Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу
Номер патенту: 68241
Опубліковано: 26.03.2012
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
Формула / Реферат
Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу, який відрізняється тим, що протягом пуску та гальмування крана задається приводне (гальмівне) зусилля руху крана, яке змінюється за поліноміальною залежністю від аргументу часу, причому процес гальмування відрізняється від пуску тим, що динамічна складова зусилля входить у вказану поліноміальну залежність зі знаком "-": для пуску Fпуск = Fдин.+W, для гальмування Fгальм = -Fдин.+ W.
Текст
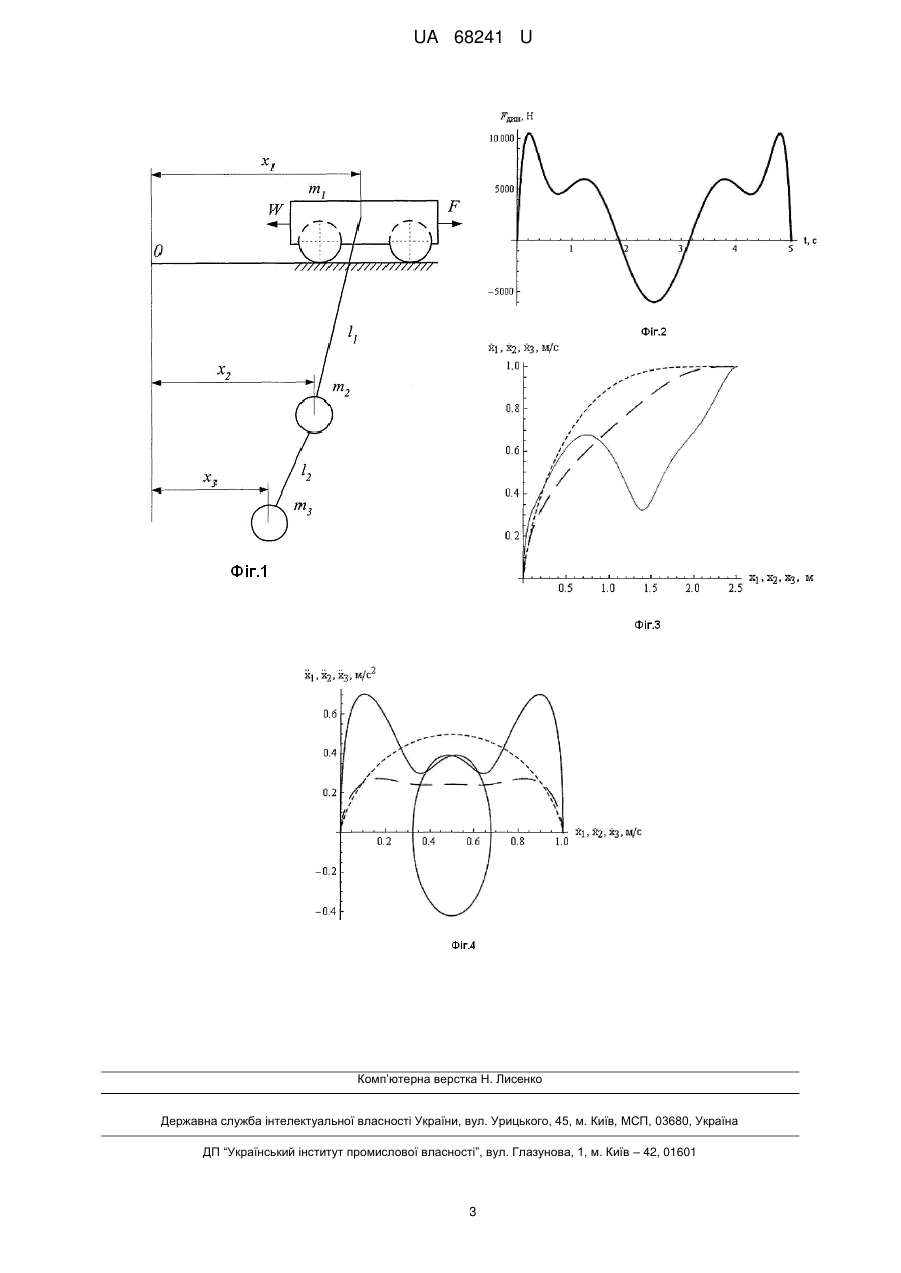
Реферат: Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу, згідно з яким, протягом пуску та гальмування крана задається приводне (гальмівне) зусилля руху крана, яке змінюється за поліноміальною залежністю від аргументу часу. UA 68241 U (54) СПОСІБ КЕРУВАННЯ РЕЖИМАМИ ПУСКУ ТА ГАЛЬМУВАННЯ КРАНА З ТРАВЕРСНОЮ ПІДВІСКОЮ ВАНТАЖУ UA 68241 U UA 68241 U 5 10 15 20 Корисна модель належить до підйомних кранів, зокрема до способів керування пуском та гальмування кранів прольотного типу з траверсною підвіскою вантажу. Відомий спосіб (Григоров О.В., Петренко Н.О. Вантажопідйомні машини. -X.: ХТУ "ХПІ", 2006.-304с.) керування краном прольотного типу, за якими здійснюється усунення коливань вантажу протягом трьох часових інтервалів. На часових інтервалах приводне або гальмівне зусилля приводу крана є максимальним. При переході від одного часового інтервалу до іншого зусилля приводу крана змінюється стрибкоподібно. У більшості випадків привод крана обладнується асинхронним електродвигуном. Стрибкоподібна зміна моменту на валу асинхронного двигуна спричиняє значні струмові перевантаження і, як наслідок, може викликати перегрів двигуна та вихід його з ладу. Як найближчий аналог прийнято спосіб (патент №94511 на корисну модель, опубл. 10.05.2011 бюл. №9, МПК В66С13/06, 13/22, Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, автори: Ловейкін B.C., Ромасевич Ю.О.), який характеризується тим, що пуск (гальмування) крана відбувається плавно, без стрибкоподібних змін приводного (гальмівного) зусилля. Такий спосіб може бути використаний для більшості кранів прольотного типу. Недоліком даного способу є те, що при використанні його для кранів, які мають траверсну підвіску, не може бути забезпечене усунення коливань вантажу. Причиною є вплив траверсної підвіски на динаміку руху вантажу та крана і, як наслідок, їх положення і швидкості у кінці розгону не співпадають, а коливання вантажу після пуску або гальмування крана залишаються. Корисною моделлю ставиться задача усунути вплив траверси протягом пуску (гальмування) крана для забезпечення відсутності коливань вантажу у кінці пуску (гальмування). Поставлена задача вирішується тим, що протягом пуску крана на нього діє приводне зусилля, зміна якого описується поліноміальною залежністю від аргументу часу: m m m t t 8192q13t 13t 3 1 6 m m m m m m 42914t 14t 3 gm t t 16384q143t 286t 198t 55t 5 429 1 360 m 8192 308t 616t 423t 115t 10 g q429t 1287t 1485t 825t 225t 27t 429 462t 1386t 1596t 882t 238t 28t W, Fпуск 28t t 1 14 2 4 3 4 4 2 2 2 2 2 2 3 4 3 2 2 2 2 1 2 2 2 3 2 1 1 3 4 2 3 3 2 4 6 5 4 2 3 3 5 2 4 30 35 6 5 2 25 (1) 1 2 1 2 5 3 4 4 6 2 6 де g - прискорення вільного падіння, м/с ; t - поточний час, с; T- тривалість пуску крана, с; - номінальна швидкість руху крана, м/с; m1, m2, m3 - приведена до поступального руху маса крана з приводним механізмом, маса траверси та маса вантажу відповідно, кг; 1 - довжина гнучкого підвісу, яка з'єднує точку підвісу (масу m1 крана) та траверсу, м; 2 - довжина гнучкого підвісу, яка з'єднує траверсу та вантаж, м; W - сила опору переміщенню, що діє на кран, Н; q коефіцієнт, який визначається за такою формулою: 2q={429T(33037200000( 1 2m1m2) 2 2 2 2 2 247296000g 1 2m1m2( 2m2(m1+m2)+ 1m1(m2+m3))T +575000g ( 2 m2 (m1+m2) + 2 2 2 4+ 1 m 1(m2+m3) +2 1 2m1m2(2m2(m2+m3)+m1(2m2+m3)))T 3 6 6800g m2(m1+m2+m3)( 2m2(m1+m2)+ 1m1(m2+m3))T + 4 2 2 8 2+29g m2 (m1+m2+m3) T ) }{16384(1453636800( 1 2m1m2) (2) 2 10432800g 1 2m1m2( 2m2(m1+m2)+ 1m1(m2+m3))T + 2 2 2 2 2 2 2 +230000g ( 2 m2 {m1+m2) + 1 m1 (m2+m3) + 4+2 1 2m1m2(2m2(m2+m3)+m1(2m2+m3)))Т 3 6 4 2 2 8 -1 2500g m2(m1+m2+m3)( 2m2(m1+m2)+ 1m1(m2+m3))T +9g m 2(m1+m2+m3) Τ )} На Фіг.1. зображено динамічну модель руху крана з траверсною підвіскою вантажу. На Фіг.2 зображено графік зміни динамічної складової приводного зусилля, що діє на кран протягом пуску. На Фіг.3 представлені фазові портрети руху приведеної маси крана, траверси та вантажу (лінія з густою штриховкою - фазовий портрет руху вантажу, лінія з рідкою штриховкою фазовий портрет руху траверси, суцільна лінія - фазовий портрет руху крана). На Фіг. 4 представлені "некласичні" фазові портрети (у координатах "прискорення-швидкість") руху приведеної маси крана, траверси та вантажу ("густота" штриховки ліній "некласичних" фазових портретів для відповідних мас не змінюється). Графічні залежності представлені на Фіг.2-4 побудовані для таких параметрів пуску крана: m1=15000кг, m2=250кг, m3=500кг, =1м/c, Т=5с, 1=5м, 2=4м. 1 UA 68241 U 5 10 15 20 25 В результаті дії на кран приводного зусилля (Фіг.2), яке описується залежністю (1) у кінці пуску крана коливання вантажу усуваються повністю (Фіг.3). Відмітимо нульові початкове та кінцеве прискорення крана протягом пуску (Фіг. 4), що зменшує динамічні удари у кінематичних зачепленнях його приводу. Гальмування крана відбувається аналогічно процесу пуску. Коливання вантажу протягом пуску усуваються. Отже, якщо на рух вантажу, траверси або крана не впливають непередбачувані фактори (наприклад, вітрове навантаження), то у момент початку гальмування швидкість крана рівна номінальній швидкості, а коливання вантажу будуть відсутні. У такому випадку для того, щоб загальмувати кран з усуненням коливань вантажу необхідно створити гальмівне зусилля, яке описується залежністю (1) з тією лише різницею, що динамічна складова зусилля буде входити у вираз зі знаком "-": для пуску Fпуск=Fдин.+W, для гальмування Fгальм= Fдин.+W. Алгоритмічну реалізацію пропонованого способу опишемо на прикладі пуску крана. У початковий момент часу відбувається зчитування інформації про масу вантажу m3, закріпленого на гнучкому підвісі та довжину гнучкого підвісу 1. Сигнал, пропорційний масі вантажу m3, може бути сформований за допомогою тензометричного S-подібного датчика маси. Сигнал про поточне значення довжини гнучкого підвісу 1 може бути сформований енкодером, який встановлений на валу канатного барабану, або за допомогою лазерного датчика відстані. Величина m2 визначається конструкцією траверси і є незмінною. Величина 2, як правило, є незмінною у процесі експлуатації крана протягом робочої зміни. Якщо величина 2 змінюється, то необхідно ввести відповідне налаштування у програму реалізації керування рухом крана. Надалі за формулою (2) визначається невідомий коефіцієнт q. Після цього відбувається формування сигналу про величину пускового зусилля в залежності від часу і відправка цього сигналу на виконавчий пристрій. Формування сигналу може виконуватись у цифровій або аналоговій формі. Якщо сигнал цифровий, то його формування виконується у вигляді двомірного масиву, де дискретному значенню часу tί відповідає дискретне значення пускового зусилля Fпуск, (і=0, 1, 2,…, 30 35 40 ; де n - довжина масиву). n Аналоговий сигнал, на відміну від цифрового, формується лише протягом пуску крана і одразу подається на виконавчий пристрій. Виконавчим пристроєм, у даному випадку, може бути частотний перетворювач векторного типу, здатний керувати електромагнітним моментом асинхронного двигуна. Після того як виконавчий пристрій „відпрацював" пуск, усталений рух та гальмування крана відбувається "очистка" локальних змінних про рух крана (маса вантажу m3 та довжина гнучкого підвісу 1). Система керування рухом крана знову готова до виконання наступного перевантажувального циклу. Пропонований спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу може збільшити продуктивність виконання перевантажувальних операцій за рахунок усунення коливань вантажу. Крім того, динамічні навантаження у конструктивних елементах крана при такому керуванні будуть незначними, а це підвищить надійність та довговічність крана. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу, який відрізняється тим, що протягом пуску та гальмування крана задається приводне (гальмівне) зусилля руху крана, яке змінюється за поліноміальною залежністю від аргументу часу, причому процес гальмування відрізняється від пуску тим, що динамічна складова зусилля входить у вказану поліноміальну залежність зі знаком "-": для пуску Fпуск=Fдин.+W, для гальмування Fгальм= -Fдин.+W. 2 UA 68241 U Комп’ютерна верстка Н. Лисенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of start-up and braking crane with load traverse suspension
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ управления режимами пуска и торможения крана с траверсной подвеской груза
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/06
Мітки: підвіскою, спосіб, керування, гальмування, вантажу, траверсною, крана, пуску, режимами
Код посилання
<a href="https://ua.patents.su/5-68241-sposib-keruvannya-rezhimami-pusku-ta-galmuvannya-krana-z-traversnoyu-pidviskoyu-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу</a>
Пристрій для двоступінчастого гальмування електромеханічного приводу механізмів горизонтального переміщення вантажу електромостового крана
Номер патенту: 15913
Опубліковано: 17.07.2006
Автори: Кирильченко Петро Миколайович, Бойко Володимир Семенович, Ірха Віктор Миколайович, Доманов Валерій Анатолійович, Токарев Веніамін Петрович, Токарев Валерій Веніамінович, Баранов Михайло Григорович
МПК: F16D 51/00, H02P 3/18
Мітки: гальмування, приводу, переміщення, електромостового, вантажу, двоступінчастого, горизонтального, пристрій, крана, механізмів, електромеханічного
Формула / Реферат:
Пристрій для двоступінчастого гальмування електромеханічного приводу механізмів горизонтального переміщення вантажу електромостового крана, що містить силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, у силове коло електродвигуна електромеханічного приводу моста паралельно ввімкнено реле пуску електродвигуна гідроштовхача гальма, нормально відкриті контакти якого...
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу
Номер патенту: 54172
Опубліковано: 17.02.2003
Автор: Холодний Валерій Іванович
МПК: B66C 13/04
Мітки: транспортного, гнучкою, приводом, пристрій, підвіскою, вантажу, керування, механізму
Формула / Реферат:
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу, який містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), перший суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння, а також послідовно з'єднані датчик довжини підвіски вантажу , блок добування квадратного кореня,...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: підвішеного, обмеження, пристрій, розгойдувань, візка, вантажу, крана
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні
Номер патенту: 67476
Опубліковано: 15.06.2004
Автори: Дорохов Микола Юрійович, Крупко Валерій Григорович
МПК: B66D 5/00, F16G 13/00
Мітки: пристрій, гальмуванні, зменшення, пуску, вантажу, розгойдування
Формула / Реферат:
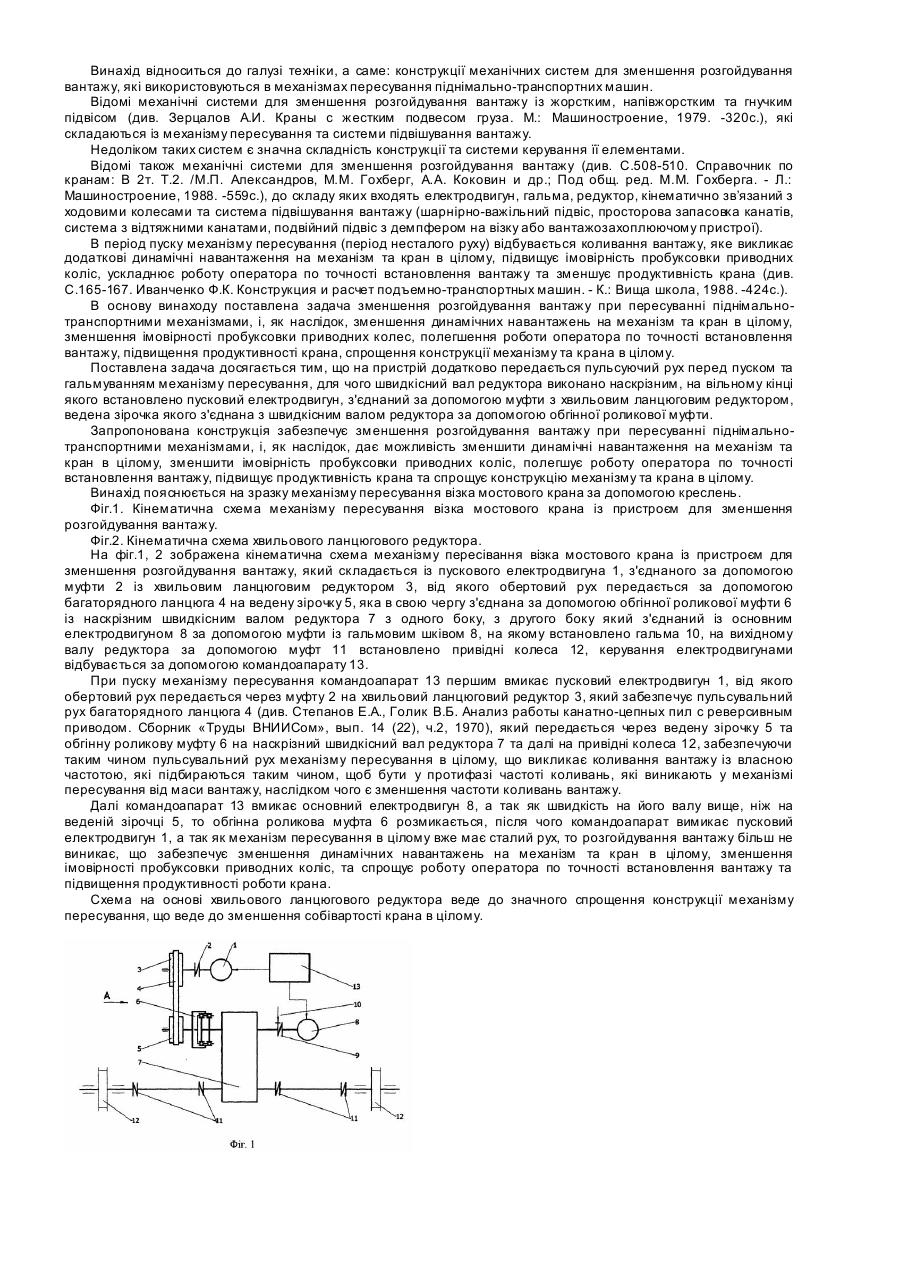
Пристрій для зменшення розгойдування вантажу при пуску та гальмуванні, до складу якого входять електродвигун, гальма, редуктор, кінематично зв'язаний з ходовими колесами та системи підвішування вантажу, який відрізняється тим, що для додаткової передачі пульсуючого руху перед пуском та гальмуванням механізму пересування швидкісний вал редуктора виконано наскрізним, на вільному кінці вала встановлено пусковий електродвигун, з'єднаний за...
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16131
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Паламарчук Дмитро Анатолійович, Ярошенко Володимир Федорович
МПК: B66C 19/00
Мітки: горизонтальним, механізм, переміщенням, вильоту, зміни, вантажу, крана, системі, стрілової
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що містить хобот, контрхобот, жорстку відтяжку, вантажний канат та стрілу, який відрізняється тим, що з кронштейном, який є продовженням жорсткої відтяжки, жорстко з'єднаний некруглий зубчастий сектор, що перебуває в постійному зачепленні з некруглим зубчастим колесом, з'єднаним з редуктором електродвигуна з можливістю отримання обертового моменту.
Попередній патент: Спосіб автоматичного регулювання швидкості машинно-тракторного агрегата
Наступний патент: Змішувач кормів
Випадковий патент: Спосіб фокусування цифрової фотокамери