vplivakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації дефекту відшарування внутрішнього тонкого криволінійного металевого шару, що підкріплює зовнішній пружний шар, при аварійних впливах</a>
Спосіб прогнозу уразливості тонкостінних систем при аварійних впливах
Номер патенту: 117300
Опубліковано: 26.06.2017
Автори: Пацюк Анатолій Григорович, Полішко Олексій Миколайович, Адлуцький Віктор Якович, Ободан Наталія Іллівна, Громов Василь Олександрович
МПК: G01B 11/16
Мітки: впливах, аварійних, тонкостінних, систем, спосіб, прогнозу, уразливості
Формула / Реферат:
Спосіб прогнозування уразливості тонкостінних систем при аварійних впливах, у яких за спостереженими значеннями вектора деформації поверхні визначають можливість втрати функціональних властивостей систем за час, менший часу критичної деформації внаслідок втрати стійкості, аварійні впливи використовують для знаходження відгуку системи на ці впливи, як відгук тонкостінної системи виступають значення вектора деформацій, які вимірюють у заданих...
Спосіб визначення відносної зміни поверхневої енергії голчастих кристалів внаслідок появи тонкого металевого шару покриття
Номер патенту: 103599
Опубліковано: 25.12.2015
Автор: Левандовський Борис Іванович
МПК: B82B 1/00
Мітки: зміни, внаслідок, відносної, кристалів, тонкого, спосіб, енергії, визначення, металевого, появи, поверхневої, покриття, шару, голчастих
Формула / Реферат:
1. Спосіб визначення відносної зміни поверхневої енергії голчастих кристалів внаслідок появи тонкого шару металевого покриття, який відрізняється тим, що чисельне значення величини знаходять завдяки вимірюванню параметрів діючого електричного поля на зразок в польовому іонному мікроскопі (ПІМ), причому шукану величину розраховують за формулою:γ2/γ1=(U02/U01),2 (1)де U01 та U02 - напруги електричного поля під час...
Спосіб визначення пошкодженості поверхневого шару металевого досліджуваного об’єкта із застосуванням сканувальної системи
Номер патенту: 38373
Опубліковано: 12.01.2009
Автори: Бялонович Андрій Володимирович, Васинюк Іван Мойсейович, Войналович Олександр Володимирович, Писаренко Георгій Георгійович
МПК: G01R 19/00, G01N 27/00
Мітки: системі, досліджуваного, об'єкта, визначення, шару, металевого, спосіб, поверхневого, сканувальної, застосуванням, пошкодженості
Формула / Реферат:
Спосіб визначення пошкодженості поверхневого шару металевого досліджуваного об'єкта із застосуванням сканувальної системи, яка містить датчик та позиціонувально-виконавчий пристрій з системою обробки та візуалізації даних, що включає переміщування датчика сканувальної системи по заданій траєкторії по поверхні досліджуваного об'єкта з одночасним генеруванням зондувальних сигналів, якими сканують поверхню металевого досліджуваного об'єкта та...
Вихрострумовий спосіб визначення глибини дефекту і залишкової товщини непошкодженого шару тонкостінних конструкцій із неферомагнітних матеріалів

Номер патенту: 58836
Опубліковано: 26.04.2011
Автор: Учанін Валентин Миколайович
МПК: G01N 27/90
Мітки: товщини, неферомагнітних, непошкодженого, спосіб, глибини, матеріалів, конструкцій, шару, визначення, залишкової, дефекту, тонкостінних, вихрострумовий
Формула / Реферат:
1. Вихрострумовий спосіб визначення глибини дефекту і залишкової товщини непошкодженого шару тонкостінних конструкцій із неферомагнітних матеріалів, при якому сканують контрольовану поверхню вихрострумовим диференційним перетворювачем з двома зустрічно включеними обмотками, спостерігають зміни сигналу вихрострумового перетворювача в процесі сканування, виділяють складову сигналу, обумовлену дефектом і, по перевищенню сигналу від дефекту...
Спосіб виявлення дефекту стінки порожнистого внутрішнього органа
Номер патенту: 50521
Опубліковано: 15.10.2002
Автори: Луцук Олексій Спиридонович, Лойко Ігор Кирилович
МПК: A61B 6/08
Мітки: спосіб, виявлення, внутрішнього, органа, стінки, дефекту, порожнистого
Формула / Реферат:
Спосіб виявлення дефекту стінки порожнистого внутрішнього органа, який включає здійснення візуального контролю, який відрізняється тим, що візуальний контроль проводять з додатковою діафаноскопією, причому світловий потік спрямовують зсередини порожнистого органа.