Самоналагоджувальна система
Номер патенту: 36671
Опубліковано: 10.11.2008
Автори: Марчук Олександр Анатолійович, Хобін Віктор Андрійович

Формула / Реферат
Самоналагоджувальна система, яка містить регулюючий блок, з'єднаний виходом з входом виконавчого механізму, який виходом з'єднаний з першим входом блока множення та входом об'єкта регулювання, підключеного виходом до першого входу суматора, другого входу першого блока параметричного зворотного зв'язку та другого входу другого блока параметричного зворотного зв'язку, інерційний блок, вхід якого з'єднаний з виходом блока множення, а вихід - з інформаційним входом першого блока запізнення, третім входом суматора та третім входом першого блока параметричного зворотного зв'язку, перший блок запізнення, з'єднаний виходом з четвертим входом суматора, інформаційним входом другого блока запізнення та першим входом другого блока параметричного зворотного зв'язку, вихід якого з'єднаний з другим входом блока множення, другий блок запізнення, вихід якого з'єднаний з першим входом першого блока параметричного зворотного зв'язку, виходом з'єднаного з керуючими входами першого та другого блоків запізнення, яка відрізняється тим, що в неї додатково введені фільтри високих частот, крізь які проходять усі вхідні сигнали першого та другого блоків параметричного зворотного зв'язку.
Текст
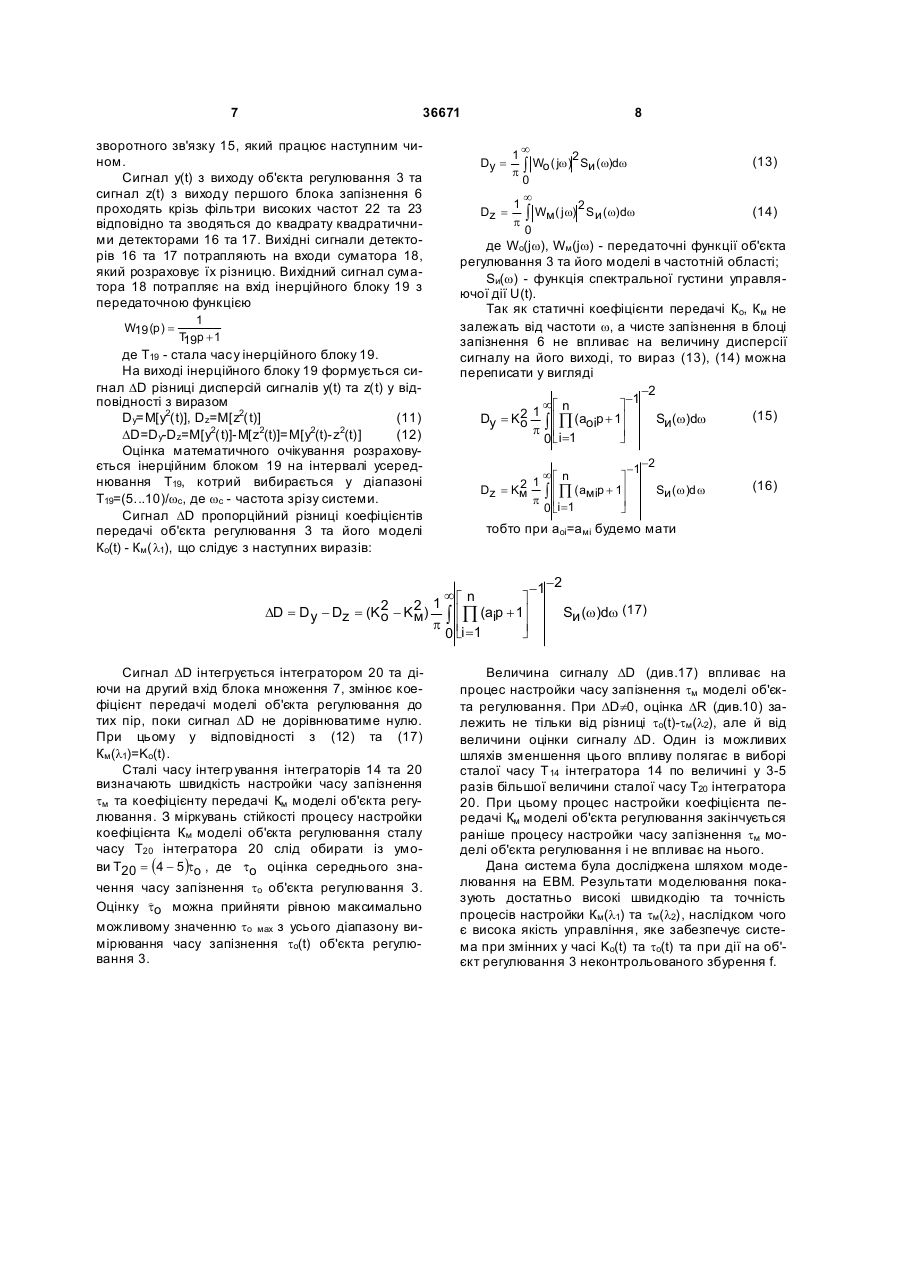
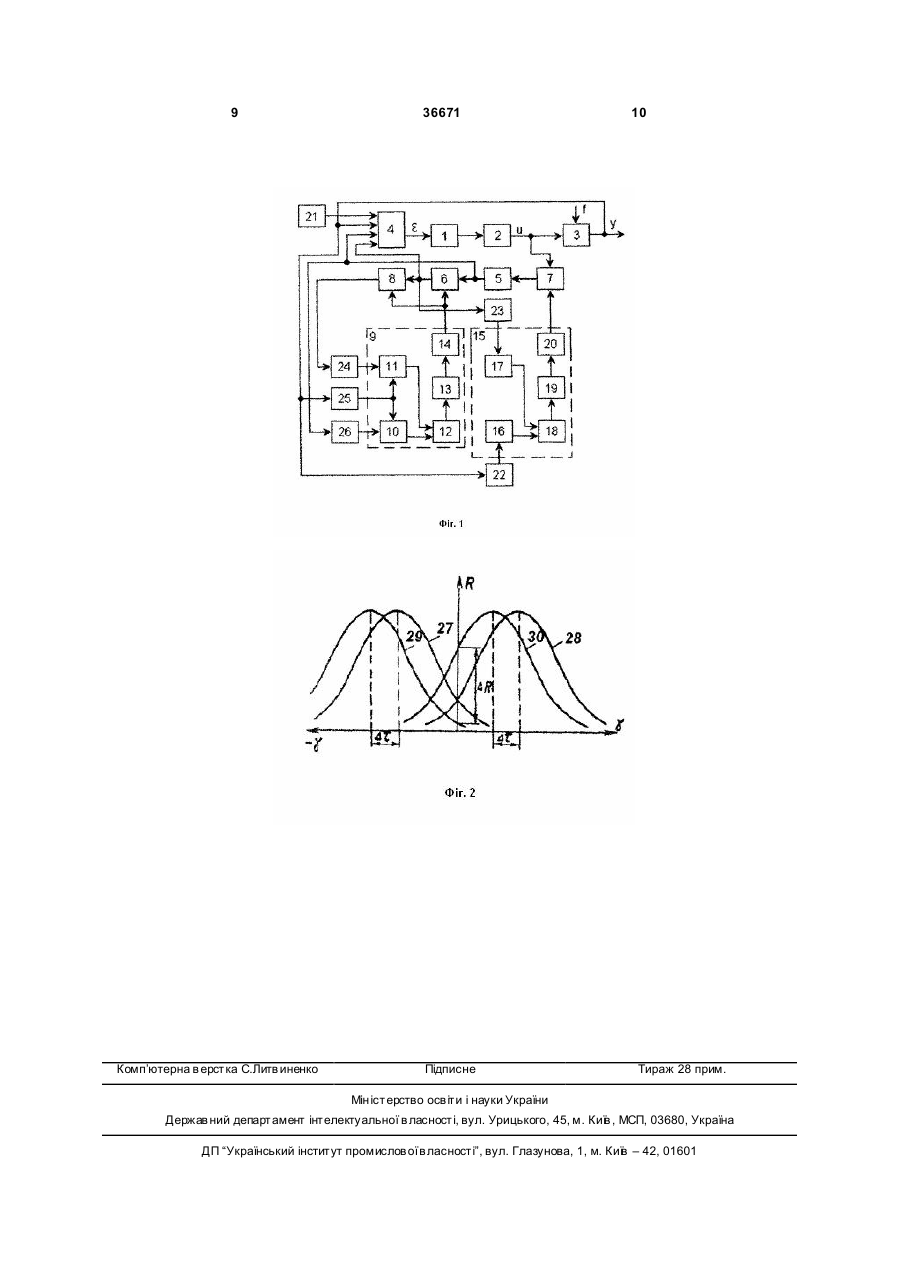
Самоналагоджувальна система, яка містить регулюючий блок, з'єднаний виходом з входом виконавчого механізму, який виходом з'єднаний з першим входом блока множення та входом об'єкта регулювання, підключеного виходом до першого входу суматора, другого входу першого блока параметричного зворотного зв'язку та другого входу другого блока параметричного зворотного зв'язку, інерційний блок, вхід якого з'єднаний з виходом 3 36671 об'єкта регулювання, яка ввімкнена до основного контуру регулювання системи. Вона складається з блока множення, інерційного блоку та першого блоку запізнення. В системі вихідний сигнал задатчика через суматор, регулюючий блок потрапляє на один з входів блока множення та через виконавчий механізм діє на об'єкт регулювання. Вихідний сигнал об'єкта потрапляє на другий вхід суматора. Вихідний сигнал блоку множення через інерційний блок потрапляє на третій вхід суматора і на інформаційний вхід першого блоку запізнення. Коефіцієнт передачі моделі змінюється шляхом подачі на другий вхід блоку множення вихідного сигналу другого блоку параметричного зворотного зв'язку, на входи якого потрапляють вихідні сигнали першого блоку запізнення та об'єкта регулювання. Час запізнення моделі змінюється за рахунок подачі на керуючі входи першого та другого блоків запізнення вихідного сигналу першого блоку параметричного зворотного зв'язку, на входи якого потрапляють вихідні сигнали другого блока запізнення, об'єкта регулювання та інерційного блоку. Причиною, що перешкоджає досягненню якісних показників регулювання є те, що відома самоналагоджувальна система не може здійснювати компенсацію впливу зміни величин коефіцієнта передачі та часу запізнення об'єкта регулювання в умовах, коли на об'єкт діють неконтрольовані збурення. Задача, на вирішення якої спрямовано корисну модель, підвищення показників якості регулювання самоналагоджувальної системи коли потрібно здійснювати компенсацію впливу зміни величин коефіцієнта передачі та часу запізнення об'єкта регулювання в умовах дії на об'єкт неконтрольованих збурень. Поставлена задача вирішується тим, що у самоналагоджувальній системі яка містить регулюючий блок, з'єднаний виходом з входом виконавчого механізму, який виходом з'єднаний з першим входом блока множення та входом об'єкта регулювання, підключеного виходом до першого входу суматора, другого входу першого блоку параметричного зворотного зв'язку та другого входу другого блоку параметричного зворотного зв'язку, інерційний блок, вхід якого з'єднаний з виходом блока множення а вихід з інформаційним входом першого блока запізнення, третім входом суматора та третім входом першого блоку параметричного зворотного зв'язку, перший блок запізнення, з'єднаний виходом з четвертим входом суматора, інформаційним входом другого блоку запізнення та першим входом другого блоку параметричного зворотного зв'язку, вихід якого з'єднаний з другим входом блоку множення, другий блок запізнення, вихід якого з'єднаний з першим входом першого блоку параметричного зворотного зв'язку, виходом з'єднаного з керуючими входами першого та другого блоків запізнення, згідно з корисною моделлю, в самоналагоджувальну систему додатково введені фільтри високих частот, крізь які проходять усі вхідні сигнали першого та друго го блоків параметричного зворотного зв'язку. Введені зміни в самоналагоджувальну систему значно зменшують вплив неконтрольованих збу 4 рень на точність розрахунків у блоках параметричного зворотного зв'язку, що дає високі показники якості регулювання самоналагоджувальної системи в умовах дії на об'єкт регулювання неконтрольованих збурень та зміни величин його коефіцієнта передачі і часу запізнення. На Фіг.1 приведена блок-схема запропонованої самоналагоджувальної системи. Самоналагоджувальна система містить регулюючий блок 1, виконавчий механізм 2, об'єкт регулювання 3, суматор 4, інерційний блок 5, перший блок запізнення 6, блок множення 7, другий блок запізнення 8, перший блок параметричного зворотного зв'язку 9, перший та другий блоки множення 10 та 11, суматор 12, інерційний блок 13, інтегратор 14, другий блок параметричного зворотного зв'язку 15, перший та другий детектори 16 та 17, суматор 18, інерційний блок 19, інтегратор 20, задатчик 21, фільтри високих частот 22-26, графіки взаємокореляційних функцій 27-30. При цьому прийняті наступні позначення: х вихідний сигнал задатчика 21; f - неконтрольоване збурення; у - ви хідний сигнал об'єкта регулювання 3; g - вихідний сигнал інерційного блоку 5; z - ви хідний сигнал першого блоку запізнення 6; q - вихідний сигнал другого блоку запізнення 8; U - керуюча дія або вихідний сигнал виконавчого механізму 2; l1, l2 - вихідні сигнали відповідно другого та першого блоків параметричного зворотного зв'язку; R - кореляційна функція; g - часовий зсув; К о, to - коефіцієнт посилення та час запізнення об'єкту регулювання 3; Км , tм - коефіцієнт посилення та час запізнення моделі; Dt, DR - зсув часу зсуву та взаємокореляційної функції. До складу першого блока парметричного зворотного зв'язку входять перший та другий блоки множення 10 та 11, суматор 12, інерційний блок 13, інтегратор 14. До складу другого блока парметричного зворотного зв'язку входять перший та другий детектори 16 та 17, суматор 18, інерційний блок 19, інтегратор 20. У якості детекторів 16 та 17 використовуються квадратичні детектори. Система працює наступним чином. На виході задатчика 21 формується сигнал завдання x(t) – у загальному випадку стаціонарний центрований випадковий процес. На виході суматора 4 формується сигнал помилки e(t), перетворюючи який регулюючий блок 1 сумісно з виконавчим механізмом 2 формує управляючу дію U(t). Управляюча дія U(t) потрапляє на вхід об'єкта регулювання 3, який описується передаточною функцією ì -1ü én ù ï ï -p to( t ) Wo ( p) = íK o ( t ) êÕ (aoi p + 1) ú ý e êi= 1 ú ï ï ë û î þ (1) де Ko(t), to(t) - коефіцієнт передачі та час запізнення об'єкта регулювання 3, аоi - коефіцієнти характеристичного рівняння об'єкта регулювання 3, р - оператор Лапласа, і на вхід моделі об'єкта з передаточною функцією 5 и з Wм( р) = Wм( р) × Wм ( р) 36671 (2) и з де Wм ( р), Wм (р ) - передаточні функції інерційної та запізнювальної частин моделі об'єкта регулювання. Модель об'єкта із змінним коефіцієнтом передачі Км (l1) і часом запізнення tм (l2) утворена послідовно з'єднаними блоком множення 7, визначаючим коефіцієнт передачі Км (l1) моделі, інерційним блоком 5 n-го порядку з передаточною функцією ì - 1ü én ù ï ï и Wм(р ) = íКм( l1)ê Õ (aмір + 1ú ý (3) êi =1 ú ï ï ë û î þ де Км (l1) - коефіцієнт передачі моделі об'єкта регулювання, амі - коефіцієнти характеристичного рівняння моделі об'єкта регулювання, 6 l1 - ви хідний сигнал другого блоку параметричного зворотного зв'язку 15, р - оператор Лапласа. Та першим блоком запізнення 6 з передаточною функцією (4) Wм(р) = е -р tм (l 2 ) де tм (l2) - час запізнення моделі об'єкта регулювання, l2 - вихідний сигнал першого блоку параметричного зворотного зв'язку 9, р - оператор Лапласа. Якщо Wо(p)=Wм (p), тобто K o(t)=Км (l 1), (5) to(t)=tм (l 2), та аоі=aмі, тоді помилка регулювання e ì -1ü én ù ï ï и e(p ) = U(p )é Wo (p) - Wм (р ) + Wм(р )ù = U(p)íKм (l1)ê Õ (a мір + 1)ú ý (6) ê ú ë û êi =1 ú ï ï ë û î þ визначається тільки властивостями інерційного блоку 5 та не залежить від запізнення в об'єкті регулювання 3. Завдяки виключенню часу запізнення tо(t) з замкненого контуру управління збільшується стійкість та якість перехідних процесів в системі. Однак, якщо параметри Ko(t) та to(t) нестаціонарні, то умова (5) у загальному випадку не виконується і вираз (6) стає невірним. Блоки параметричного зворотного зв'язку 9 та 15 призначені для настройки параметрів відповідно tм (l2) та Км (l1) при зміненні у часі параметрів Кo(t) та to(t). Принцип роботи першого блоку параметричного зворотного зв'язку пояснюється графіками, котрі приведені на Фіг.2. Так як x(t) - стаціонарний центрований випадковий сигнал, то і y(t), g(t), q(t) ви хідні сигнали об'єкта регулювання 3, інерційного блоку 5 та другого блоку запізнення 8 також стаціонарні центровані випадкові сигнали із взаємокореляційними функціями Ryg (g)=M[y(t)g(t-g)] (7) Ryq (g)=M[y(t)q(t-g)] (8) де М - символ операції математичного очікування, g - часовий зсув. Якщо передаточна функція інерційного блоку 5 відповідає передаточній функції інерційної частини об'єкта регулювання 3, то графіки функцій Ryg (g) та Ryq (g) мають вид симетричних кривих, максимуми яких мають координати відповідно Argmax[R yg (g)]=t o(t); gÎ(-¥;¥) argmax[Ryq (g)]=2tм (l2)-to(t); gÎ(-¥;¥) та при to(t)=tм (l2) рівновіддалені від точки g=0. Графіки функцій Ryg (g) та Ryq (g) при to(t)=tм (l2) мають вид кривих відповідно 27 та 28 на Фіг.2. При g=0, Ryg (g)-Ryq (g)=0. Якщо to(t) зміниться (наприклад, збільшиться) на Dt, то максимуми функцій Ryg (g) та Ryq (g) відповідно змістяться на Dt і функції Ryg та Ryq будуть мати вигляд кривих відповідно 29 та 30 на Фіг.2, тобто у точці g=0 значення функцій відрізняються один від одного на величину DR[to(t)-tм (l2)]=Ryg (g)-Ryq (g) (9) Отже, величина DR характеризує відхилення часу запізнення tм (l2) моделі об'єкта регулювання від часу запізнення to(t) об'єкта регулювання 3 і може бути використана для настройки часу запізнення tм (l2) моделі об'єкта регулювання при зміненні часу запізнення to(t) об'єкта регулювання 3. Перший блок параметричного зворотного зв'язку 9 працює наступним чином. Перший та другий блоки множення 10 та 11 розраховують відповідно добутки сигналів y(t)g(t) та y(t)q(t), котрі були пропущені крізь фільтри високих частот 24, 25 та 26 відповідно. Так як сигнали y(t), g(t), q(t) - стаціонарні, то DR=M[y(t)g(t)]-M[y(t)q(t)]=M[y(t)g(t)-y(t)q(t)] (10) Різниця y(t)g(t) - y(t)q(t) формується на виході суматора 12, а оцінка математичного очікування на інтервалі усереднювання Т13 розраховується інерційним блоком 13 з передаточною функцією W13 (p) = 1 T13p + 1 де Т13 - стала часу інерційного блоку 13. Величина Т13 вибирається у діапазоні Т13=(5... 10)/wс, де wс - частота зрізу системи. Розрахована на виході інерційного блоку оцінка сигналу DR інтегрується інтегратором 14. Сигнал l2 з виходу інтегратора 14 потрапляє на управляючі входи блоків запізнення 6 та 8. Запізнення tм (l2) змінюється до тих пір, поки сигнал DR не дорівнюватиме нулю. При цьому згідно (7), (8) та Фіг.2 tм (l 2)=t o(t). Для настройки коефіцієнта передачі Км (l1), при зміненні коефіцієнта передачі Kо(t) об'єкта регулювання 3, призначений другий блок параметричного 7 36671 зворотного зв'язку 15, який працює наступним чином. Сигнал y(t) з виходу об'єкта регулювання 3 та сигнал z(t) з виходу першого блока запізнення 6 проходять крізь фільтри високих частот 22 та 23 відповідно та зводяться до квадрату квадратичними детекторами 16 та 17. Вихідні сигнали детекторів 16 та 17 потрапляють на входи суматора 18, який розраховує їх різницю. Вихідний сигнал суматора 18 потрапляє на вхід інерційного блоку 19 з передаточною функцією W19 (p ) = 1 T p +1 19 де Т19 - стала часу інерційного блоку 19. На виході інерційного блоку 19 формується сигнал DD різниці дисперсій сигналів y(t) та z(t) у відповідності з виразом Dy=M[y2(t)], D z=M[z2(t)] (11) DD=Dy-Dz=M[у2(t)]-M[z2(t)]=M[у2(t)-z2(t)] (12) Оцінка математичного очікування розраховується інерційним блоком 19 на інтервалі усереднювання Т19, котрий вибирається у діапазоні Т19=(5...10)/wс, де wс - частота зрізу системи. Сигнал DD пропорційний різниці коефіцієнтів передачі об'єкта регулювання 3 та його моделі Кo(t) - Км (l1), що слідує з наступних виразів: 1 DD = D y - Dz = (K 2 - K 2 ) o м p Сигнал DD інтегрується інтегратором 20 та діючи на другий вхід блока множення 7, змінює коефіцієнт передачі моделі об'єкта регулювання до тих пір, поки сигнал DD не дорівнюватиме нулю. При цьому у відповідності з (12) та (17) Км (l1)=Kо(t). Сталі часу інтегр ування інтеграторів 14 та 20 визначають швидкість настройки часу запізнення tм та коефіцієнту передачі Км моделі об'єкта регулювання. З міркувань стійкості процесу настройки коефіцієнта Км моделі об'єкта регулювання сталу часу Т20 інтегратора 20 слід обирати із умови T20 = (4 - 5))o , де )o оцінка середнього знаt t чення часу запізнення tо об'єкта регулювання 3. Оцінку )o можна прийняти рівною максимально t можливому значенню tо мах з усього діапазону вимірювання часу запізнення to(t) об'єкта регулювання 3. 8 Dy = Dz = 1 p 1 p ¥ ò Wo ( jw) 0 ¥ 2 ò Wм( j w) Sи (w)dw (13) 2 (14) S и (w)dw 0 де Wo(jw), Wм (jw) - передаточні функції об'єкта регулювання 3 та його моделі в частотній області; Sи(w) - функція спектральної густини управляючої дії U(t). Так як статичні коефіцієнти передачі Ко, Км не залежать від частоти w, а чисте запізнення в блоці запізнення 6 не впливає на величину дисперсії сигналу на його виході, то вираз (13), (14) можна переписати у вигляді -2 -1 ¥ ù 1 én (15) Dy = K2 ò ê Õ (aoір + 1ú Sи (w)dw o p ê ú û 0 ë i =1 2 1 Dz = Kм p -1 ¥é n ù ê Õ (aмір + 1ú òê ú 0 ëi =1 û -2 Sи (w)d w (16) тобто при аоі=амі будемо мати -1 ¥é n ù ò êÕ (aір + 1ú ê ú û 0 ëi =1 -2 Sи (w)dw (17) Величина сигналу DD (див.17) впливає на процес настройки часу запізнення tм моделі об'єкта регулювання. При DD¹0, оцінка DR (див.10) залежить не тільки від різниці tо(t)-tм (l2), але й від величини оцінки сигналу DD. Один із можливих шляхів зменшення цього впливу полягає в виборі сталої часу Т 14 інтегратора 14 по величині у 3-5 разів більшої величини сталої часу Т20 інтегратора 20. При цьому процес настройки коефіцієнта передачі Км моделі об'єкта регулювання закінчується раніше процесу настройки часу запізнення tм моделі об'єкта регулювання і не впливає на нього. Дана система була досліджена шляхом моделювання на ЕВМ. Результати моделювання показують достатньо високі швидкодію та точність процесів настройки Км (l1) та tм (l2), наслідком чого є висока якість управління, яке забезпечує система при змінних у часі Ko(t) та to(t) та при дії на об'єкт регулювання 3 неконтрольованого збурення f. 9 Комп’ютерна в ерстка C.Литв иненко 36671 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-adjustment system
Автори англійськоюKhobin Viktor Andriiovych, Marchuk Oleksandr Anatoliiovych
Назва патенту російськоюСамонастраивающаяся система
Автори російськоюХобин Виктор Андреевич, Марчук Александр Анатольевич
МПК / Мітки
МПК: G05B 13/02
Мітки: система, самоналагоджувальна
Код посилання
<a href="https://ua.patents.su/5-36671-samonalagodzhuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Самоналагоджувальна система</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: система, літального, безпілотного, стабілізації, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Симонов Володимир Федорович, Литвиненко Денис Володимирович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: стабілізації, безпілотного, система, літального, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система формування команди проекту з функціональним резервуванням
Номер патенту: 31044
Опубліковано: 25.03.2008
Автори: Доценко Наталія Володимирівна, Шипулін Олексій Ігорович, Дідик Наталія Олексіївна, Чумаченко Ігор Володимирович
МПК: G06F 17/00
Мітки: резервуванням, формування, команди, система, функціональним, проекту
Формула / Реферат:
Система формування команди проекту з функціональним резервуванням, яка має групу інформаційних входів, порогові елементи, керуючий вхід, два виходи пристрою, виходи результату, двійковий лічильник, блок пам'яті, k блоків множення векторів, елементи І, елемент Ш, керуючий вхід, виходи блока пам'яті, тригер, причому виходи першого двійкового лічильника з'єднані з входами першого блока пам'яті, виходи якого з'єднані з виходами результату та...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, літального, стабілізації, система, адаптивна, апарата, кутової
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Система управління процесом технічної експлуатації
Номер патенту: 73458
Опубліковано: 15.07.2005
Автори: Волошин Ігор Іванович, Блаженний Валерій Іванович, Семон Богдан Йосипович, Пустовий Сергій Олексійович
МПК: G05B 13/00
Мітки: управління, технічної, система, експлуатації, процесом
Формула / Реферат:
Система управління процесом технічної експлуатації, що містить блок формування мети процесу технічної експлуатації, блок управління законом першого каналу, блок управління законом другого каналу, блок закону управління першого каналу, блок закону управління другого каналу, пристрій управління першого каналу, пристрій управління другого каналу, блок зовнішніх факторів, блок процесу технічної експлуатації і об'єкт експлуатації, яка...
Попередній патент: Спосіб автоматичного керування процесом копчення ковбаси у коптильній камері
Наступний патент: Спосіб доставки та зберігання питної артезіанської води
Випадковий патент: Пристрій для сортування чисел