Спосіб формування бажаних перехідних режимів
Номер патенту: 29614
Опубліковано: 25.01.2008
Автори: Воінов Володимир Павлович, Воінов Володимир Володимирович
Формула / Реферат
1. Спосіб формування бажаних перехідних режимів вихідної величини F(t), що включає регулювання за визначеною залежністю R(t) формуючої величини у технологічних процесах нагріву до заданої температури термічної електропечі опору (ТЕПО) з металовиробами великої теплоємності, а також розгін до заданої швидкості позиційного електроприводу постійного струму (ЕППС), який відрізняється тим, що для підвищення середнього значення вихідної величини Fc у перехідному процесі, бажана перехідна характеристика Fб(t) формується у вигляді:
![]() , (1)
, (1)
де Fзн - задане значення, що відповідає припустимим енерговитратам у відомих перехідних режимах; К - коефіцієнт форсування; tпп - тривалість перехідного процесу прототипу.
2. Спосіб за п. 1, який відрізняється тим, що для збільшення коефіцієнта форсування у виразі (1) без збільшення енергозатрат бажаний графік Re(t) для регулювання формуючої величини, якою у ТЕПО є потужність, що витрачається в нагрівачах, а у ЕППС цю роль відіграє динамічний крутний момент двигуна, визначається диференціюванням виразу (1):
![]() , (2)
, (2)
і, оскільки енергозатрати за час tпп визначаються інтегруванням за цей проміжок часу формуючої величини, а інтеграл від похідної функції завжди дорівнює цій функції, то при будь-якому форсуванні К енергозатрати визначаються виразом (1) і не можуть перевищити припустиме значення.
Текст
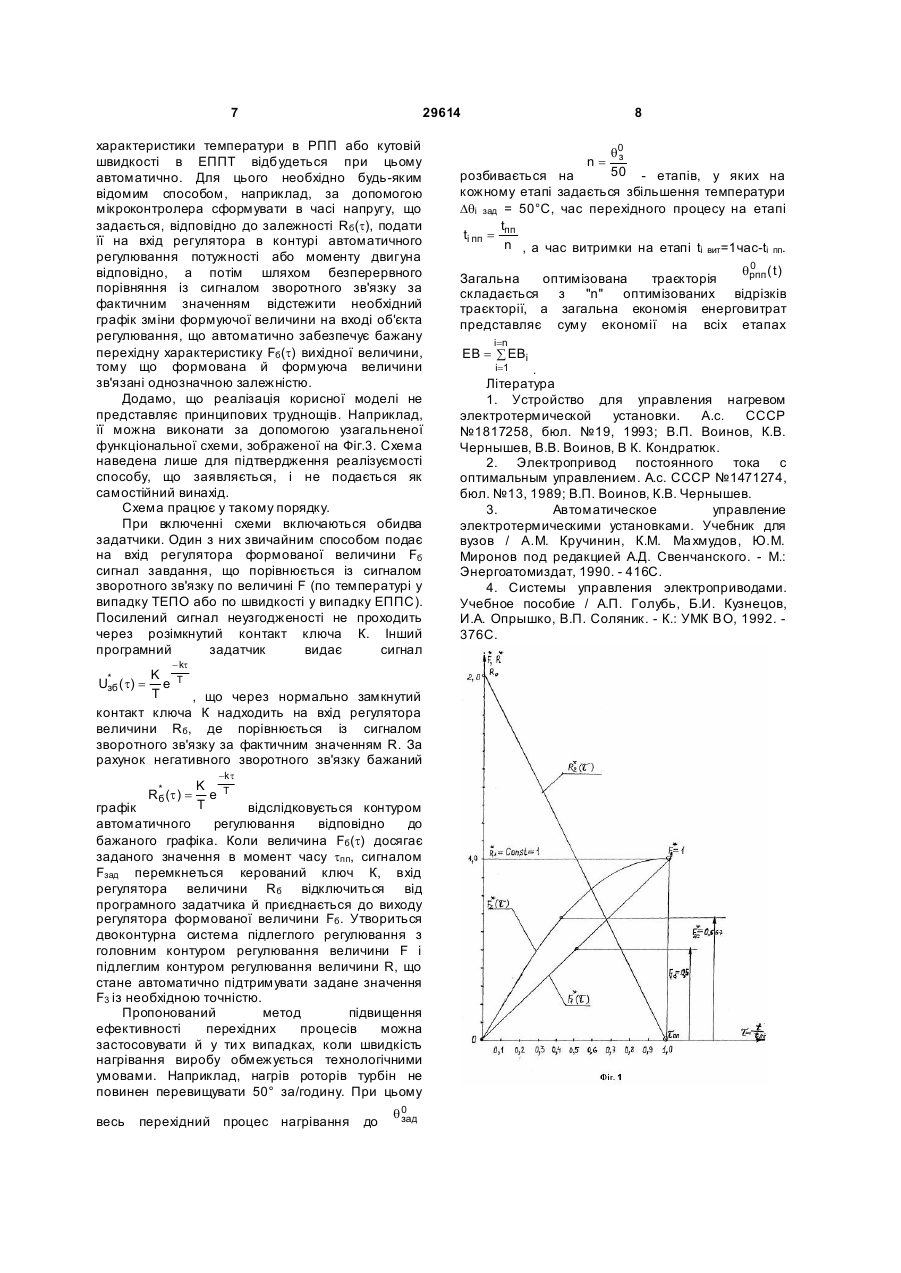
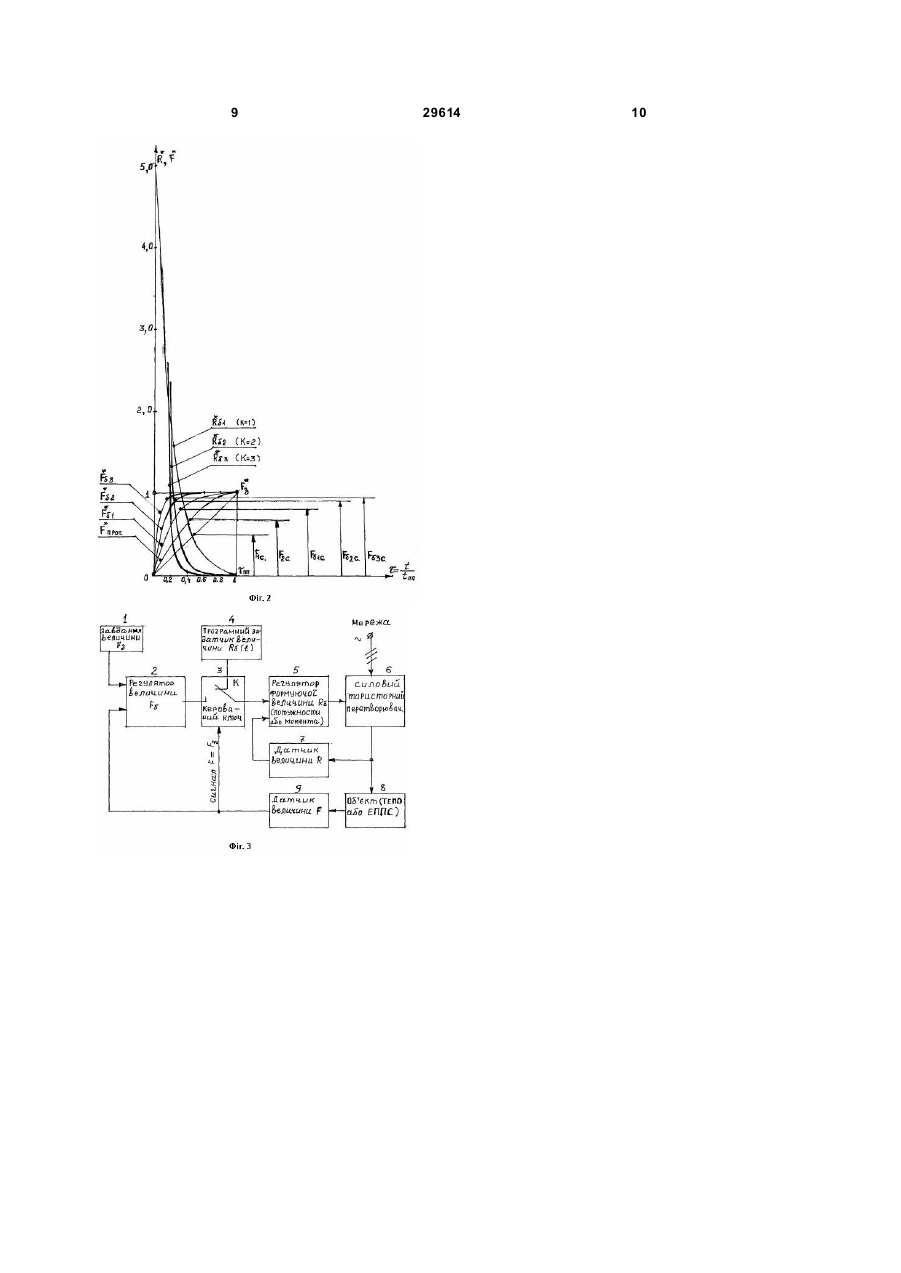
1. Спосіб формування бажаних перехідних режимів вихідної величини F(t), що включає регулювання за визначеною залежністю R(t) формуючої величини у те хнологічних процесах нагріву до заданої температури термічної електропечі опору (ТЕПО) з металовиробами великої теплоємності, а також розгін до заданої швидкості позиційного електроприводу постійного струму (ЕППС), який відрізняється тим, що для підвищення середнього значення вихідної величини Fc у перехідному процесі, бажана перехідна характеристика Fб (t) формується у вигляді: 2 3 29614 4 "Товстий" виріб з металу, що нагрівається формована величина також представляє інерційну ланку з постійною t * * * = * F1 (t ) ; часу нагріву Т и набагато перевищуючу= q1( t) w1(t ) Fз × Трпп. = t пп У процесі нагріву температура поверхні * * * 0 ; qрпп ( t ) формуюча величина R1( t) = P1 ( t) = M1( t) = 1 виробу практично повторює , a середнє значення вихідної величини в q0 (t ) перехідному процесі температура в центрі виробу ц істотно відстає від неї. Тому після закінчення часу tпп , коли в РПП буде досягнута задана технологами температура 9°, яку не можна перевищувати, починається режим витримки. При цьому системою q 0 = q0 з, а регулювання ТЕПО підтримується рпп прогрів внутрішнього об'єму виробу та ліквідація 0 Dq0 = q0 - qц (t ) з різниці здійснюється за рахунок теплопровідності виробу. У „товстих" виробах час витримки набагато перевищує час нагріву t пп і залежить від розміру F*c = 0,5Fз* . 1 * EB1 Енерговитрати за відносний час t tпп = =1 * t пп при R1 = 1 назвемо номінальними й будемо порівнювати з ними енерговитрати всіх перехідних режимів. Конкретні відносні значення енерговитрат при цьому складуть * * для ТЕПО EB1 = P1 × tпп = 1; для 1 q0 (t ) 2 tпп різниці Dq0 між и ц = 1 * . Тому, чим ви щою (t ) * = = = EB1 M (t ) × w* (t)dt ò виявиться температура центра виробу на початку 2 0 0 витримки, тим менше різниця Dq0 і на її подолання q0 з буде потрібно менше часу для витримки tвитр і менші енерговитрати на підтримку заданої температури в РПП. У свою чергу величина q 0 (t пп ) ц 0 пропорційна середньому значенню q с РПП за термін часу tпп. Аналогічно, в електроприводі, що призначений для відпрацьовування переміщення S, чим вище за час перехідного процесу виявиться середня кутова швидкість wс, тим більше переміщення Sпп=wcp ·tпп відпрацює електропривод на стадії перехідного процесу. У розглянутих прикладах підвищення ефективності перехідних режимів має місце при обов'язковій умові, що збільшення середнього значення вихідного параметра в цих режимах забезпечується без збільшення енерговитрат у порівнянні з відомими способами організації перехідних процесів. Спосіб формування бажаних режимів, що заявляється, застосовується, як мінімум, до двох розглянути х ви ще різних процесів. Тому перехідну характеристику параметра, що формується (температура або кутова швидкість) загально позначимо через F(t) незалежно від його фізичної природи, а залежність для регулювання формуючого параметру (у нашому випадку, потужності або динамічного моменту двигуна) позначимо загальним вираженням через R(t). Крім того, для узагальнення будемо використовувати не іменовані, а відносні величини. Дотепер найпоширенішим способом формування перехідних режимів є такий, при якому формуюча величина R(t) підтримується постійною, наприклад, номінальною на всьому протязі перехідного режиму. При цьому формована величина F(t) росте по прямій з позитивним кутовим коефіцієнтом і в момент часу tпп досягає заданого значення. Характеристики цього режиму на Фіг.1 позначені індексом "1" і у відносних величинах мають вигляд ЕППО 0,5 . Традиційний спосіб формування перехідних процесів при R*(t)=const був істотно поліпшений у винаходах: 1) "Устройство для управления нагревом электротермической установки", А.с. СССР №1817258, бюл. №19 от 23.05.1993; и 2) "Электропривод постоянного тока с оптимальным управлением", А.с. СССР, №1471274; бюл. №13 от 07.04.1989. Найбільш близьким з них є А.С. СССР №1817258, у яким пропонується спосіб формування перехідних режимів в ТЕПО регулюванням потужності, що витрачається в нагрівачах, за лінійним графіком. У перехідних процесах, сформованих за способом-прототипом вихідна формована величина являє собою опуклу параболу * * F2 (t ) = q* (t ) = w* ( t) = 2F2 зад ( t - 0,5t 2 ) 2 2 * F2c = з * 0,667Pзад , а формуюча величина змінюється по прямій з негативним кутовим коефіцієнтом, * * починаючи з R0 = 2Rн = 2 * R* (t ) = P2 ( t) = M* д (t ) = 2 2 2R* н (1- t) = 2(1- t) tпп . Середні енерговитрати за tпп при цьому способі не перевищують енерговитрат за традиційним способом при R*(t)=1. Максимальне підвищення ефективності за критерієм Fc у порівнянні із традиційним способом становить F2c 0,667 = = 133. , F1c 0,5 На Фіг.1 характеристики прототипу позначені цифрою 2. Недоліком прототипу є те, що лінійний графік R* (t ) 2 обмежує за умовою номінальних 5 29614 * енерговитрат початкове значення на рівні R0 < 2 , що не дозволяє використати зростаючі можливості по форсуванню сучасних електроприводів та іншого устаткування, у зв'язку із чим максимальне * збільшення вихідної величини F2c й ефективності штучно обмежено на рівні 33%. Спосіб, що заявляється вільний від недоліків прототипу. Він без збільшення середніх енерговитрат за час перехідного процесу tпп дозволяє набагато збільшувати е фективність процесу в порівнянні з відомими способами формування перехідних процесів. Спосіб, що заявляється, являє собою сукупність певних взаємозалежних науково-технічних заходів, які забезпечують його ефективність. 1. Підбирається така бажана перехідна * характеристика Fб ( t) , що, будучи реалізована, забезпечить потрібне підвищення ефективності перехідного процесу. Це може бути збільшення продуктивності або зниження енерговитрат при збереженні продуктивності. * 2. По складеній залежності Fб ( t) шляхом диференціювання визначається графік для регулювання формуючої величини * R б (t ) = * dFб ( t) dt * * У випадку ТЕПО Fб (t ) = q ( t) - температура на виході нагрівачів, а * R б (t ) = d q* ( t) dt - потужність, що витрачається в * * нагрівачах. У випадку ЕППС Fб (t ) = w (t ) - кутова dw(t ) R * (t ) = б dt швидкість двигуна, a динамічний момент двигуна. Ключовою перевагою й відмінністю способу формування перехідних режимів, що заявляється, є застосування в якості бажаних перехідних характеристик експоненти Fб (t ) = 1 - e -kt t t t t= T = пп tпп 5 - постійна часу експоненти; де відносний час; К=1; 2; 3 – коефіцієнт форсування. Особливість даної залежності в тому, що її чисельне значення не може перевищува ти одиниці, а в іменованих величинах - номінального значення. Оскільки при цьому d(1 - e R * (t ) = б dt -k t T ) = k e T -k t T то середні енерговитрати за визначаються постійним інтегралом час tпп 6 * t пп EB = ò 0 R * (t )d t б tпп d(1 - e =ò dt 0 -k t T ) dt -k t = (1 - e T ) t пп £1 0 Таким чином, зі збільшенням коефіцієнта К=1; 2; 3... ефективність росте, теоретично наближаючись до 100%, а енерговитрати не перевищують номінального значення, як і в традиційному перехідному процесі при R*(t)=const=1. Графіки бажаних перехідних процесів наведені на Фіг.2 для значень К=1; К=2; * * * К=3; відповідні Fб1( t) ; Fб2 ( t) и Fб3 ( t) наведені * повністю, a Fб ( t) наведена тільки для К=1 за браком місця. Для порівняння характеристики наведені разом з характеристиками прототипу й традиційними при R1(t)=const=1. Чисельні результати всіх розглянутих способів формування перехідних процесів зведені в табл.1. Як бачимо, при К=1 фактичне форсування дорівнює 5, при К=2-10. Уже зараз деякі типи високомоментних двигунів допускають таке форсування й тенденція така, що припустимі кратності за моментом будуть зростати. Що стосується ТЕПО, то там можливості форсування визначаються тільки потужністю мережі живлення. Перехідні характеристики: 1 - традиційного спосо 2 - спосіб прототип; 3 - спосіб, що заявляється, Традиційний процес при R1(t)=const=1 Спосіб прототип Заявлений спосіб К=1 Заявлений спосіб К=2 Заявлений спосіб К=3 3. Завершальним заходом способу, що заявляється, є реалізація перехідного Fб (t) режиму. Це зручно зробити, задавши бажаний закон у вигляді напруги, що задана, а потім відстежити його за допомогою замкнутої системи регулювання з негативним зворотним зв'язком. Але оскільки і температура у випадку ТЕПО, і кутова швидкість двигуна у випадку ЕППС є досить інерційними величинами, то використання цих параметрів у якості негативного зворотного зв'язку для безпосереднього відтворення перехідної характеристики Fб (t) не дає належного результату. Набагато ефективніше використати такий же прийом для відтворення формуючої величини відповідно до залежності Rб (t), оскільки зворотний зв'язок по потужності або по крутному моменту дви гуна є набагато більше швидкодіючим, а реалізація бажаної t F1 R1 F2 R2 Fб1 Rб2 Fб2 Rб2 Fб3 Rб3 0 0 1 0 2 0 5 0 10 0 15 0,2 0,2 1 0,36 1,6 0,632 1,839 0,864 1,353 0,95 0,747 0 0 0 0 0 0 0 7 29614 характеристики температури в РПП або кутовій швидкості в ЕППТ відбудеться при цьому автоматично. Для цього необхідно будь-яким відомим способом, наприклад, за допомогою мікроконтролера сформувати в часі напругу, що задається, відповідно до залежності Rб (t), подати її на вхід регулятора в контурі автоматичного регулювання потужності або моменту двигуна відповідно, а потім шляхом безперервного порівняння із сигналом зворотного зв'язку за фактичним значенням відстежити необхідний графік зміни формуючої величини на вході об'єкта регулювання, що автоматично забезпечує бажану перехідну характеристику Fб (t) вихідної величини, тому що формована й формуюча величини зв'язані однозначною залежністю. Додамо, що реалізація корисної моделі не представляє принципових труднощів. Наприклад, її можна виконати за допомогою узагальненої функціональної схеми, зображеної на Фіг.3. Схема наведена лише для підтвердження реалізуємості способу, що заявляється, і не подається як самостійний винахід. Схема працює у такому порядку. При включенні схеми включаються обидва задатчики. Один з них звичайним способом подає на вхід регулятора формованої величини Fб сигнал завдання, що порівнюється із сигналом зворотного зв'язку по величині F (по температурі у випадку ТЕПО або по швидкості у випадку ЕППС). Посилений сигнал неузгодженості не проходить через розімкнутий контакт ключа К. Інший програмний задатчик видає сигнал - kt K T e T , що через нормально замкнутий контакт ключа К надходить на вхід регулятора величини Rб , де порівнюється із сигналом зворотного зв'язку за фактичним значенням R. За рахунок негативного зворотного зв'язку бажаний U*= зб ( t) -k t K T e T графік відслідковується контуром автоматичного регулювання відповідно до бажаного графіка. Коли величина Fб (t) досягає заданого значення в момент часу tпп, сигналом Fзад перемкнеться керований ключ К, вхід регулятора величини Rб відключиться від програмного задатчика й приєднається до виходу регулятора формованої величини Fб . Утвориться двоконтурна система підлеглого регулювання з головним контуром регулювання величини F і підлеглим контуром регулювання величини R, що стане автоматично підтримувати задане значення F3 із необхідною точністю. Пропонований метод підвищення ефективності перехідних процесів можна застосовувати й у ти х випадках, коли швидкість нагрівання виробу обмежується технологічними умовами. Наприклад, нагрів роторів турбін не повинен перевищувати 50° за/годину. При цьому R * (t ) = б весь перехідний процес нагрівання до q0 зад 8 q0 з 50 - етапів, у яких на розбивається на кожному етапі задається збільшення температури Dqі зад = 50°С, час перехідного процесу на етапі t ti пп = пп n , а час витримки на етапі ti вит=1чac-ti пп. n= 0 qрпп ( t ) Загальна оптимізована траєкторія складається з "n" оптимізованих відрізків траєкторії, а загальна економія енерговитрат представляє суму економії на всіх етапах = n i EB= å EBi = 1 i . Література 1. Устройство для управления нагревом электротермической установки. А.с. СССР №1817258, бюл. №19, 1993; В.П. Воинов, К.В. Чернышев, В.В. Воинов, В К. Кондратюк. 2. Электропривод постоянного тока с оптимальным управлением. А.с. СССР №1471274, бюл. №13, 1989; В.П. Воинов, К.В. Чернышев. 3. Автоматическое управление электротермическими установками. Учебник для вузов / А.М. Кручинин, К.М. Ма хмудов, Ю.М. Миронов под редакцией А.Д. Свенчанского. - М.: Энергоатомиздат, 1990. - 416С. 4. Системы управления электроприводами. Учебное пособие / А.П. Голубь, Б.И. Кузнецов, И.А. Опрышко, В.П. Соляник. - К.: УМК ВО, 1992. 376С. 9 29614 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for forming required transient state
Автори англійськоюVoinov Volodymyr Volodymyrovych, Voinov Volodymyr Pavlovych
Назва патенту російськоюСпособ формирования желаемых переходных режимов
Автори російськоюВоинов Владимир Владимирович, Воинов Владимир Павлович
МПК / Мітки
Мітки: формування, перехідних, спосіб, бажаних, режимів
Код посилання
<a href="https://ua.patents.su/5-29614-sposib-formuvannya-bazhanikh-perekhidnikh-rezhimiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування бажаних перехідних режимів</a>
Спосіб формування перехідних режимів технологічного процесу безперервного лиття
Номер патенту: 24390
Опубліковано: 17.07.1998
Автори: Кипенський Андрій Володимирович, Базакуца Вікторія Вікторовна, Сокол Євген Іванович
МПК: B22D 11/16
Мітки: перехідних, режимів, спосіб, технологічного, безперервного, формування, лиття, процесу
Формула / Реферат:
Способ формирования переходных режимов технологического процесса непрерывного литья, включающий подачу в кристаллизатор жидкого металла через питатели литниковой чаши с начальной угловой скоростью вращениягде d - коэффициент, характеризующий отклонение струи расплава;Rн - наружный радиус заготовки (радиус кристаллизатора);Rв - внутренний радиус заготовки (радиус дорна);g - ускорение свободного...
Спосіб формування перехідних режимів при виробництві заготовок на машині безперервного лиття
Номер патенту: 24389
Опубліковано: 17.07.1998
Автори: Базакуца Вікторія Вікторовна, Кипенський Андрій Володимирович, Сокол Євген Іванович
МПК: B22D 11/16
Мітки: спосіб, машини, заготовок, лиття, виробництві, формування, режимів, перехідних, безперервного
Формула / Реферат:
1. Способ формирования переходных режимов при производстве заготовок на машине непрерывного литья, при котором в кристаллизатор вводят затравку, осуществляют частичное заполнение кристаллизатора расплавом, после чего начинают циклическое вытягивание заготовки, отличающийся тем, что скорость литья в переходном режиме изменяют в соответствии с выражениемгде Kт - технологический коэффициент переходного режима;t - текущее...
Спосіб отримання бі-інтеркалятів диселенідів перехідних металів
Номер патенту: 40676
Опубліковано: 15.08.2001
Автори: Аксельруд Лев Григорович, Куліков Леонід Мінейович, Ромака Любов Петрівна, Семенов-Кобзар Андрій Олександрович
МПК: C01G 33/00, C01G 41/00, C01B 19/00
Мітки: спосіб, диселенідів, металів, отримання, перехідних, бі-інтеркалятів
Формула / Реферат:
Спосіб отримання бі-інтеркалятів диселенідів перехідних металів, що включає інтеркалювання з газової фази шляхом термообробки в реакторі, який відрізняється тим, що інтеркалювання киснем диселенідів ніобію, вольфраму, які інтеркальовані міддю, здійснюють з газової фази при температурі 470 - 570 К та загальному тиску кисню 0,101 - 0,103 МПа протягом 1 - 4 годин.
Спосіб визначення динамічних характеристик пружних механічних систем за даними перехідних процесів
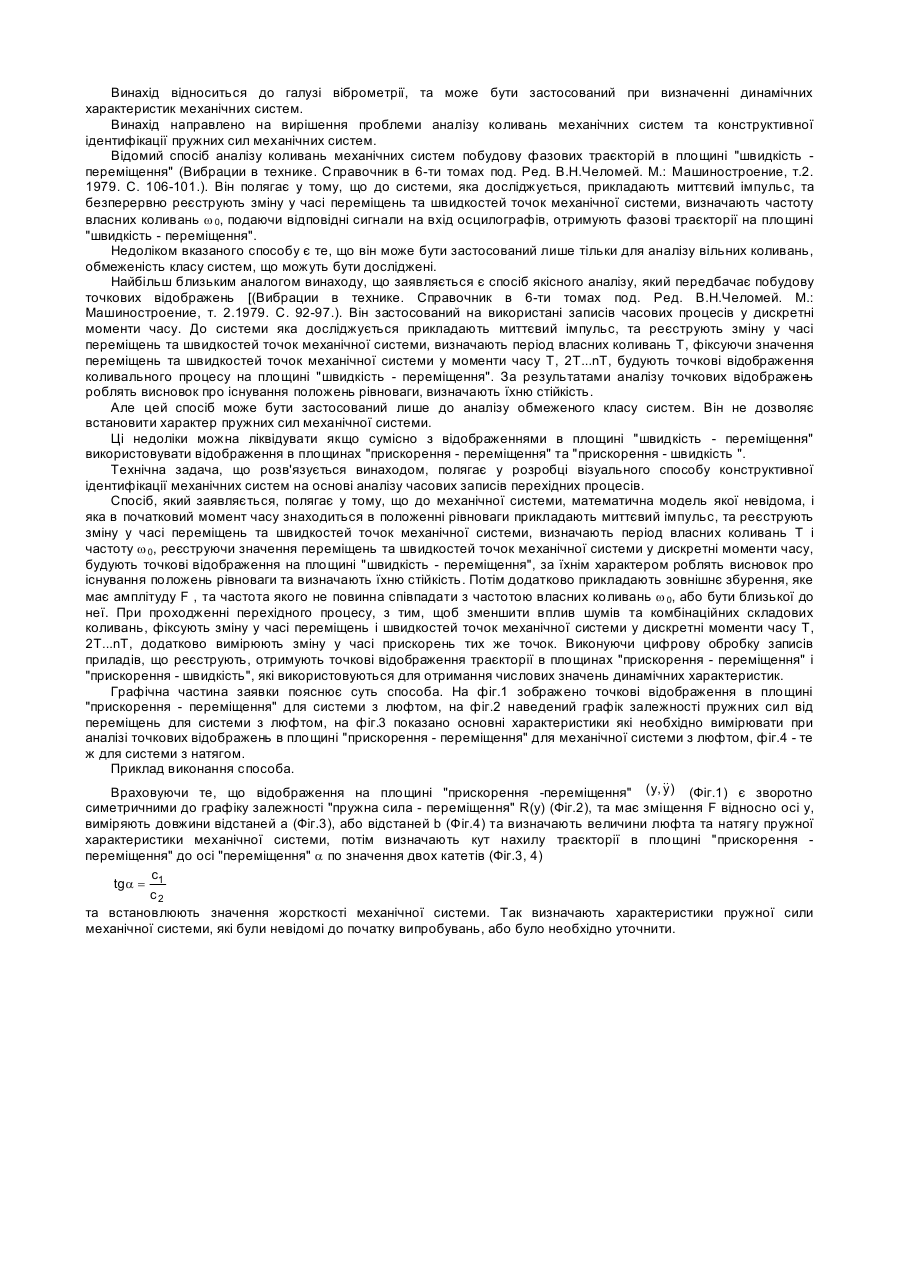
Номер патенту: 70561
Опубліковано: 15.10.2004
Автор: Волкова Вікторія Євгенівна
МПК: G01H 1/00, G01P 15/16, G01P 15/18, G01P 15/00
Мітки: механічних, спосіб, перехідних, систем, динамічних, процесів, визначення, пружних, характеристик, даними
Формула / Реферат:
Спосіб визначення динамічних характеристик пружних механічних систем за даними перехідних процесів, при якому до механічної системи, математична модель якої невідома і яка в початковий момент часу знаходиться в положенні рівноваги, прикладають миттєвий імпульс та реєструють зміну у часі переміщень та швидкостей точок механічної системи, визначають період власних коливань Т і частоту
Спосіб нанесення покриттів на основі сполук перехідних металів у вакуумі на металеві поверхні
Номер патенту: 40387
Опубліковано: 15.03.2004
Автори: Дабіжа Євген Вікторович, Золотухін Олександр Віталійович, Бондар Іван Васильович, Новіков Микола Васильович, Борисова Ніна Миколаївна
МПК: C23C 14/02, C23C 14/32
Мітки: сполук, металеві, нанесення, основі, поверхні, металів, перехідних, покриттів, спосіб, вакуумі
Формула / Реферат:
Спосіб нанесення покриттів на основі сполук перехідних металів у вакуумі на металеві поверхні, що включає попередню очистку поверхні підкладки активним тліючим розрядом, кінцеву очистку шляхом конденсації на неї металу з іонним бомбардуванням, формування потоку металевої плазми за допомогою вакуумно-дугового розряду у розрідженій атмосфері реакційного газу, розташування виробу у плазмовому потоці і конденсацію потоку плазми, який...
Попередній патент: Спосіб диференційної діагностики новоутворень щитовидної залози
Наступний патент: Фільтруючий елемент фільтра очистки газоподібних і рідких продуктів
Випадковий патент: Засоби для лікування порушень із залученням модуляції рецепторів ріанодину