Привод з замкнутим кінематичним ланцюгом
Номер патенту: 25016
Опубліковано: 25.12.1998
Автори: Захарченко Валерій Іванович, Дятел Микола Микитович, Снісаренко Іван Миколайович, Синяговський Іван Іванович
Формула / Реферат
Привод с замкнутой кинематической цепью, содержащий ведущий и ведомый элементы, зубчатую планетарную передачу, одно из кинематических звеньев которой непосредственно связано с ведомым элементом, механизм изменения передаточного отношения и механизм прижима контактирующих поверхностей, отличающийся тем, что он снабжен вторым ведомым элементом, непосредственно связанным со вторым кинематическим звеном зубчатой планетарной передачи, а третье кинематическое звено зубчатой планетарной передачи непосредственно связано с выходным валом привода, ведомые элементы выполнены с коническими контактирующими поверхностями, имеющими разные расчетные диаметры и ширину дорожек качения, и расположены несимметрично относительно оси вращения ведущего элемента, который выполнен со сферической поверхностью, взаимодействующей с коническими поверхностями ведомых элементов с возможностью перемещения ведущего элемента относительно ведомых, механизм изменения передаточного отношения выполнен в виде поворотной плиты с осью поворота, продолжение которой совпадает с центром сферической поверхности ведущего элемента, а механизм прижима контактирующих поверхностей содержит установленную на поворотной плите подвижную плиту с установленным на ней упомянутым ведущим элементом, упоры, жестко закрепленные на поворотной плите, и пружины, упирающиеся в упоры и в поворотную плиту.
Текст
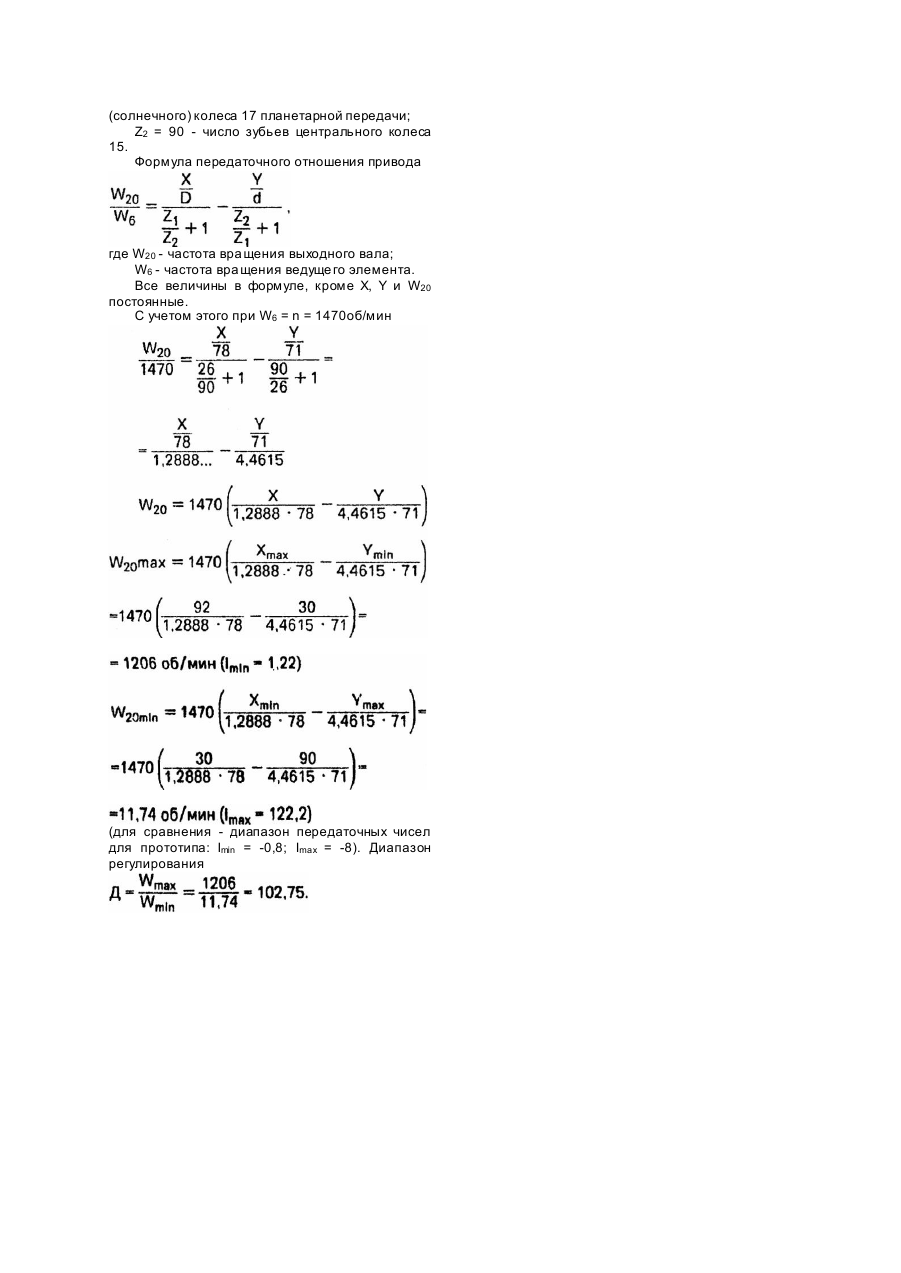
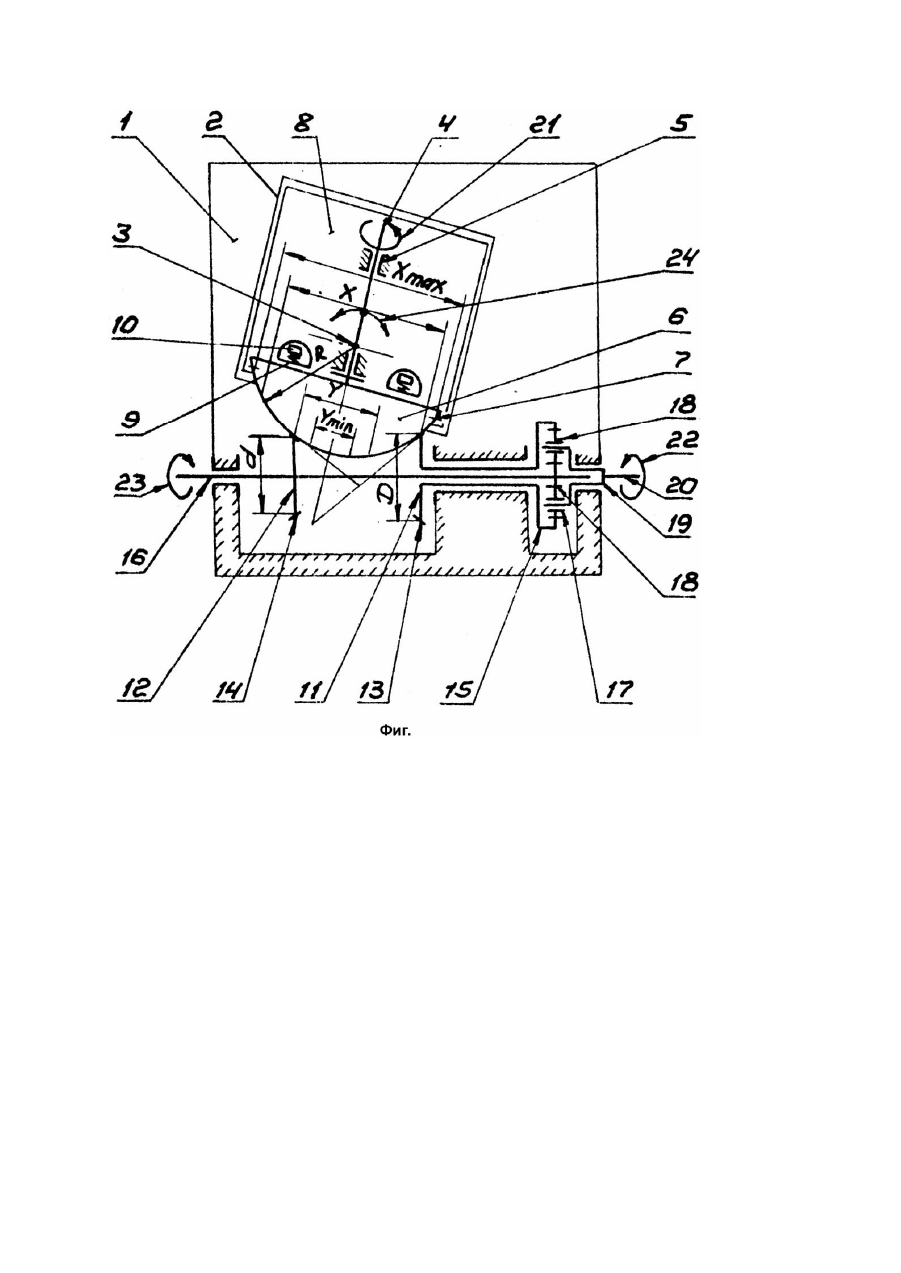
Изобретение относится к машиностроению и может быть применено в различных его областях, например, в станкостроении, где требуется использовать широкий диапазон частот вращения выходного элемента привода без усложнения какой бы то ни было (например, электрической или гидравлической) системы машины. Известны приводы, основной частью которых являются фрикционные варианты, замкнутые механизмами с зубчатыми зацеплениями, например, дифференциалами или планетарными передачами. Как правило, один элемент замыкающей цепи соединен с выходным звеном вариатора, а второй - с входным элементом привода или же с выходным элементом независимо регулируемого привода, являющегося задающим устройством. Известен приводе замкнутой кинематической цепью, содержащий вариатор, включающий три элемента, из которых один ведущий, второй ведомый, введенные в контакт между собой посредством одного из них, установленного с возможностью перемещения относительно двух други х, механизм изменения передаточного отношения, механизм прижима контактирующих поверхностей и зубчатую планетарную передачу, два кинематических звена которой непосредственно связаны с двумя элементами вариатора, из которых один ведомый. Диапазон регулирования данного привода сравнительно небольшой, что делает бесполезным его применение в устройства х, требующих диапазона передаточных чисел значительно большего, например, в механизмах подач станков. В основу изобретения поставлена задача в приводе с замкнутой кинематической цепью, содержащем вариатор, включающий три элемента, из которых один ведущий, второй ведомый, введены в контакт между собой посредством одного из них, механизм изменения передаточного отношения, механизм прижима контактирующих поверхностей и зубчатую планетарную передачу, два кинематических звена которой непосредственно связаны с двумя элементами вариатора, из которых один ведомый, путем снабжения вариатора вторым ведомым элементом, связанным со вторым кинематическим звеном зубчатой планетарной передачи и непосредственной связи выходного элемента привода с третьим кинематическим звеном планетарной передачи обеспечить большой диапазон бесступенчатого регулирования частоты вращения выходного элемента привода. Поставленная задача решается тем, что в предложенном приводе, содержащем ведущий и ведомый элементы, зубчатую планетарную передачу, одно из кинематических звеньев которой непосредственно связано с ведомым элементом, механизм изменения передаточного отношения и механизм прижима контактирующих поверхностей, согласно изобретению, привод снабжен вторым ведомым элементом, непосредственно связанным со вторым кинематическим звеном зубчатой планетарной передачи, а третье кинематическое звено зубчатой планетарной передачи непосредственно связано с выходным валом привода, ведомые элементы выполнены с коническими контактирующими поверхностями, имеющими разные расчетные диаметры и ширину дорожек качения, и расположенные несимметрично относительно оси вращения ведущего элемента, который выполнен со сферической поверхностью, взаимодействующей с коническими поверхностями ведомых элементов с возможностью перемещения ведущего элемента относительно ведомых, механизм изменения передаточного отношения выполнен в виде поворотной плиты с осью поворота, продолжение которой совпадает с центром сферической поверхности ведущего элемента, а механизм прижима контактирующи х поверхностей содержит установленную на поворотной плите подвижную плиту с установленным на ней упомянутым ведущим элементом, упоры, жестко закрепленные на поворотной плите, и пружины, упирающиеся в упоры и в поворотную плиту. Это делает возможным получить большой диапазон плавно изменяющихся передаточных отношений с помощью одного устройства, так как по сравнению с прототипом в предложенном приводе два (в прототипе одно) звена замыкающей передачи кинематически связаны с элементами вариатора, причем так, что изменение частоты их вращения синхронно и противоположно по значению. На чертеже (фиг.) показана кинематическая схема предлагаемого привода с обозначением основных элементов и параметров. На корпусе 1 установлена плита 2 с возможностью поворота вокруг оси 3, продолжение которой перпендикулярно пересекается с осью вала 4, установленного в подшипниках 5 и несущего ведущий элемент 6 со сферической контактирующей (рабочей) поверхностью 7. Элементы 2 и 3 образуют механизм изменения передаточного отношения. На поворотной плите 2 установлена подвижная плита 8, находящаяся под воздействием пружин 9, упирающихся в плиту 8 и упоры 10, жестко закрепленные на плите 2. Элементы 8, 9 и 10 составляют механизм прижима контактирующих поверхностей. В плотном контакте с поверхностью 7 ведущего элемента б находятся элементы 11 и 12, имеющие с поверхностью 7 контакты по коническим поверхностям 13 и 14. Ведомый элемент 11 жестко соединен с центральным (планетарным) зубчатым колесом 15 планетарной передачи, а ведомый элемент 12 - с валом 16, который составляет одно целое с внутренним (солнечным) зубчатым колесом 17 планетарной передачи. С колесами 15 и 17 находятся в зацеплении сателлиты 18, установленные с возможностью вращения на водиле 19, имеющем удлиненный хвостовик 20, являющийся выходным валом привода. Оси вращения ведущего и ведомых элементов расположены в одной плоскости. Привод работает следующим образом. При вращении вала 4 (в оптимальном варианте это ротор асинхронного электродвигателя), например, в направлении 21, ведущий элемент 6 сообщает вращение ведомым элементам 11 и 12 вследствие фрикционной связи поверхностей 7, 13 и 14. Так как ведомые элементы расположены по разные стороны от оси вращения вала 4, направления их вращения 22 и 23 противоположные. При постоянной частоте вращения ведущего элемента изменение частоты вращения вала 20 возможно путем изменения положения поворотной плиты 2 в направлении изогнутой реверсивной стрелки 24. Вследствие этого изменяются расчетные диаметры X и Y дорожек качения на ведущем элементе. Суммирование частот вращения обоих ведомых элементов происходит в замыкающей планетарной передаче, а результирующая частота вращения получается на водиле 19 (выходном вале 20) - третьем звене зубчатой планетарной передачи. Изменение частоты вращения выходного вала 20 происходит за счет синхронного изменения частот вращения обоих ведомых элементов (11 и 12), причем повышение частоты вращения одного из них ведет к снижению ее у другого ведомого элемента. Это позволяет получить большой диапазон регулирования с помощью привода с небольшими габаритами. В приводе возможно достичь реверсирование, однако эта цель не преследуется, и, следовательно, направление вращения выходного вала 20 в большинстве случаев совпадает с направлением вращения 22 ведомого элемента. В приводе имеются условия для циркуляции мощности, так как при сопротивлении вращению водила 19 (выходного вала 20) реакция в зубчатом зацеплении 18 - 17 направлена в сторону ускорения вращения звена 17 и связанного с ним валом 16 ведомого элемента 12, который влияет на ведущий элемент 6 также ускоряюще. Однако эта мощность небольшая, не ухудшает стабильность работы привода и не влияет на повышение износа его деталей. Следовательно, нагрузочная способность фрикционного сопряжения 7 - 14 может быть значительно ниже, чем сопряжения 7 - 13, это дает возможность изготовлять ведомый элемент 12 с меньшим диаметром и шириной дорожки качения (поверхности 14), что облегчает варианты конструктивного обеспечения механических характеристик привода, например, смещение диапазона частот вращения. Так как одна из контактирующи х поверхностей имеет сферическую поверхность, а другие - конические, вершины конусов качения направлены в одну (для каждого контакта) сторону, поперечное скольжение в местах контакта минимальное, чем обеспечивается высокий КПД привода. Проверка кинематических возможностей привода. Исходные данные: n = 1470об/мин - частота вращения ведущего элемента; R = 52,5мм радиус сферической поверхности ведущ. элемента; Xmax = Ymax = 92мм - наибольшие расчетные диаметры дорожек качения на ведущем элементе соответственно для ведомых элементов 11 и 12; Xmin = Ymi n = 30мм - наименьшие расчетные диаметры дорожек качения; D = 78мм - расчетный диаметр дорожки качения ведомого элемента 11; d = 71мм - то же ведомого элемента 12; Z1 = 26 - число зубьев вн утреннего (солнечного) колеса 17 планетарной передачи; Z2 = 90 - число зубьев центрального колеса 15. Формула передаточного отношения привода где W20 - частота вра щения выходного вала; W6 - частота вра щения ведуще го элемента. Все величины в формуле, кроме X, Y и W20 постоянные. С учетом этого при W6 = n = 1470об/мин (для сравнения - диапазон передаточных чисел для прототипа: Imin = -0,8; Imax = -8). Диапазон регулирования
ДивитисяДодаткова інформація
Автори англійськоюDiatel Mykola Mykytovych, Zakharchenko Valerii Ivanovych, Snisarenko Ivan Mykolaiovych, Syniahovskyi Ivan Ivanovych
Автори російськоюДятел Николай Никитович, Захарченко Валерий Иванович, Снисаренко Иван Николаевич, Синяговский Иван Иванович
МПК / Мітки
МПК: F16H 3/02
Мітки: ланцюгом, кінематичним, привод, замкнутим
Код посилання
<a href="https://ua.patents.su/5-25016-privod-z-zamknutim-kinematichnim-lancyugom.html" target="_blank" rel="follow" title="База патентів України">Привод з замкнутим кінематичним ланцюгом</a>
Привод каретки плосков’язальної машини
Номер патенту: 24899
Опубліковано: 06.10.1998
Автори: Хомяк Олег Миколайович, Піпа Борис Федорович, Яковлев Юрій Олександрович
МПК: D04B 15/96
Мітки: каретки, привод, машини, плосков`язальної
Формула / Реферат:
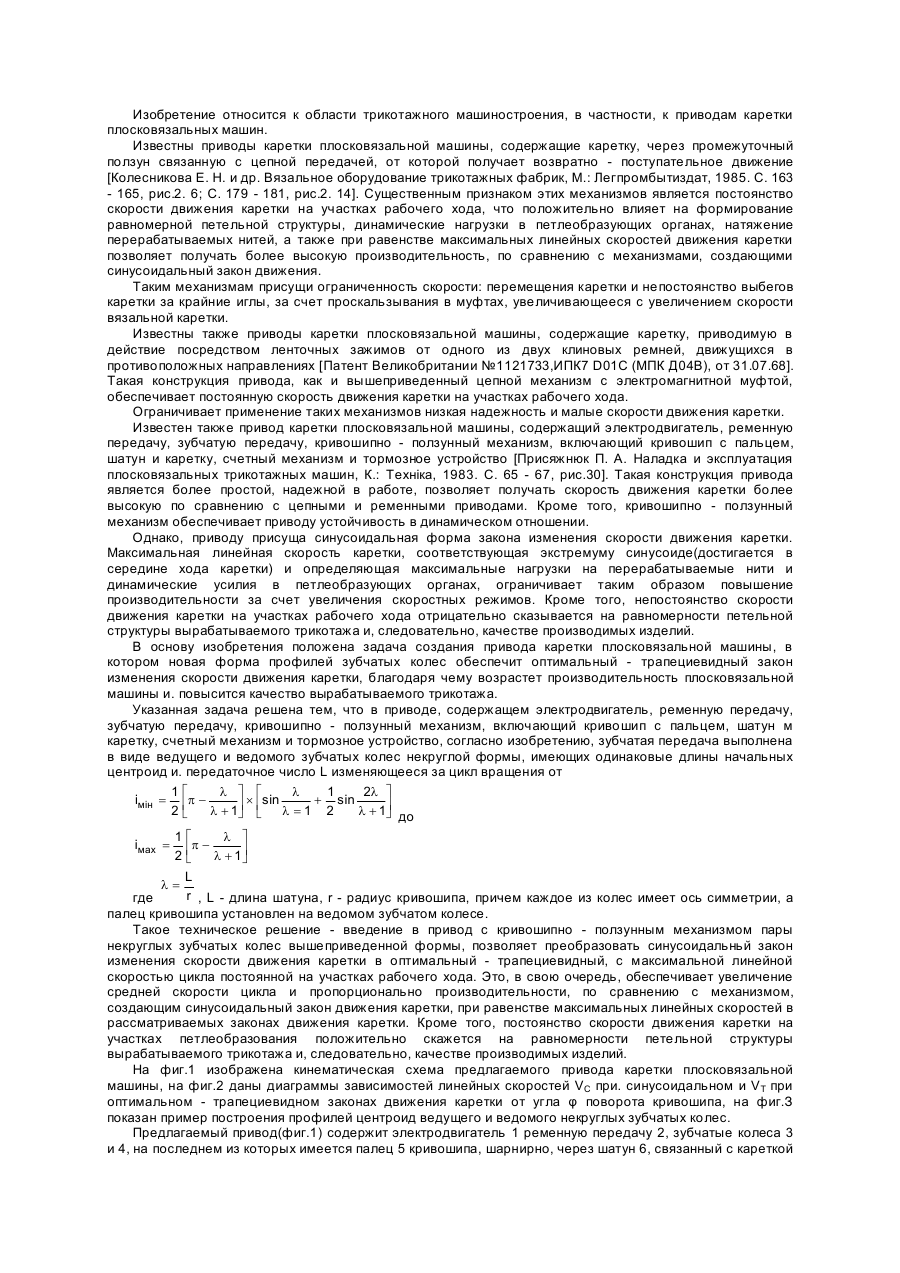
Привод каретки плосковязальной машины, содержащий электродвигатель, ременную передачу, зубчатую передачу, кривошипно-ползунный механизм, включающий кривошип с пальцем, шатун и каретку, счетный механизм и тормозное устройство, отличающийся тем, что зубчатая передача выполнена в виде ведущего и ведомого зубчатых колес некруглой формы, имеющих одинаковые длины начальных центроид и передаточное число i изменяющееся за цикл вращения от шатуна, r...
Привод валків каландру
Номер патенту: 13229
Опубліковано: 28.02.1997
Автори: Музиченко Олег Олександрович, Толочко Олександр Васильович, Кравченко Вілен Васильович, Позняк Григорій Іванович
Мітки: валків, привод, каландру
Формула / Реферат:
Привод валков каландра, содержащий электродвигатель, соединенный через муфту с редуктором, и кинематически связанное с редуктором устройство для передачи вращения на цапфы валков каландра, выполненное в виде шестерен, установленных на цапфах валков, и систему передаточных шестерен для передачи вращения от редуктора на цапфы валков, отличающийся тем, что передаточные шестерни и шестерни, установленные на цапфах валков, выполнены с косозубым...
Реверсивний привод
Номер патенту: 1995
Опубліковано: 20.12.1994
Автори: Картель Іван Іванович, Заблоцький Борис Михайлович, Морозов Юрій Анатолійович, Кучеренко Григорій Федорович
МПК: F16H 37/00, A01D 69/00
Мітки: реверсивний, привод
Формула / Реферат:
1. Реверсивный привод, содержащий установленные на одном валу зубчатую и фрикционную муфты, коробку передач, механизм переключения зубчатой муфты, копир и рычаг, имеющий ролики для взаимодействия с копиром и установленный на корпусе с возможностью воздействия на упорный подшипник нажимного диска фрикционной муфты при обкатке роликами копира, отличающийся тем, что, с целью повышения надежности работы и упрощения конструкции, копир жестко...
Привод транспортного засобу

Номер патенту: 3356
Опубліковано: 27.12.1994
Автор: Єгоров Володимир Олексійович
МПК: B62M 1/00
Мітки: привод, засобу, транспортного
Формула / Реферат:
Привод транспортного средства, содержащий шарнирный четырехзвенник, в котором коромысло соединено с рамой через кривошип и рычаг, установленный на опоре, причем кривошип имеет ведущую звездочку на ведущем валу, педаль установлена на коромысле, а длина коромысла равна 1,1-1,3 длины кривошипа, отличающийся тем, что четырехзвенник выполнен в виде шарнирного параллелограмма, в котором неподвижная опора расположена в любой точке окружности,...
Привод верстату
Номер патенту: 15654
Опубліковано: 30.06.1997
Автори: Бабенко Анатолій Михайлович, Бабенко Михайло Андрійович
МПК: B23Q 5/00
Формула / Реферат:
Привод станка, содержащего шпиндель, включающий первую и вторую ременные передачи, первый и второй электродвигатель, на выходных валах, которых установлены приводные шкивы соответствующих ременных передач, и первая муфта, отличающийся тем, что в привод введены вторая муфта и первый дополнительный вал, на котором расположены ведомые шкивы первой и второй ременной передачи и ведущий шкив дополнительно введенной второй ступени ременной передачи,...
Попередній патент: Скрубер вентурі
Наступний патент: Мікрохірургічний колюче-різальний інструмент
Випадковий патент: Спосіб одержання консервованого вітамінвмісткого продукту з моркви