Регульований телескопічний механізм
Номер патенту: 21342
Опубліковано: 15.03.2007
Автори: Михайленко Олександр Миколайович, Муравченко Олег Федорович, Марков Михайло Петрович, Гончарова Тетяна Миколаївна, Машкін Василь Павлович, Кравченко Ігор Федорович

Формула / Реферат
1. Регульований телескопічний механізм, що містить зовнішню і внутрішню обойми і подовжні гвинтові пари, що включають гайку і взаємозв'язаний із приводом гвинт, який відрізняється тим, що обойми додатково взаємозв'язані між собою обводовими рядами опор кочення, причому гайка гвинтової пари виконана як одне ціле з внутрішньою обоймою.
2. Регульований телескопічний механізм за п. 1, який відрізняється тим, що взаємозв'язок гвинта згаданої гвинтової пари з приводом здійснений одним його кінцем через сполучну муфту і радіально-упорний підшипник, встановлений у зовнішній обоймі, причому іншим кінцем згаданий гвинт взаємозв'язаний із додатковим радіально-упорним підшипником у внутрішній обоймі.
3. Регульований телескопічний механізм за п. 2, який відрізняється тим, що гайка згаданої гвинтової пари взаємозв'язана з одним із рядів згаданих опор кочення.
4. Регульований телескопічний механізм за п. 3, який відрізняється тим, що згадана внутрішня обойма з'єднана з проміжною муфтою, що далі з'єднана з додатковими, послідовно розміщеними, внутрішньою обоймою з убудованою в останню гайкою гвинтової пари на рядах опор кочення і радіально-упорним підшипником, із яким взаємозв'язаний гвинт згаданої додаткової гвинтової пари.
5. Регульований телескопічний механізм за будь-яким з пп. 1-4, який відрізняється тим, що підшипники гвинтів гвинтових пар установлені у внутрішніх обоймах за допомогою пружних опор.
Текст
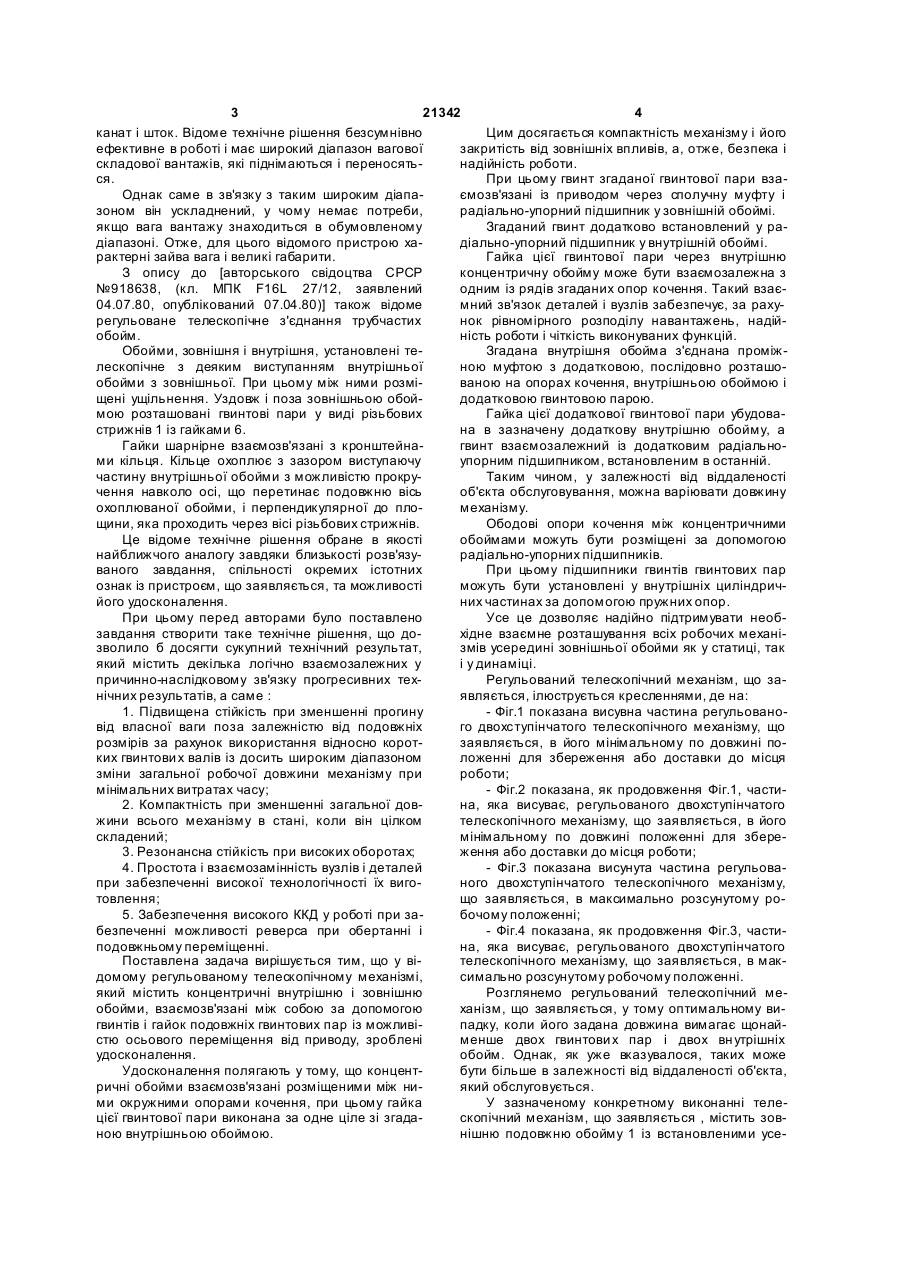
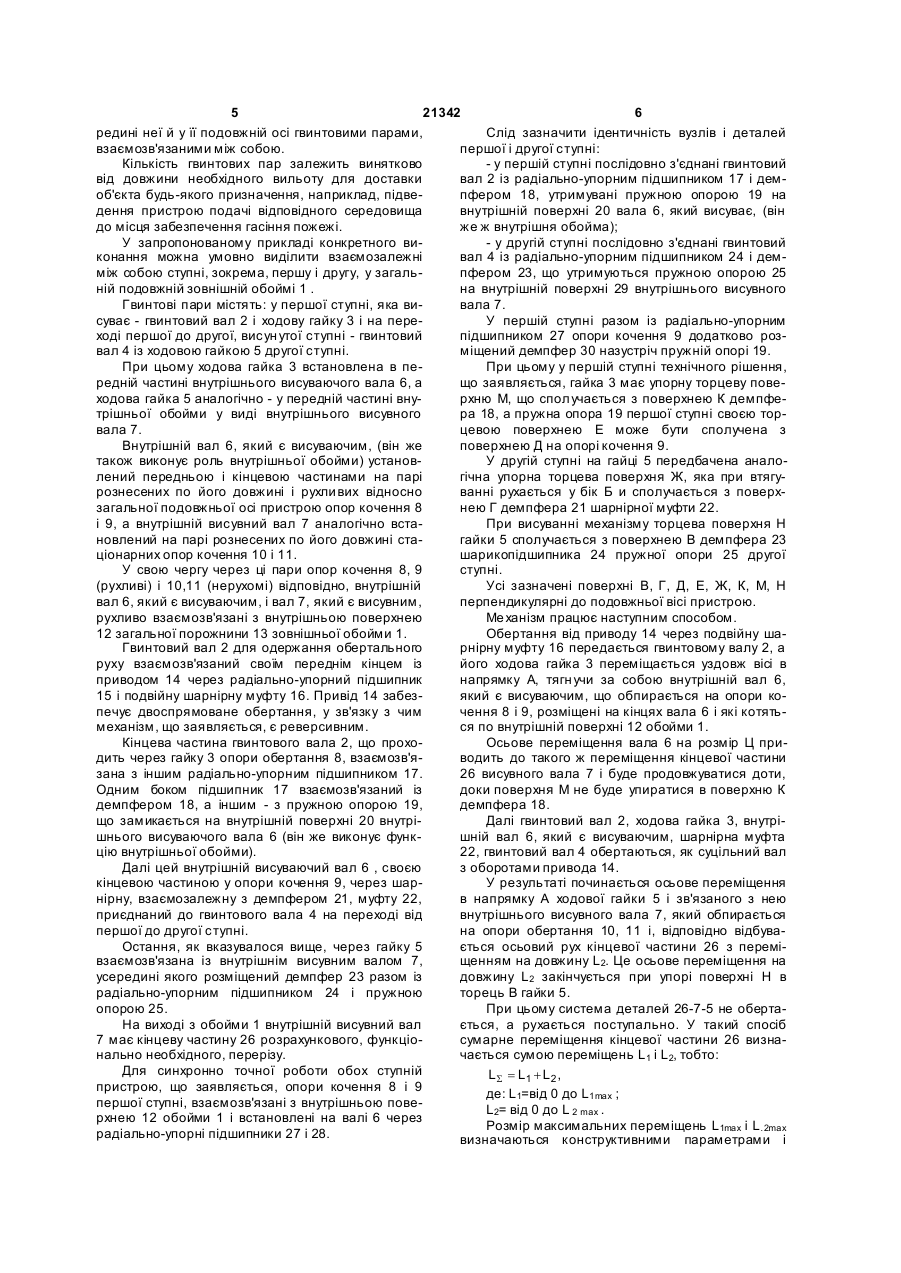
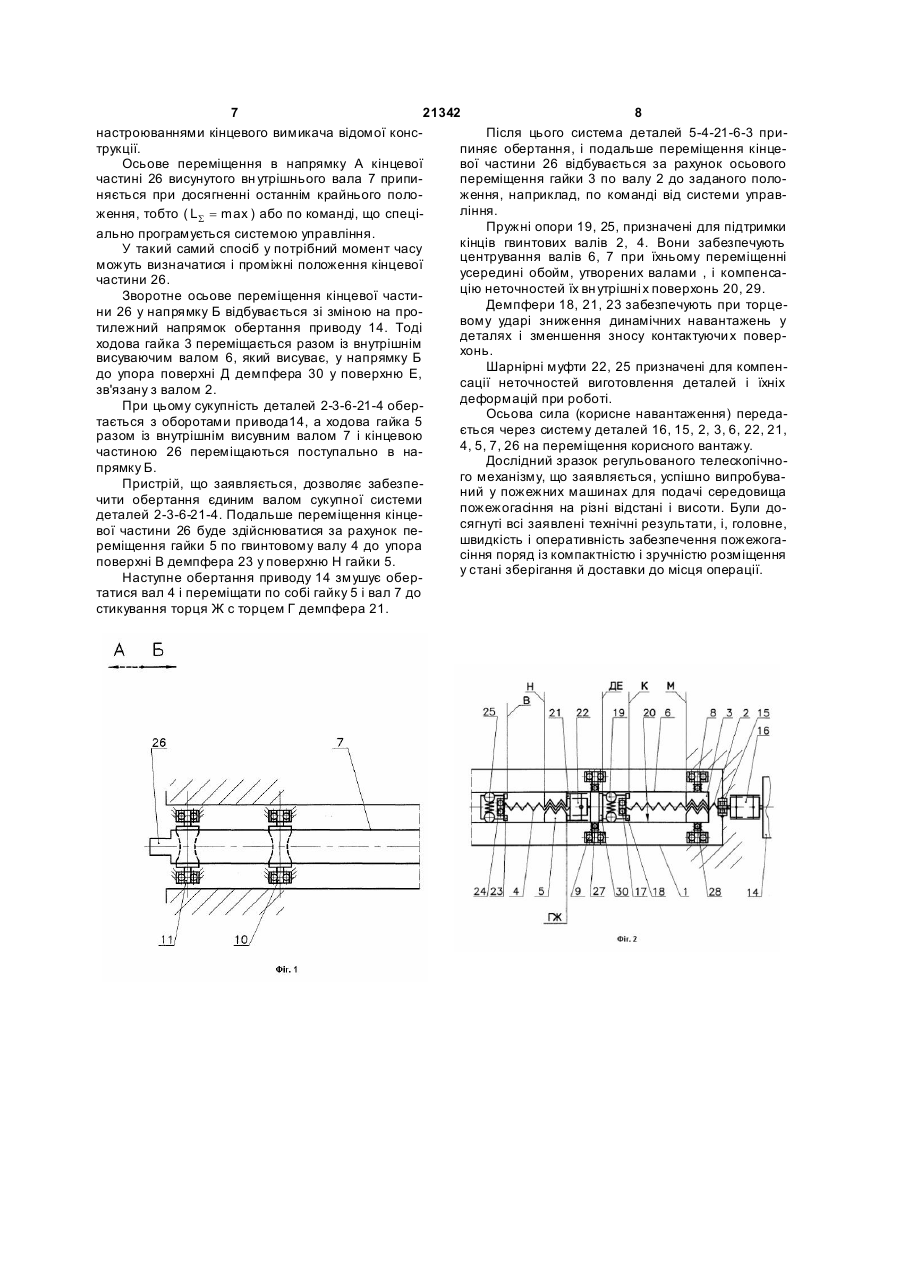
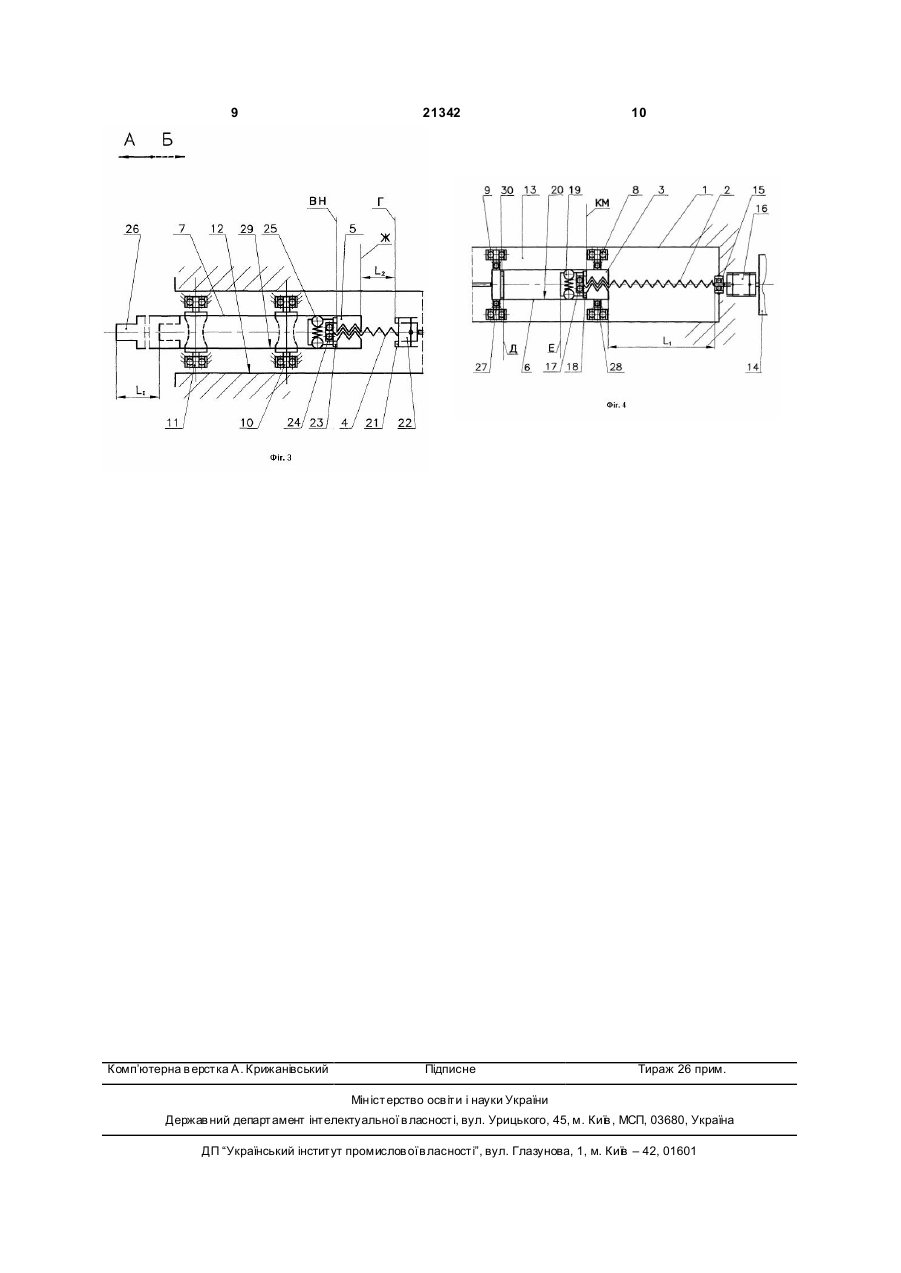
1. Регульований телескопічний механізм, що містить зовнішню і внутрішню обойми і подовжні гвинтові пари, що включають гайку і взаємозв'язаний із приводом гвинт, який відрізняється тим, що обойми додатково взаємозв'язані між собою обводовими рядами опор кочення, причому гайка гвинтової пари виконана як одне ціле з внутрішньою обоймою. 2. Регульований телескопічний механізм за п. 1, який відрізняється тим, що взаємозв'язок гвинта згаданої гвинтової пари з приводом здійснений U 2 (19) 1 3 21342 4 канат і шток. Відоме технічне рішення безсумнівно Цим досягається компактність механізму і його ефективне в роботі і має широкий діапазон вагової закритість від зовнішніх впливів, а, отже, безпека і складової вантажів, які піднімаються і переносятьнадійність роботи. ся. При цьому гвинт згаданої гвинтової пари взаОднак саме в зв'язку з таким широким діапаємозв'язані із приводом через сполучну муфту і зоном він ускладнений, у чому немає потреби, радіально-упорний підшипник у зовнішній обоймі. якщо вага вантажу знаходиться в обумовленому Згаданий гвинт додатково встановлений у радіапазоні. Отже, для цього відомого пристрою хадіально-упорний підшипник у внутрішній обоймі. рактерні зайва вага і великі габарити. Гайка цієї гвинтової пари через внутрішню З опису до [авторського свідоцтва СРСР концентричну обойму може бути взаємозалежна з №918638, (кл. МПК F16L 27/12, заявлений одним із рядів згаданих опор кочення. Такий взає04.07.80, опублікований 07.04.80)] також відоме мний зв'язок деталей і вузлів забезпечує, за рахурегульоване телескопічне з'єднання трубчастих нок рівномірного розподілу навантажень, надійобойм. ність роботи і чіткість виконуваних функцій. Обойми, зовнішня і внутрішня, установлені теЗгадана внутрішня обойма з'єднана проміжлескопічне з деяким виступанням внутрішньої ною муфтою з додатковою, послідовно розташообойми з зовнішньої. При цьому між ними розміваною на опорах кочення, внутрішньою обоймою і щені ущільнення. Уздовж і поза зовнішньою обойдодатковою гвинтовою парою. мою розташовані гвинтові пари у виді різьбових Гайка цієї додаткової гвинтової пари убудовастрижнів 1 із гайками 6. на в зазначену додаткову внутрішню обойму, а Гайки шарнірне взаємозв'язані з кронштейнагвинт взаємозалежний із додатковим радіальноми кільця. Кільце охоплює з зазором виступаючу упорним підшипником, встановленим в останній. частину внутрішньої обойми з можливістю прокруТаким чином, у залежності від віддаленості чення навколо осі, що перетинає подовжню вісь об'єкта обслуговування, можна варіювати довжину охоплюваної обойми, і перпендикулярної до пломеханізму. щини, яка проходить через вісі різьбових стрижнів. Ободові опори кочення між концентричними Це відоме технічне рішення обране в якості обоймами можуть бути розміщені за допомогою найближчого аналогу завдяки близькості розв'язурадіально-упорних підшипників. ваного завдання, спільності окремих істотних При цьому підшипники гвинтів гвинтових пар ознак із пристроєм, що заявляється, та можливості можуть бути установлені у внутрішніх циліндричйого удосконалення. них частинах за допомогою пружних опор. При цьому перед авторами було поставлено Усе це дозволяє надійно підтримувати необзавдання створити таке технічне рішення, що дохідне взаємне розташування всіх робочих механізволило б досягти сукупний технічний результат, змів усередині зовнішньої обойми як у статиці, так який містить декілька логічно взаємозалежних у і у динаміці. причинно-наслідковому зв'язку прогресивних техРегульований телескопічний механізм, що занічних результатів, а саме : являється, ілюструється кресленнями, де на: 1. Підвищена стійкість при зменшенні прогину - Фіг.1 показана висувна частина регульовановід власної ваги поза залежністю від подовжніх го двохступінчатого телескопічного механізму, що розмірів за рахунок використання відносно коротзаявляється, в його мінімальному по довжині поких гвинтови х валів із досить широким діапазоном ложенні для збереження або доставки до місця зміни загальної робочої довжини механізму при роботи; мінімальних витратах часу; - Фіг.2 показана, як продовження Фіг.1, части2. Компактність при зменшенні загальної довна, яка висуває, регульованого двохступінчатого жини всього механізму в стані, коли він цілком телескопічного механізму, що заявляється, в його складений; мінімальному по довжині положенні для збере3. Резонансна стійкість при високих оборотах; ження або доставки до місця роботи; 4. Простота і взаємозамінність вузлів і деталей- Фіг.3 показана висунута частина регульовапри забезпеченні високої технологічності їх вигоного двохступінчатого телескопічного механізму, товлення; що заявляється, в максимально розсунутому ро5. Забезпечення високого ККД у роботі при забочому положенні; безпеченні можливості реверса при обертанні і - Фіг.4 показана, як продовження Фіг.3, частиподовжньому переміщенні. на, яка висуває, регульованого двохступінчатого Поставлена задача вирішується тим, що у вітелескопічного механізму, що заявляється, в макдомому регульованому телескопічному механізмі, симально розсунутому робочому положенні. який містить концентричні внутрішню і зовнішню Розглянемо регульований телескопічний меобойми, взаємозв'язані між собою за допомогою ханізм, що заявляється, у тому оптимальному вигвинтів і гайок подовжніх гвинтових пар із можливіпадку, коли його задана довжина вимагає щонайстю осьового переміщення від приводу, зроблені менше двох гвинтови х пар і двох вн утрішніх удосконалення. обойм. Однак, як уже вказувалося, таких може Удосконалення полягають у тому, що концентбути більше в залежності від віддаленості об'єкта, ричні обойми взаємозв'язані розміщеними між ниякий обслуговується. ми окружними опорами кочення, при цьому гайка У зазначеному конкретному виконанні телецієї гвинтової пари виконана за одне ціле зі згадаскопічний механізм, що заявляється , містить зовною внутрішньою обоймою. нішню подовжню обойму 1 із встановленими усе 5 21342 6 редині неї й у її подовжній осі гвинтовими парами, Слід зазначити ідентичність вузлів і деталей взаємозв'язаними між собою. першої і другої ступні: Кількість гвинтових пар залежить винятково - у першій ступні послідовно з'єднані гвинтовий від довжини необхідного вильоту для доставки вал 2 із радіально-упорним підшипником 17 і демоб'єкта будь-якого призначення, наприклад, підвепфером 18, утримувані пружною опорою 19 на дення пристрою подачі відповідного середовища внутрішній поверхні 20 вала 6, який висуває, (він до місця забезпечення гасіння пожежі. же ж внутрішня обойма); У запропонованому прикладі конкретного ви- у другій ступні послідовно з'єднані гвинтовий конання можна умовно виділити взаємозалежні вал 4 із радіально-упорним підшипником 24 і демміж собою ступні, зокрема, першу і другу, у загальпфером 23, що утримуються пружною опорою 25 ній подовжній зовнішній обоймі 1 . на внутрішній поверхні 29 внутрішнього висувного Гвинтові пари містять: у першої ступні, яка вивала 7. суває - гвинтовий вал 2 і ходову гайку 3 і на переУ першій ступні разом із радіально-упорним ході першої до другої, висун утої ступні - гвинтовий підшипником 27 опори кочення 9 додатково розвал 4 із ходовою гайкою 5 другої ступні. міщений демпфер 30 назустріч пружній опорі 19. При цьому ходова гайка 3 встановлена в пеПри цьому у першій ступні технічного рішення, редній частині внутрішнього висуваючого вала 6, а що заявляється, гайка 3 має упорну торцеву повеходова гайка 5 аналогічно - у передній частині внурхню М, що сполучається з поверхнею К демпфетрішньої обойми у виді внутрішнього висувного ра 18, а пружна опора 19 першої ступні своєю торвала 7. цевою поверхнею Е може бути сполучена з Внутрішній вал 6, який є висуваючим, (він же поверхнею Д на опорі кочення 9. також виконує роль внутрішньої обойми) установУ другій ступні на гайці 5 передбачена аналолений передньою і кінцевою частинами на парі гічна упорна торцева поверхня Ж, яка при втягурознесених по його довжині і рухли вих відносно ванні рухається у бік Б и сполучається з поверхзагальної подовжньої осі пристрою опор кочення 8 нею Г демпфера 21 шарнірної муфти 22. і 9, а внутрішній висувний вал 7 аналогічно встаПри висуванні механізму торцева поверхня Н новлений на парі рознесених по його довжині стагайки 5 сполучається з поверхнею В демпфера 23 ціонарних опор кочення 10 і 11. шарикопідшипника 24 пружної опори 25 другої У свою чергу через ці пари опор кочення 8, 9 ступні. (рухливі) і 10,11 (нерухомі) відповідно, внутрішній Усі зазначені поверхні В, Г, Д, Е, Ж, К, М, Н вал 6, який є висуваючим, і вал 7, який є висувним, перпендикулярні до подовжньої вісі пристрою. рухливо взаємозв'язані з внутрішньою поверхнею Ме ханізм працює наступним способом. 12 загальної порожнини 13 зовнішньої обойми 1. Обертання від приводу 14 через подвійну шаГвинтовий вал 2 для одержання обертального рнірну муфту 16 передається гвинтовому валу 2, а руху взаємозв'язаний своїм переднім кінцем із його ходова гайка 3 переміщається уздовж вісі в приводом 14 через радіально-упорний підшипник напрямку А, тягн учи за собою внутрішній вал 6, 15 і подвійну шарнірну муфту 16. Привід 14 забезякий є висуваючим, що обпирається на опори копечує двоспрямоване обертання, у зв'язку з чим чення 8 і 9, розміщені на кінцях вала 6 і які котятьмеханізм, що заявляється, є реверсивним. ся по внутрішній поверхні 12 обойми 1. Кінцева частина гвинтового вала 2, що прохоОсьове переміщення вала 6 на розмір Ц придить через гайку 3 опори обертання 8, взаємозв'яводить до такого ж переміщення кінцевої частини зана з іншим радіально-упорним підшипником 17. 26 висувного вала 7 і буде продовжуватися доти, Одним боком підшипник 17 взаємозв'язаний із доки поверхня М не буде упиратися в поверхню К демпфером 18, а іншим - з пружною опорою 19, демпфера 18. що замикається на внутрішній поверхні 20 внутріДалі гвинтовий вал 2, ходова гайка 3, внутрішнього висуваючого вала 6 (він же виконує функшній вал 6, який є висуваючим, шарнірна муфта цію внутрішньої обойми). 22, гвинтовий вал 4 обертаються, як суцільний вал Далі цей внутрішній висуваючий вал 6 , своєю з оборотами привода 14. кінцевою частиною у опори кочення 9, через шарУ результаті починається осьове переміщення нірну, взаємозалежну з демпфером 21, муфту 22, в напрямку А ходової гайки 5 і зв'язаного з нею приєднаний до гвинтового вала 4 на переході від внутрішнього висувного вала 7, який обпирається першої до другої ступні. на опори обертання 10, 11 і, відповідно відбуваОстання, як вказувалося вище, через гайку 5 ється осьовий рух кінцевої частини 26 з перемівзаємозв'язана із внутрішнім висувним валом 7, щенням на довжину L2. Це осьове переміщення на усередині якого розміщений демпфер 23 разом із довжину L2 закінчується при упорі поверхні Н в радіально-упорним підшипником 24 і пружною торець В гайки 5. опорою 25. При цьому система деталей 26-7-5 не обертаНа виході з обойми 1 внутрішній висувний вал ється, а рухається поступально. У такий спосіб 7 має кінцеву частину 26 розрахункового, функціосумарне переміщення кінцевої частини 26 визнанально необхідного, перерізу. чається сумою переміщень L1 і L2, тобто: Для синхронно точної роботи обох ступній LS = L1 + L2 , пристрою, що заявляється, опори кочення 8 і 9 де: L1=від 0 до L1max ; першої ступні, взаємозв'язані з внутрішньою повеL2= від 0 до L 2 max . рхнею 12 обойми 1 і встановлені на валі 6 через Розмір максимальних переміщень L1max і L.2max радіально-упорні підшипники 27 і 28. визначаються конструктивними параметрами і 7 21342 8 настроюваннями кінцевого вимикача відомої консПісля цього система деталей 5-4-21-6-3 притрукції. пиняє обертання, і подальше переміщення кінцеОсьове переміщення в напрямку А кінцевої вої частини 26 відбувається за рахунок осьового частині 26 висунутого вн утрішнього вала 7 припипереміщення гайки 3 по валу 2 до заданого полоняється при досягненні останнім крайнього положення, наприклад, по команді від системи управління. ження, тобто ( LS = max ) або по команді, що спеціПружні опори 19, 25, призначені для підтримки ально програмується системою управління. кінців гвинтових валів 2, 4. Вони забезпечують У такий самий спосіб у потрібний момент часу центрування валів 6, 7 при їхньому переміщенні можуть визначатися і проміжні положення кінцевої усередині обойм, утворених валами , і компенсачастини 26. цію неточностей їх вн утрішні х поверхонь 20, 29. Зворотне осьове переміщення кінцевої частиДемпфери 18, 21, 23 забезпечують при торцени 26 у напрямку Б відбувається зі зміною на провому ударі зниження динамічних навантажень у тилежний напрямок обертання приводу 14. Тоді деталях і зменшення зносу контактуючи х поверходова гайка 3 переміщається разом із внутрішнім хонь. висуваючим валом 6, який висуває, у напрямку Б Шарнірні муфти 22, 25 призначені для компендо упора поверхні Д демпфера 30 у поверхню Е, сації неточностей виготовлення деталей і їхніх зв'язану з валом 2. деформацій при роботі. При цьому сукупність деталей 2-3-6-21-4 оберОсьова сила (корисне навантаження) передатається з оборотами привода14, а ходова гайка 5 ється через систему деталей 16, 15, 2, 3, 6, 22, 21, разом із внутрішнім висувним валом 7 і кінцевою 4, 5, 7, 26 на переміщення корисного вантажу. частиною 26 переміщаються поступально в наДослідний зразок регульованого телескопічнопрямку Б. го механізму, що заявляється, успішно випробуваПристрій, що заявляється, дозволяє забезпений у пожежних машинах для подачі середовища чити обертання єдиним валом сукупної системи пожежогасіння на різні відстані і висоти. Були додеталей 2-3-6-21-4. Подальше переміщення кінцесягнуті всі заявлені технічні результати, і, головне, вої частини 26 буде здійснюватися за рахунок пешвидкість і оперативність забезпечення пожежогареміщення гайки 5 по гвинтовому валу 4 до упора сіння поряд із компактністю і зручністю розміщення поверхні В демпфера 23 у поверхню Н гайки 5. у стані зберігання й доставки до місця операції. Наступне обертання приводу 14 змушує обертатися вал 4 і переміщати по собі гайку 5 і вал 7 до стикування торця Ж с торцем Г демпфера 21. 9 Комп’ютерна в ерстка А. Крижанівський 21342 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled telescopic mechanism
Автори англійськоюKravchenko Ihor Fedorovych, Muravchenko Oleh Fedorovych, Mashkin Vasyl Pavlovych
Назва патенту російськоюРегулируемый телескопический механизм
Автори російськоюКравченко Игорь Федорович, Муравченко Олег Федорович, Машкин Василий Павлович
МПК / Мітки
МПК: F16C 3/02, F16L 27/12, B66C 23/687, E04H 12/18
Мітки: регульованій, механізм, телескопічний
Код посилання
<a href="https://ua.patents.su/5-21342-regulovanijj-teleskopichnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Регульований телескопічний механізм</a>
Регульований кривошипний механізм
Номер патенту: 65226
Опубліковано: 15.03.2004
Автори: Амбарцумянц Рубен Робертович, Ліпін Андрій Павлович
МПК: F16H 57/00
Мітки: механізм, кривошипний, регульованій
Формула / Реферат:
Регульований кривошипний механізм, що містить корпус, привідний вал, встановлений у ньому кривошипний вал із кривошипом, гвинтове сполучення, механізм приводу гвинта, який відрізняється тим, що на привідному валу виконані два діаметрально протилежних подовжніх отвори, в один з яких встановлений кривошипний вал із жорстко з'єднаними з ним двома противагами динамічного зрівноважування і кривошипом, співвісно з яким виконано подовжній внутрішній...
Нарізний механізм
Номер патенту: 43105
Опубліковано: 15.11.2001
Автори: Гевко Богдан Матвійович, Пилипець Михайло Ількович, Гевко Іван Богданович, Гудь Віктор Зеновійович
МПК: F16B 33/00
Формула / Реферат:
Нарізний механізм, що виконаний у вигляді пари гвинт-гайка, на зовнішньому діаметрі гвинта нарізана різь, на яку нагвинчена гайка, який відрізняється тим, що гайка виконана у вигляді циліндричного пустотілого корпусу, лівий торець якого має отвір більший внутрішнього діаметра різі, внутрішній торець корпусу в контакті з тарілчастими пружинами, які, в свою чергу, з другого боку в контакті зі спіральною штабою, внутрішній діаметр якої має...
Гвинтовий механізм

Номер патенту: 43104
Опубліковано: 15.11.2001
Автори: Гевко Іван Богданович, Гудь Віктор Зеновійович, Гевко Богдан Матвійович, Пилипець Михайло Ількович
МПК: F16B 33/00
Формула / Реферат:
Гвинтовий механізм, що виконаний у вигляді пари гвинт-гайка, на зовнішньому діаметрі гвинта нарізана різь, на яку нагвинчена гайка, який відрізняється тим, що гайка виконана у вигляді циліндричного пустотілого корпусу, лівий торець якого має отвір більший внутрішнього діаметра різі, внутрішній торець корпусу є в контакті з спіральною гайкою, внутрішній діаметр якої має профіль різі вала і є в контакті з ним, причому витки спіральної гайки...
Телескопічний стояк опалубки перекриттів

Номер патенту: 13007
Опубліковано: 15.03.2006
Автори: Квасов Андрій Олександрович, Гороховський В'ячеслав Павлович, Білянський Михайло Федорович
МПК: E04G 11/56, E04G 25/00
Мітки: телескопічний, стояк, перекриттів, опалубки
Формула / Реферат:
1. Телескопічний стояк опалубки перекриттів, що містить верхню висувну частину, забезпечену опорою оголовка і рядом отворів, розташованих уздовж її осі із певним кроком, і нижню частину, на нижньому кінці якої приварена опорна плита, а на верхньому виконана різьба із подовжнім пазом, на яку установлена із можливістю переміщення гайка, опорною поверхнею взаємодіюча із фіксатором, установленим в подовжньому пазу і в одному з отворів,...
Гідравлічний телескопічний амортизатор
Номер патенту: 9629
Опубліковано: 17.10.2005
Автор: Сабат Антон Васильович
МПК: B62D 61/00
Мітки: телескопічний, гідравлічний, амортизатор
Формула / Реферат:
Гідравлічний телескопічний амортизатор, що містить кожух, в якому розташовані резервуар, циліндр, що містить шток з поршнем, в якому виконані клапан віддачі, клапан стиску, який відрізняється тим, що додатково містить калібровані отвори, що відкриті і розміщені у верхній і нижній частинах циліндра, при цьому калібровані отвори виконані в клапанах зворотної дії, а на поршні і в нижній частині циліндра розміщені запобіжні клапани віддачі і...
Попередній патент: Спосіб створення дисконтної системи
Наступний патент: Спосіб регулювання розвитку патологічних процесів вірусного раку картоплі
Випадковий патент: Посібник для навчання іноземних мов