Спосіб контролю положення виконавчого органа гірничої машини відносно межі “вугілля-порода” і пристрій для його здійснення
Номер патенту: 48110
Опубліковано: 15.08.2002
Автори: Гулевський Юрій Володимирович, Манжула Іван Трохимович, Пічко Федір Данилович, Галухін Микола Олександрович, Соболь Валентин Миколайович, Манжула Сергій Іванович, Єрмак Анатолій Акимович, Тернюк Микола Еммануілович, Федоренко Олександр Дмитрович
Формула / Реферат
1. Способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода", при котором определяют величину давления в штоковой полости гидродомкрата управления исполнительным органом горной машины в вертикальной плоскости, отличающийся тем, что давление в штоковой полости гидродомкрата управления исполнительным органом определяют при неподвижном исполнительном органе путем нагружения индентора, а максимальное давление питания штоковой полости устанавливают в пределах, больших чем давление разрушения угля и меньших - породы, выделяют участки снижения давления, по которым судят о положении исполнительного органа в пределах угольного пласта, при этом при отсутствии участков снижения давления на кривой нагружения производят корректировку движущегося исполнительного органа.
2. Устройство для контроля положения исполнительного органа горной машины относительно границы "уголь-порода", включающее гидродомкрат управления исполнительным органом горной машины в вертикальной плоскости, расположенный в гидромагистрали и связанный со штоковой полостью гидродомкрата датчик давления, выход которого соединен с электронным блоком, отличающееся тем, что штоковая полость гидродомкрата гидравлически связана через выполненные в штоке каналы с образованной в штоке полостью, в которой расположен подпружиненный аксиально подвижный плунжер, на торцовой поверхности которого расположен индентор, а выход датчика давления соединен с одним из входов трех компараторов и с входом пикового детектора, который соединен с одним из выходов дешифратора, входы которого соединены с выходами первого и второго компараторов, а второй выход дешифратора последовательно соединен через ключ и первый триггер с индикатором породы, при этом выход пикового детектора соединен со вторым входом третьего компаратора, выход которого соединен через второй триггер с индикатором угля и с блокировочным входом ключа, а вторые входы первою и второго компараторов соединены с первым и вторым источниками опорного напряжения соответственно.
Текст
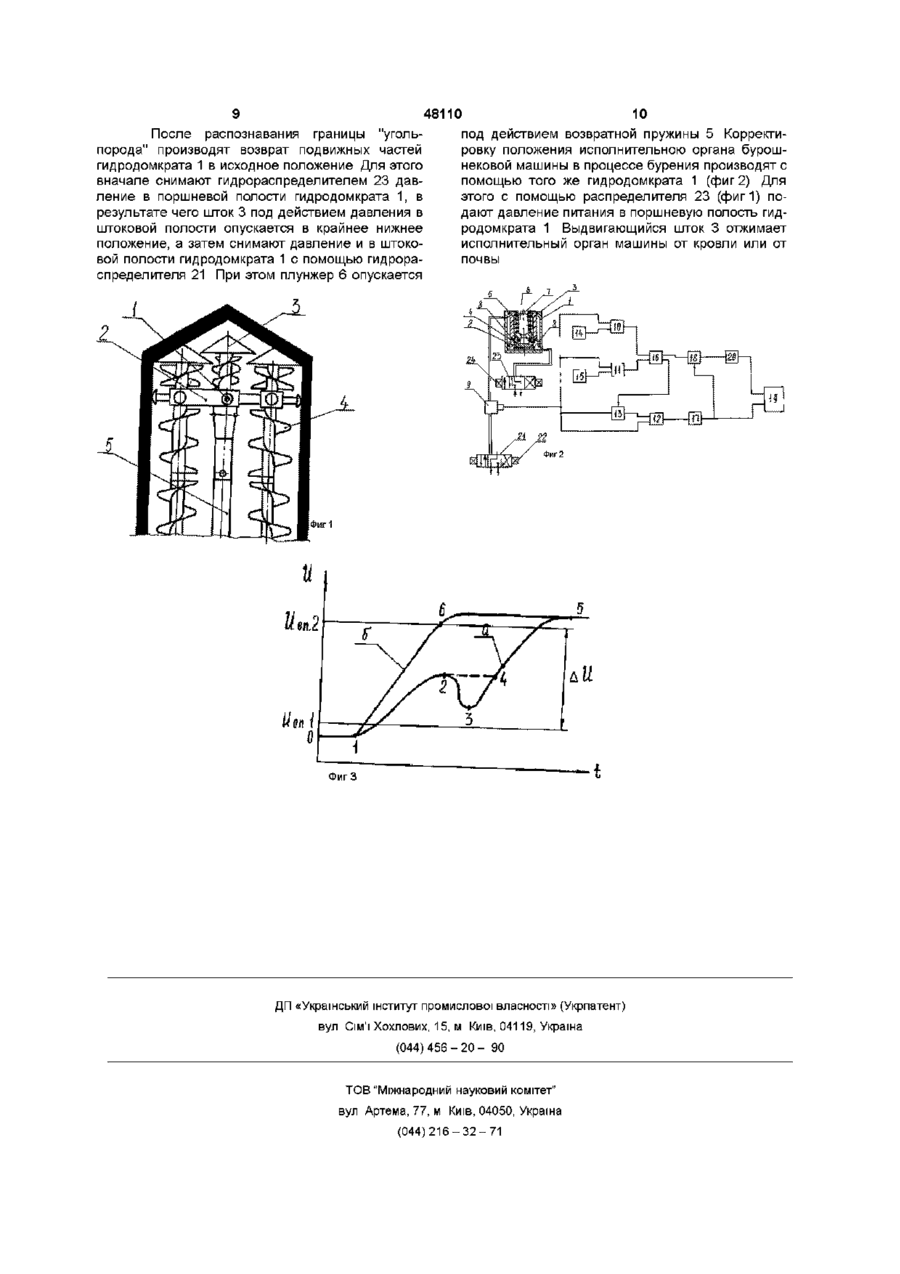
1 Способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода", при котором определяют величину давления в штоковой полости гидродомкрата управления исполнительным органом горной машины в вертикальной плоскости, отличающийся тем, что давление в штоковой полости гидродомкрата управления исполнительным органом определяют при неподвижном исполнительном органе путем нагружения индентора, а максимальное давление питания штоковой полости устанавливают в пределах, больших чем давление разрушения угля и меньших - породы, выделяют участ ки снижения давления, по которым судят о положении исполнительного органа в пределах угольного пласта, при этом при отсутствии участков снижения давления на кривой нагружения производят корректировку движущегося исполнительного органа 2 Устройство для контроля положения исполнительного органа горной машины относительно границы "уголь-порода", включающее гидродомкрат управления исполнительным органом горной машины в вертикальной плоскости, расположенный в гидромагистрали и связанный со штоковой полостью гидродомкрата датчик давления, выход которого соединен с электронным блоком, отличающееся тем, что штоковая полость гидродомкрата гидравлически связана через выполненные в штоке каналы с образованной в штоке полостью, в которой расположен подпружиненный аксиально подвижный плунжер, на торцовой поверхности которого расположен индентор, а выход датчика давления соединен с одним из входов трех компараторов и с входом пикового детектора, который соединен с одним из выходов дешифратора, входы которого соединены с выходами первого и второго компараторов, а второй выход дешифратора последовательно соединен через ключ и первый триггер с индикатором породы, при этом выход пикового детектора соединен со вторым входом третьего компаратора, выход которого соединен через второй триггер с индикатором угля и с блокировочным входом ключа, а вторые входы первою и второго компараторов соединены с первым и вторым источниками опорного напряжения соответственно Изобретение относится к автоматизации горного производства и может быть использовано для контроля положения исполнительного органа горной машины относительно границы "угольпорода" Известен способ контроля положения исполнительного органа горной машины относительно границы уголь-порода , основанный на различии прочностных характеристик угля и породы, при котором определяют усилие подачи измерительного резца по углю и породе, пропорциональное контактной прочности горной породы, по которому судят о расположении исполнительного органа, при этом меньшее значение усилия подачи изме q О 00 48110 рительного резца соответствует нахождению исполнительного органа в пределах угольного пласта, а большее значение усилия подачи измерительного резца - в боковых породах [1] Недостаток известного способа заключается в ненадежности съема и передачи информации с подвижного и непрерывно контактирующего с горной породой измерительного резца ввиду его частых поломок Известно устройство для его осуществления включающее гидродомкраты, снабженные измерительными резцами, поршневые полости которых гидравлически соединены со штоковой и поршневой полостями гидрозолотников, штоки которых снабжены чувствительными элементами, а давление питания подведено к поршневым полостям гидрозолотников и через обратные клапаны к штоковым полостям [2] Недостаток известного устройства заключается в ненадежности узла крепления гидродомкрата с измерительным резцом Из известных решений наиболее близким по технической сущности и достигаемому результату является способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода" основанный на различии прочностных характеристик угля и породы, при котором измеряют значение давлений в поршневой и штоковой полостях гидродомкрата управления исполнительным органом в вертикальной плоскости, определяют взаимную корреляционную функцию измеренных значений за определенный промежуток времени и по ее значению определяют положение исполнительного органа, при этом значение корреляционной функции в области единицы соответствует положению исполнительного органа в пределах угольного пласта, а в области нуля - в пределах боковых пород [3] Однако указанный способ имеет низкую надежность ввиду вероятностной природы корреляционной функции и отсутствия обоснованности в выборе порогового значения корреляционной функции для разграничения угля и породы Кроме того, при значении корреляционной функции близком к 0,5 становится невозможным распознавание границы угля с породой Наиболее близким по технической сущности к предлагаемому устройству является устройство для контроля положения исполнительного органа горной машины относительно границы "угольпорода" содержащее датчики давления установленные в гидромагистралях поршневой и штоковой полостей гидродомкратов управления с исполнительным органом в вертикальной плоскости, электронный блок, выполненный в виде коррелятора, генератор тактовых импульсов и узел задания временного интервала, два входа которого соединены с датчиком давления, один - с выходом генератора тактовых импульсов, а один из выходов - со входом коррелятора, выход которого соединен со входом генератора тактовых импульсов [3] Указанное устройство обладает низкой точностью контроля границы "уголь-порода" ввиду необоснованности выбора порогового значения корреляционной функции, необходимой для достоверного разграничения угля и породы, а также в связи с неопределенностью, возникающей при выходном сигнале коррелятора, равном 0,5 В основу изобретения поставлена задача создания способа контроля положения исполнительного органа горной машины относительно границы "уголь-порода" и устройства для его реализации В предложенном способе давление в штоковой полости гидродомкрата управления исполнительным органом определяют при неподвижном исполнительном органе путем нагружения индентора, а максимальное давление питания штоковой полости устанавливают в пределах больших, чем давление разрушения угля и меньших - породы, выделяют участки снижения давления по которым судят о положении исполнительного органа в пределах угольного пласта, при этом при отсутствии участков снижения давления на кривой нагружения производят корректировку движущегося исполнительного органа, благодаря этому обеспечивается технический результат, заключающийся в повышении надежности распознавания границы "уголь-порода" по сравнению с прототипом Это достигается за счет того, что во-первых, в предложенном способе измерение давления, нагружения индентора происходит, в отличии от прототипа, при неподвижном исполнительном органе, что исключает влияние динамики на результаты измерения и, во-вторых - за счет использования для распознавания статической характеристики нагружения индентора в отличие от вероятностной корреляционной функции с необоснованными порогами различия Повышение надежности контроля границы "уголь-порода" обеспечивает также уменьшение зольности добываемого угля В основу изобретения поставлена задача создания устройства для реализации предложенного способа органа горной машины относительно границы "уголь-порода", в котором штоковая полость гидродомкрата гидравлически связана через выполненные в штоке каналы с образованной в штоке полостью, в которой расположен подпружиненный аксиально подвижный плунжер на торцовой поверхности которого расположен индентор, а выход датчика давления соединен с одним из входов трех компараторов и с входом пикового детектора, который соединен с одним из выходов дешифратора, входы которого соединены с выходами первого и второго компараторов, а второй выход дешифратора последовательно соединен через ключ и первый триггер с индикатором, при этом выход пикового детектора соединен со вторым входом третьего компаратора, выход которого соединен через второй триггер с индикатором и с блокировочным входом ключа, а вторые входы первою и второго компараторов соединены с первым и вторым источниками опорного напряжения соответственно В устройстве обеспечивается технический результат, связанный с высокой точностью контроля границы "уголь-порода" ввиду повышенной надежности способа, реализуемого этим устройством За счет этого предотвращается обработка боковых пород рабочими резцами, что повышает срок службы породоразрушающего инструмента и понижает зольность добываемого угля 48110 Поставленная задача для реализации способа решается тем, что в известном способе контроля положения исполнительного органа горной машины относительно границы "уголь-порода", основанном на различии прочностных характеристик угля и породы согласно изобретению, давление в штоковой полости гидродомкрата управления исполнительного органа определяют при неподвижном исполнительном органе путем нагружения индентора, а максимальное давление питания поршневой полости устанавливают в пределах, больших чем давление разрушения угля и меньших - породы, выделяют участки снижения давления по которым судят о положении исполнительного органа в пределах угольного пласта, при этом при отсутствии участков снижения давления на кривой нагружения производят корректировку /движущегося исполнительного органа Благодаря указанному, технический результат обеспечивается путем повышения надежности распознавания границы "уголь-порода" за счет, во-первых, измерения давления нагружения индентора при неподвижном исполнительном органе, что исключает влияние динамики на результаты измерения, и во-вторых, за счет использования для разграничения границы "уголь-порода" участков снижения давления на статической кривой давления нагружения индентора, что исключает вероятностный характер распознавания границы "уголь-порода" Поставленная задача для устройства, реализующего указанный способ решается тем, что в известном устройстве для контроля положения исполнительного органа горной машины относительно границы "уголь-порода", включающем гидродомкрат управления исполнительного органа горной машины в вертикальной плоскости, расположенный в гидромагистрали, связанной со штоковой полостью гидродомкрата, датчик давления, выход которого соединен с электронным блоком согласно изобретению, штоковая полость гидродомкрата гидравлически связана через выполненные в штоке каналы с образованной в штоке полостью, в которой расположен подпружиненный аксиально подвижный плунжер, на торцовой поверхности которого расположен индентор, а выход датчика давления соединен с одним из входов трех компараторов и с входом пикового детектора, который соединен с одним из выходов дешифратора, входы которого соединены с выходами первого и второго компараторов, а второй выход дешифратора последовательно соединен через ключ и первый триггер с индикатором, при этом выход пикового детектора соединен со вторым входом третьего компаратора, выход которого соединен через второй триггер с индикатором и с блокировочным входом ключа, а вторые входы первого и второго компараторов соединены с первым и вторым источниками опорного напряжения соответственно Благодаря указанному, предлагаемое техническое решение обеспечивает высокую достоверность контроля границы "уголь-порода" за счет надежности реализуемого им способа контроля границы "уголь-порода", при котором исключается влияние динамических усилий на результаты из мерений, а использование электронного блока для обработки статической кривой давления нагружения индентора позволяет исключить как случайную природу распознавания, так и ситуации, связанные с неопределенностью относительно их классификации к углю или к породе Сущность изобретения поясняется чертежами На фиг 1 показан буровой исполнительный орган бурошнековой машины, на фиг 2 - датчик контроля границы "уголь-порода", на фигЗ -графики давления нагружения индентора Предлагаемый способ осуществляют следующим образом При неподвижном буровом исполнительном органе бурошнековой машины фиг 1 (в момент технологической паузы при наращивании шнекового стана) подают давление питания в штоковую полость гидродомкрата 1, показанного на фиг 2 При этом с помощью датчика давления 11, связанного со штоковой полостью гидродомкрата 1, определяют давление нагружения индентора 7 Причем максимальное давление питания штоковой полости устанавливают в пределах больших, чем давление разрушения угля и меньших - породы При выполнении этого условия и при внедрении индентора в уголь кривая давления нагружения будет иметь вид, показанный на фиг 3 (кривая а) Эта кривая характеризуется следующими участками Участок 0 - 1 - свободный ход индентора до контакта с углем, участок 1 - 2 - упругая деформация в системе гидродомкрат 1 - угольный массив, участок 2 - 3 падение давления при хрупком разрушении угля, участок 3 - 4 - 5 - возрастание давления до величины давления питания штоковой полости гидродомкрата 1 При внедрении индентора 7 в породный массив (кривая б) график давления нагружения индентора характеризуется следующими участками Участок 0 - 1 - свободный ход индентора 7 до его контакта с породой, участок 1 - 6 - 5 монотонное увеличение давления до величины давления питания Таким образом качественное отличие кривой а от кривой б при определенно выбранном давлении питания позволяет разграничить уголь (наличие участков снижения давления) от породы (монотонное возрастание давления нагружения индентора) Для этого электрический сигнал, пропорциональный давлению нагружения индентора 7 с датчика давления 9 поступает в электронный блок Пиковый детектор 13 и компаратор 12 выделяют участки снижения давления нагружения и зажигают индикатор 19 В соответствии с полученной информацией производят корректировку положения исполнительного органа горной машины Предлагаемое устройство состоит (фиг 2) из гидродомкрата 1, поршня 2, штока 3, внутри которого выполнена полость с каналами 4 для гидравлической связи со штоковой полостью гидродомкрата 1 В образованной полости штока расположен подпружиненный пружиной 5 аксиально подвижный плунжер 6 на торцовой поверхности которого расположен индентор 7, а ход 48110 плунжера 6 ограничен стопорными кольцами 8 В гидромагистраль штоковой полости встроен датчик давления 9, выходной электрический сигнал которого поступает на входы первого 10, второго 11, третьего 12 компараторов и пикового детектора 13 На вторые входы компараторов 10 и 11 подключены источники опорного напряжения 14 и 15 соответственно Выходы первого 10 и второго 11 компараторов подключены ко входам дешифратора 16 Первый выход дешифратора 16 соединен с разрешающим входом пикового детектора 13, выход которого соединен со вторым входом третьего компаратора 12 и через второй триггер 17 с ключом 18 и индикатором 19 Второй выход дешифратора через ключ 18, первый триггер 20 соединен с индикатором 19 В штоковую полость гидродомкрата 1 рабочая жидкость подается с помощью годрораспределителя 21, снабженного электромагнитами 22, а поршневая полость запитывается с помощью распределителя 23 с электромагнитами 24 Гидродомкраты 1 с целью совершенствования компоновочных возможностей установлены на корпусе 2 редуктора бурового исполнительного органа (фиг1) со стороны кровли и со стороны почвы (на чертеже не показан) Кроме этого, буровой исполнительный орган включает режущие коронки 3, секции шнекового 4 и воздухопроводного 5 ставов Работает устройство (фиг 2) следующим образом Вначале устанавливают такое давление питания в штоковой полости гидродомкрата 1, чтобы индентор 7 внедрялся в уголь и не внедрялся в породу Этим обеспечивается настройка датчика "уголь-порода" на конкретные физикомеханические свойства горных пород При бурении скважины исполнительным органом бурошнековой машины, показанным на фиг1, возникает необходимость в наращивании секций шнекового 2 и воздухопроводного 5 ставов, то есть возникает технологическая пауза в процессе бурения В этот момент, когда исполнительный орган является неподвижным, производят контроль положения бурового исполнительного органа относительно границы "уголь-порода" Для этого включают с помощью электромагнита 24 гидрораспределитель 23 При этом рабочая жидкость поступает в поршневую полость гидродомкрата 1 и выдвигает шток 3 до упора в стенку скважины Затем подают жидкость в штоковую полость гидродомкрата 1 путем включения электромагнита 22 гид ро распределителя 21 По каналам 4, выполненным в теле штока, жидкость воздействует на плунжер 6, несущий на торце индентор 7 Аксиально подвижный плунжер 6 снабжен возвратной пружиной 5 и зафиксирован стопорными кольцами 8 Под воздействием давления жидкости плунжер 6 с индентором 7 взаимодействует со стенкой скважины Вели буровой исполнительный орган (фиг1) находится в пределах угольного пласта, то индентор 7 внедряется в уголь, при этом с датчика давления 9 в электронный блок поступает сигнал, показанный на фигЗ (кривая а) В случае если исполнительный орган вышел за пределы угольного пласта, то индентор 7 не 8 внедрится в породу, что соответствует выходному сигналу датчика 9, показанному на кривой б Выходной электрический сигнал датчика давления 9 поступает одновременно на входы первою 10, второго 11, третьего 12 компараторов и пикового детектора 13 На вторые входы первого 10 и второго 11 компараторов подается опорное напряжение с источников 14 и 15 соответственно Уровень опорного напряжения источника 14 - Uoni (фигЗ) выбирается равным чуть большим, чем напряжение на выходе датчика давления соответствующее давлению, при котором осуществляется холостой ход плунжера 6 (участок 0 - 1 на кривых давления нагружения индентора) до его контакта со стенкой скважины, а опорное напряжение иОП2 источника 15 - чуть меньшим, чем уровень выходного сигнала датчика давления 9 соответствующего максимальному давлению питания штоковой полости гидродомкрата Этим обеспечивается анализ кривых давлений нагружения индентора в наиболее информативном интервале U = иОП2 и ОП 1, где сконцентрированы все особенности кривых Если уровень сигнала датчика 9 превысит и ОП 1, то срабатывает компаратор 10 и высокий уровень сигнала со второго выхода дешифратора 16 разрешает работу пикового детектора 13, выход которого подключен ко второму входу компаратора 12 Пиковый детектор 13 отслеживает входной сигнал давления 9 при его монотонном увеличении и переходит в режим хранения при наличии падающих участков на кривой до тех пор, пока уровень входного сигнала датчика 9 превысит запомненное значение и, далее, опять отслеживает входной монотонный сигнал Например, пусть с датчика давления 9 на вход пикового детектора 13 поступает сигнал, показанный на фиг 3 (кривая а), тогда выходным сигналом пикового детектора 13 будет кривая, состоящая из участков 0 - 1 - 2 - 4 - 5, то есть участок локального снижения давления 2 - 3 - 4 заменяется отрезком 2 - 4 Если же на вход пикового детектора 13 поступает монотонный сигнал 0 - 1 - 6 - 5 (кривая б) соответствующий контакту индентора 7 с породой, то выходной сигнал пикового детектора 13 полностью повторяет этот сигнал В компараторе 12 происходит сравнение сигнала датчика давления 9 и выходного сигнала пикового детектора 13 Если сигнал пикового детектора 13 превысит выходное напряжение датчика давления 9, то компаратор 12 переключает второй трипер 17 в состояние "1", который запрещает прохождение сигнала через ключ 18 и одновременно включает индикатор 19 При этом загорается светодиод "уголь" Если же на вход пикового детектора 13 поступает монотонный сигнал, соответствующий породе, то компаратор 12 ввиду равенства входных сигналов не переключит триггер 17 в состояние " 1 " Как только сигнал датчика давления 9 превысит величину иОП2 источника 15 то включается компаратор 11, который меняет код дешифратора 16 В результате чего и на первом выходе дешифратора 16 появляется высокий уровень сигнала, который проходит через ключ 18 и переключает в состояние " 1 " первый триггер 20, зажигающий светодиод "Порода" индикатора 19 48110 После распознавания границы "угольпорода" производят возврат подвижных частей гидродомкрата 1 в исходное положение Для этого вначале снимают гидрораспределителем 23 давление в поршневой полости гидродомкрата 1, в результате чего шток 3 под действием давления в штоковой полости опускается в крайнее нижнее положение, а затем снимают давление и в штоковой полости гидродомкрата 1 с помощью гидрораспределителя 21 При этом плунжер 6 опускается 10 под действием возвратной пружины 5 Корректировку положения исполнительною органа бурошнековой машины в процессе бурения производят с помощью того же гидродомкрата 1 (фиг 2) Для этого с помощью распределителя 23 (фиг1) подают давление питания в поршневую полость гидродомкрата 1 Выдвигающийся шток 3 отжимает исполнительный орган машины от кровли или от почвы ФигЗ ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюA method to control the position of executive body of the mining machine toward the coal-rock border and a device to implement it
Автори англійськоюManzhula Ivan Trokhymovych, Gulevskyi Yurii Volodymyrovych, Pichko Fedir Danylovych, Sobol Valentyn Mykolaiovych, Galukhin Mykola Oleksandrovych, Manhzula Serhii Ivanovych
Назва патенту російськоюСпособ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления
Автори російськоюМанжула Иван Трофимович, Гулевский Юрий Владимирович, Пичко Федор Данилович, Соболь Валентин Николаевич, Галухин Николай Александрович, Манжула Сергей Иванович
МПК / Мітки
МПК: E21C 35/24, E21C 39/00
Мітки: межі, відносної, пристрій, положення, машини, гірничої, виконавчого, контролю, органа, здійснення, спосіб, вугілля-порода
Код посилання
<a href="https://ua.patents.su/5-48110-sposib-kontrolyu-polozhennya-vikonavchogo-organa-girnicho-mashini-vidnosno-mezhi-vugillya-poroda-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю положення виконавчого органа гірничої машини відносно межі “вугілля-порода” і пристрій для його здійснення</a>
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Барданов Валерій Олександрович, Кібрик Ісаак Соломонович, Торубалко Тарас Григорович
МПК: E21C 35/24
Мітки: спосіб, дискретного, стругу, пристрій, лави, контролю, здійснення, місцезнаходження, виконавчого, органу
Формула / Реферат:
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Фотоприйомний пристрій для контролю положення гірничої машини

Номер патенту: 7627
Опубліковано: 26.12.1995
Автори: Прудніков Олександр Васильович, Злодєєв Олександр Васильович, Войтюк Клим Кирилович, Огійчук Юрій Іванович, Рябчиков Анатолій Єгорович
МПК: E21C 35/24
Мітки: фотоприйомний, машини, пристрій, положення, гірничої, контролю
Формула / Реферат:
фотоприемное устройство для контроля положения горной машины, содержащее фотоприемную линейку с расположенными на ней в один ряд информационными фотоэлементами, фотоусилитель, коммутатор, генератор, три элемента И и дешифратор, отличающееся тем, что, с целью повышения функциональной надежности и уменьшения погрешности, оно снабжено ключами по количеству информационных фотоэлементов, двумя компенсирующими фотоэлементами, расположенными у...
Пристрій для контролю положення гірничої машини
Номер патенту: 7630
Опубліковано: 26.12.1995
Автори: Некрасов Сергій Вікторович, Рябчиков Анатолій Єгорович, Сіненко Віктор Васильович, Злодєєв Олександр Васильович, Войтюк Клим Кирилович, Прудніков Олександр Васильович
МПК: E21C 35/24
Мітки: контролю, гірничої, машини, положення, пристрій
Формула / Реферат:
Устройство для контроля положения горной машины, содержащее лазер и задатчик опорной плоскости, установленные в выработке, а также блок индикации и подключенные к нему фотоприемные линейки, отличающееся тем, что с целью повышения его дальности действия и надежности, оно дополнительно снабжено светоиндикаторными линейками, соединенными с выходами фотоприемных линеек, а задатчик опорной плоскости выполнен из набора инфракрасных излучателей,...
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Сидоренко Іван Тимофійович, Мальцев Леонід Єгорович, Дубінін Сергій Васильович, Кривущенко Микола Тимофійович, Гринь Костянтин Афанасійович
МПК: E21C 35/24
Мітки: електромагнітної, тиристорний, пристрій, захисту, муфти, гірничої, привода, управління, машини
Формула / Реферат:
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Механізм подання гірничої машини
Номер патенту: 12171
Опубліковано: 25.12.1996
Автори: Демяненко Михайло Якович, Пальчак Микола Іванович, Агранат Арон Рувімович, Юргілевич Володимир Антонович, Пащенко Володимир Лазаревич, Аккерман Фрідріх Маркович
МПК: E21C 29/00
Мітки: гірничої, механізм, подання, машини
Формула / Реферат:
Механизм подачи горной машины, включающий кинематически связанное с двигателем зубчатое колесо, зубья которого установлены с возможностью взаимодействия с цевочной рейкой, тормозное приспособление в виде гидроцилиндра с подпружиненным со стороны поршневой полости поршнем, на котором соосно установлен с возможностью размещения во впадине между смежными зубьями зубчатого колеса шток, и гидравлически связанный со штоковой полостью...
Наступний патент: Фармацевтична композиція для інгаляції, спосіб її приготування (варіанти) та інгалятор
Випадковий патент: Склад морозива молочно-пшеничного з еритритолом