Спосіб керування барабанною промивною машиною
Номер патенту: 52029
Опубліковано: 16.12.2002
Автори: Галушко Олег Михайлович, Петренко Руслан Олександрович, Воробйов Олександр Андрійович
Формула / Реферат
Спосіб керування барабанною промивною машиною (БПМ), що включає формування сигналу керування частотою обертання приводу барабана, визначення величини неузгодженості заданого (qзад) і поточного значення заповнення барабана (q), який відрізняється тим, що задають необхідне значення ефективності розмиву (eзад) і визначають поточне значення ефективності розмиву у відповідності з наступним виразом:
![]() ,
,
де: ![]() - коефіцієнти, що враховують конструктивні параметри барабанної промивної машини;
- коефіцієнти, що враховують конструктивні параметри барабанної промивної машини;
![]() - поточне значення частоти обертання барабана;
- поточне значення частоти обертання барабана;
![]() - пропускна здатність барабана,
- пропускна здатність барабана,
і одночасно з цим визначають поточне значення заповнення барабана (q) відповідно до виразу:
![]() ,
,
де: ![]() - вхідна продуктивність;
- вхідна продуктивність;
![]() - час промивання,
- час промивання,
![]() ,
,
де: c - коефіцієнт, що залежить від конструктивних параметрів БПМ;
![]() - діаметр БПМ;
- діаметр БПМ;
![]() - довжина БПМ,
- довжина БПМ,
а сигнал керування частотою обертання приводу барабана формують як різницю між (eзад) і (e), а так само різницю між (qзад) і (q).
Текст
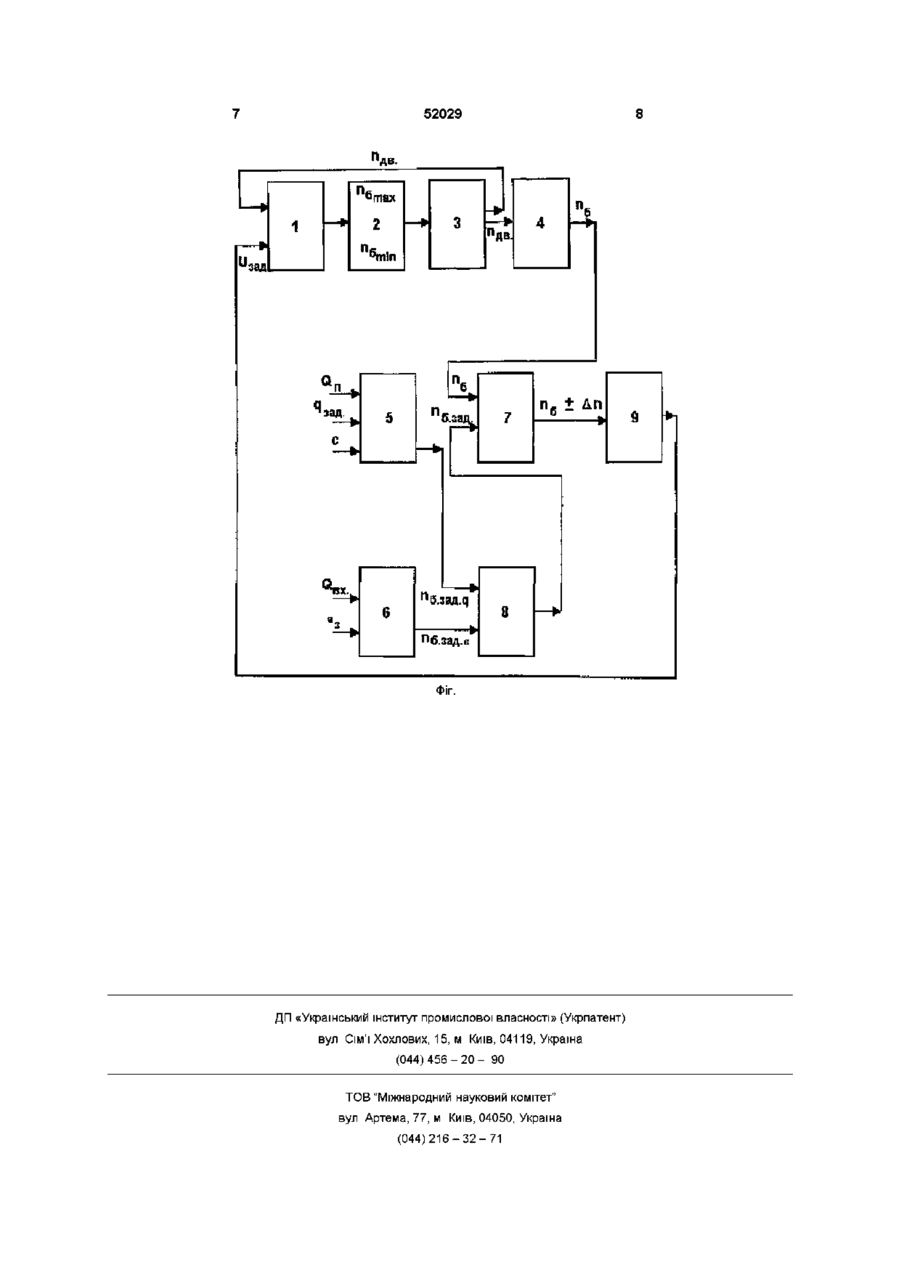
Спосіб керування барабанною промивною машиною (БПМ), що включає формування сигналу керування частотою обертання приводу барабана, визначення величини неузгодженості заданого (Чзад) і поточного значення заповнення барабана (q), який відрізняється тим, що задають необхідне значення ефективності розмиву (s3afl) і визначають поточне значення ефективності розмиву у ВІДПОВІДНОСТІ з наступним виразом бана, Q n - пропускна здатність барабана, і одночасно з цим визначають поточне значення заповнення барабана (q) ВІДПОВІДНО ДО виразу s=ko+kin6-k2Qn. де ko,k-|,k.2 - коефіцієнти, що враховують конструктивні параметри барабанної промивної машини, rig - поточне значення частоти обертання бара Іб - довжина БПМ, а сигнал керування частотою обертання приводу барабана формують як різницю між (s3afl) і (s), а так само різницю між (q3afl) і (q) Винахід відноситься до керування барабанними промивними машинами (БПМ), призначеними для промивання руди розсипних родовищ і нерудних будівельних матеріалів Відомий спосіб керування барабаном, який ґрунтується на тому, що з метою збільшення продуктивності, вимірюють товщину шару зерен безпосередньо в зоні їхнього руху При цьому, сигнал здавача товщини зерен подається на електропривод барабана, в результаті чого підтримується оптимальна величина заповнення барабана /Ас СРСР №950441 кл В 03 В 5/56/ Суттєвим недоліком даного способу є наявність датчика в зоні руху зерен, що приводить до швидкого його виходу з ладу Крім того, нерівномірність розподілу завантаження в барабані, приводить до погрішності виміру товщини шару Найбільш близьким по технічній суті до запропонованого способу, являється спосіб керування БПМ, заснований на регулюванні частоти обертання и барабана пропорційно величині неузгодженості між заданим навантаженням приводу і її поточного значення При цьому способі, з метою збільшення точності керування, величину завдання навантаження приводу формують як суму величин, пропорційних частоті обертання барабана, вхідної продуктивності машини і навантаження її холостої ходи, причому остання є зростаюча функція частоти обертання барабана, величина зміни якої задається у визначених межах /А с СРСР №1652457, кл Е 02 F 3/88/ Недолік даного способу полягає в наступному БПМ обладнані даною системою керування, підтримують тільки задану пропускну здатність (Qn), при цьому не дозволяють забезпечувати задану ефективність процесу дезинтеграцм (є) В основу винаходу поставлена задача удосконалення способу керування барабанною промив q = —^-т, 3600 Де Q B X - вхідна продуктивність, х - час промивання, T _ c d 6 l 6 де с - коефіцієнт, що залежить від конструктивних параметрів БПМ, dg - діаметр БПМ, о ю 52029 ною машиною, у котрому шляхом іншого формування сигналу керування частотою обертання приводу барабана, досягається підтримка заданої ефективності процесу дезинтеграцм (s) й оптимального завантаження барабана (q), а в період спадів вхідної продуктивності зменшення споживаної потужності, і за рахунок цього зниження витрат на одиницю готової продукції Поставлена задача вирішується тим, що у відомому способі керування БПМ, що включає формування сигналу керування частотою обертання приводу барабана, визначення величини неузгодженості заданого і поточного значення заповнення барабана (q), згідно з винаходом, задають необхідне значення ефективності розмиву (єзад), визначають поточне значення ефективності розмиву у ВІДПОВІДНОСТІ з наступним виразом є = ко + к і п б - k 2 Q n де ко,кі,к.2 - коефіцієнти, що враховують конструктивні параметри барабанної промивної машини, П - поточне значення частоти обертання баб рабана, Qn - пропускна здатність барабана, і одночасно з цим визначають поточне значення заповнення барабана (q) ВІДПОВІДНО ДО виразу q = —?^x 3600 де QBX - вхідна продуктивність, х - час промивання cd б'б де с - коефіцієнт, що залежить від конструктивних параметрів БПМ, dg - діаметр БПМ, Іб - довжина БПМ, а сигнал керування частотою обертання приводу барабана формують як різницю між (s3afl) і (є), а так само як різницю між (q3afl) і (q) На фігурі зображена схема, що реалізує даний спосіб керування, і виконує функцію керування частотою обертання барабана приводом БПМ для підтримки необхідної ефективності процесу дезинтеграцм і необхідної пропускної здатності Схема включає регулятор частоти обертання приводу барабана 1, блок обмеження швидкості обертання барабана 2, привід барабана 3, барабанну промивну машину 4, обчислювальні блоки (ОБ) 5 і 6, функціональні перетворювачі (ФП) 7, 8 і 9 В способі керування барабанною промивною машиною передбачено два канали керування частотою обертання приводу барабана перший по пропускній здатності, другий по ефективності процесу дезинтеграцм По першому каналу керування передбачається введення в пристрій керування сигналів, пропорційних вхідної продуктивності (QBX) І оптимальній величині заповнення барабана (q3afl), а також контроль двох параметрів частоти обертання барабана барабанної промивної машини і дійсної КІЛЬКОСТІ оброблюваного матеріалу який знаходиться в барабані Поточне значення заповнення барабана барабанної промивної машини (4) будемо визначати аналітичне ВІДПОВІДНО ДО виразу 3600 де х- час промивання cd6l6 х= п б де с- коефіцієнт, що залежить від конструктивних параметрів БПМ, de - діаметр БПМ, Іб - довжина БПМ, Пб - частота обертання БПМ У випадку відхилення величини заповнення барабана БПМ (4) від заданої будемо корегувати частоту обертання приводу барабана БПМ (3) при цьому, не допускаючи осадження і центрифупровання оброблюваного матеріалу По другому каналу керування передбачається введення в пристрій керування сигналу, пропорційного пропускної здатності барабана (Qn) тому, що ефективність процесу дезинтеграцм залежить не тільки від вхідної продуктивності (QBX), але і від КІЛЬКОСТІ матеріалу, що накопичується в барабанній промивній машині (q), а також сигналу пропорційного заданої ефективності процесу дезинтеграцм (є3ад)' Оскільки пропускна здатність залежить не тільки від вхідної продуктивності, але і від КІЛЬКОСТІ матеріалу, що знаходиться в барабані БПМ (4), розрахунок ефективності будемо визначати у ВІДПОВІДНОСТІ з наступним виразом, отриманим експериментальне є= ko+kin6-k2Qn де ko, k-i, к2 - коефіцієнти, що враховують конструктивні параметри барабанної промивної машини У випадку відхилення заданої величини ефективності процесу дезинтеграцм (s3afl) і його дійсного значення, здійснюють коригування частоти обертання приводу барабана БПМ (3), не допускаючи центрифупровання та осадження завантаження Спосіб передбачає безперервне обчислення (q) і (є), що у свою чергу забезпечує безупинне формування керуючого сигналу по двох каналах на регулятор частоти обертання приводу БПМ (1), пропорційного оптимальній величині завантаження барабана, в результаті, як при піках вихідної продуктивності, так і при спадах забезпечується підтримка необхідної пропускної здатності БПМ за рахунок оптимального завантаження барабана БПМ (4) Вихідний ПОТІК складає вхідну продуктивність наступних стадій (QBX) Оптимальному завантаженню барабана відповідає найбільше значення ефективності дезинтеграцм при даній продуктивності, причому перевага віддається забезпеченню необхідної ефективності процесу дезинтеграцм В обчислювальному блоці 5 реалізують залежність cQpy q 3 a A 3600 В обчислювальному блоці 6 реалізують залежність 52029 В функціональному перетворювачі 8 порівнюють (Пбзадд) Й (Пбзадг), ТЭ ОбирЭЮТЬ Необхідну ВЄличину завдання на швидкість В функціональному перетворювачі 7, визначають неузгодженість між необхідною величиною завдання на швидкість обертання барабана БПМ (4) і його дійсної швидкості обертання В функціональному перетворювачі 9 визначають величину керуючого впливу Розглянемо реалізацію даного способу при різних умовах, що викликають зміну навантаження приводу барабана (3) барабанної промивної машини (4) При збільшенні вхідної продуктивності (QBX) буде збільшуватись (q) і зменшуватись (s) Для підтримки (q3afl) і (£3ад) необхідно збільшувати частоту обертання барабана Система керування визначить необхідну частоту обертання барабан (Пбзадд) (ОБ 5) для підтримки заданої оптимальної величини заповнення барабана і необхідну частоту обертання барабана (Пбзадє) (ОБ 6) для забезпечення заданої ефективності процесу дезинтеграцм Потім вона проведе їхнє порівняння між собою (ФП 8) ЯКЩО (Пбзадг) МЄНШЄ (Пбзадд), ТО СИСТЄМЗ Керу вання видає сигнал на обертання барабана зі ШВИДКІСТЮ (Пбзадд) ( Ф П 8) ТОМу, ЩО При ЦЬОМу буДЄ підтримуватися необхідна ефективність процесу дезинтеграцм і необхідна пропускна здатність ЯК НаСЛІДОК, ЗбіЛЬШИТЬСЯ ріЗНИЦЯ (Пбзадд) ~ (Пб) (ФП 7), що приведе до збільшення керуючого впливу (ФП 9) і, як наслідок, до збільшення напруги регулятора частоти обертання приводу барабана (1), а потім і швидкості обертання приводу барабана (3), в результаті чого збільшиться швидкість обертання барабана (4) (Пб) Все це СПРИЧИНЯЄ ВІДНОВЛеННЯ ріЗНИЦІ (Пбзадд) ~ (Пб), ЗЛЄ вже при більшому значенні частоти обертання барабана ЯКЩО (Пбзадг) ВИЯВИТЬСЯ біЛЬШЄ (Пбзадд), ТО СИ стема керування видає сигнал на обертання барабана ІЗ ШВИДКІСТЮ (Пбзадг) (ФП 8) ПІДТрИМуЮЧИ ефективність процесу дезинтеграцм, зневажаючи підтримкою необхідної пропускної здатності В результаті ЗбіЛЬШИТЬСЯ ріЗНИЦЯ (Пбзадє)-(пб) (ФП 7), що приведе до збільшення керуючого впливу (ФП 9) і, як наслідок, до збільшення напруги регулятора частоти обертання приводу барабана (1), а потім і швидкості обертання приводу барабана (3), в результаті чого збільшиться швидкість обертання барабана (4) (Пб) Все це СПРИЧИНЯЄ За СОбОЮ ВІДНОВЛеННЯ ріЗНИЦІ (Пбзадг)" (Пб) (ФП 7), але вже при більшому значенні частоти обертання барабана При зниженні (QBX) система керування буде працювати аналогічно лише з тієї різницею, що для підтримки (q3afl) і (езад) на заданому рівні необхідно зменшувати швидкість обертання барабана ЯКЩО (Пбзадг) МЄНШЄ (Пбзадд), ТО СИСТЄМа Керу вання видає сигнал на обертання барабана із ШВИДКІСТЮ (Пбзадг) ( Ф П 8) ПІДТрИМуЮЧИ Необхідну ефективність процесу дезинтеграцм і зневажаючи ПІДТРИМКОЮ Необхідної ПРОПУСКНОЇ ЗДаТНОСТІ (q 3 afl) В результаті цього збільшиться різниця (Пб)(Пбзадг) ( Ф П 7) І ВІДНОВЛеННЯ ріЗНИЦІ Відбудеться при меншій швидкості обертання барабана барабанної промивної машини Це дозволить підтримувати необхідну ефективність дезинтеграцм ЯКЩО (Пбзадг) ВИЯВИТЬСЯ біЛЬШЄ (Пбзадд), ТО СИСТЄМа керування видає сигнал на обертання барабана ІЗ ШВИДКІСТЮ (Пбзадд), (ФП 8), ПІДТрИМуЮЧИ необхідний коефіцієнт заповнення барабана, причому ефективність процесу дезинтеграцм не опуститься нижче заданого рівня В результаті цього збільшиться різниця (Пб)(Пбзадд) ( Ф П 7) І ВІДНОВЛЄННЯ ріЗНИЦІ Відбудеться при меншій швидкості обертання барабана барабанної промивної машини Це дозволить підтримувати необхідний коефіцієнт заповнення барабана і не знижувати ефективність процесу дезинтеграцм, при цьому в процесі роботи система керування не дозволить змінювати швидкість обертання барабана вище або нижче встановленої межи (2) Як наслідок досягається збільшення виходу готового продукту при великих продуктивностях і зниження споживання електроенергії при малих продуктивностях, а також необхідна вхідна продуктивність для наступних стадій дезинтеграцм 52029 Фіг. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling drum washing machine
Автори англійськоюVorobiov Oleksandr Andriiovych, Halushko Oleh Mykhailovych
Назва патенту російськоюСпособ управления барабанной промывочной машиной
Автори російськоюВоробьев Александр Андреевич, Галушко Олег Михайлович
МПК / Мітки
МПК: B03B 5/56
Мітки: барабанною, керування, спосіб, машиною, промивною
Код посилання
<a href="https://ua.patents.su/4-52029-sposib-keruvannya-barabannoyu-promivnoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування барабанною промивною машиною</a>
Спосіб керування барабанною промивочною машиною
Номер патенту: 4674
Опубліковано: 28.12.1994
Автори: Галушко Олег Михайлович, Воробйов Олександр Андрійович, Соколов Володимир Іннокентійович, Букін Андрій Олександрович
МПК: E02F 3/88
Мітки: барабанною, машиною, промивочною, спосіб, керування
Формула / Реферат:
(57) Способ управления барабанной промывочной машиной, включающий формирование величины нагрузки привода как сумму величин, пропорциональных частоте вращения барабана, исходной производительности машины и нагрузке ее холостого хода, являющейся возрастающей функцией часто ты вращения барабана с заданными границами изменения и регулирования частоты вращения барабана пропорционально вели чине рассогласования между величиной за данной нагрузки...
Пристрій для керування самохідною збиральною машиною
Номер патенту: 30679
Опубліковано: 15.12.2000
Автори: Маланчин Анатолій Миколайович, Бучковський Петро Андрійович, Кондрачук Петро Іванович, Мартиненко Володимир Якимович, Безпальок Андрій Петрович, Калайджан Олександр Самвелович, Пісний Микола Олексійович
МПК: A01B 69/00
Мітки: пристрій, керування, машиною, самохідною, збиральною
Формула / Реферат:
1. Пристрій для керування самохідною збиральною машиною, який включає гідромеханічну систему відстежування з копіруючими щупами, гідроциліндр повороту напрямних коліс і механізм ручного керування, оснащений коригувальним гідроциліндром, гідросистему з гідроциліндрами для переводу копіруючих щупів і робочих органів машини з робочого в транспортне положення, який відрізняється тим, що напірна магістраль золотника з'єднана запірним пристроєм з...
Гідросистема керування навантажувальною машиною
Номер патенту: 39198
Опубліковано: 15.06.2001
Автори: Криворотько Олег Дмитрович, Левін Олександр Михайлович
Мітки: навантажувальною, гідросистема, керування, машиною
Формула / Реферат:
1. Гидросистема управления погрузочной машиной на гусеничном ходу с гидромоторами для каждой гусеницы, связанными подводящими и отводящими магистралями с управляемыми гидрораспределителями хода, соединенными напорной магистралью с гидронасосом, отличающаяся тем, что она выполнена с гидравлическим блоком, снабженным тремя напорными золотниками и гидрораспределителем управления, при этом два первых напорных...
Спосіб керування газорозрядною електронною гарматою
Номер патенту: 44000
Опубліковано: 15.01.2002
Автори: Котик Олександр Валерійович, Новіков Анатолій Олександрович
МПК: H01J 37/00
Мітки: електронною, газорозрядною, керування, спосіб, гарматою
Формула / Реферат:
1.Спосіб керування газорозрядною електронною гарматою шляхом зміни струму розряду та електричного поля в області розповсюдження електронного променя, який відрізняється тим, що в області розповсюдження електронного променя газорозрядної електронної гармати виділяють та змінюють змінну складову струму розряду та електричного поля.2. Спосіб по п. 1, який відрізняється...
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Кузьмін В'ячеслав Павлович, Доценко Борис Іванович, Косовенко Євген Вікторович, Коростельов Олег Петрович, Семенов Леонід Антонович
МПК: F42B 15/01, G05B 11/01
Мітки: ракети, амплітудно-фазових, спосіб, викривлень, обертової, керування, системі, компенсації
Формула / Реферат:
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід...
Попередній патент: Сепаратор краплинної вологи
Наступний патент: Клітка для навісного утримання дрібних тварин і птиці
Випадковий патент: Ротаційна циліндрична протяжка