Спосіб керування шахтною підіймальною машиною
Номер патенту: 34603
Опубліковано: 11.08.2008
Автори: Смовж Олександр Леонідович, Безручко Юрій Миколайович
Формула / Реферат
1. Спосіб керування шахтною підіймальною машиною, що включає керування пусковим і гальмовим механізмами приводного двигуна підіймальної машини, вимір швидкості обертання приводного двигуна, визначення положення посудини у стволі шахти, вибір напрямку руху, регулювання приводу відповідно до тахограми підіймального циклу, який відрізняється тим, що попередньо у режимі настроювання підіймальної машини заміряють у контрольній точці руху посудини у стволі величину струму ![]() , що споживає двигун підіймальної машини, коли посудина, що піднімається, завантажена еталонною вагою гірничої маси
, що споживає двигун підіймальної машини, коли посудина, що піднімається, завантажена еталонною вагою гірничої маси ![]() , де
, де ![]() і
і ![]() - границі припустимих значень завантаження підіймальної машини, а парна посудина, що опускається, повністю розвантажена, після чого за отриманою інформацією встановлюють кореляційну залежність між параметрами
- границі припустимих значень завантаження підіймальної машини, а парна посудина, що опускається, повністю розвантажена, після чого за отриманою інформацією встановлюють кореляційну залежність між параметрами ![]() і
і ![]() , визначають коефіцієнти кореляції, потім у робочому режимі при підйомі посудини з вантажем
, визначають коефіцієнти кореляції, потім у робочому режимі при підйомі посудини з вантажем ![]() у тій же контрольній точці вимірюють величину струму, що споживає двигун підіймальної машини
у тій же контрольній точці вимірюють величину струму, що споживає двигун підіймальної машини ![]() , а по встановленій кореляційній залежності і коефіцієнтах кореляції обчислюють значення
, а по встановленій кореляційній залежності і коефіцієнтах кореляції обчислюють значення ![]() , яке відповідає
, яке відповідає ![]() , порівнюють заміряне й обчислене значення струму, що споживає двигун, і, якщо
, порівнюють заміряне й обчислене значення струму, що споживає двигун, і, якщо ![]() >
>![]() , обчислюють різницю
, обчислюють різницю ![]() і, відповідно до значення цієї різниці і встановленій кореляційній залежності, вагу вантажу в посудині, що спускається,
і, відповідно до значення цієї різниці і встановленій кореляційній залежності, вагу вантажу в посудині, що спускається, ![]() , де
, де ![]() - коефіцієнти кореляції, після чого формують інформаційний сигнал для дозуючого пристрою про наявність вантажу в посудині, що спускається, який дорівнює
- коефіцієнти кореляції, після чого формують інформаційний сигнал для дозуючого пристрою про наявність вантажу в посудині, що спускається, який дорівнює ![]() .
.
2. Спосіб за п. 1, який відрізняється тим, що підготовчий режим настроювання виконують при підйомі кожної з двох посудин з відповідним еталонним навантаженням і повним розвантаженням парної посудини, при цьому одержують дві кореляційні залежності, після чого в робочому режимі, при підйомі кожної завантаженої посудини для визначення наявності вантажу в парній посудині, використовують відповідну кореляційну залежність.
Текст
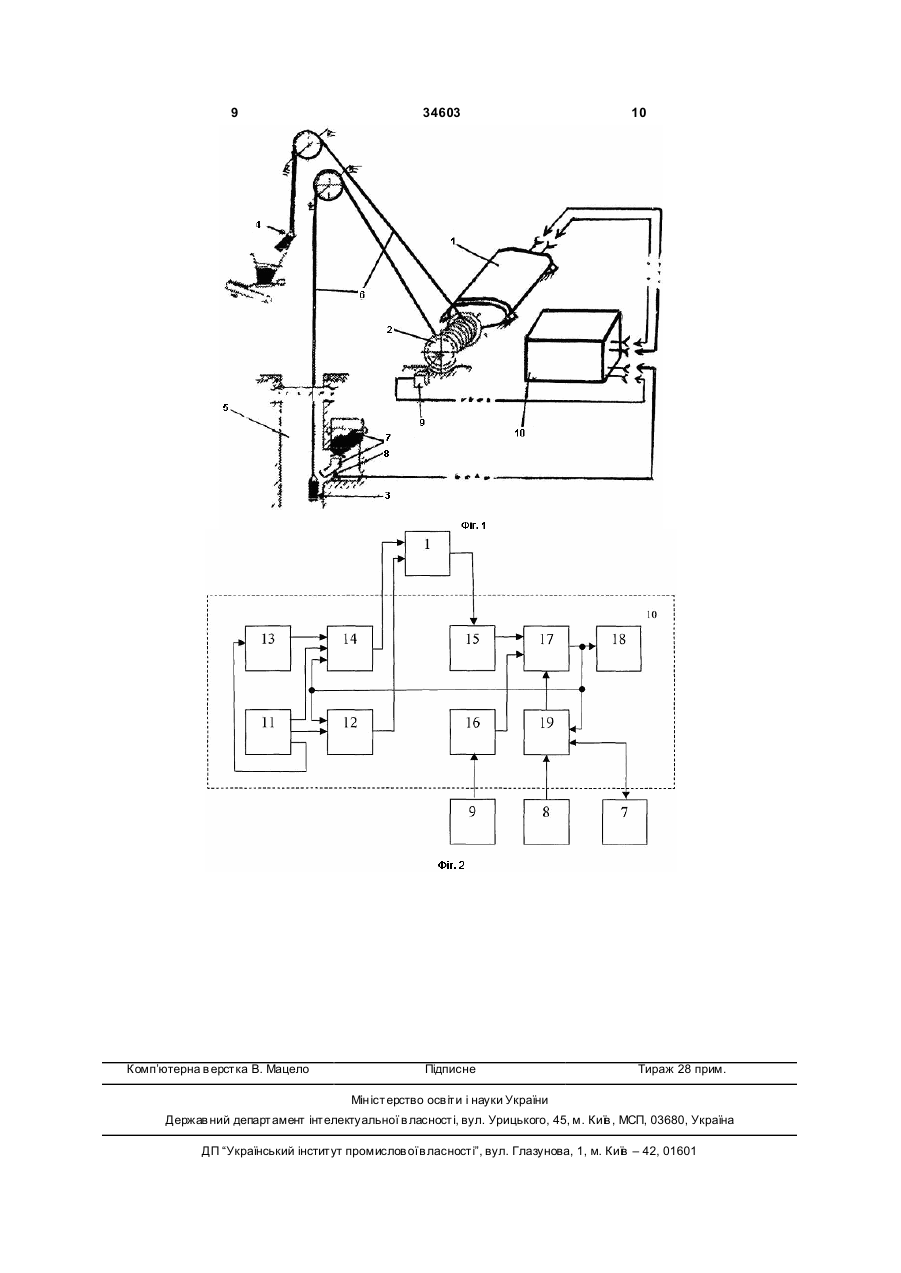
1. Спосіб керування шахтною підіймальною машиною, що включає керування пусковим і гальмовим механізмами приводного двигуна підіймальної машини, вимір швидкості обертання приводного двигуна, визначення положення посудини у стволі шахти, вибір напрямку руху, регулювання приводу відповідно до тахограми підіймального циклу, який відрізняється тим, що попередньо у режимі настроювання підіймальної машини заміряють у контрольній точці руху посудини у стволі величину стр уму I1e , I2e , KIie , KIne , що споживає двигун підіймальної машини, коли посудина, що піднімається, завантажена еталонною вагою гірничої маси P1e , P2e , KPie , KPne , де P1e і Pne - границі припустимих значень завантаження підіймальної машини, а парна посудина, що опускається, повністю розвантажена, після чого за отриманою інформацією встановлюють кореляційну залежність між параметрами Iie і Pie , визначають коефіцієнти кореляції, потім у робочому режимі при підйомі посудини з вантажем Pзав у тій же контрольній точці вимірюють величину струму, що споживає двигун підіймальної машини Іі в им , а по встановленій кореляційній залежності і коефіцієнтах кореляції обчислюють значення Iie , яке відпо Корисна модель відноситься до області керування підйомно - транспортувальними машинами і може бути використана для керування шахтною підіймальною машиною. Відомий спосіб керування шахтною підіймальною машиною згідно [а.с. SU №1101403 від 15.11.85г., МПК В66В1/28, «Устройство для управления шахтной подъемной машиной»], що включає керування пусковим і гальмовим механізмами підіймальної машини, вимір швидкості обертання приводу, вимір положення посудини у стволі шахти, вибір напрямку руху, регулювання приводу підіймальної машини відповідно до тахограми підіймального циклу. Основним недоліком відомого технічного рішення є те, що воно не дозволяє регулювати і контролювати навантаження на валу підіймальної машини, оскільки не включає вимір і коректування ступеня завантаження і розвантаження посудин (скіпів). Проблема контролю ступеня розвантаження посудин підіймальної машини і наступного його завантаження виникає при великій масі налиплого матеріалу в посудині при його розвантаженні, уна відає Ріе = Рзав , порівнюють заміряне й обчислене значення струму, що споживає двигун, і, якщо Iie > Іі в им , обчислюють різницю IS = Iie - Ii в им і, відповідно до значення цієї різниці і встановленій кореляційній залежності, вагу вантажу в посудині, що спускається, РS = f (IS , k1Kkn ) , де k1Kk n - коефіцієнти кореляції, після чого формують інформаційний сигнал для дозуючого пристрою про наявність вантажу в посудині, що спускається, який дорівнює PS . 2. Спосіб за п. 1, який відрізняє ться тим, що підготовчий режим настроювання виконують при підйомі кожної з двох посудин з відповідним еталонним навантаженням і повним розвантаженням парної посудини, при цьому одержують дві кореляційні залежності, після чого в робочому режимі, при підйомі кожної завантаженої посудини для визначення наявності вантажу в парній посудині, використовують відповідну кореляційну залежність. 34603 (13) U ) (19) UA (11) ( 3 34603 4 слідок високої міцності адгезії вмісту посудини, що ження підіймальних посудин, що перевищує розхарактерно для відкладень із пластичною і пухкою рахункову тягову здатність підіймальної машини, є структурою, наприклад залізорудних матеріалів. однією з основних причин аварій на підіймальних При цьому, неминуче подальше завантаження установках. частково не розвантаженої посудини призводить Задачею корисної моделі, що заявляється, є до її перевантаження і можливого виникнення підвищення надійності і безпеки способу керуванаварійних ситуацій. ня шахтною підіймальною машиною за рахунок Відоме технічне рішення способу керування контролю ступеня розвантаження посудини, яка шахтною підіймальною машиною відповідно до опускається, і відповідному наступному коректу[патенту RU №2010766 від 15.04.1994г. МПК ванні завантаження цієї посудини. В66В1/28 «Устройство для управления шахтной Поставлена задача вирішується тим, що в подъемной машиной» (найближчий аналог)]. Віспособі керування шахтною підіймальною машидоме рішення включає керування пусковим і гальною, що включає керування пусковим і гальмовим мовим механізмами підіймальної машини, вимір механізмами приводного двигуна підіймальної швидкості обертання приводу, вимір положення машини, вимір швидкості обертання приводного посудини в стволі шахти, вибір напрямку руху, двигуна, визначення положення посудини у стволі вимір крутильного моменту на валу двигуна, регушахти, вибір напрямку руху, регулювання приводу лювання приводу підіймальної машини відповідно у відповідності з тахограмою підіймального циклу, до тахограми підіймального циклу і величини крувідповідно до корисної моделі, попередньо, у ретильного моменту. жимі настроювання підіймальної машини заміряУ порівнянні з вищерозглянутим аналогом це ють у контрольній точці руху посудини у стволі технічне рішення враховує ступінь навантаження величину струм у I1e,I2e,KIie,KIne , що споживає на вал двигуна за допомогою виміру крутильного двигун підіймальної машини, коли посудина що моменту. Автори корисної моделі рахують що крупіднімається, завантажена еталонною вагою гіртильний момент відповідає фактичному навантаничої маси P1e,P2e ,KPie,KPne , де P1e і Pne , де женню. Крутильний момент міряють при руханні з рівномірною швидкістю посудини, що підіймається, у визначеній точці стволу і, для підвищення економічності, в залежності від значення крутильного моменту, регулюють напругу на затискачах двигуна підіймальної машини. Однак, значення крутильного моменту на валу може свідчити як про навантаження, що виникає в результаті винятково підіймання посудини з вантажем, так і про навантаження на вал, що виникає в результаті підіймання посудини з вантажем і одночасним опусканням парної посудини з вантажем, що залишився після її розвантаження в силу різних причин, тобто сумарного навантаження різноспрямованими силами ваги двох посудин. Відомий спосіб не враховує небезпеку ситуації з нерозвантаженою до кінця парною посудиною спосіб передбачає, по суті, тільки ситуацію, коли посудина що піднімається, завантажена гірничою масою, вага якої знаходиться в границі припустимих значень завантаження, а парна посудина повністю розвантажена. Але є велика ймовірність недостатнього ступеня розвантаження парної посудини і матеріал, що залишився в розвантаженій посудині, неминуче надійде на завантаження. При цьому, якщо доза завантаження відповідає номінальному завантаженню посудини, що звичайно має місце при автоматичному завантаженні у завантажувальному пристрої, у посудині одночасно опиниться і матеріал із завантажувального пристрою (номінальне завантаження) і нерозвантажена гірнича маса, і, таким чином, посудина піде на підйом перевантаженою, перевантажуючи двигун, привод і троси. Це може призвести до аварійної ситуації або захисного блокування шахтної підіймальної машини. У підсумку буде потрібна зупинка, ручне втручання в процес, що в остаточному рахунку призведе до втрати часу, ресурсів і продуктивності. У випадку, якщо перевантаження вийде за рамки можливостей підіймальної машини і тросів, це призведе до аварійної ситуації. Переванта Pie і Pne - границі припустимих значень завантаження підіймальної машини, а парна посудина, що опускається, повністю розвантажена, після чого, за отриманою інформацією, встановлюють кореляційну залежність між параметрами Iie і Pie , визначають коефіцієнти кореляції, потім, у робочому режимі при підійманні посудини з вантажем Pзав у тій же контрольній точці вимірюють величину струму, який споживає двигун підіймальної машини Іі вим , а по відомій кореляційній залежності і коефіцієнтам кореляції обчислюють значення Iie , яке відповідає Ріе = Рзав , порівнюють виміряне й обчислене значення струму і, якщо Iie > Іі вим , об ( ) числюють різницю IS = Iie - Ii вим і, відповідно до цієї різниці і встановленій кореляційній залежності, вагу вантажу в посудині що опускається: РS = f (IS ,k1Kk n ) , де k1 k n - коефіцієнти коK реляції, після чого формують інформаційний сигнал для дозуючого пристрою про наявність вантажу в посудині, що опускається, який дорівнює PS . Для більш точного контролю розвантаження посудин, підготовчий режим настроювання виконують при підійманні кожної з двох посудин з відповідним навантаженням і повним розвантаженням парної посудини, при цьому одержують дві кореляційні залежності, після чого в робочому режимі при підйомі кожної завантаженої посудини для визначення наявності вантажу в парній посудині використовують відповідну кореляційну залежність. Суть способу, який заявляється, полягає в тому що, якщо в режимі настроювання з еталонними вантажами ( Pie в одній посудині, а парна посудина повністю розвантажена) в контрольній точці 5 34603 руху посудини у стволі заміряти струм Iie , який споживає двигун підіймальної машини, то у робочому режимі порівняння величини робочого струму Іі вим і еталонного Iie в цій контрольній точці дає досить повну інформацію про ступінь розвантаження парної посудини. Цього достатньо щоб сформувати інформаційний сигнал для наступного завантаження парної посудини з урахуванням гірничої маси, що залишилася після розвантаження. Таким чином виключається можливість перевантаження частково нерозвантаженої парної посудини, яку опускають для завантаження, а разом з цим це дає можливість уникнути перевантаження двигуна і тросів, чим підвищується надійність способу і виключається можливість аварійної ситуації. Слід зазначити, що система, що складається з валу двигуна підіймальної машини, до якого прикладені різнонаправлені навантаження (посудини з двох сторін канатів), на практиці є досить складною для математичного опису з точки зору взаємозалежності струму, який споживає двигун, і вантажів у посудинах на тросах. Струм, який споживає двигун, залежить від ваги посудин, завантаження посудини що підіймається, ступеня розвантаження посудини, що опускається, ваги тросів, величина якої змінюється зі зміною положення посудин і безлічі інших факторів - змащення тросів, ступеня їх натягу, кліматичних факторів, коефіцієнту зчеплення між тросами і тросоведучим шківом і таке інше. Тому для встановлення залежності між величиною струму, який споживає двигун, і величиною завантаження посудин простіше і зручніше використовувати метод кореляції, як такий, що враховує всі сформовані фактори взаємного впливу всі х параметрів у конкретних умовах. При цьому з відомих курсів основ електроприводу між величиною навантаження на вал двигуна, і величиною струму, який споживає двигун Ii , існує залежність, яка є пропорційною у межах границь припустимих значень навантаження, що дозволяє для визначення характеру зв'язку між ними для інтервалу від P1e до Pne використовувати просту лінійну кореляцію Пірсона. Попереднє настроювання підіймальної машини, що полягає у вимірі струму I1e,I2e,KIie,KIne , що споживає двигун підіймальної машини, при підійманні однієї із своїх посудин, завантаженою еталонною вагою P1e,P2e ,KPie,KPne , де P1e і Pne - границя припустимих значень завантаження, і повному розвантаженні парної посудини, дає можливість зафіксувати еталонну (базову) модель роботи шахтної підіймальної машини і вирахува ти коефіцієнти кореляції. Після встановлення кореляційної залежності (тобто коефіцієнтів кореляції) обчислюють значення Iie , яке відповідає Ріе = Рзав : При його порівнянні з величиною виміряного струму, що споживає двигун ( Іі вим ), можливо сформувати інформаційний сигнал для пристрою завантаження посудини, що опускається (парної посудини). 6 Якщо Iie > Іі вим , то посудина, що опускається, не цілком розвантажена, оскільки, якщо парна посудина розвантажена не цілком, його вага, спрямована протилежно вазі завантаженої посудини, що підіймається, знизить результуюче навантаження на вал двигуна і струм, який споживає двигун, зменшиться. Різниця IS = Iie - Iiвим пропорційна вазі ван ( ) тажу в посудині, що опускається. Вагу вантажу можна визначити відповідно до кореляційної залежності: РS = f (IS ,k1Kk n ) , де k1 k n - коефіцієнти коK реляції. Ця величина є кількісною інформацією для завантаження посудини, що опускається. Якщо парна посудина розвантажена цілком, то визначений по величині Piэ = Рзав струм Ііэ буде відповідати величині струму Івим , а різниця у цьому випадку дорівнює нулеві. Сформований інформаційний сигнал дозволить скорегувати роботу завантажувального пристрою і виключити позаштатні ситуації при роботі шахтної підіймальної машини. Таким чином технічне рішення, що заявляється, цілком виключає аварійні ситуації, тобто вирішує поставлену задачу - підви щує надійність і безпеку способу керування шахтною підіймальною машиною за рахунок контролю ступеня розвантаження посудини, що опускається, і відповідному наступному коректуванні завантаження цієї посудини. Це підтверджується прикладом конкретної реалізації способу. На Фіг.1 показана схема роботи шахтної підіймальної машини. На Фіг.2 показана блок - схема пристрою для керування шахтною підіймальною машиною, що реалізує спосіб. Спосіб був реалізований на шахті Гвардійська з наступними характеристиками скіпового підйому: - глибина - 1412 метрів; - межа припустимих значень завантаження посудини (скіпу) від 22,5т. до 27,5т. Для реалізації технічного рішення використовували типову шахтну піднімальну машину, що складається з електричного двигуна 1, привід якого з'єднаний принаймні з одним тросовим барабаном 2. Посудини (скіпи) 3, 4 для підйому вантажу зі ствола 5 шахти кріпляться до вільних кінців троса 6, що намотується на барабан 2 так, що обертання барабана 2 піднімає одну із посудин, наприклад посудину 3, тоді як інша посудина 4 опускається. Розвантажують посудини на поверхні шляхом автоматичного відкриття їх секторного затвору. Завантажують посудину (скіп) у нижній точці підйому у камері дозування за допомогою дозуючого пристрою 7, який забезпечує автоматичне завантаження в скіпи 3, 4 заданої порції гірничої маси, вага якої вимірюється тензодатчиком 8 дозуючого пристрою 7. Для визначення положення посудин 3, 4 у стволі ша хти і швидкості їх р уху використовують 7 34603 8 інформацію від датчиків 9 (поворотних шифратоопускається, PS =0,5/0,1=5т. Ця інформація дозворів). лила сформувати блоку 17 сигнал для блоку 19 Блок керування 10 шахтною підіймальною керування завантаженням про наявність 5т вантамашиною включає блок 11 пуску, блок 12 гальмужу в посудині 4, що опускається, і необхідності вання, блок 13 вибору напрямку руху, блок 14 кевідповідного корегування уставки дозування для рування двигуном 1, блок 15 виміру струму, що завантажувального пристрою 7. споживає двигун 1, блок 16 визначення параметрів При підійманні посудини 3 з вантажем руху посудин (скіпів), блок 17 аналізу й обчислень, Pзав =21т. блок 15 заміряв величину струму, який блок 18 відображення інформації для оператора, споживає двигун підіймальної машини блок 19 керування завантаженням. Спосіб реалізується таким чином : =2,1кА. Для цього значення обчислений Іі вим У режимі настроювання підіймальної машини струм склав Iiэ = 2,1 . Різниця IS = Iie - Ii вим =0, кА блок 15 вимірює у контрольній точці руху посудини у стволі (у якості контрольної точки використовущо засвідчило про те, що посудина 4 розвантажевали точку урівноваження тросів - точку зустрічі на цілком. скіпів) величину стр уму, який споживає двигун 1 Режим настроювання був проведений для кожної з двох посудин з тим же обсягом вибірки (7). підіймальної машини I1e,I2e,KIie,KIne при відпоПри цьому були отримані дві кореляційні залежновідному завантаженні P1e,P2e ,KPie,KPne , де P1e сті: і Pne - границі припустимих значень завантаження Iie = 0,1´ Pie [кА], для скіпа 3 при його підіпосудини 3, що підіймається ( P1e =22,5т., йманні і скіпа 4 - при опусканні; Iie = 0,007 + 0,1´ Pie [кА], для скіпа 4 при його Pne =27,5Т), і повному розвантаженні парної посупідійманні і скіпа 3 - при опусканні. дини 4, що відповідно опускається. Усього було Ці залежності враховувалися в робочому резроблено сім (7) замірів. Дані про вагу порцій гіржимі підіймальної машини. Режим настроювання ничої маси P1e - Pne надходили від тензодатчика 8 проводили в автоматичному режимі один раз на дозуючого пристрою 7 через блок 19 керування добу в один і той же час при умові гарантовано завантаженням у блок 17 аналізу й обчислень, завантаженого скіпа і повністю розвантаженого туди ж надходили відповідні дані про величину парного скіпа. При цьому перевіряли відповідність струму I1e - Ine . У результаті обробки обсягу вибізаміряного струму еталонному. У випадку коли значення не співпадали, то перераховували парарки (7) одержали коефіцієнти кореляції і залежметри кореляційної залежності, які і використовуність, що визначає характер зв'язку між Iie і Pie : вали в подальшій роботі підіймальної машини. Iie = 0,1´ Pie [кА]. За час пробної експлуатації підіймальної машини з використанням запропонованого рішення У межах припустимих границь зміни ваги завантаження гірничої маси в посудині така залежспособу керування шахтною підіймальною машиність з достатньою точністю визначає параметри ною (6 місяців) не було випадків захисного блокупроцесу. вання або зупинки процесу роботи підіймальної Потім, у робочому режимі при підйомі посудимашини через перевантаження скіпів. Таким чином технічне рішення способу керуни 3 з вантажем Pзав =25т. у контрольній точці вання шахтною підіймальною машиною, що заяввимірили величину струму, що споживає двигун ляється, дозволяє вирішити поставлену задачу підіймальної машини Іі вим =2,0кА, а по відомій підвищення надійності і безпеки способу за раху ( кореляційній залежності і коефіцієнтам кореляції блок 17 обчислив значення: Iie =2,5кА для відповідного Ріе = Рзав (25т). Порівняння заміряного й обчисленого значень струму показують, що Iie > Іі вим , тобто у скіпі, що опускається залишилась гірнича маса. Визначили різницю IS = Iie - Ii вим , яка дорівнює 0,5кА і, від ( ) повідно до цієї різниці, вагу вантажу в посудині, що ) нок контролю ступеня розвантаження посудини, що опускається, і відповідного наступного коректування завантаження цієї посудини. Відсутність нештатних і аварійних ситуацій у роботі шахтної підіймальної машини дає можливість підвищити продуктивність підіймальної машини і шахти в цілому. 9 Комп’ютерна в ерстка В. Мацело 34603 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of winder control
Автори англійськоюSmovzh Oleksandr Leonidovych, Bezruchko Yurii Mykolaiovych
Назва патенту російськоюСпособ управления шахтной подъемной машиной
Автори російськоюСмовж Александр Леонидович, Безручко Юрий Николаевич
МПК / Мітки
МПК: B66B 1/28
Мітки: спосіб, керування, шахтною, машиною, підіймальною
Код посилання
<a href="https://ua.patents.su/5-34603-sposib-keruvannya-shakhtnoyu-pidijjmalnoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування шахтною підіймальною машиною</a>
Пристрій керування гірничою машиною
Номер патенту: 1810
Опубліковано: 15.05.2003
Автори: Мезніков Артур Володимирович, Стаднік Микола Іванович
МПК: G08C 19/16
Мітки: керування, пристрій, гірничою, машиною
Формула / Реферат:
Пристрій керування гірничою машиною, що містить джерела живлення, розташовані в станції керування, переносний пульт керування і виконавчі механізми, який відрізняється тим, що він оснащений блоком керування, розташованим поза станцією керування і з'єднаним із джерелами живлення, пультом дистанційного керування і виконавчими механізмами.
Спосіб керування барабанною промивною машиною
Номер патенту: 52029
Опубліковано: 16.12.2002
Автори: Петренко Руслан Олександрович, Воробйов Олександр Андрійович, Галушко Олег Михайлович
МПК: B03B 5/56
Мітки: машиною, спосіб, керування, промивною, барабанною
Формула / Реферат:
Спосіб керування барабанною промивною машиною (БПМ), що включає формування сигналу керування частотою обертання приводу барабана, визначення величини неузгодженості заданого (qзад) і поточного значення заповнення барабана (q), який відрізняється тим, що задають необхідне значення ефективності розмиву (eзад) і визначають поточне значення ефективності розмиву у відповідності з наступним виразом:
Система керування машиною контактного стикового зварювання оплавленням
Номер патенту: 79064
Опубліковано: 10.05.2007
Автори: Норка Сергій Петрович, Голіков Андрій Васильович, Назімов Сергій Петрович, Глазов Сергій Емірович
МПК: B23K 11/25, B23K 11/24
Мітки: стикового, керування, зварювання, оплавленням, система, контактного, машиною
Формула / Реферат:
1. Система керування машиною контактного стикового зварювання оплавленням, яка містить електрично зв’язані між собою блок задання програми, блок контролю тривалості короткого замикання, блок виміру величини осадки і систему сигналізації, причому до виходу блока задання програми приєднані входи блока визначення моменту закінчення контролю коротких замикань і блока керування градієнтом швидкості переміщення деталей, що зварюються, до входу...
Спосіб автоматичного керування змішувально-зарядною машиною
Номер патенту: 28722
Опубліковано: 25.12.2007
Автори: Носов Володимир Миколайович, Стеценко Анатолій Семенович
МПК: E02F 9/20, G05D 27/00
Мітки: змішувально-зарядною, автоматичного, спосіб, керування, машиною
Формула / Реферат:
Спосіб автоматичного керування змішувально-зарядною машиною, що включає операції введення в базу даних сигналів датчиків і опорних сигналів, порівняння сигналів, формування керувального сигналу і сигналу аварійного відключення на виконавчі механізми, який відрізняється тим, що заздалегідь задають умов робочих режимів технологічного процесу змішувально-зарядної машини і у...
Спосіб (варіанти) та система для керування потоком між контролером базової станції і базовою приймально-передавальною станцією, пристрій керування обчислювальною машиною

Номер патенту: 80102
Опубліковано: 27.08.2007
Автори: Вудал Лейф, Камат Санджай, Конгелф Майкл А.
МПК: H04L 12/56, H04Q 7/30
Мітки: спосіб, система, варіанти, машиною, обчислювальною, керування, станції, станцією, пристрій, базовою, потоком, приймально-передавальною, базової, контролером
Формула / Реферат:
1. Спосіб керування потоком між контролером базової станції і базовою приймально-передавальною станцією, що містить етапи, на яких:прирощують значення лічильника індикації потоку, що відображає оновлене число пакетів даних, переданих з буфера;визначають розмір вікна буфера, коли оновлене число пакетів даних, переданих з буфера, виявиться рівним або більшим, ніж порогове число;визначають ідентифікаційний номер (ІН) пакета...
Попередній патент: Спосіб визначення температури склування аморфних полімерів
Наступний патент: Спосіб моделювання ішемічного пошкодження мозку
Випадковий патент: Застосування бактерій роду deinococcus для одержання біопалива