Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки
Номер патенту: 30577
Опубліковано: 25.02.2008
Автори: Біляєв Сергій Миколайович, Александров Євген Євгенович, Плюшко Іван Миколайович, Гусєв Петро Миколайович, Кононенко Володимир Олександрович, Подригало Михайло Абович, Соловйов Олег Віталійович
Формула / Реферат
Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки, що містить педаль гальм, яка механічно зв'язана з головним гальмівним циліндром, гідравлічно з'єднаним з гальмовим приводом, електронний блок керування, вихід якого електрично з'єднаний з керуючою обмоткою електромагніта, причому якір електромагніта механічно зв'язаний із золотником регулятора гальмівних сил, яка відрізняється тим, що, до системи додатково введені датчики кутових швидкостей і датчики лінійних прискорювань корпуса літака відносно його головних центральних осей інерції, причому виходи цих датчиків електрично зв'язані зі входами електронного блока.
Текст
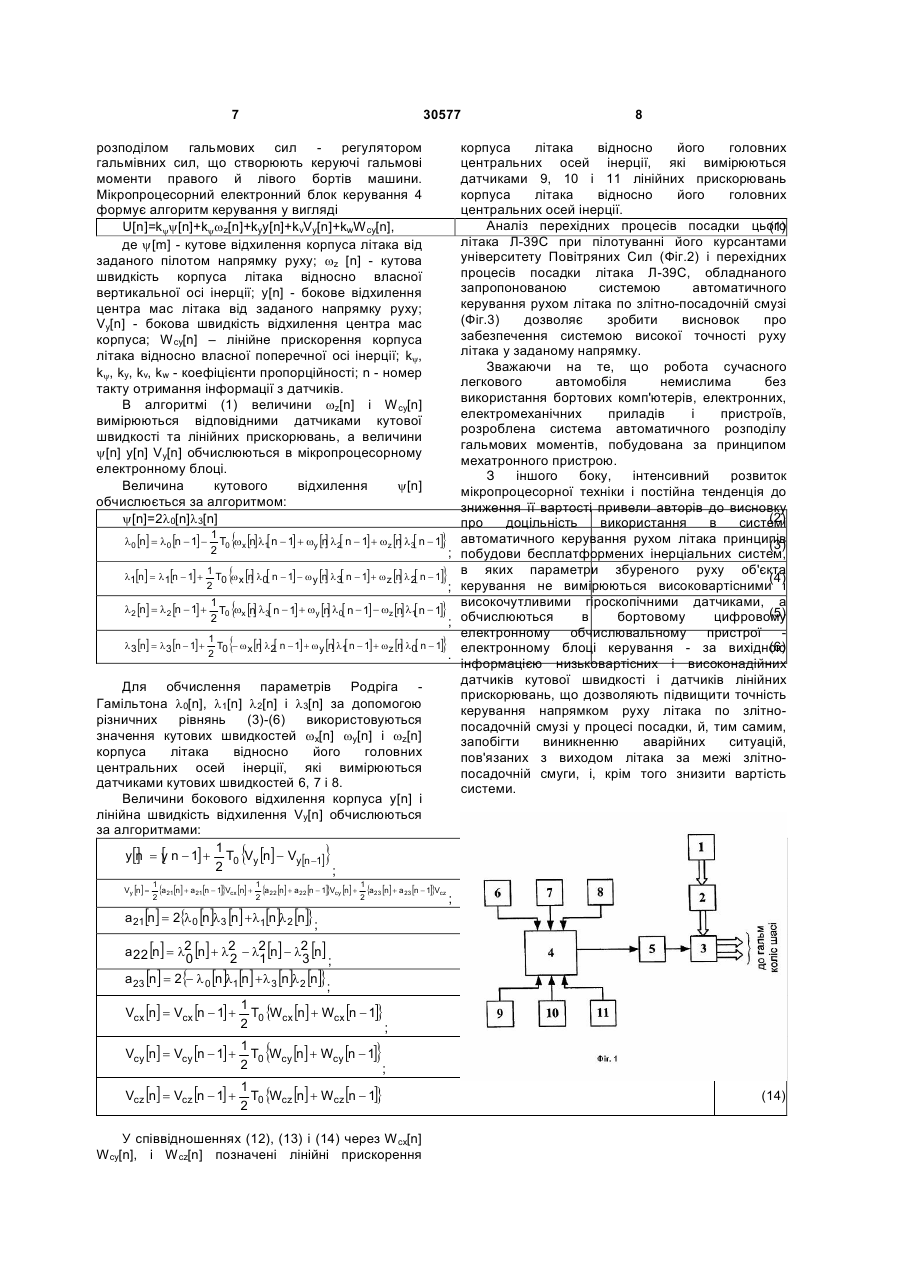
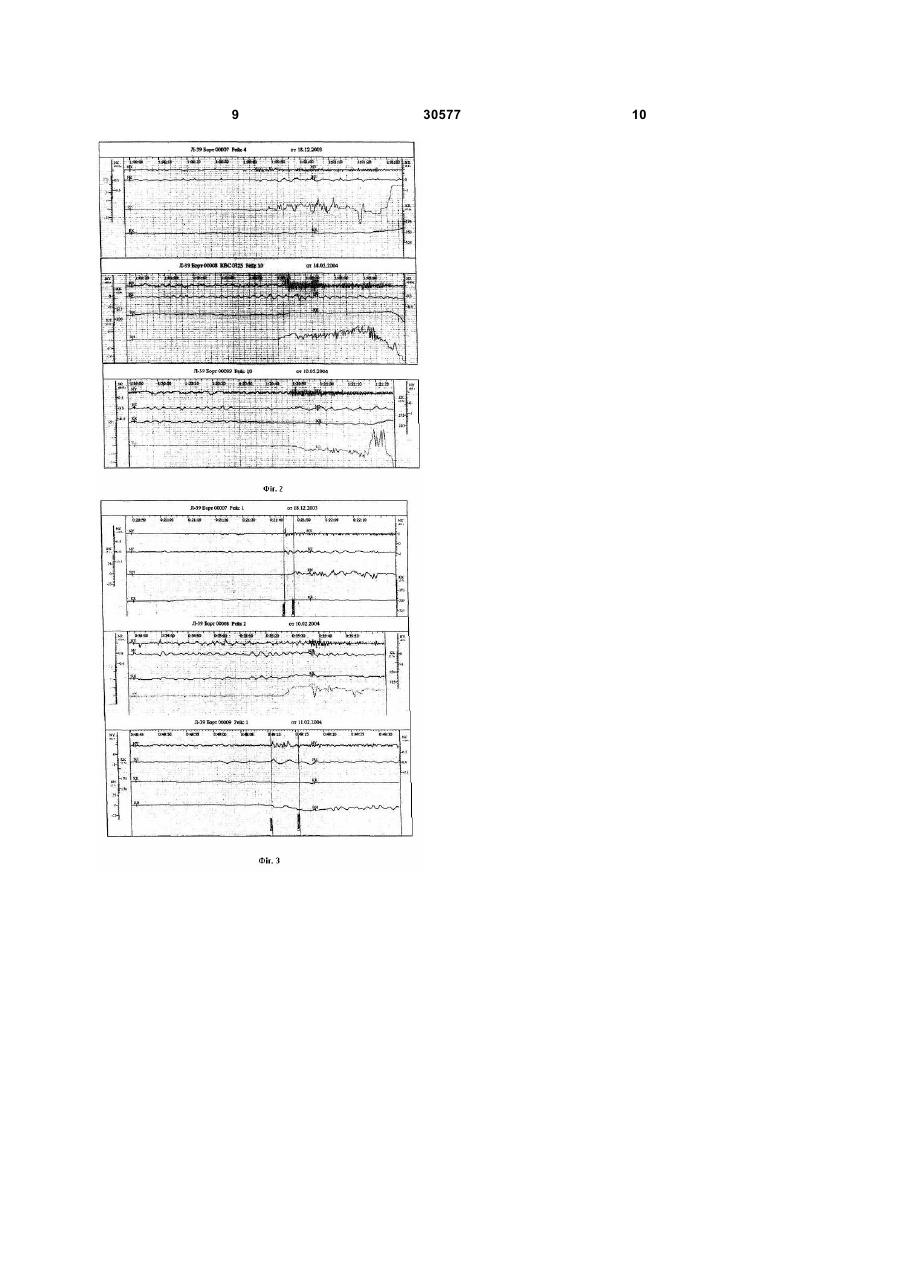
Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі 3 цієї схеми не порушується при коливаннях напруги живлення в досить широких межах, тому що електромагніти розраховуються на мінімальну напругу. Проте відома електродистанційна гідравлічна система з дистанційним керуванням, в процесі посадки, при контакті коліс шасі зі злітнопосадочною смугою здійснюється блокування штурвала літака із золотником регулятора гальмівних сил, а керування рухом літака по злітно-посадочній смузі здійснюється пілотом за допомогою штурвала. При цьому точність керування напрямком руху літака по злітнопосадочній смузі залежить перш за все від майстерності пілота. Системі при роботі на юзовому режимі властиві коливання гальмового тиску й моменту щодо встановленого середнього значення. Такі системи мають цілком певний відсоток втрат, що в остаточному підсумку приводить до деякого збільшення гальмового шляху літака. Відома електрогідравлічна система з дистанційним керуванням і електричним антиюзовым автоматом [И.И. Зверев, С.С. Коконин Проектирование авиационных колес и тормозных систем. - М. -«Машиностроение», 1973. - С.143-146], що складається із задатчика тиску (регулятора гальмовних сил), електроблока, електрогідравлічного клапана, клапана розгальмовування і датчика - генератора системи антиюзової автоматики. Задатчик тиску установлюється в кабіні пілота. Він являє собою трансформатор зі змінним коефіцієнтом трансформації (залежно від ходу гальмової педалі) і додатковим електровимикачем. Електроблок складається із трьох елементів: електричного пристрою лінії датчика прямого і зворотного зв'язку, магнітного підсилювача і електронного автомата системи антиюзової автоматики. Електрогідравлічний редукційний клапан розміщається в безпосередній близькості від гальм - у відсіку шасі. Електрогідравлічний клапан складається з електромеханічного перетворювача, пристрою типу «сопло-заслінка», що керує робочим золотником, електроклапана, що замикає гідравлічне живлення, щоб виключити витрати рідини через сопла і гальма, при ненатиснутій гальмовій педалі, а також датчика зворотного зв'язку, що встановлений на лінії скороченого тиску. Клапан розгальмовування встановлюється у відсіку шасі й призначений для скидання тиску з гальм при роботі системи антиюзової автоматики. Датчик системи антиюзової автоматики встановлюється на гальмі колеса і являє собою генератор постійного або змінного струму, що видає напругу, пропорційну числу обертів колеса. Відома система по своєму принципу дії не призначена для підтримки режиму гальмування в зоні граничного коефіцієнта зчеплення. Система відноситься до систем релейного типу з виконавчим клапаном, що працює за принципом «відкрите - закрите», і при роботі на юзовом режимі їй властиві коливання гальмових тиску й моменту. Система має певний відсоток втрат, що в остаточному підсумку приводить до збільшення 30577 4 гальмового шляху літак и зменшує точність керування. Також відома система керування гальмуванням літака [И.И. Зверев, С.С. Коконин Проектирование авиационных колес и тормозных систем. - М. - «Машиностроение», - 1973. - С.146150], що містить обчислювальний блок, посилювальний блок, лічильно-вирішальний пристрій системи, який сприймає сигнал від тензодатчика по гальмовому моменту і сигнал по проковзуванню, для одержання якого встановлене на тім же візку, де встановлені й основні гальмові колеса спеціальне негальмове колесо; електрогідравлічний клапан, датчик кутової швидкості, гальмо. Для одержання необхідних сигналів по кутовій швидкості на гальмовому колесі встановлюється один датчик, а на негальмовому - другий датчик. Відома система по своєму принципу дії уступає по ефективності системам, що підтримують режим гальмування в зоні граничного коефіцієнта зчеплення. Проте система не забезпечує достатнього зниження нерівномірності гальмових моментів на колесах однієї осі, що зменшує точність керування, крім того система потребує встановлення додатково спеціального негальмового колеса на тім же візку, де встановлені й основні гальмові колеса, що ускладнює конструкцію. Найбільш близькою за технічною сутністю та результатом, що досягається, щодо запропонованої корисної моделі, є система автоматичного зниження нерівномірності гальмових моментів [Повышение устойчивости колесных машин в тормозных режимах: Монография / Е.Е. Александров, В.П. Волков и др.; Под ред. Д.О. Волонцевича. - Харьков: НТУ «ХПИ», 2007 - С.33-39], яка включає тормозний пристрій, що містить дискові гальмові механізми, кожний з яких містить гальмовий диск, поворотну навколо шарніра скобу з робочими гальмовими циліндрами; датчиком величини гальмового моменту (тензодатчик), сигнал з якого надходить в електронний блок керування; електрогідравлічний гальмовий привід, пристрій для стабілізації розподілу гальмових моментів, (регулятор гальмових сил), а також датчики кутової швидкості коліс і датчик контролю тиску в гальмовому приводі, з'єднані з електронним блоком керування. Система автоматичного зниження (керування) нерівномірності гальмових моментів працює по заданому алгоритму таким чином. При зміні гальмового моменту на лівому або правому дискових гальмових механізмах, обумовленому або зміною коефіцієнта тертя, або зміною середнього радіуса, змінюється момент сил тертя щодо осі шарніра, рівновага скоби порушується. Скоба повертається навколо шарніра, при цьому з'являється сигнал у тензодатчику, що надходить на електронний блок керування. Зміна гальмового моменту викликає зміну кутової швидкості обертання гальмового диска і, як наслідок, зміну сигналу в датчику кутової швидкості коліс. Сигнал з датчиків обробляється електронним блоком керування, що, на підставі порівняння сигналів від 5 датчиків лівого й правого колеса оцінює нерівномірність гальмових моментів, кутову швидкість кожного колеса й видає керуючий сигнал на гальмовий пристрій, в якому шток двигуна, з'єднаний з додатковою гальмовою колодкою, починає переміщатися до притиснення гальмової колодки до гальмового диску, створюючи додатковий гальмовий момент. При вирівнюванні гальмових моментів електронний блок керування, відключає гальмовий пристрій. Алгоритм роботи електронної системи автоматичного зниження нерівномірності гальмових моментів на колесах передньої осі побудований автором за принципом різноманітного циклу. Система автоматичного керування нерівномірності гальмових моментів, що вибрана за прототип, дозволяє здійснювати оцінку нерівномірності гальмових моментів та кутової швидкості кожного колеса електронним блоком керування на підставі порівняння сигналів від датчиків лівого й правого колес, а також дозволяє зменшити бортову нерівномірність транспортного засобу за рахунок введення пристрою для стабілізації розподілу гальмових моментів між колесами однієї вісі. Проте в системі як датчики використовуються тензодатчики, гіроскопічні датчики кута відхилення корпуса від заданого напрямку руху і кутової швидкості обертання колеса відносно власної вертикальної осі інерції. Відомо, що гіроскопічний датчик куту відхилення дає значні похибки в умовах вібрацій, які досягають значних величин у процесі посадки, що зменшує точність. В основу корисної моделі, що заявляється, поставлена задача удосконалення системи автоматичного керування рухом літака по злітнопосадочній смузі в процесі посадки шляхом введення додаткових конструктивних елементів датчиків та нового виконання відомих, що дозволяє підвищити точність керування напрямком руху літака по злітно-посадочній смузі у процесі посадки, й, тим самим, запобігти виникненню аварійних ситуацій, пов'язаних з виходом літака за межі злітно-посадочної смуги, і, крім того знизити вартість системи за рахунок використання низьковартісних і високонадійних датчиків кутової швидкості і датчиків лінійних прискорювань. Поставлена задача досягається тим, що в систему автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки, що містить педаль гальм, яка механічно пов'язана з головним гальмовим циліндром, який гідравлічно поєднаний з гальмовим приводом регулятором гальмових сил, електронний блок керування, вихід якого електрично з'єднаний з керуючою обмоткою електромагніта, причому якір електромагніта механічно пов'язаний із золотником регулятора гальмових сил, відповідно до корисної моделі, до системи додатково введені датчики кутових швидкостей і датчики лінійних прискорювань корпуса літака відносно його головних центральних осей інерції, причому виходи цих 30577 6 датчиків електрично пов'язані зі входами електронного блока. Корисна модель, що заявляється, дозволяє підвищити точність керування напрямком руху літака по злітно-посадочній смузі у процесі посадки, й, тим самим, запобігти виникненню аварійних ситуацій, пов'язаних з виходом літака за межі злітно-посадочної смуги, і, крім того знизити вартість системи за рахунок використання низьковартісних і високонадійних датчиків кутової швидкості і датчиків лінійних прискорювань. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак та технічним результатом, що досягається, полягає в наступному. Введення датчиків кутових швидкостей і датчики лінійних прискорювань корпуса літака відносно його головних центральних осей інерції, виходи яких електрично пов'язані зі входами електронного блока, дозволяє підвищити точність керування напрямком руху літака по злітнопосадочній смузі у процесі посадки. На Фіг.1 наведена загальна блок-схема системи автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки. На Фіг.2 наведені перехідні процеси посадки літака Л-39С при пілотуванні його курсантами університету Повітряних Сил. На Фіг.3 наведені перехідні процеси посадки літака Л-39С, обладнаного системою автоматичного керування рухом літака по злітнопосадочній смузі. Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки містить педаль гальм 1, механічно пов'язану з головним гальмовим циліндром 2, який гідравлічно поєднаний з регулятором гальмових сил 3; електронний блок 4, вихід якого електрично з'єднаний з керуючою обмоткою електромагніта 5, причому якір електромагніта 5 механічно пов'язаний із золотником регулятора гальмових сил 3; датчики кутових швидкостей 6, 7, 8 і датчики 9, 10, 11 лінійних прискорювань корпуса літака відносно його головних центральних осей інерції, причому виходи цих датчиків електрично пов'язані зі входами електронного блока керування 4. Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки працює наступним чином. Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки в процесі гальмування за інформацією, отриманою від трьох датчиків кутової швидкості 6, 7, 8, встановлених на колесах правого й лівого бортів машини, та від трьох датчиків 9, 10, 11 лінійних прискорювань корпуса літака відносно його головних центральних осей інерції, встановлених по осям ортонормованих приладових базисів, і положенню педалі гальма 1 виробити керуючий сигнал, що забезпечує стабілізацію курсового кута й компенсацію бічного відведення. Керуючий сигнал, обчислений електронним блоком керування у дискретні моменти часу, після його перетворення в шматочнопостійну функцію й посилення надходить на вхід виконавчих органів 7 30577 розподілом гальмових сил - регулятором гальмівних сил, що створюють керуючі гальмові моменти правого й лівого бортів машини. Мікропроцесорний електронний блок керування 4 формує алгоритм керування у вигляді U[n]=kyy[n]+kywz[n]+kyy[n]+kvVy[n]+kwWcy[n], де y[m] - кутове відхилення корпуса літака від заданого пілотом напрямку руху; wz [n] - кутова швидкість корпуса літака відносно власної вертикальної осі інерції; у[n] - бокове відхилення центра мас літака від заданого напрямку руху; Vy[n] - бокова швидкість відхилення центра мас корпуса; W cy[n] – лінійне прискорення корпуса літака відносно власної поперечної осі інерції; ky, ky, ky, kv, kw - коефіцієнти пропорційності; n - номер такту отримання інформації з датчиків. В алгоритмі (1) величини wz[n] і Wcy[n] вимірюються відповідними датчиками кутової швидкості та лінійних прискорювань, а величини y[n] у[n] Vy[n] обчислюються в мікропроцесорному електронному блоці. Величина кутового відхилення y[n] обчислюється за алгоритмом: y[n]=2l0[n]l3[n] { } { } { } { l 0 [n] = l 0 [n - 1] } 1 T0 w x [n] l1 n - 1] + wy [] l 2 n - 1] + w z [n l 3[ n - 1] [ n [ ] 2 1 l1[n] = l1[n - 1] + T0 wx [n l0 n - 1] - wy [n l3 n - 1] + wz [n l 2 n - 1] ] [ ] [ ] [ 2 1 l 2 [n] = l 2 [n - 1] + T0 wx [n l 3[ n - 1] + w y [n l 0[ n - 1] - wz [n l1 n - 1] ] ] ] [ 2 1 ] [ ] [ ] [ l 3 [n] = l 3 [n - 1] + T0 - w x [n l 2 n - 1] + w y [n l1 n - 1] + wz [n l0 n - 1] 2 ; ; ; . Для обчислення параметрів Родріга Гамільтона l0[n], l1[n] l2[n] і l3[n] за допомогою різничних рівнянь (3)-(6) використовуються значення кутових швидкостей wx[n] wу[n] і wz[n] корпуса літака відносно його головних центральних осей інерції, які вимірюються датчиками кутових швидкостей 6, 7 і 8. Величини бокового відхилення корпуса у[n] і лінійна швидкість відхилення Vy[n] обчислюються за алгоритмами: 1 y[] = y n - 1] + T0 Vy [n] - Vy[n -1] n [ 2 ; { Vy [n] = } 1 {a21[n] + a21[n - 1]}Vcx [n] + 1 {a22 [n] + a22 [n - 1]}Vcy [n] + 1 {a23 [n] + a23 [n - 1]}Vcz 2 2 2 ; a21[n] = 2{l 0 [n]l 3 [n] +l1[n]l 2 [n]} (7) (8) (10) a23 [n] = 2{- l 0 [n]l1[n] +l 3 [n]l 2 [n]} ; 1 Vcx [n] = Vcx [n - 1] + T0 {Wcx [n] + Wcx [n - 1]} 2 ; { корпуса літака відносно його головних центральних осей інерції, які вимірюються датчиками 9, 10 і 11 лінійних прискорювань корпуса літака відносно його головних центральних осей інерції. Аналіз перехідних процесів посадки цього (1) літака Л-39С при пілотуванні його курсантами університету Повітряних Сил (Фіг.2) і перехідних процесів посадки літака Л-39С, обладнаного запропонованою системою автоматичного керування рухом літака по злітно-посадочній смузі (Фіг.3) дозволяє зробити висновок про забезпечення системою високої точності руху літака у заданому напрямку. Зважаючи на те, що робота сучасного легкового автомобіля немислима без використання бортових комп'ютерів, електронних, електромеханічних приладів і пристроїв, розроблена система автоматичного розподілу гальмових моментів, побудована за принципом мехатронного пристрою. З іншого боку, інтенсивний розвиток мікропроцесорної техніки і постійна тенденція до зниження її вартості привели авторів до висновку (2) про доцільність використання в системі автоматичного керування рухом літака принципів (3) побудови бесплатформених інерціальних систем, в яких параметри збуреного руху об'єкта (4) керування не вимірюються високовартісними і високочутливими гіроскопічними датчиками, а (5) обчислюються в бортовому цифровому електронному обчислювальному пристрої (6) електронному блоці керування - за вихідною інформацією низьковартісних і високонадійних датчиків кутової швидкості і датчиків лінійних прискорювань, що дозволяють підвищити точність керування напрямком руху літака по злітнопосадочній смузі у процесі посадки, й, тим самим, запобігти виникненню аварійних ситуацій, пов'язаних з виходом літака за межі злітнопосадочній смуги, і, крім того знизити вартість системи. (9) ; a22 [n] = l2 [n] + l2 - l2 [n] - l2 [n] 3 ; 2 1 0 } 1 T0 Wcy [n] + Wcy [n - 1] 2 ; 1 Vcz [n] = Vcz [n - 1] + T0 {Wcz [n] + Wcz [n - 1]} 2 Vcy [n] = Vcy [n - 1] + 8 У співвідношеннях (12), (13) і (14) через Wcx[n] Wcy[n], і Wcz[n] позначені лінійні прискорення (11) (12) (13) (14) 9 30577 10
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automatic control of motion of aircraft according on runway during landing
Автори англійськоюAleksandrov Yevhen Yevhenovych, Biliaiev Serhii Mykolaiovych, Husiev Petro Mykolaiovych, Kononenko Volodymyr Oleksandrovych, Pliushko Ivan Mykolaiovych, Podryhalo Mykhailo Abovych, Soloviov Oleh Vitaliiovych
Назва патенту російськоюСистема автоматического управления движением самолета по взлетно-посадочной полосе в процессе посадки
Автори російськоюАлександров Евгений Евгеньевич, Биляев Сергей Николаевич, Гусев Петр Николаевич, Кононенко Владимир Александрович, Плюшко Иван Николаевич, Подрыгало Михаил Абович, Соловьев Олег Витальевич
МПК / Мітки
МПК: B60T 8/58
Мітки: автоматичного, рухом, посадки, смузі, керування, процесі, злітно-посадочній, система, літака
Код посилання
<a href="https://ua.patents.su/5-30577-sistema-avtomatichnogo-keruvannya-rukhom-litaka-po-zlitno-posadochnijj-smuzi-v-procesi-posadki.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування рухом літака по злітно-посадочній смузі в процесі посадки</a>
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G08G 1/00, G06G 7/78, E01C 9/00
Мітки: спосіб, транспортних, дорожня, засобів, автоматичного, керування, розмітка, рухом
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Система автоматичного керування рухом судна за курсом
Номер патенту: 54147
Опубліковано: 17.02.2003
Автор: Бугрім Леонід Іванович
МПК: B63B 45/00, B63B 49/00, B63H 25/00
Мітки: курсом, судна, рухом, автоматичного, система, керування
Формула / Реферат:
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного...
Спосіб виконання зльоту літака з ушкодженої злітно-посадочної смуги
Номер патенту: 10190
Опубліковано: 15.11.2005
Автори: Хейленко Костянтин Юрійович, Дмитрієв Олег Петрович, Комаров Володимир Сергійович, Зайківський Олександр Болеславович, Яйчук Микола Семенович, Комаров Володимир Олександрович, Расстригін Олександр Олексійович
МПК: B64F 1/00
Мітки: зльоту, ушкодженої, літака, спосіб, виконання, смуги, злітно-посадочної
Формула / Реферат:
Спосіб виконання зльоту літака з ушкодженої злітно-посадочної смуги, при якому вибирають найбільш придатну для зльоту літака неушкоджену ділянку на ушкодженій злітно-посадочній смузі, установлюють трамплін на максимально можливій відстані від початку неушкодженої ділянки злітно-посадочної смуги, укладають елементи легкознімного металевого покриття на неушкодженій ділянці злітно-посадочної смуги по напрямку зльоту літака у бік трампліна,...
Спосіб посадки літака за допомогою колісного шасі та пристрій для його здійснення
Номер патенту: 67924
Опубліковано: 15.07.2004
Автори: Лінник Євген Васильович, Сергєєва Ксенія Олександрівна
МПК: B64C 25/00
Мітки: пристрій, колісного, спосіб, посадки, шасі, здійснення, допомогою, літака
Формула / Реферат:
1. Спосіб посадки літака за допомогою колісного шасі, який містить його гальмування під час пробігу, який відрізняється тим, що перед приземленням колеса розкручують до лінійної швидкості в точці дотику, рівної за величиною і протилежної за напрямком горизонтальній складовій посадкової швидкості літака в момент дотику.2. Спосіб за п. 1, який відрізняється тим, що колеса розкручують за допомогою, наприклад, зустрічного потоку...
Система керування рухом суден
Номер патенту: 5127
Опубліковано: 15.02.2005
Автори: Вільський Геннадій Борисович, Гончаров Євген Іванович, Мальцев Анатолій Сідорович, Бездольний Віктор Володимирович, Романов Георгій Семенович
МПК: B63B 43/00, G08G 7/00
Мітки: рухом, керування, суден, система
Формула / Реферат:
1. Система керування рухом суден, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центра, та пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратно-програмний комплекс, забезпечений адаптером, електронно-обчислювальними...
Попередній патент: Мульда для отримання чавуну
Наступний патент: Гальмова система транспортного засобу
Випадковий патент: Плівкове покривало для теплиць