Цифрова система управління наведенням рухомого об’єкта
Номер патенту: 10677
Опубліковано: 25.12.1996
Формула / Реферат
Цифровая система управления наведением подвижного объекта, включающая подвижный объект, вход которого соединен с выходом объекта наведения, а выход подключен ко входу измерителя параметра наведения, отличающаяся тем, что она содержит интегрирующий аналого-цифровой преобразователь, N ячеек постоянного запоминающего устройства, N вычислительных ячеек, соединенных последовательно, и сумматор, причем выход измерителя параметра наведения соединен со входом интегрирующего аналогово-цифрового преобразователя, выход которого соединен со входом первой вычислительной ячейки, второй вход каждой вычислительной ячейки соединен с выходом соответствующей ячейки постоянного запоминающего устройства, а второй выход каждой из вычислительных ячеек соединен с соответствующим входом сумматора, выход которого подключен ко входу подвижного объекта.
Текст
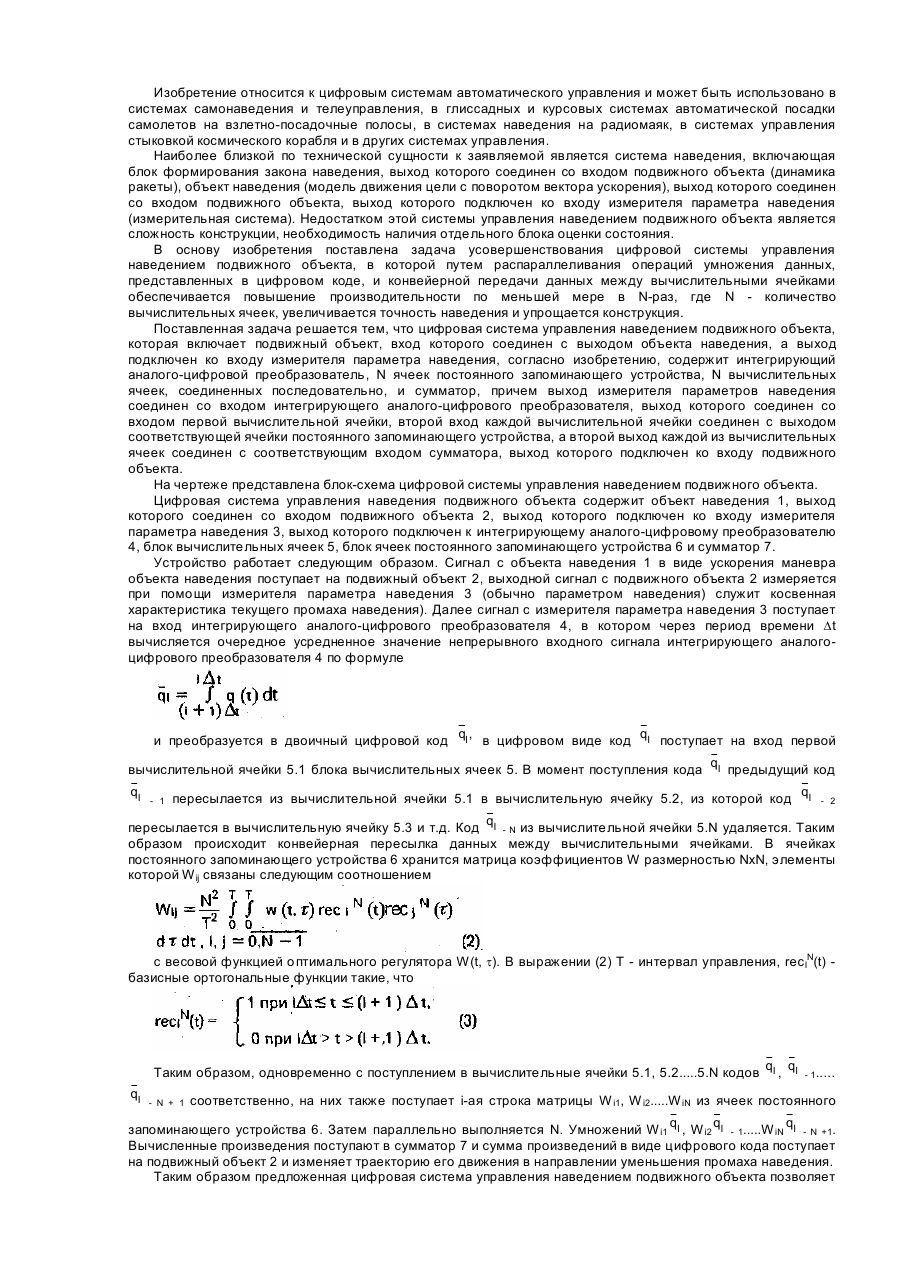
Изобретение относится к цифровым системам автоматического управления и может быть использовано в системах самонаведения и телеуправления, в глиссадных и курсовых системах автоматической посадки самолетов на взлетно-посадочные полосы, в системах наведения на радиомаяк, в системах управления стыковкой космического корабля и в других системах управления. Наиболее близкой по технической сущности к заявляемой является система наведения, включающая блок формирования закона наведения, выход которого соединен со входом подвижного объекта (динамика ракеты), объект наведения (модель движения цели с поворотом вектора ускорения), выход которого соединен со входом подвижного объекта, выход которого подключен ко входу измерителя параметра наведения (измерительная система). Недостатком этой системы управления наведением подвижного объекта является сложность конструкции, необходимость наличия отдельного блока оценки состояния. В основу изобретения поставлена задача усовершенствования цифровой системы управления наведением подвижного объекта, в которой путем распараллеливания операций умножения данных, представленных в цифровом коде, и конвейерной передачи данных между вычислительными ячейками обеспечивается повышение производительности по меньшей мере в N-раз, где N - количество вычислительных ячеек, увеличивается точность наведения и упрощается конструкция. Поставленная задача решается тем, что цифровая система управления наведением подвижного объекта, которая включает подвижный объект, вход которого соединен с выходом объекта наведения, а выход подключен ко входу измерителя параметра наведения, согласно изобретению, содержит интегрирующий аналого-цифровой преобразователь, N ячеек постоянного запоминающего устройства, N вычислительных ячеек, соединенных последовательно, и сумматор, причем выход измерителя параметров наведения соединен со входом интегрирующего аналого-цифрового преобразователя, выход которого соединен со входом первой вычислительной ячейки, второй вход каждой вычислительной ячейки соединен с выходом соответствующей ячейки постоянного запоминающего устройства, а второй выход каждой из вычислительных ячеек соединен с соответствующим входом сумматора, выход которого подключен ко входу подвижного объекта. На чертеже представлена блок-схема цифровой системы управления наведением подвижного объекта. Цифровая система управления наведения подвижного объекта содержит объект наведения 1, выход которого соединен со входом подвижного объекта 2, выход которого подключен ко входу измерителя параметра наведения 3, выход которого подключен к интегрирующему аналого-цифровому преобразователю 4, блок вычислительных ячеек 5, блок ячеек постоянного запоминающего устройства 6 и сумматор 7. Устройство работает следующим образом. Сигнал с объекта наведения 1 в виде ускорения маневра объекта наведения поступает на подвижный объект 2, выходной сигнал с подвижного объекта 2 измеряется при помощи измерителя параметра наведения 3 (обычно параметром наведения) служит косвенная характеристика текущего промаха наведения). Далее сигнал с измерителя параметра наведения 3 поступает на вход интегрирующего аналого-цифрового преобразователя 4, в котором через период времени Dt вычисляется очередное усредненное значение непрерывного входного сигнала интегрирующего аналогоцифрового преобразователя 4 по формуле и преобразуется в двоичный цифровой код qI , в цифровом виде код qI поступает на вход первой вычислительной ячейки 5.1 блока вычислительных ячеек 5. В момент поступления кода qI предыдущий код qI - 1 пересылается из вычислительной ячейки 5.1 в вычислительную ячейку 5.2, из которой код qI - 2 пересылается в вычислительную ячейку 5.3 и т.д. Код qI - N из вычислительной ячейки 5.N удаляется. Таким образом происходит конвейерная пересылка данных между вычислительными ячейками. В ячейках постоянного запоминающего устройства 6 хранится матрица коэффициентов W размерностью NxN, элементы которой W ij связаны следующим соотношением с весовой функцией оптимального регулятора W(t, t). В выражении (2) Т - интервал управления, recIN(t) базисные ортогональные функции такие, что Таким образом, одновременно с поступлением в вычислительные ячейки 5.1, 5.2.....5.N кодов qI , qI qI - N + 1 - 1..... соответственно, на них также поступает і-ая строка матрицы W i1, W i2.....W iN из ячеек постоянного запоминающего устройства 6. Затем параллельно выполняется N. Умножений W i1 qI , W i2 qI - 1.....W iN qI - N +1. Вычисленные произведения поступают в сумматор 7 и сумма произведений в виде цифрового кода поступает на подвижный объект 2 и изменяет траекторию его движения в направлении уменьшения промаха наведения. Таким образом предложенная цифровая система управления наведением подвижного объекта позволяет упростить конструкцию, повысить точность наведения, дает возможность реконфигурировать структуру управления для различных задач путем изменения матрицы W, сочетает в себе как функции управляющего устройства, так и фильтра для выделения полезного сигнала на фоне помех, позволяет уменьшить габариты и за счет параллельной обработки и конвейерной пересылки данных увеличить производительность.
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital guidance control system for movable object
Автори англійськоюTunik Anatolii Azariiovych, Sokol Serhii Oleksiiovych
Назва патенту російськоюЦифровая система управления наведения подвижного объекта
Автори російськоюТуник Анатолий Азарьевич, Сокол Сергей Алексеевич
МПК / Мітки
МПК: G05B 11/00
Мітки: система, наведенням, управління, цифрова, рухомого, об'єкта
Код посилання
<a href="https://ua.patents.su/2-10677-cifrova-sistema-upravlinnya-navedennyam-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Цифрова система управління наведенням рухомого об’єкта</a>
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Сидоренко Іван Тимофійович, Кривущенко Микола Тимофійович, Дубінін Сергій Васильович, Мальцев Леонід Єгорович, Гринь Костянтин Афанасійович
МПК: E21C 35/24
Мітки: муфти, управління, тиристорний, пристрій, електромагнітної, гірничої, захисту, машини, привода
Формула / Реферат:
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Цифрова комутаційна система
Номер патенту: 5341
Опубліковано: 28.12.1994
Автори: Абугов Гелій Петрович, Бєляк Володимир Бенціанович, Поляк Марк Урієвич
МПК: H04M 3/00
Мітки: цифрова, комутаційна, система
Формула / Реферат:
1. Цифровая коммутационная система, содержащая модуль транзитной коммутации, l модулей абонентской концентрации, l•m удаленных абонентских модулей, l•m•n телефонных аппаратов, каждый из которых через соответствующий удаленный абонентский модуль соединен с соответствующим из m входов-выходов модуля абонентской концентрации, другие входы-выходы которого соединены с соответствующими входами-выходами модуля транзитной коммутации, другие р...
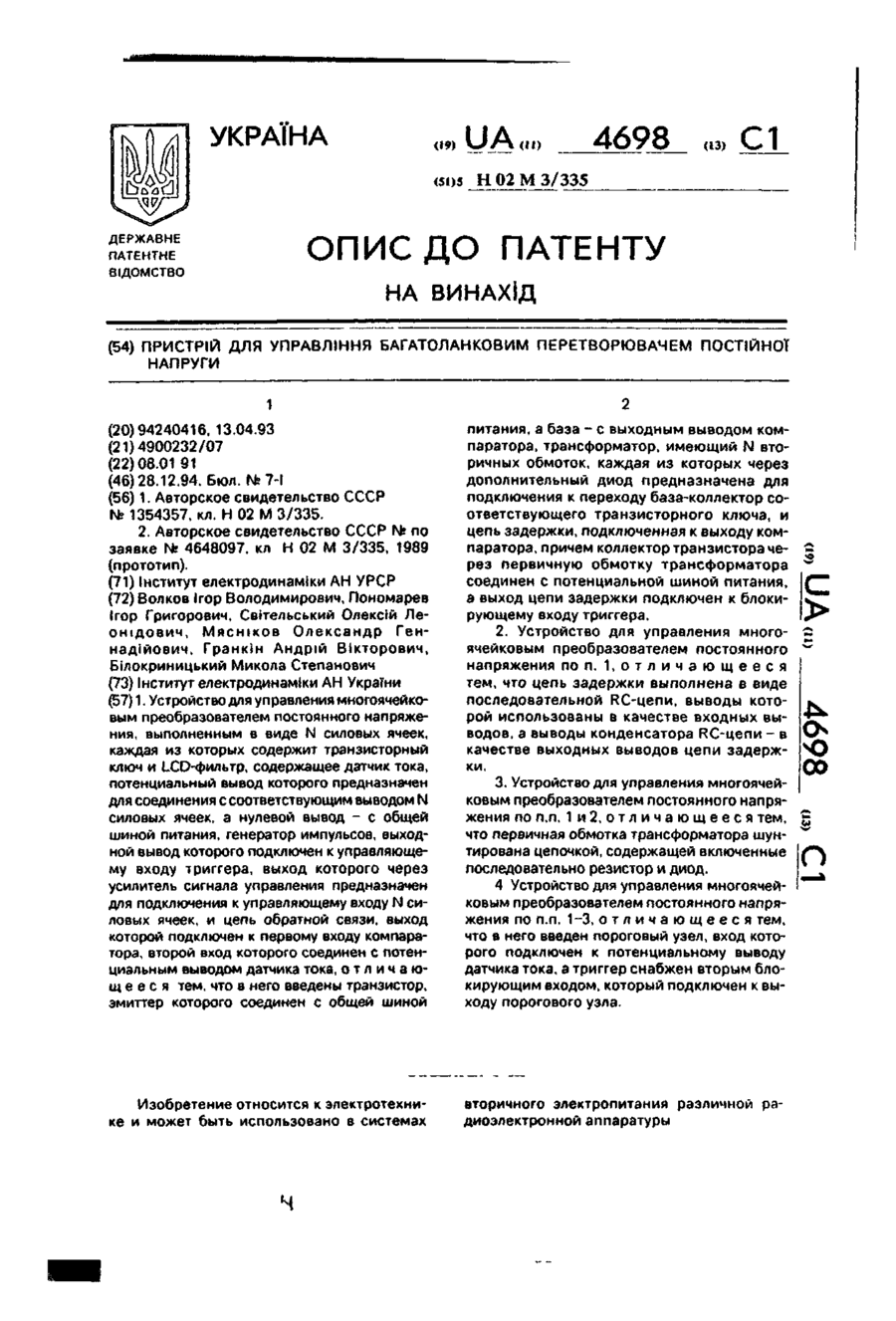
Пристрій для управління багатоланковим перетворювачем постійної напруги
Номер патенту: 4698
Опубліковано: 28.12.1994
Автори: Світельський Олексій Леонідович, Пономарев Ігор Григорович, Волков Ігор Володимирович, Мясніков Олександр Геннадійович, Білокриницький Микола Степанович, Гранкін Андрій Вікторович
МПК: H02M 3/335
Мітки: багатоланковим, пристрій, напруги, управління, постійної, перетворювачем
Формула / Реферат:
(57) 1. Устройство для управления многоячейковым преобразователем постоянного напряжения, выполненным в виде N силовых ячеек, каждая из которых содержит транзисторный ключ и LCD-фильтр, содержащее датчик тока, потенциальный вывод которого предназначен для соединения с соответствующим выводом N силовых ячеек, а нулевой вывод - с общей шиной питания, генератор импульсов, выходной вывод которого подключен к управляющему входу триггера, выход...
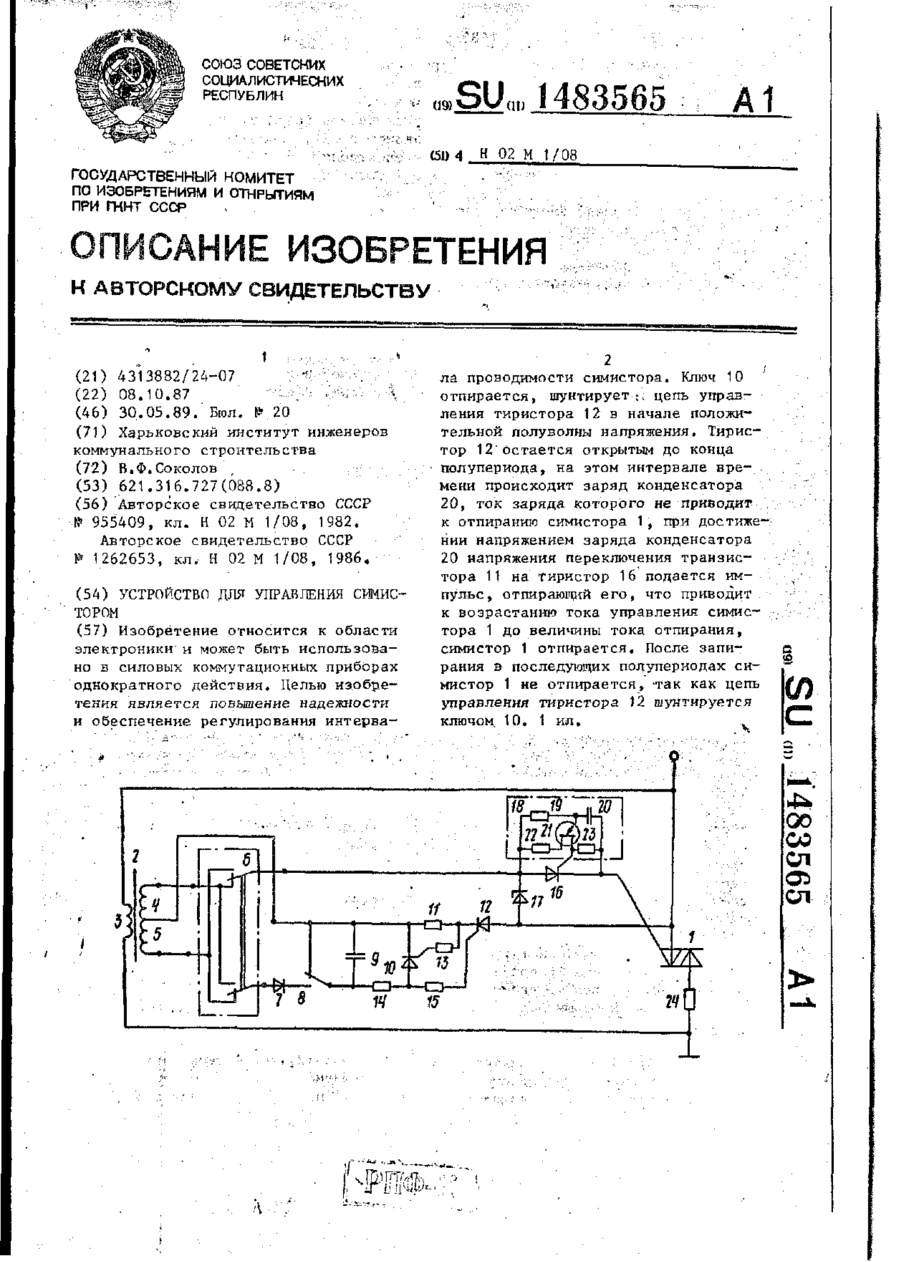
Пристрій для управління симістором
Номер патенту: 1081
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: H02M 1/08
Мітки: управління, пристрій, симістором
Формула / Реферат:
Устройство для управления симистором, содержащее пусковой диод, трансформатор, первичная обмотка которого подключена к сети переменного тока, крайние выводы вторичной обмотки соединены с входами переключателя полярности, имеющего два выхода, средняя точка вторичной обмотки подключена к отрицательной обкладке накопительного конденсатора, соединенной с выходом вспомогательного ключа, выход которого подключен к точке соединения первого и второго...
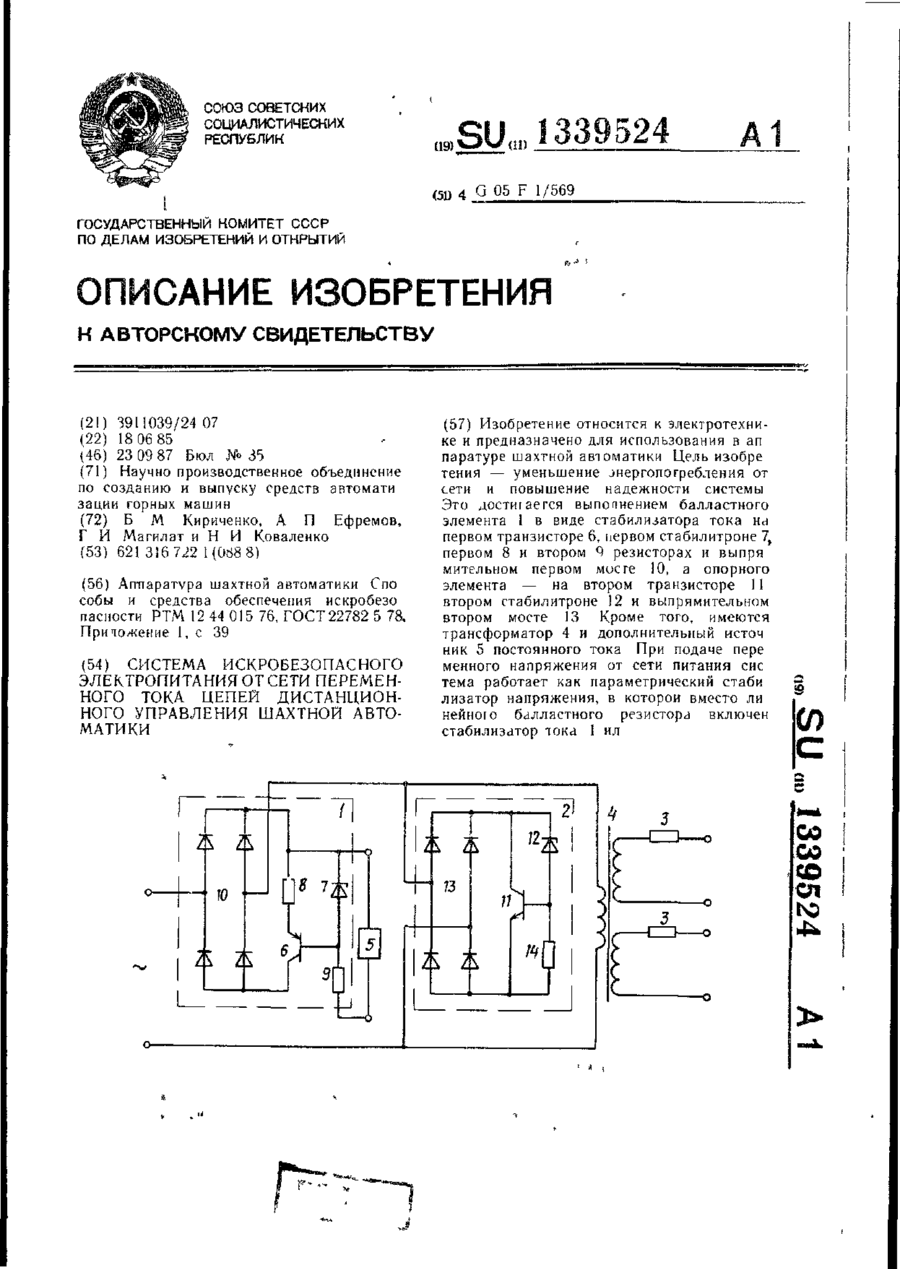
Система іскробезпечного електроживлення від мережі змінного струму схем дистанційного управління шахтної автоматики
Номер патенту: 7595
Опубліковано: 29.09.1995
Автори: Кириченко Борис Мефодієвич, Коваленко Наталія Іванівна, Єфремов Олександр Петрович, Магілат Генадій Йосипович
МПК: G05F 1/569
Мітки: струму, автоматики, мережі, дистанційного, система, змінного, електроживлення, іскробезпечного, схем, шахтної, управління
Формула / Реферат:
Система искробезопасного электропитания от сети переменного тока цепей дистанционного управления шахтной автоматики, содержащая параметрический стабилизатор на балластном и опорном элементах и токсюграничивающие резисторы, отличающаяся тем, что, с целью уменьшения энергопотребления от сети и повышения надежности системы, в нее введены трансформатор и дополнительный источник постоянного тока, балластный элемент выполнен в виде стабилизатора...
Попередній патент: Кантувач довгомірних вантажів
Наступний патент: Пристрій для реєстрації аероіонів у видихуваному повітрі
Випадковий патент: Пристрій для хімічного розчинення фосфогіпсу у пульсуючому потоці аміачно-фосфогіпсової суспензії