Автоматизований дослідницький комплекс безпілотного літального апарата
Номер патенту: 76187
Опубліковано: 25.12.2012
Автори: Джулгаков Віталій Георгійович, Шелест Андрій Миколайович, Кулік Анатолій Степанович
Формула / Реферат
Автоматизований дослідницький комплекс безпілотного літального апарата, який містить блок баз даних, блок моделювання поведінки літального апарата, блок ручного керування, блок динамічного моделювання навколишнього середовища, який відрізняється тим, що до нього введені безпілотний літальний апарат як об'єкт дослідження, керований підвіс, вихід якого з'єднаний з першим входом безпілотного літального апарата, модуль збору даних, входи якого з'єднані з інформаційними виходами безпілотного літального апарата, модуль керування, перший вхід якого з'єднаний з виходом модуля збору даних, а перший вихід з'єднаний з керованим підвісом, другий вихід з'єднаний із другим входом безпілотного літального апарата, серверний персональний комп'ютер, перший вхід якого з'єднаний з третім виходом модуля керування, блок візуалізації, вхід якого з'єднаний з першим виходом серверного персонального комп'ютера, блок обміну даними, вхід якого з'єднаний з другим виходом серверного персонального комп'ютера, клієнтські персональні комп'ютери, входи яких з'єднані з виходом блока обміну даними, серверний персональний комп'ютер містить блок динамічного моделювання навколишнього середовища, блок баз даних, блок моделювання поведінки літального апарата, блок настройки, електронних карт, блок об'ємних сцен, блок приладової панелі, які взаємозв'язані один з одним.
Текст
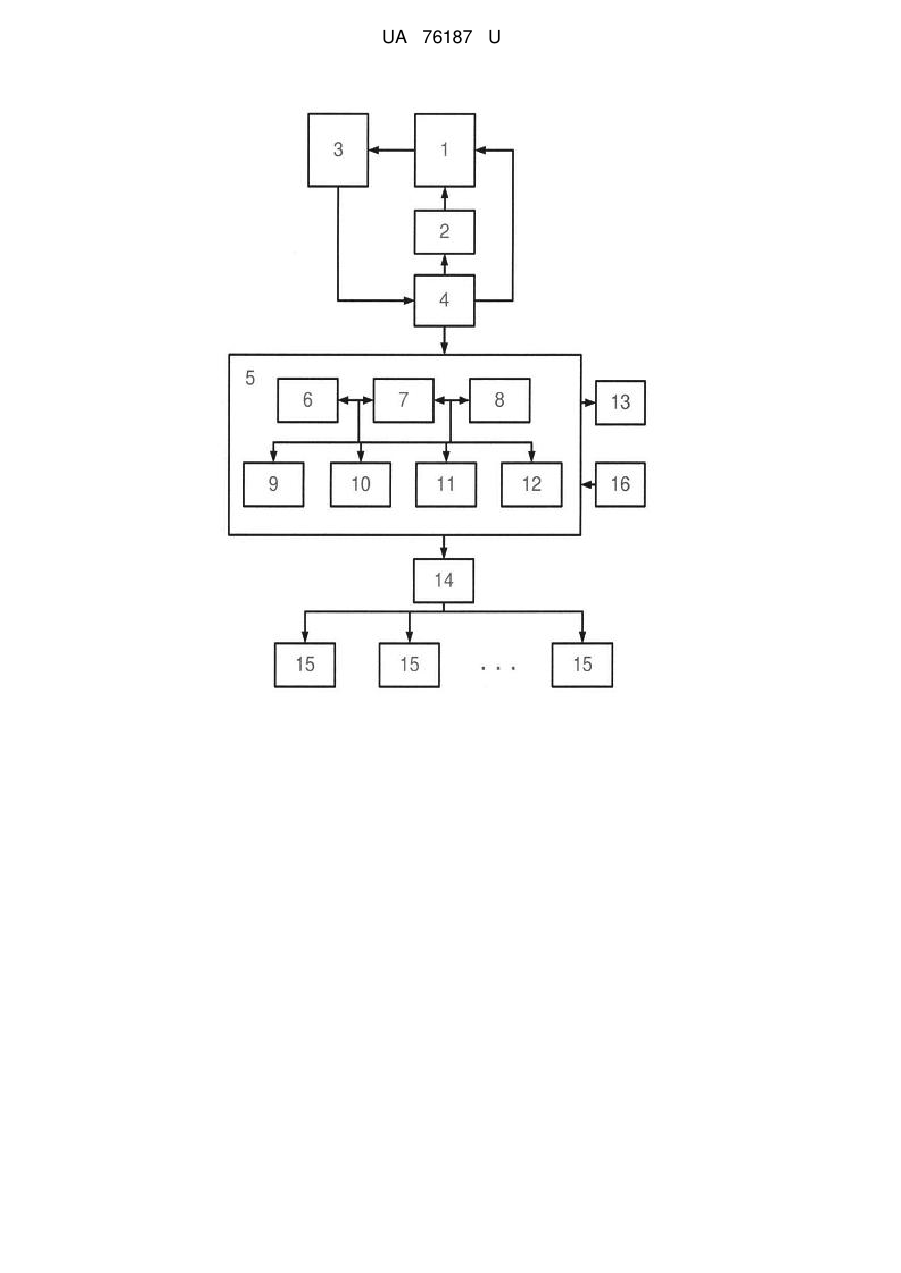
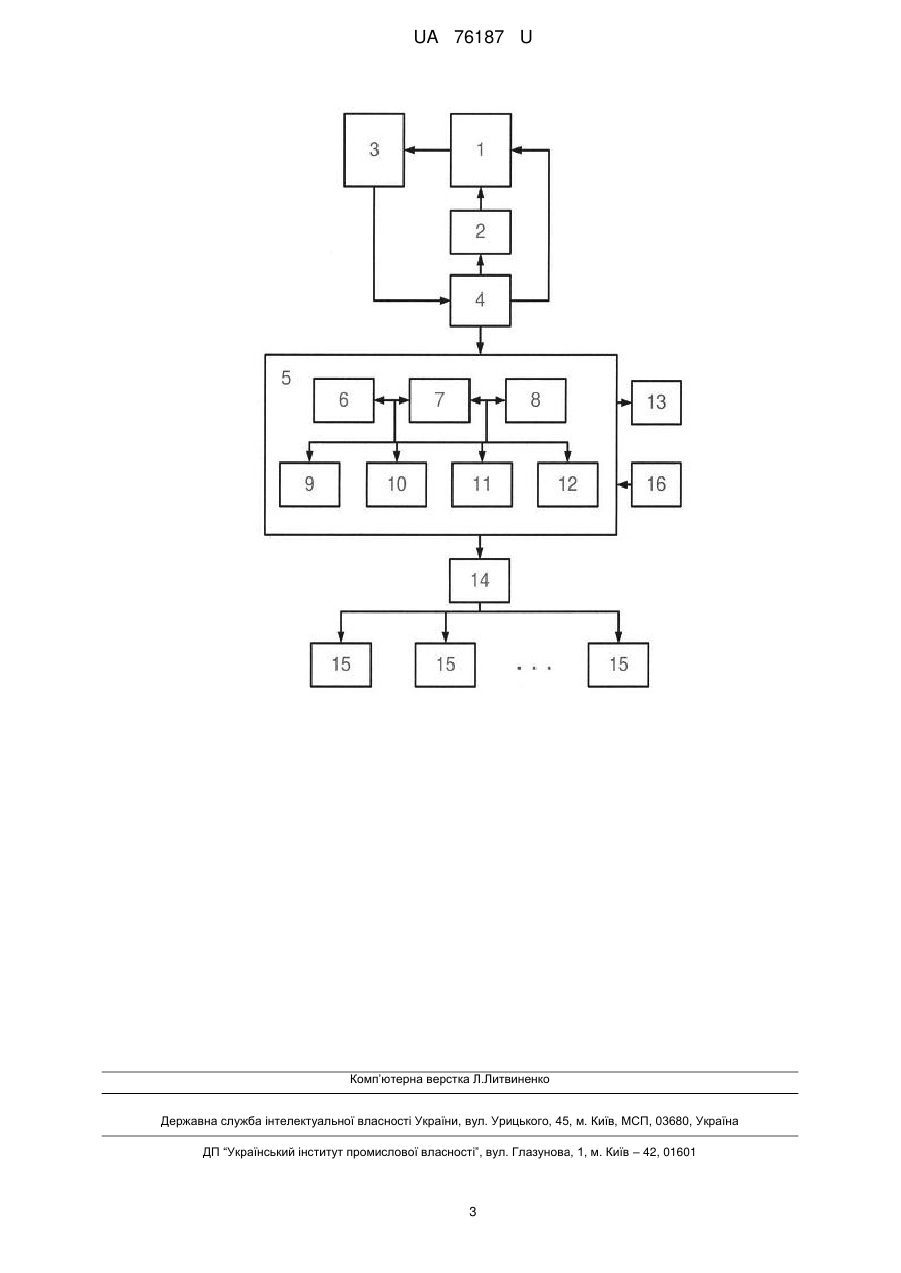
Реферат: UA 76187 U UA 76187 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки, зокрема до авіаційних тренажерів і використовується для імітації динаміки літальних апаратів у масштабі реального часу при зльоті, крейсерському польоті та посадці. Відомий тренажер Лінка [Меерович Г.Ш. и др. Авиационные тренажеры и безопасность полетов. - М.: Воздушный транспорт, 1991. - С. 15], що являє собою спрощений макет одномісного літака з кабіною, закріпленою на універсальному шарнірі, який дозволяє літаку здійснювати імітований політ зі змінними кутами тангажа, крену та рискання. В тренажері передбачена наявність інструктора, який здійснює контроль пілотування за заданою програмою. Недоліками цього тренажера є відсутність можливості імітувати змінення параметрів польоту під дією відхилень аеродинамічних поверхонь, а також не передбачена імітація аварійних ситуацій та відпрацювання дій пілота в таких ситуаціях. Відомий найбільш близький та вибраний як прототип автоматизований тренажерний комплекс транспортного засобу (патент РФ № 2398285 С2 G09B9/02, Автоматизированный тренажерный комплекс транспортного средства, опубл. 27.08.2010), який містить взаємозв'язані з маршрутизатором блок інструктора, блок баз даних, блок моделювання поведінки транспортного засобу, диспетчер тренажерних задач і засобу візуалізації, а також конфігуратор тренажеру, підключений до диспетчера тренажерних задач і комплект бортового обладнання, взаємозв'язаний з блоком моделювання поведінки транспортного засобу, блок ручного керування, блок динамічного моделювання навколишнього середовища, блок настройки візуальних моделей. Засоби візуалізації містять блоки візуальних моделей, кожна із яких складається з наборів модулів візуального представлення фіксованого сектора обзору і модулів пред'явлення візуального представлення фіксованого сектора огляду, при цьому блок ручного керування, блок динамічного моделювання навколишнього середовища, блок моделювання тактичної обстановки і блок настройки візуальних моделей взаємозв'язані з маршрутизатором, а вихід модуля настройки підключений до конфігуратора тренажера. Недоліком цього автоматизованого тренажерного комплексу є відсутність реального транспортного засобу як об'єкта керування для більшої реалістичності та інформативності процесу навчання. Задачею запропонованої корисної моделі є забезпечення більшої реалістичності та інформативності процесу навчання керуванням безпілотним літальним апаратом. Поставлена задача вирішується тим, що в автоматизований дослідницький комплекс безпілотного літального апарата, що включає блок баз даних, блок моделювання поведінки літального апарата, блок ручного керування, блок моделювання навколишнього середовища, згідно з корисною моделлю, введені безпілотний літальний апарат як об'єкт дослідження, керований підвіс, вихід якого з'єднаний з першим входом безпілотного літального апарата, модуль збору даних, входи якого з'єднані з інформаційними виходами безпілотного літального апарата, модуль керування, перший вхід якого з'єднаний з виходом модуля збору даних, а перший вихід з'єднаний з керованим підвісом, другий вихід з'єднаний із другим входом безпілотного літального апарата, серверний персональний комп'ютер, перший вхід якого з'єднаний з третім виходом модуля керування, блок візуалізації, вхід якого з'єднаний з першим виходом серверного персонального комп'ютера, блок обміну даними, вхід якого з'єднаний з другим виходом серверного персонального комп'ютера, клієнтські персональні комп'ютери, входи яких з'єднані з виходом блока обміну даними, серверний персональний комп'ютер містить блоки моделювання навколишнього середовища, блок баз даних, блок моделювання поведінки літального апарата, блок настройки, блок електронних карт, блок об'ємних сцен, блок приладової панелі, які взаємозв'язані один з одним. Суть корисної моделі пояснюється кресленнями, де наведена схема автоматизованого дослідницького комплексу безпілотного літального апарата. Автоматизований дослідницький комплекс безпілотного літального апарата включає безпілотний літальний апарат 1 як об'єкт дослідження, який є зменшеною моделлю реального літального апарата з органами керування літальним апаратом, його агрегатами і системами, датчиками і системою автоматичного керування, до якої підключені датчики та силові органи керування. Керований підвіс 2 з'єднаний з безпілотним літальним апаратом 1 та виконує функцію обертання безпілотного літального апарата 1 навколо його точки підвісу на кути тангажа, крену та курсу. Модуль збору даних 3 виконує функцію збору даних з усіх вимірювачів на борту безпілотного літального апарата 1, входами з'єднаний з інформаційними виходами безпілотного літального апарата 1, а вихід з'єднаний з першим входом модуля керування 4. Модуль керування 4 виконує функцію формування сигналів керування для керованого підвісу 2 та бортового обладнання безпілотного літального апарата 1, а також для передачі інформації про стан безпілотного літального апарата 1 до серверного персонального комп'ютера 5. Тому 1 UA 76187 U 5 10 15 20 25 30 перший вихід модуля керування 4 з'єднаний з керованим підвісом 2, другий вихід з'єднаний із входом безпілотного літального апарата 1. Серверний персональний комп'ютер 5 є пристроєм для збору та обробки отриманої інформації та містить блоки динамічного моделювання навколишнього середовища 6, блок баз даних 7, блок моделювання поведінки літального апарата 8, блок настройки 9, блок електронних карт 10, блок об'ємних сцен 11, блок приладової панелі 12, які взаємозв'язані один з одним. Перший вхід серверного персонального комп'ютера 5 з'єднаний з модулем керування 4. Перший вихід серверного персонального комп'ютера 5 з'єднаний з блоком візуалізації 13. Блок візуалізації 13 (наприклад телевізор або проектор з екраном) необхідний для відображення необхідної інформації для користувачів. Другий вихід серверного персонального комп'ютера 5 з'єднаний з блоком обміну даними 14, який виконує функцію обміну інформацією між серверним персональним комп'ютером 5 та клієнтськими персональними комп'ютерами 15. Входи клієнтських персональних комп'ютерів 15 з'єднані з виходом блока обміну даними 14. Другий вхід серверного персонального комп'ютера 5 з'єднаний з блоком ручного керування 16, який необхідний для виконання ручного керування керованим підвісом 2 та безпілотним літальним апаратом 1. Автоматизований дослідницький комплекс безпілотного літального апарата працює наступним чином. Сигнали керування керованим підвісом 2 та безпілотним літальним апаратом 1 формуються за допомогою серверного персонального комп'ютера 5 з використанням блока ручного керування 16 або блока моделювання поведінки літального апарата 8. Сигнал керування передається до модуля керування 4, який формує потрібні сигнали для змінення просторового положення безпілотного літального апарата 1. Інформація про стан безпілотного літального апарата 1 збирається та передається до модуля керування 4 за допомогою модуля збору даних 3. Зібрані дані надходять до серверного персонального комп'ютеру 5, де обробляються за допомогою алгоритмічних блоків моделювання навколишнього середовища 6, баз даних 7, моделювання поведінки літального апарата 8, електронних карт 10, об'ємних сцен 11, приладової панелі 12, які взаємодіють один з одним. Первинні характеристики безпілотного літального апарата 1 та інших елементів комплексу заносяться за допомогою блока настройки 9. Візуалізація отриманої інформації виконується за допомогою блока візуалізації 13. Також ця інформація передається до клієнтських персональних комп'ютерів 15, де відбувається її обробка, за допомогою блока обміну даними 14. Таким чином, запропонована корисна модель дозволяє отримати більшу реалістичність та інформативність процесу навчання керуванням безпілотним літальним апаратом. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 Автоматизований дослідницький комплекс безпілотного літального апарата, який містить блок баз даних, блок моделювання поведінки літального апарата, блок ручного керування, блок динамічного моделювання навколишнього середовища, який відрізняється тим, що до нього введені безпілотний літальний апарат як об'єкт дослідження, керований підвіс, вихід якого з'єднаний з першим входом безпілотного літального апарата, модуль збору даних, входи якого з'єднані з інформаційними виходами безпілотного літального апарата, модуль керування, перший вхід якого з'єднаний з виходом модуля збору даних, а перший вихід з'єднаний з керованим підвісом, другий вихід з'єднаний із другим входом безпілотного літального апарата, серверний персональний комп'ютер, перший вхід якого з'єднаний з третім виходом модуля керування, блок візуалізації, вхід якого з'єднаний з першим виходом серверного персонального комп'ютера, блок обміну даними, вхід якого з'єднаний з другим виходом серверного персонального комп'ютера, клієнтські персональні комп'ютери, входи яких з'єднані з виходом блока обміну даними, серверний персональний комп'ютер містить блок динамічного моделювання навколишнього середовища, блок баз даних, блок моделювання поведінки літального апарата, блок настройки, електронних карт, блок об'ємних сцен, блок приладової панелі, які взаємозв'язані один з одним. 2 UA 76187 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated research complex of unmanned aircraft
Автори англійськоюKulik Anatolii Stepanovych, Dzhulhakov Vitalii Heorhiiovych, Shelest Andrii Mykolaiovych
Назва патенту російськоюАвтоматизированный исследовательский комплекс беспилотного летательного аппарата
Автори російськоюКулик Анатолий Степанович, Джулгаков Виталий Георгиевич, Шелест Андрей Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: комплекс, безпілотного, автоматизований, літального, апарата, дослідницький
Код посилання
<a href="https://ua.patents.su/5-76187-avtomatizovanijj-doslidnickijj-kompleks-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Автоматизований дослідницький комплекс безпілотного літального апарата</a>
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: G05D 1/03, B64C 13/00
Мітки: керування, безпілотного, система, апарата, літального
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Бондар Катерина Михайлівна, Амелін Сергій Вікторович, Жалніна Вікторія Василівна
МПК: G05D 1/03
Мітки: літального, бокового, стабілізації, каналу, безпілотного, апарата, система
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Фірсов Сергій Миколайович, Антонєвич Ганна Олександрівна, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: безпілотного, система, керування, апарата, літального
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: відмовостійка, літального, стабілізації, кутової, безпілотного, система, апарата
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, безпілотного, стабілізації, система, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Попередній патент: Добавка дієтична “екстракт личинок воскової молі “галерія мелонелла”
Наступний патент: Апарат універсальний для виготовлення попкорну “попкорн-старлайн”
Випадковий патент: Спосіб виготовлення вугільного пилу