Система керування рухом суден
Номер патенту: 5127
Опубліковано: 15.02.2005
Автори: Мальцев Анатолій Сідорович, Романов Георгій Семенович, Вільський Геннадій Борисович, Гончаров Євген Іванович, Бездольний Віктор Володимирович
Формула / Реферат
1. Система керування рухом суден, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центра, та пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратно-програмний комплекс, забезпечений адаптером, електронно-обчислювальними машинами і сервером, підключеним до серверу координаційного центра, яка відрізняється тим, що координаційний центр керування судноплавством забезпечений приймальною станцією автоматичної інформаційної системи, яка містить електронно-обчислювальну машину, що має змогу зв'язку з автоматичною інформаційною системою суден, які рухаються, і підключена до серверу координаційного центра, та пристроєм оцінки небезпеки зіткнення суден, що містить електронно-обчислювальну машину, підключену до серверу координаційного центра.
2. Система керування рухом суден за п. 1, яка відрізняється тим, що радіолокаційні станції суміжних постів регулювання руху суден мають зони радіолокаційного спостереження, які перекриваються до 20-30 %.
Текст
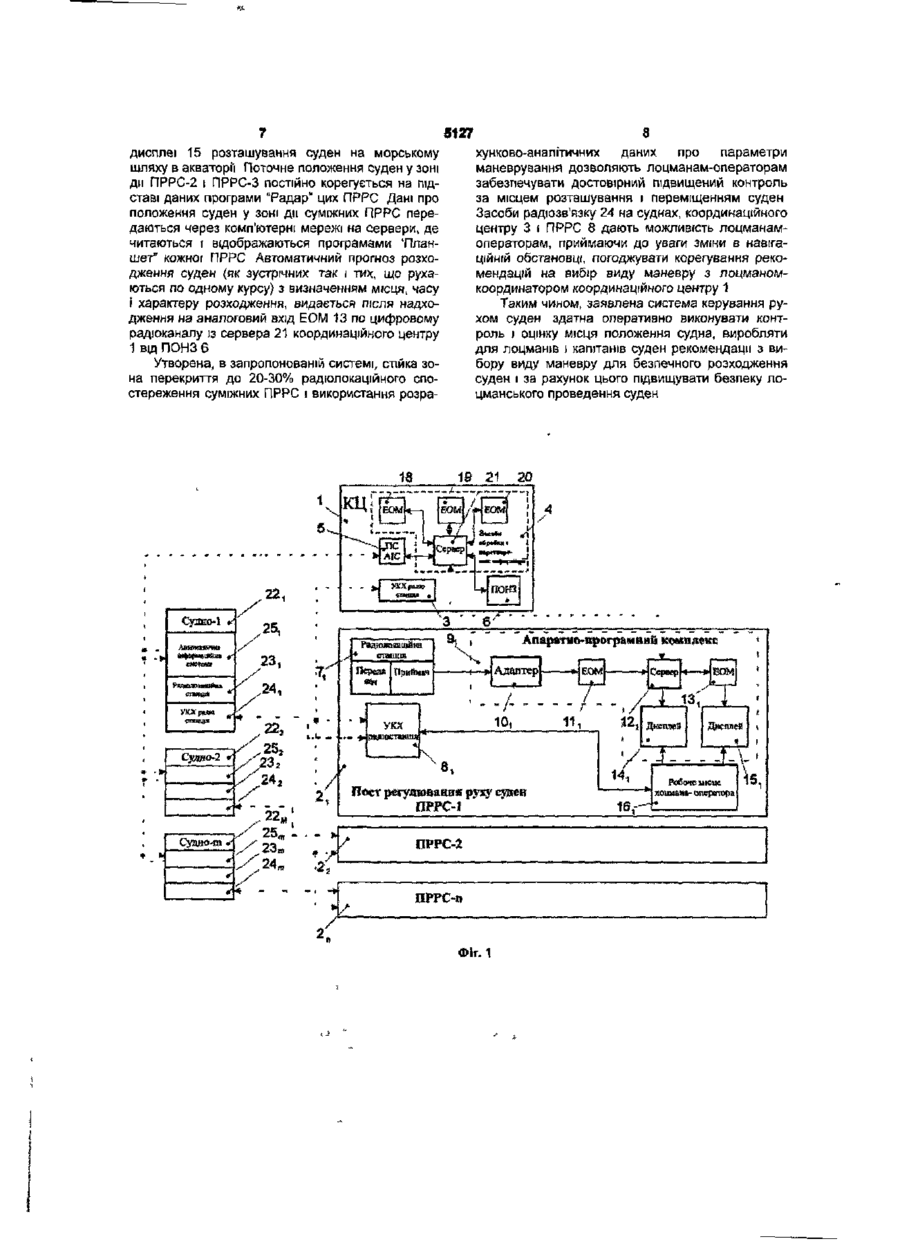
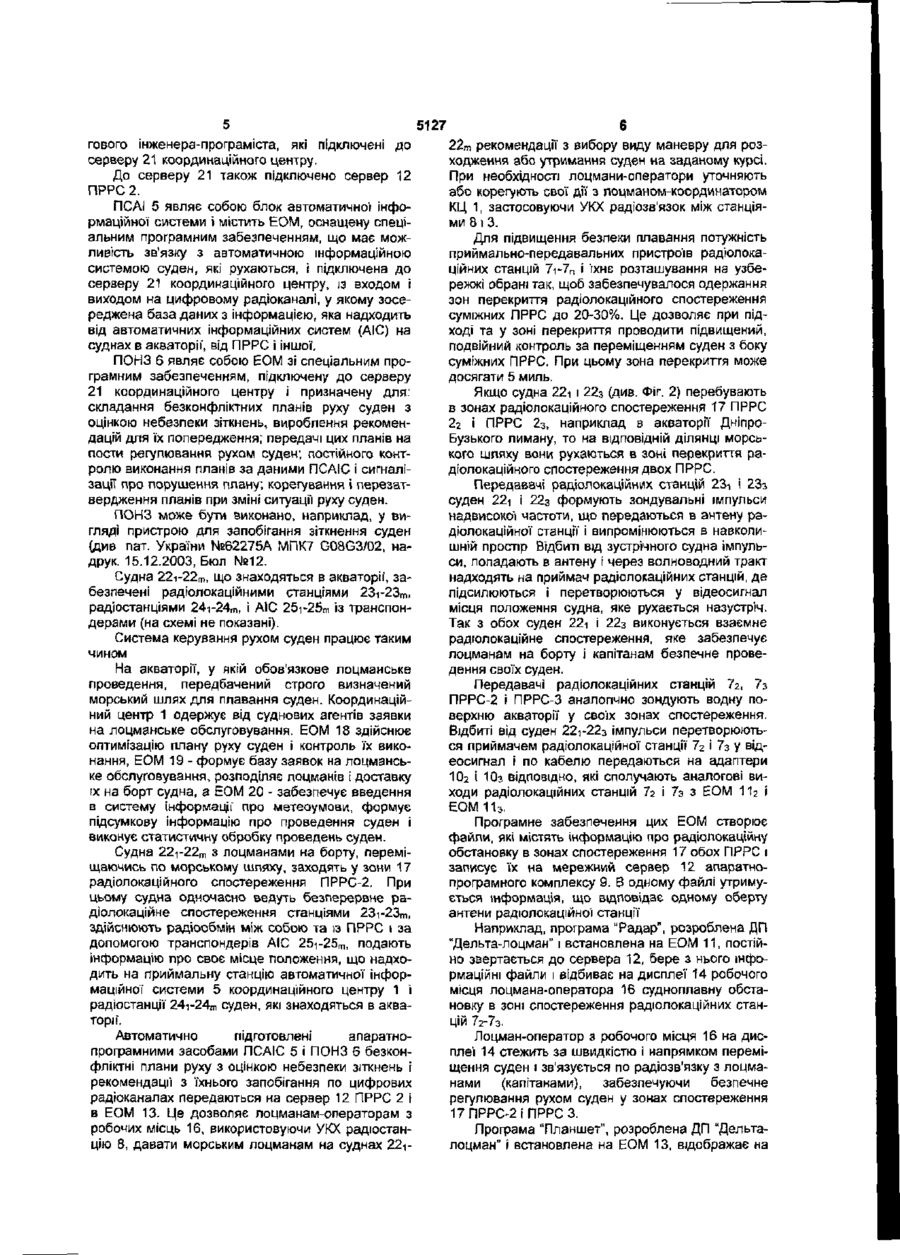
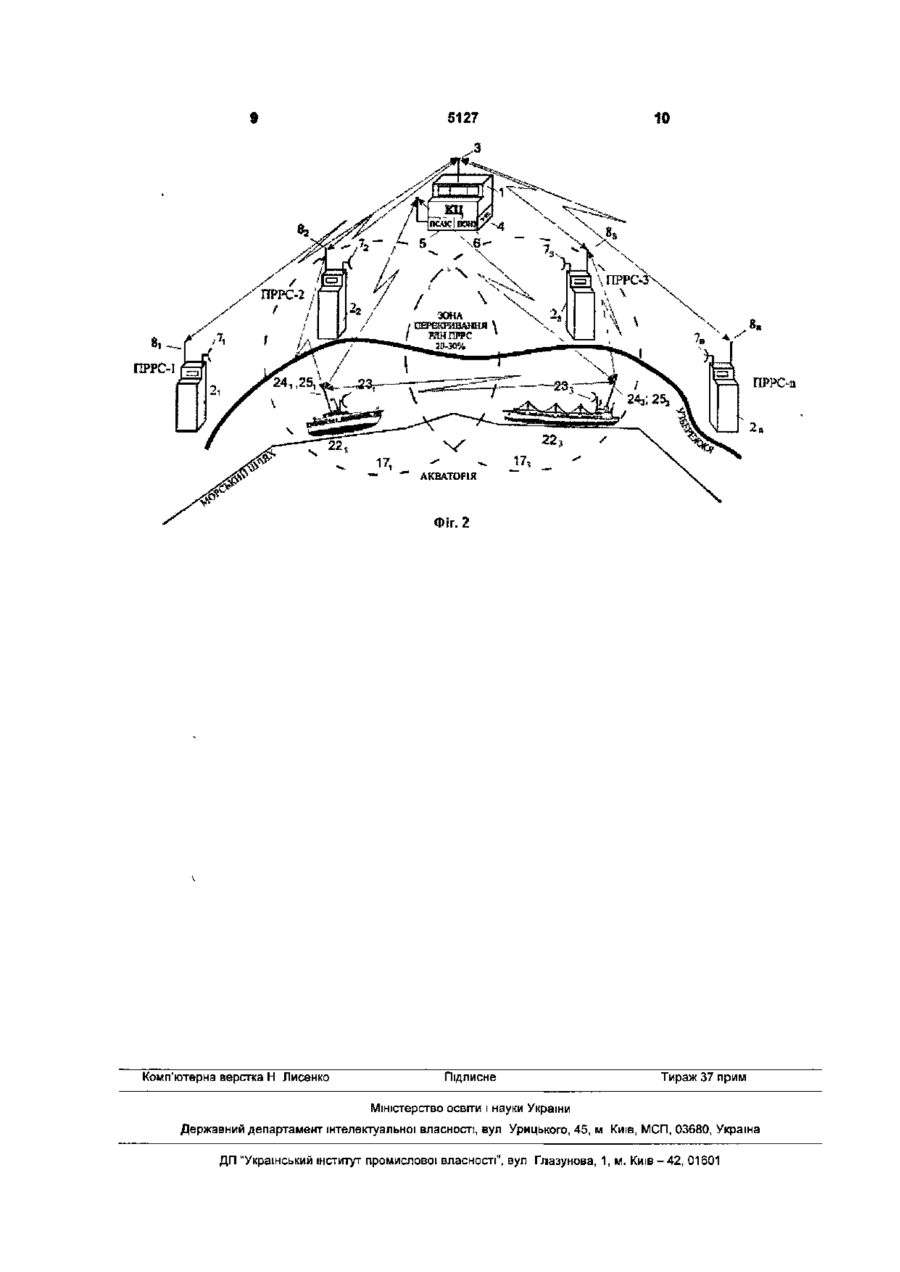
1. Система керування рухом суден, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центра, та пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратнопрограмний комплекс, забезпечений адаптером, електронно-обчислювальними машинами і сервером, підключеним до серверу координаційного центра, яка відрізняється тим, що координаційний центр керування судноплавством забезпечений приймальною станцією автоматичної' інформаційної системи, яка містить електроннообчислювальну машину, що має змогу зв'язку з автоматичною інформаційною системою суден, які рухаються, і підключена до серверу координаційного центра, та пристроєм оцінки небезпеки зіткнення суден, що містить електроннообчислювальну машину, підключену до серверу координаційного центра. 2. Система керування рухом суден за п.1, яка відрізняється тим, що радіолокаційні станції суміжних постів регулювання руху суден мають зони радіолокаційного спостереження, які перекриваються до 20-30%. Корисна модель відноситься до судоводіння, конкретніше до систем керування рухом суден в акваторіях з лоцманським проведенням, тобто біля берегів, у вузькостях і на акваторії портів. Відома система керування рухом суден в акваторіях з лоцманським проведенням, що містить центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення Інформації, які мають електроннообчислювальні машини, та пости регулювання рухом суден, забезпечені засобами радіолокації та радіозв'язку постів між собою і з суднами (див. А.С. Баскин, Г И Москвин. Береговые системы управления движением судов. - М.: Транспорт, 1986, с.63-70). Ознаками, які збігаються з істотними ознаками системи, що заявляється, є наступні: - координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які ма ють електронно-обчислювальні машини; - пости регулювання рухом суден, на яких установлені радіолокаційні станції і засоби радіозв'язку. Причини, що перешкоджають одержанню необхідного технічного результату такі Технічні засоби координаційного центру керування судноплавством не передбачають можливість оперативного контролю, оцінки місця положення суден і видачі рекомендацій лоцманам і капітанам суден по вибору виду маневру для безпечного розходження суден. Найближчим аналогом технічного рішення, що заявляється, є система керування рухом суден в акваторіях з лоцманським проведенням, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центру, та CM 5127 пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратно-програмний комплекс, забезпечений адаптером, електронно-обчислювальними машинами і сервером, підключеним до серверу координаційного центру (див. "Дельта-лоцман": П'ять років на фарватері. Златогор. Київ 2003, с.70-80, 91). Ознаками, які збігаються з істотними ознаками системи, що заявляється, такі: - координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центру, - пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратно-програмний комплекс, що забезпечений адаптером, електроннообчислювальними машинами і сервером, підключеним до серверу координаційного центру. Причини, що перешкоджають одержанню необхідного технічного результату такі. Технічними засобами координаційного центру керування судноплавством не передбачена можливість оперативного контролю й оцінки місця положення судна, а також видачі лоцманам і капітанам суден рекомендацій з вибору виду маневру для безпечного розходження суден. В основу корисної моделі поставлена задача удосконалити систему керування рухом суден в акваторіях з лоцманським проведенням шляхом введення в координаційний центр керування судноплавством нових пристроїв, які дозволять оперативно робити контроль і оцінку місця положення судна, давати рекомендації з вибору виду маневру для безпечного розходження суден і за рахунок цього підвищити безпеку плавання при лоцманському проведенні суден. Поставлена задача досягається тим, що в системі керування рухом суден в акваторіях з лоцманським проведенням, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центру, і пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратнопрограмний комплекс, забезпечений адаптером, електронно-обчислювальними машинами \ сервером, підключеним до серверу координаційного центру, відповідно до корисної моделі, що заявляється, координаційний центр керування судноплавством забезпечений приймальною станцією автоматичної інформаційної системи, яка містить електронно-обчислювальну машину, що мас змогу зв'язку з автоматичною інформаційною системою суден, які рухаються, і підключена до серверу координаційного центру, та пристроєм оцінки небезпеки зіткнення суден, що включає електроннообчислювальну машину, підключену до серверу координаційного центру. Радіолокаційні станції суміжних постів регулювання рухом суден мають зони радіолокаційного спостереження, які перекриваються до 20-30%. Розкриваючи причинно-наслідковий зв'язок між істотними ознаками системи, що заявляється, і технічним результатом необхідно відзначили наступне. Забезпечення координаційного центру керування судноплавством приймальною станцією автоматичної інформаційної' системи, яка має електронно-обчислювальну машину, що має змогу зв'язку з автоматичною Інформаційною системою суден, які рухаються, і підключена до серверу координаційного центру, та пристроєм оцінки небезпеки зіткнення суден, що містить електроннообчислювальну машину, підключену до серверу координаційного центру, дозволяє оперативно робити контроль і оцінку місця положення судна і давати рекомендації для безпечного розходження суден. Ознака "радіолокаційні станції суміжних постів регулювання рухом суден мають зони радіолокаційного спостереження, що перекриваються до 2030%", дозволяє забезпечити достовірний підвищений контроль за місцем положення і переміщенням суден Таким чином, відмінні ознаки системи в сполученні з відомими істотними ознаками дозволяють оперативно робити контроль і оцінку місця положення судна, давати пропозиції судну на вибір виду маневру для безпечного розходження і попередження надмірного зближення суден і за рахунок цього підвищити безпеку лоцманського проведення суден. На Фіг.1 приведена структурна схема системи керування рухом суден, на Фіг 2 - схема можливого розташування елементів системи керування рухом суден на узбережжі. Система керування рухом суден містить розташовані на узбережжі координаційний центр керування судноплавством (КЦ) 1 у визначеній акваторії і пости регулювання рухом суден (ПРРС) 2і-2 п . КЦ 1 забезпечений засобами радіозв'язку УКВ радіостанція 3, засобами обробки і перетворення інформації 4, приймальною станцією автоматичної інформаційної системи (ПСАІС) 5, котра виконує обробку даних про судна, що рухаються, і пристроєм оцінки небезпеки зіткнення суден (ПОНЗ) 6, що контролює їхній рух і виробляє рекомендації з вибору виду маневру для безпечного розходження. Кожен ПРРС має радіолокаційну станцію 7 і радіозв'язок - УКХ радіостанцію 8, а також забезпечений апаратно-програмним комплексом 9, наприклад комплексом "Дельта-навігатор", розробленим ДП "Дельта-лоцман" Комплекс 9 має адаптер 10, електронно-обчислювальну машину (ЕОМ)-11, сервер 12, електронно-обчислювальну машину (ЕОМ)-ІЗ, дисплеї 14 і 15, установлені на робочому місці лоцмана-оператора 16. Радіолокаційні станції 7 суміжних ПРРС мають зони радіолокаційного спостереження 17, що перекриваються до 20-30% (Фіг.2). Засоби обробки і перетворення інформації 4, координаційного центру 1, містять електроннообчислювальні машини: ЕОМ-18 лоцманакоординатора, ЕОМ-19 диспетчера, ЕОМ-20 чер 8127 8 хунково-аналітичних даних про параметри дисплеї 15 розташування суден на морському маневрування дозволяють лоцманам-операторам шляху в акваторії Поточне положення суден у зоні забезпечувати достовірний підвищений контроль дії ПРРС-2 і ПРРС-3 постійно корегується на підза місцем розташування і переміщенням суден ставі даних програми "Радар" цих ПРРС Дані про Засоби радіозв'язку 24 на суднах, координаційного положення суден у зоні дії суміжних ПРРС перецентру 3 і ПРРС 8 дають можливість лоцманамдаються через комп'ютерні мережі на сервери, де операторам, приймаючи до уваги зміни в навігачитаються і відображаються програмами 'Планційній обстановці, погоджувати корегування рекошет" кожної ПРРС Автоматичний прогноз розхомендацій на вибір виду маневру з лоцманомдження суден {як зустрічних так і тих, що рухакоординатором координаційного центру 1 ються по одному курсу) з визначенням місця, часу І характеру розходження, видається після надхоТаким чином, заявлена система керування рудження на аналоговий вхід ЕОМ 13 по цифровому хом суден здатна оперативно виконувати контрадюканалу із сервера 21 координаційного центру роль і оцінку місця положення судна, виробляти 1 від ПОНЗ 6 для лоцманів і капітанів суден рекомендації з виУтворена, в запропонованій системі, стійка зобору виду маневру для безпечного розходження на перекриття до 20-30% радіолокаційного спосуден і за рахунок цього підвищувати безпеку лостереження суміжних ПРРС і використання розрацманського проведення суден 1S Судно-1 18 21 ,25, Апаратио-прогр&мниЁ комплекс ,23, Адаптер ,24, " і" •і* - - .22, Суто-2 ¥ d .25, 4 8, 14, Пест рбгулю&ааня р у ^ суден ПРРС-І ,23 24 #•* /г± ЕОМ УКХ г • Судно-m Сервер ЕОМ Ъ ПРРС-2 ПРРС-й Фіг. 1 Робоче мкис лешмий- шісргпора 15, 5127 гового інженера-програміста, які підключені до серверу 21 координаційного центру. До серверу 21 також підключено сервер 12 ПРРС 2. ПСАІ 5 являє собою блок автоматичної інформаційної системи і містить ЕОМ, оснащену спеціальним програмним забезпеченням, що має можливість зв'язку з автоматичною інформаційною системою суден, які рухаються, і підключена до серверу 21 координаційного центру, із входом і виходом на цифровому радіоканалі, у якому зосереджена база даних з інформацією, яка надходить від автоматичних інформаційних систем (АІС) на суднах в акваторії, від ПРРС і іншої. ПОНЗ 6 являє собою ЕОМ зі спеціальним програмним забезпеченням, підключену до серверу 21 координаційного центру і призначену для: складання безконфліктних планів руху суден з оцінкою небезпеки зіткнень, вироблення рекомендацій для їх попередження; передачі цих планів на пости регулювання рухом суден; постійного контролю виконання планів за даними ПСАІС і сигналізації про порушення плану, корегування і перезатвердження планів при зміні ситуації руху суден. ПОНЗ може бути виконано, наприклад, у вигляді пристрою для запобігання зіткнення суден (див пат. України №62275А МПК7 G08G3/02, надрук. 15.12.2003, Бюл №12. Судна 22і-22 т , що знаходяться в акваторії1, забезпечені радіолокаційними станціями 23і-23 т , радіостанціями 24і-24 т , і АІС 25і-25 т із транспондерами (на схемі не показані). Система керування рухом суден працює таким чином На акваторії, у якій обов'язкове лоцманське проведення, передбачений строго визначений морський шлях для плавання суден. Координаційний центр 1 одержує від суднових агентів заявки на лоцманське обслуговування. ЕОМ 18 здійснює оптимізацію плану руху суден І контроль їх виконання, ЕОМ 19 - формує базу заявок на лоцманське обслуговування, розподіляє лоцманів і доставку їх на борт судна, а ЕОМ 20 - забезпечує введення в систему інформації' про метеоумови, формує підсумкову інформацію про проведення суден і виконує статистичну обробку проведень суден. Судна 2 2 г 2 2 т з лоцманами на борту, переміщаючись по морському шляху, заходять у зони 17 радіолокаційного спостереження ПРРС-2. При цьому судна одночасно ведуть безперервне радіолокаційне спостереження станціями 23і-23 т , здійснюють радіообмін між собою та із ПРРС і за допомогою транспондерів АІС 25і-25 т , подають інформацію про своє місце положення, що надходить на приймальну станцію автоматичної інформаційної системи 5 координаційного центру 1 і радіостанції 24і-24 т суден, які знаходяться в акваторії. Автоматично підготовлені апаратнопрограмними засобами ПСАІС 5 і ПОНЗ 6 безконфліктні плани руху з оцінкою небезпеки зіткнень і рекомендації з їхнього запобігання по цифрових радіоканалах передаються на сервер 12 ПРРС 2 і в ЕОМ 13. Це дозволяє лоцманам-операторам з робочих місць 16, використовуючи УКХ радіостанцію 8, давати морським лоцманам на суднах 22-і 22щ рекомендації з вибору виду маневру для розходження або утримання суден на заданому курсі. При необхідності лоцмани-оператори уточняють або корегують свої дії з лоцманом-координатором КЦ 1, застосовуючи УКХ радіозв'язок між станціями 8 і 3. Для підвищення безпеки плавання потужність приймально-передавальних пристроїв радіолокаційних станцій 7і-7 п і їхнє розташування на узбережжі обрані так, щоб забезпечувалося одержання зон перекриття радіолокаційного спостереження суміжних ПРРС до 20-30%. Це дозволяє при підході та у зоні перекриття проводити підвищений, подвійний контроль за переміщенням суден з боку суміжних ПРРС. При цьому зона перекриття може досягати 5 миль. Якщо судна 22і і 22з (див. Фіг. 2) перебувають в зонах радіолокаційного спостереження 17 ПРРС 2 2 і ПРРС 2 3 , наприклад в акваторії ДніпроБузького лиману, то на відповідній ділянці морського шляху вони рухаються в зоні перекриття радіолокаційного спостереження двох ПРРС. Передавачі радіолокаційних станцій 23і і 23з суден 22і і 22з формують зондувальні імпульси надвисокої частоти, що передаються в антену радіолокаційної станції і випромінюються в навколишній простір Відбиті від зустрічного судна імпульси, попадають в антену і через волноводний тракт надходять на приймач радіолокаційних станцій, де підсилюються І перетворюються у відеосигнал місця положення судна, яке рухається назустріч. Так з обох суден 22і і 22з виконується взаємне радіолокаційне спостереження, яке забезпечує лоцманам на борту і капітанам безпечне проведення своїх суден. Передавачі радіолокаційних станцій 7г, 7з ПРРС-2 і ПРРС-3 аналогічно зондують водну поверхню акваторії у своїх зонах спостереження. Відбиті від суден 22 г 22з імпульси перетворюються приймачем радіолокаційної станції 7 2 і 7з у відеосигнал і по кабелю передаються на адаптери 10г і 10з відповідно, які сполучають аналогові виходи радіолокаційних станцій 7г і 7з з ЕОМ 11 2 і ЕОМ 11 3 . Програмне забезпечення цих ЕОМ створює файли, які містять інформацію про радіолокаційну обстановку в зонах спостереження 17 обох ПРРС і записує їх на мережний сервер 12 апаратнопрограмного комплексу 9. В одному файлі утримується інформація, що відповідає одному оберту антени радіолокаційної станції Наприклад, програма "Радар", розроблена ДП "Дельта-лоцман" і встановлена на ЕОМ 11, постійно звертається до сервера 12, бере з нього інформаційні файли і відбиває на дисплеї 14 робочого місця лоцмана-оператора 16 судноплавну обстановку в зоні спостереження радіолокаційних станцій 72-73. Лоцман-оператор з робочого місця 16 на дисплеї 14 стежить за швидкістю і напрямком переміщення суден і зв'язується по радіозв'язку з лоцманами (капітанами), забезпечуючи безпечне регулювання рухом суден у зонах спостереження 17 ПРРС-2 і ПРРС 3. Програма "Планшет", розроблена ДП "Дельталоцман" і встановлена на ЕОМ 13, відображає на 10 ПРРС-п Фіг. 2 Комп'ютерна верстка Н Лисенко Підписне Тираж 37 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for ship dispatching
Автори англійськоюVilskyi Hennadii Borysovych, Maltsev Anatolii Sydorovych
Назва патенту російськоюСистема управления движением суден
Автори російськоюВильский Геннадий Борисович, Мальцев Анатолий Сидорович
МПК / Мітки
МПК: B63B 43/00, G08G 7/00
Мітки: рухом, суден, система, керування
Код посилання
<a href="https://ua.patents.su/6-5127-sistema-keruvannya-rukhom-suden.html" target="_blank" rel="follow" title="База патентів України">Система керування рухом суден</a>
Система автоматичного керування рухом судна за курсом
Номер патенту: 54147
Опубліковано: 17.02.2003
Автор: Бугрім Леонід Іванович
МПК: B63B 45/00, B63B 49/00, B63H 25/00
Мітки: рухом, керування, судна, курсом, автоматичного, система
Формула / Реферат:
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного...
Система регулювання руху суден
Номер патенту: 42936
Опубліковано: 15.11.2001
Автори: Кравченко Олександр Іванович, Садовий Ігор Леонідович, Пілюгін Сергій Вікторович
МПК: G06F 15/163, G01S 13/91, G08G 3/00
Мітки: система, суден, руху, регулювання
Формула / Реферат:
1. Система регулювання руху суден, яка включає хоча б одну радіолокаційну станцію, що через пристрій для перетворення аналогового сигналу в цифровий код у вигляді процесорного блока комп'ютера з'єднана з пристроєм для візуалізації навігаційної обстановки у вигляді обладнаного монітором персонального комп'ютера, яка відрізняється тим, що до пристрою візуалізації навігаційної обстановки у вигляді обладнаного монітором персонального комп'ютера...
Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів

Номер патенту: 26296
Опубліковано: 19.07.1999
Автор: Мовчан Владімір Пєтровіч
МПК: G08G 1/017
Мітки: багатозонова, рухом, система, засобів, стаціонарно-пересувна, контролю, автотранспортних
Формула / Реферат:
1. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах, що містить безліч стаціонарно встановлених на дорогах зон контролю, в яких над дорогою встановлені освітлювачі та відеокамери з нахилом вниз відносно горизонтальної площини та з орієнтацією своїх об'єктивів назустріч руху автотранспорту, а також один або декілька комп'ютерів ідентифікації автотранспортних засобів, сервер з монітором для...
Система видалення відпрацьованих газів у двигуні з коловим рухом циліндрів
Номер патенту: 57170
Опубліковано: 16.06.2003
Автор: Зебров Віктор Михайлович
МПК: F02B 35/00
Мітки: рухом, видалення, газів, циліндрів, коловим, двигуні, відпрацьованих, система
Формула / Реферат:
1. Система видалення відпрацьованих газів у двигуні з коловим рухом циліндрів, що містить блок циліндрів, допоміжний колінчастий вал блока циліндрів з кривошипом, вихлопну трубу, з'єднану з циліндром, і глушник шуму, яка відрізняєтьзя тим, що вихлопна труба з'єднана з циліндром жорстко, а з глушником шуму - рухомо - через перехідну шайбу з отвором для вихлопної труби, установлену з можливістю обертання, а вісь обертання перехідної шайби...
Спосіб керування рухом поршня машини, пристрій для його здійснення і спосіб балансування цього пристрою
Номер патенту: 49973
Опубліковано: 15.10.2002
Автор: Негре Сіріл
МПК: F01B 9/02, F02B 75/32
Мітки: спосіб, здійснення, балансування, пристрій, цього, машини, рухом, поршня, пристрою, керування
Формула / Реферат:
1. Спосіб керування рухом поршня машини або компресора, або екологічно чистого двигуна, або двигуна, що характеризується пониженою токсичністю, який відрізняється тим, що рух поршня зупиняють, а сам поршень утримують в зоні верхньої мертвої точки у стані очікування протягом періоду часу, який дозволяє здійснити, у межах постійного об'єму, дії, при яких:- виконують операції запалювання та спалювання у двигунах з керованим процесом...
Попередній патент: Машина для виготовлення тонкого паперу
Наступний патент: Прилад для креслення алгебраїчних кривих вищого порядку
Випадковий патент: Підшипник ковзання