Електрогідравлічний слідкувальний привід
Формула / Реферат
1. Електрогідравлічний слідкувальний привід, що має основний контур, лінія прямого зв'язку якого містить послідовно встановлені електричний суматор, підсилювач потужності, з виходом якого з'єднаний виконавчий механізм, що містить електрогідравлічний перетворювач і гідравлічно з'єднаний з ним об'єкт руху, а лінія зворотного зв'язку контуру містить датчик зворотного зв'язку за положенням об'єкта руху, з'єднаний з суматором, а також нелінійний коригуючий елемент, який в свою чергу зв’язаний з електричним суматором, який відрізняється тим, що електрогідравлічний перетворювач виконаний як електрогідравлічний підсилювач з нелінійністю типу "зона нечутливості", яка обумовлена наявністю в його конструкції золотника з позитивним перекриттям, а нелінійний коригуючий елемент виконаний як підсилювач електронний з нелінійністю типу "насичення" і з'єднує між собою вихід електричного суматора і вхід підсилювача потужності, при цьому привід обладнаний додатковим електричним суматором, який установлений в лінії зворотного зв’язку, при цьому електричний датчик зворотного зв'язку з'єднаний з негативним входом додаткового суматора, а вихід підсилювача електронного з нелінійністю типу "насичення" з'єднаний з позитивним входом додаткового електричного суматора, при цьому вихід додаткового суматора з'єднаний з окремим входом основного суматора.
2. Електрогідравлічний слідкувальний привід за п. 1, який відрізняється тим, що підсилювач електронний з нелінійністю типу "насичення" має величину амплітуди виходу більше половини зони нечутливості.
Текст
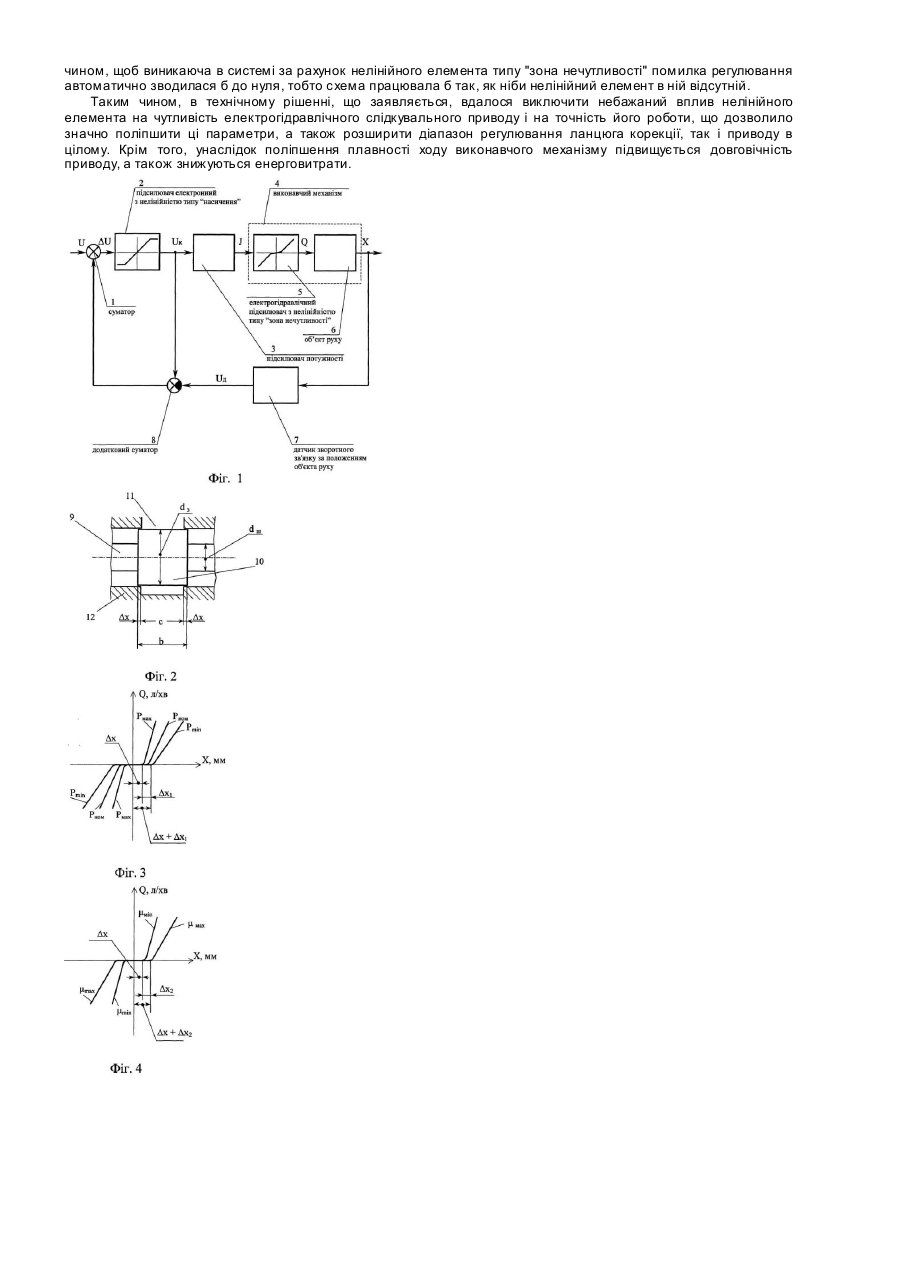
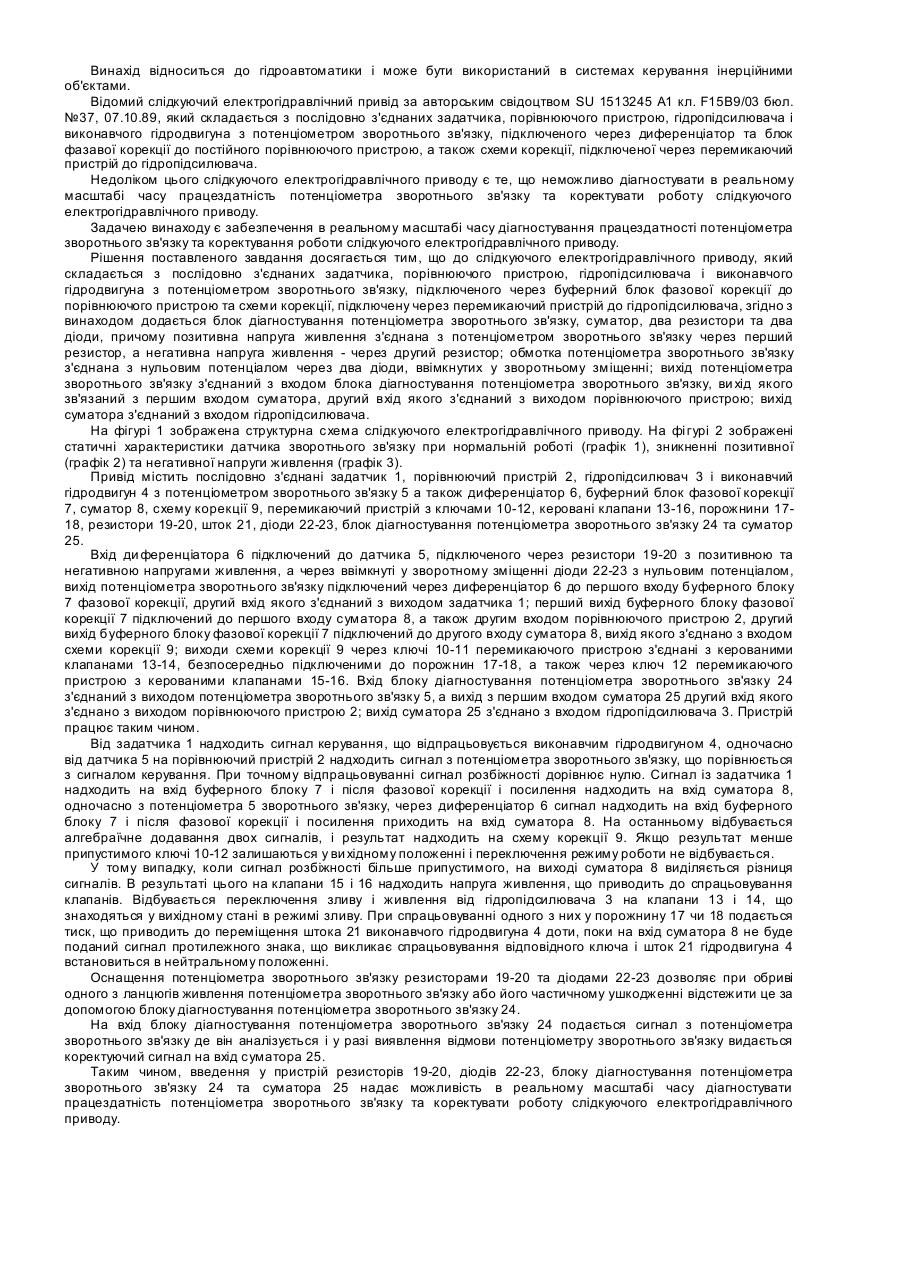
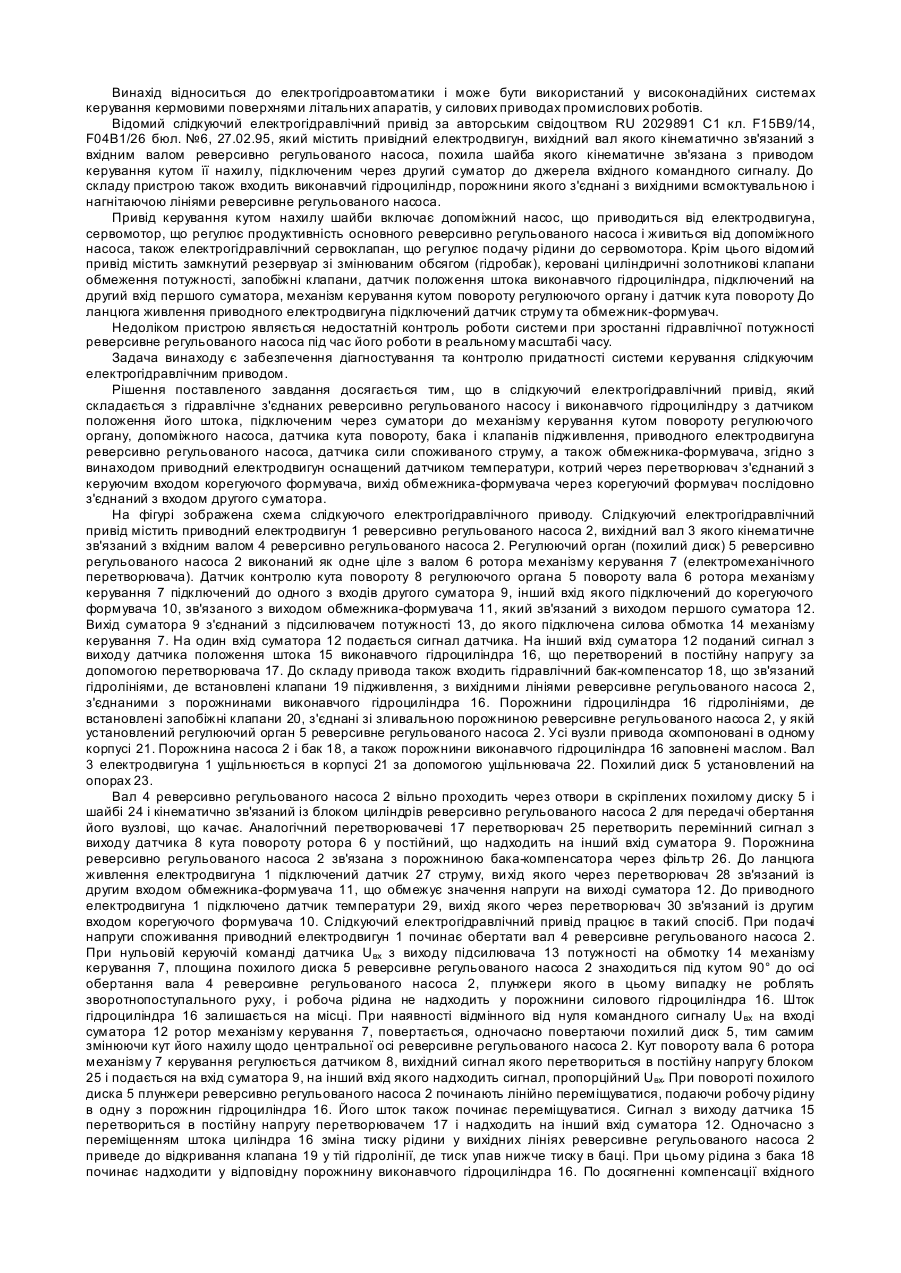
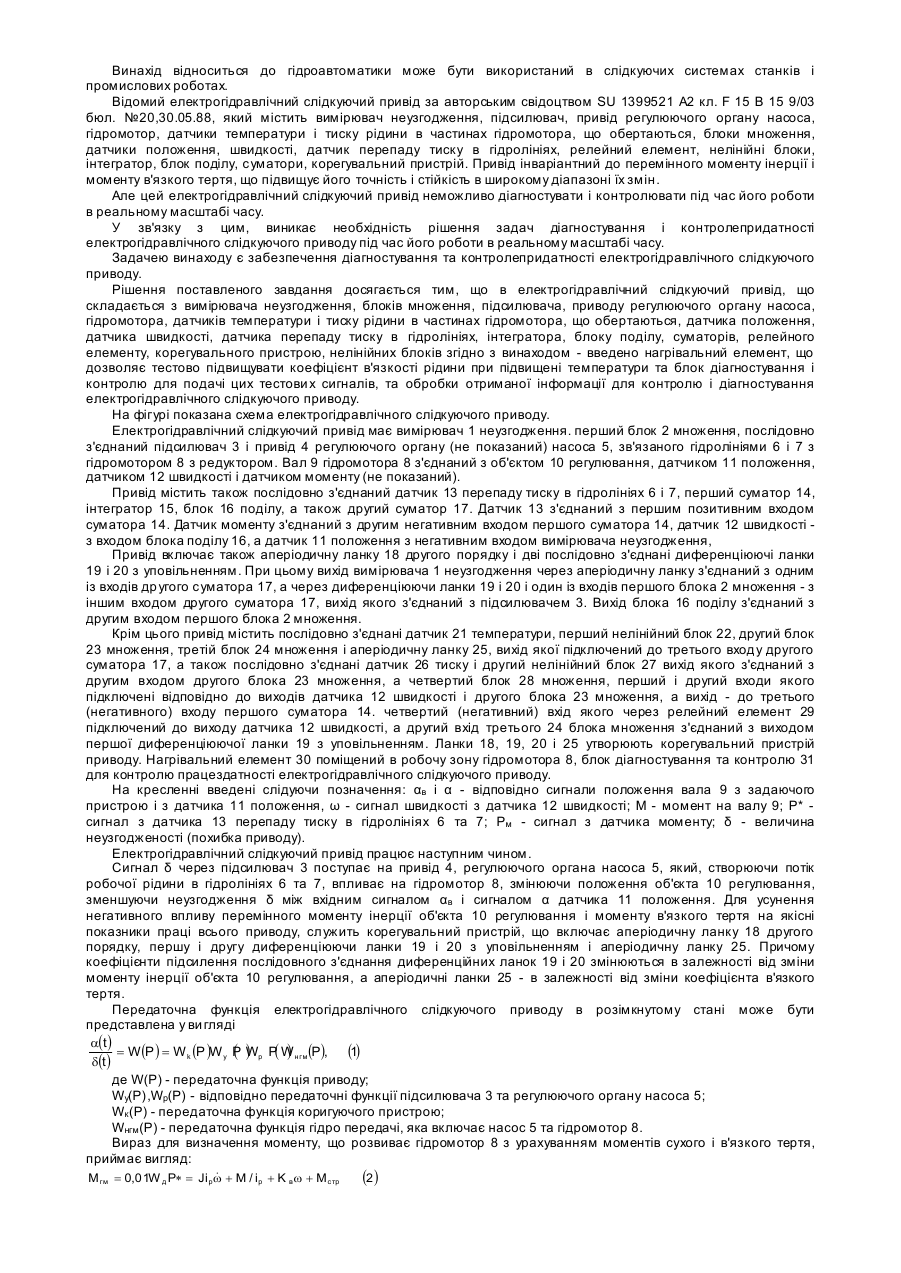
Винахід відноситься до систем автоматичного керування, які містять елементи, що мають нелінійність типу "зона нечутливості", зокрема, до електрогідравлічних слідкувальних приводів, в яких використовуються золотники з позитивним перекриттям, і може бути використаний в приводах верстатів, пресів та іншого устаткування. Від повноти компенсації "зони нечутливості" електрогідравлічних слідкувальних приводів залежить точність позиціювання їх виконавчих механізмів. В електрогідравлічних слідкувальних приводах, в яких використовуються золотникові гідророзподільники як регулюючі і розподільні пристрої, найчастіше, золотники гідророзподільників виконують з позитивним перекриттям, так як виконання нульового перекриття в циліндричних золотниках зустрічає великі технологічні труднощі [див. "Элементы гидропривода (Справочник). Абрамов Е.И., Колесниченко К.А., Маслов В.Т. "Те хніка", Харьков, 1969, с.112]. Золотники с позитивним перекриттям мають "зону нечутливості", яка обумовлена величиною позитивного перекриття. Золотники з позитивним перекриттям як виконавчі елементи регулюючи х і розподільних пристроїв системи автоматичного керування вносять в останню нелінійність типу "зона нечутливості". Крім того, величина "зона нечутливості" золотника (золотникової пари: золотник-корпус золотника) як виконавчого елемента системи автоматичного керування в процесі роботи може значно змінюватися внаслідок наступних факторів: а) механічного зносу робочих кромок золотника; б) зміни в'язкості робочої рідини при зміни її температури через її нагрів під час дроселювання в процесі багатогодинної роботи гідроприводу або через зміни температури навколишнього середовища; в) зміни перепаду тиску на щілині, що дроселює, золотникового гідророзподільника, при зміні величини навантаження на виконавчому механізмі (наприклад, силовому гідроциліндрі), керованим цим гідророзподільником. Якщо вплив фактора а) на зміну величини "зона нечутливості" може бути помітний лише після досить тривалого використання золотникового гідророзподільника, то фактори б) і, особливо, в) можуть значно змінювати величину "зони нечутливості" на протязі коротких проміжків часу в ту чи іншу сторону. Наприклад, під час запуску гідравлічного слідкувального привода робоча рідина має температуру 20°С, а після роботи на протязі декількох годин, вона може підвищитись до температури 50°С і більше. Через підвищення температури майже наполовину зменшується в'язкість робочої рідини (гідравлічного мастила), що приводить до зміни витратної характеристики золотника (Q, л/хв), а отже в наслідок цього час робочого ходу виконавчого механізму змінюється (в даному випадку зменшується). Теж саме, але з протилежним знаком відбувається під час охолодження робочої рідини холодним повітрям оточуючого середовища (особливо, восени або взимку), коли після вимикання гідравлічного слідкувального пристрою, що використовується, наприклад, на тракторі, робоча рідина значно охолоджується, а її в'язкість значно збільшується, що збільшує "зону нечутливості" золотника. Зміни перепаду тиску на золотниці можуть відбуватися дуже часто внаслідок зміни навантаження на виконавчому механізмі під час роботи гідравлічного привода і коливатись в значних межах. В залежності від цього також буде змінюватися в ту чи іншу сторону величина "зони нечутливості". Отже особливістю золотників з позитивним перекриттям як виконавчих елементів систем автоматичного керування є те, що вони мають "зону нечутливості", яка постійно змінюється в той чи інший бік під час роботи керуючої системи. Відомий спосіб компенсації люфту виконавчого пристрою [див. опис до авт.св. СРСР №243010, опубл. 23.09.1969, МПК: G05f] згідно з яким оцінюють знак похідної сигналу управління, формують із сигнала управління незалежно від його величини сигнал корекції, амплітуда якого постійна і рівна половині зони люфта, а полярність співпадає з полярністю похідної сигналу управління, і зміщують керуючий сигнал на вході виконавчого пристрою на величину сигналу корекції. Для здійснення цього способу використовується пристрій, принципова схема якого містить керуючий контур, вхід якого лінією прямого зв'язку з'єднаний з одним із входів суматора, а вихід якого з'єднаний з нелінійністю типу "люфт". Керуючий контур також містить корегуючий нелінійний пристрій, який установлений в паралельній лінії, яка з'єднує вхід керуючого контура з другим входом суматора. Для забезпечення компенсації люфта відомий пристрій потребує відповідний вибір параметрів системи, тобто корегуючий нелінійний пристрій повинен формувати заздалегідь визначений розміром люфта виконавчого елемента постійний за абсолютною величиною сигнал, який додатково до вхідного сигналу надходить на суматор зі знаком (+) або (-) в залежності від величини похідної вхідного сигналу в часі, а сигнал, що дорівнює сумі цих двох сигналів з ви хода суматора подається на нелінійність типа "люфт". Відомий пристрій не забезпечує точну компенсацію люфта виконавчого пристрою, якщо ширина люфта змінюється під час експлуатації. Також відомий пристрій для компенсації люфта виконавчого пристрою керуючої системи [див. опис до авт.св. СРСР №767698, опубл. 30.09.1980, М.кл.3 : G05В5/01], блок схема якого містить керуючий контур, вхід якого лінією прямого зв'язку з'єднаний з одним із входом суматора, вихід якого з'єднаний з виконавчим пристроєм, що має характеристику типа люфт з півзоною "b". В паралельній лінії, яка з'єднує вхід керуючого контура з другим входом суматора послідовно установлені вимірювач похідної за часом керуючого сигналу і формувач сигналу корекції. Формувач сигналу корекції має напівзону нечутливості "а", за швидкістю зміни похідної керуючого сигналу, яка дорівнює постійній величині (а » b), що залежить від конкретних характеристик виконавчого пристрою та інших елементів керуючої системи, а також від конкретних параметрів керованого об'єкту і визначається експериментально. Крім того, величина сформованого сигналу корекції повинна дорівнювати "заданій гранично допустимій ширині напівзони максимального значення люфта". Точність компенсації відомого пристрою для компенсації люфта виконавчого пристрою залежить від точного експериментального визначення всіх параметрів керуючої системи а також параметрів оточуючого середовища, і в разі не урахування або не точного урахування цих параметрів, заздалегідь в формувач сигналу корекції буде вноситися помилка. Відомий пристрій для компенсації люфта виконавчого пристрою керуючої системи забезпечує точн у компенсацію люфта лише коли люфт має своє максимальне значення і похідна керуючого сигналу перевищує полузону нечутливості формувальника сигнала корекції. У всіх інши х випадках має місце "недокомпенсація". Отже, як перший так і другий описані аналоги не можуть забезпечити достатню компенсацію нестабільної характеристики типа "зона нечутливості" виконавчого пристрою (елемента) керуючої системи у всьому діапазоні значень "зони нечутливості" і при всіх значеннях керуючого сигналу. Тому описані пристрої і способи не можуть забезпечити точного позиціювання виконавчого елемента високоточних слідкувальних приводів, якими є електрогідравлічні слідкувальні приводи, що містять золотники з позитивним перекриттям. Найближчим до винаходу, що заявляється, є відомий електрогідравлічний підсилювач - перетворювач [авт.св. СРСР №820339, М.кл.3: F15В3/00], що містить основний контур, лінія прямого зв'язку якого містить послідовно встановлені електричний суматор, підсилювач потужності, з виходом якого з'єднаний виконавчий механізм, що містить електромеханічний перетворювач і гідравлічно-з'єднаний з ним двома гідравлічними каналами гідравлічний підсилювач, що містить циліндричний золотник, який є об'єктом руху, що приводиться в дію від електромеханічного перетворювача за допомогою двох гідравлічних каналів, підведених до його торцевих порожнин. Лінія зворотного зв'язку містить з'єднаний з золотником датчик зворотного зв'язку за положенням золотника, який з'єднаний через підсилювач зворотного зв'язку безпосередньо з одним із входів суматора. Крім того, електрогідравлічна слідкувальна система містить додаткову паралельну лінію зворотного зв'язку, в якій установлений блок з зоною нечутливості, пропорціональний розміру робочого ходу об'єкта руху - золотника. Додаткова лінія зворотного зв'язку утворює ланцюг корекції, що з'єднує датчик зворотного зв'язку через вказаний блок з іншим (від'ємним) входом суматора. Вказаний блок, що установлений в додатковій лінії зворотного зв'язку, виконує функцію обмежувача сигналів, що відвертає удари рухомого елемента - золотника в його крайніх положеннях за рахунок його примусового релейного типу спрацьовуванню в його крайніх робочих положеннях. Оскільки в конструкції найближчого аналога електромеханічний перетворювач забезпечує гідравлічне керування об'єктом руху - золотником гідравлічного підсилювача, електромеханічний перетворювач фактично є електрогідравлічним перетворювачем, тобто пристроєм, який перетворює електричну енергію, що надходить до нього у вигляді керуючих си гналів, в енергію керуючих ви хідних гідравлічних потоків, що ви ходять з його гідравлічного каскаду і керують роботою золотника гідравлічного підсилювача. Спільним поняттям, що характеризує призначення об'єкта, що заявляється, і найближчого аналога є "Електрогідравлічний слідку вальний привод". Спільними ознаками винаходу, які збігаються з ознаками найближчого аналога, є наступна сукупність суттєвих ознак: "Електрогідравлічний слідкувальний привод, що містить основний контур, лінія прямого зв'язку якого містить послідовно встановлені електричний суматор, підсилювач потужності, з виходом якого з'єднаний виконавчий механізм, що містить електрогідравлічний перетворювач і гідравлічно-з'єднаний з ним об'єкт руху, а лінія зворотного зв'язку якого містить електричний датчик зворотного зв'язку за положенням об'єкта руху, з'єднаний з суматором, крім того електрогідравлічний слідкувальний привод містить нелінійний коригуючий елемент, який в свою чергу зв'язаний з електричним суматором". В разі використання в конструкції електрогідравлічного перетворювача вибраного аналога золотника з позитивним перекриттям як досить конструктивно простого виконавчого елемента, останній буде вносити у відомій електрогідравлічний слідкувальний привод, нелінійність типу "зона нечутливості". Тому такий електрогідравлічний слідкувальний і привод буде мати недостатню коригуючи здатність, незадовільну чутливість і малу точність його роботи. Додаткова лінія зворотного зв'язку, що присутня в конструкції найближчого аналога не може забезпечити усунення вказаних недоліків, так як блок з зоною нечутливості, який встановлений в додатковій лінії зворотного зв'язку, видає коригуючий сигнал, що подається на відповідний вхід суматора, тільки в моменти, коли золотник гідравлічного підсилювача виходить за його крайні робочі положення, тобто не відбувається корекція переміщення об'єкта руху на всьому його робочому ході. Щоб усун ути вказані недоліки необхідно створити такий слідкувальний привод, що включає елемент типу "зона нечутливості", який би мав таку коригуючу здатність, при якій величина корекції змінювалася б автоматично у повній відповідності із змінними в процесі роботи параметрами елементів приводу і який би при будь-якому відхиленні форми цієї кривої від ідеальної зміг би виключити негативний вплив нелінійності на чутливість приводу і точність переміщення виконавчого механізму. Технічною задачею винаходу, що заявляється, є створення електрогідравлічного слідкувального приводу, що містить виконавчий механізм з нестабільною не-лінійністю "зона нечутливості", з високою чутливістю спрацьовування для точної обробки заданого сигналу в широкому діапазоні регульованих значень. Поставлена технічна задача вирішується за допомогою електрогідравлічного слідкувального привода, що містить основний контур, лінія прямого зв'язку якого містить послідовно встановлені електричний суматор, підсилювач потужності, з виходом якого з'єднаний виконавчий механізм, що містить електрогідравлічний перетворювач і гідравлічно-з'єднаний з ним об'єкт руху, а лінія зворотного зв'язку якого містить електричний датчик зворотного зв'язку за положенням об'єкта руху, з'єднаний з суматором, крім того електрогідравлічний слідкувальний привод містить нелінійний коригуючий елемент, який в свою чергу зв'язаний з електричним суматором, в якому згідно з винаходом електрогідравлічний перетворювач виконаний як електрогідравлічний підсилювач з нелінійністю типу "зона нечутливості", яка обумовлена наявністю в його конструкції золотника з позитивним перекриттям, а нелінійний коригуючий елемент виконаний як підсилювач електронний з нелінійністю типу "насичення" і з'єднує між собою вихід електричного суматора і вхід підсилювача потужності, при цьому електрогідравлічний слідкувальний привод містить додатковий електричний суматор, який установлений в лінії зворотного зв'язку, при цьому електричний датчик зворотного зв'язку з'єднаний з негативним входом додаткового суматора, а вихід підсилювача електронного з нелінійністю типу "насичення" з'єднаний з позитивним входом додаткового електричного суматора, при цьому вихід додаткового суматора з'єднаний з окремим входом основного суматора. Завдяки такому виконанню електрогідравлічного слідкувального привода, він додатково до основної лінії зворотного зв'язку містить замкнений коригуючий контур, який утворений підсилювачем електронним з нелінійністю типу "насичення", установленого на виході основного суматора в спільній з основним контуром частині лінії прямого зв'язку і додатковим суматором, установленим в частині лінії зворотного зв'язку, що з'єднує датчик зворотного зв'язку з основним суматором. Це створює умови для безперешкодного проходження повного сигналу корекції на основний суматор, з другого боку це дає можливість регулювати сигнал корекції навіть при нестабільній зоні нечутливості. Крім того, використання в запропонованому пристрої електричних суматорів дозволяє зменшити час дії максимального сигналу завдяки збільшенню швидкості спрацьовування коригуючого контуру і короткочасності подачі на виконавчий механізм максимального сигналу, здатного компенсувати його нелінійність. Зазначена сукупність ознак запропонованого пристрою дає змогу регулюва ти корекцію, яка в автоматичному режимі роботи дозволяє нівелювати існуючу нелінійність і, тим самим, поліпшити коригуючу здатність електрогідравлічного слідкувального привода, підвищити його чутливість і точність роботи в широкому діапазоні регульованих значень, а також розширити функціональні можливості цього привода. Підсилювач електронний з нелінійністю типу "насичення" має величину амплітуди ви ходу більше половини зони нечутливості. Це дозволяє збільшити коригуючий сигнал і привести його у відповідність з величиною зони нечутливості шляхом вироблення сигналу, достатнього для спрацьовування виконавчого елемента з нелінійністю типу "зона нечутливості", який має обмежену амплітуду, що дозволяє виключити його перевантаження. Більш детально даний винахід описаний нижче з посиланням на креслення Фіг.1-Фіг.4, які додаються. На Фіг.1 зображена принципова блок-схема електрогідравлічного слідкувального приводу; на Фіг.2 - схема золотника з позитивним перекриттям; на Фіг.3 - витратні характеристики золотника з позитивним перекриттям (зоною нечутливості) при різних значеннях перепаду тиску на кромках золотника; на Фіг.4 - витратні характеристики золотника з позитивним перекриттям (зоною нечутливості) при різних значеннях в'язкості робочої рідини (гідравлічного мастила). Електрогідравлічний слідкувальний привод містить два замкнуті контури слідкування - основний і коригуючий. Лінія прямого зв'язку основного контур у містить послідовно з'єднані між собою основний електричний суматор 1, підсилювач електронний 2 з нелінійністю типу "насичення", підсилювач потужності 3 і виконавчий механізм 4, який утворений електрогідравлічним підсилювачем 5 з нелінійністю типу "зона нечутливості", яка обумовлена наявністю в його конструкції золотника з позитивним перекриттям, і об'єкт руху 6, яким може бути, наприклад, гідроциліндр, а лінія зворотного зв'язку містить електричний датчик 7 зворотного зв'язку за положенням об'єкта руху (гідроциліндра), а також додатковий електричний суматор 8, один із входів якого з'єднаний з виходом електричного датчика 7, а його вихід з'єднаний з входом основного суматора 1. Крім того, вихід підсилювача електронного 2 з нелінійністю типу "насичення" з'єднаний з входом додаткового суматора 8. Коригуючий контур слідкування утворений завдяки замикання виходу підсилювача електронного 2 з нелінійністю типу "насичення" лінії прямого зв'язку через додатковий суматор 8 лінії зворотного зв'язку на основний суматор 1. В основному контурі слідкування здійснюється принцип "негативного зворотного зв'язку", оскільки вихід електричного датчика 7 зворотного зв'язку за положенням об'єкта руху через інвертуючий вхід додаткового суматора 8 з'єднаний з основним суматором 1. В коригуючому контурі здійснюється принцип "позитивного зворотного зв'язку", так як підсилювач електронний 2 з нелінійністю типу "насичення" установлений на виході основного суматора 1, і його вихід через додатковий суматор 8 зв'язаний з позитивним входом основного суматора 1. Електрогідравлічний підсилювач 5 має золотниковий каскад з позитивним перекриттям робочих вікон, що обумовлює наявність нелінійності типу "зона нечутливості" Δх (див. Фіг.2). На Фіг.2 схематично зображено циліндричний золотник 9, що має зовнішній діаметр dз і діаметр шийки dш. Золотник має позитивне перекриття за рахунок того, що ширина "b" ущільнюваючого пояска 10 золотника більше ніж ширина "с" вікна 11 втулки 12 золотника. В наслідок цього золотник має зону нечутливості Δх, яка дорівнює: Δх=½·(в-с). Під час роботи ширина зони нечутливості кривої залежності витрат Q робочої рідини від зміщення X золотника і її характер можуть змінюватися під дією тиску (перепаду тиску на кромках золотника), внаслідок зміни температури робочої рідини (гідравлічного мастила), що приводить до зміни її в'язкості, або в наслідок природного зносу золотника і втулки, що зменшує величину позитивного пере-риття золотника. На Фіг.3 зображені криві залежності витрат Q робочої рідини через золотник від величини X його зміщення при різних значеннях тиску робочої рідини: максимальному - Рmах, номінальному - Рном і мінімальному - Pmin. Як видно з кривих, зображених на Фіг.3, ширина зони нечутливості Δх зростає на Δх1 при зменшенні тиску робочої рідини від максимального значення до мінімального значення. На Фіг.4 зображені криві залежності витрат Q робочої рідини через золотник від величини X його зміщення при різних значеннях в'язкості μ робочої рідини, яка може змінюватися під час роботи внаслідок зміни її температури від її мінімального значення μmin (при найбільшому робочому значенні температури робочої рідини) до її максимального значення μmax (при найменшому робочому значенні температури робочої рідини). Як видно з кривих, зображених на Фіг.4, ширина зони нечутливості Δх може зростати на Δх2 внаслідок зміни в'язкості робочої рідини під впливом зміни її температури. Температура робочої рідини (гідравлічного мастила) може змінюватися як під впливом зміни температури оточуючого середовища, так і в наслідок внутрішнього тертя робочої рідини під час її дроселювання через золотник. Отже золотниковий каскад електрогідравлічного підсилювача 4 має нестабільні характеристики "зони нечутливості", які постійно змінюються в ту чи іншу сторону на протязі роботи електрогідравлічного слідку вального пристрою. У зв'язку з цим, електрогідравлічний слідкувальний пристрій повинен забезпечувати під час роботи компенсацію нелінійності типу "зона нечутливості" при різних значеннях її нестабільних характеристик. Електрогідравлічний слідку вальний привод працює наступним чином. Вхідний сигнал U подають на основний суматор 1, який з виходу основного суматора поступає на вхід підсилювача електронного 2 з нелінійністю типу "насичення", перетворюється в ньому, і по лінії прямого зв'язку поступає на підсилювач потужності 3 і одночасно через ланцюг коригуючого контуру - на додатковий суматор 8 і далі на основний суматор 1. Вхідний сигнал U проходячи через суматор 1, підсилювач електронний 2 і підсилювач потужності 3, формує на виході останнього посилений сигнал J, який надходить на вхід електрогідравлічного підсилювача 5 з нелінійністю типу "зона нечутливості". При цьому, якщо величина сигналу J, який надходить з виходу підсилювача потужності 3 на електрогідравлічний підсилювач 5 з нелінійністю "зона нечутливості" менше половини ширини "зони нечутливості", то сигнал через електрогідравлічний підсилювач 5 не може пройти і, отже, він не потрапляє на об'єкт руху 6. В той же час для перетвореного в підсилювачі електронному 2 сигналу U K відкритий шлях через коригуючий контур на додатковий суматор 8, з якого він потрапляє на основний суматор 1, додаючись до вхідного сигналу U завдяки позитивному зворотному зв'язку. Так відбуватиметься до тих пір, поки величина сигналу J не стане більше половини ширини "зони нечутливості". Після чого об'єкт 6 почне рухатись, і на електричному датчику 7 з'явиться пропорційний величині зміщення об'єкту р уху 6 сигнал UД, який надходить на інвертуючий вхід додаткового суматора 8, і потім завдяки наявності негативного зворотного зв'язку він віднімається від сигналу корекції U K, що надходить на суматор 8 з виходу підсилювача електронного 2. Таким чином роботу електрогідравлічного слідкувального приводу можна розділити на два періоди: - від моменту надходження вхідного сигналу на основний суматор до початку зміщення об'єкту р уху; - від початку зміщення об'єкту р уху до повної його зупинки. В першому періоді залежно від величини вхідного сигналу U можуть бути два варіанти роботи електрогідравлічного слідкувального приводу: а) коли величина вхідного сигналу U достатня для формування на виході підсилювача потужності З, а відповідно і на вході електрогідравлічного підсилювача 5 з нелінійністю типу "зона нечутливості" сигналу J, який більше ширини "зони нечутливості", і тоді електрогідравлічний підсилювач перетворює електричний сигнал J в гідравлічний сигнал Q (витрати робочої рідини через вікно золотника з позитивним перекриттям, л/хвилину), який відразу надходить на об'єкт руху 6 (гідроциліндр), і зміщує його; б) величина вхідного сигналу U є недостатньою для формування на виході підсилювача потужності 3, сигналу J, який більше ширини "зони нечутливості" (тобто, величина вхідного сигналу U не забезпечує утворення сигналу J, який є достатнім для спрацьовування гідравлічного елемента (золотника з позитивним перекриттям), що має "зону нечутливості", електрогідравлічного підсилювача 5 з нелінійністю типу "зона нечутливості"), і тоді коригуючий контур, за рахунок його позитивного зворотного зв'язку з коефіцієнтом передачі, близьким до 1, нарощує цей сигнал і величину сигналу корекції U K при багаторазовому проходженні сигналу по коригуючому контуру через додатковий суматор 8 і додаванні його до вхідного сигналу на основному суматорі 1. Через n циклів сигнал корекції стане рівним: UK=(n+1)·U Як тільки амплітуда сигналу UK зросте до величини, достатньої для формування величини сигналу J більше половини "зони нечутливості", електрогідравлічний слідкувальний привод починає працювати по варіанту а) першого періоду. Далі починається другий період роботи електрогідравлічного слідкувального приводу, який однаковий для будь-якого варіанта роботи у першому періоді. Як тільки на виході електрогідравлічного підсилювача 5, що має нелінісність типу "зона нечутливості" з'являються витрати робочої рідини Q, об'єкт руху 6 (гідроциліндр) починає переміщатись зі швидкістю пропорційної цим витратам. При зміні координати X, тобто положення об'єкта руху (штока гідроциліндра), на датчику 7 зворотного зв'язку за положенням об'єкта руху з'являється сигнал UД, який на додатковому суматорі 8 віднімається від сигнала корекції UK, зменшує його, і тому на основний суматор 1 приходить сигнал зменшеної амплітуди. Цей сигнал передається на електрогідравлічний підсилювач 5, зменшуючи витрати робочої рідини і, отже, швидкість руху штока гідроциліндра (об’єкта руху 6). В наслідок багаторазового повторення цього процесу сигнал UД стає рівним вхідному сигналу U, і тоді рух штока циліндра припиняється. Оскільки при використанні електричних суматорів і інших елементів приводу швидкість нарощування і зменшення сигналу дуже висока, кінцева ланка виконавчого механізму 4, тобто шток гідроциліндра, підходить до своєї рівноважної точки з малою швидкістю, не прослизаючи її, що забезпечує високу точність зупинки його в заданому положенні. При цьому дія на лінійний елемент типу "зона нечутливості" повинна бути регульованою і особливо плавно змінюватися при проходженні точки перегину характеристичної кривої нелінійного елемента типу "зона нечутливості", оскільки в цій точці є стрибок прискорення. Регулюючу роль виконує як нелінійній елемент типу "насичення", так і коригуючий контур у цілому. Регулююча роль нелінійного елемента типу "насичення" в електрогідравлічному слідкувальному приводі, що заявляється, полягає в підтримці необхідного для спрацьовування нелінійного елемента типу "зона нечутливості" рівня сигналу корекції відповідної полярності, тоді як ланцюг корекції в цілому регулює сигнал корекції таким чином, щоб виникаюча в системі за рахунок нелінійного елемента типу "зона нечутливості" помилка регулювання автоматично зводилася б до нуля, тобто схема працювала б так, як ніби нелінійний елемент в ній відсутній. Таким чином, в технічному рішенні, що заявляється, вдалося виключити небажаний вплив нелінійного елемента на чутливість електрогідравлічного слідкувального приводу і на точність його роботи, що дозволило значно поліпшити ці параметри, а також розширити діапазон регулювання ланцюга корекції, так і приводу в цілому. Крім того, унаслідок поліпшення плавності ходу виконавчого механізму підвищується довговічність приводу, а також знижуються енерговитрати.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectro-hydraulic follower drive
Назва патенту російськоюЭлектрогидравлический следящий привод
МПК / Мітки
Мітки: слідкувальний, привід, електрогідравлічний
Код посилання
<a href="https://ua.patents.su/5-78766-elektrogidravlichnijj-slidkuvalnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний слідкувальний привід</a>
Слідкувальний електричний рульовий привід

Номер патенту: 73793
Опубліковано: 15.09.2005
Автори: Егліт Микола Олександрович, Бондарчук Павло Степанович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Хіміч Світлана Іллівна, Шепелєв Юрій Іванович, Доценко Борис Іванович
МПК: F42B 15/01
Мітки: привід, рульовий, слідкувальний, електричний
Формула / Реферат:
Слідкувальний електричний рульовий привід, що містить послідовно з'єднані підсилювач-суматор, який має керуючий вхід, коригуючу ланку, підсилювач потужності, вихід якого підключений до виконавчого двигуна, редуктор і датчик зворотного зв'язку, причому вихід датчика зворотного зв'язку підключений до другого входу підсилювача-суматора, який відрізняється тим, що до нього введені послідовно з'єднані перший фільтр низьких частот, аперіодична...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Нарожний Віталій Васильович, Кулік Анатолій Степанович, Лученко Олег Олексійович, Фірсов Сергій Миколайович, Таран Олександр Миколайович
МПК: F15B 9/00
Мітки: привід, електрогідравлічний, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Лученко Олег Олексійович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Фірсов Сергій Миколайович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привід
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який...
Електрогідравлічний слідкуючий привід
Номер патенту: 67680
Опубліковано: 15.06.2004
Автори: Лученко Олег Олексійович, Биков Анатолій Васильович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Нарожний Віталій Васильович
МПК: F15B 9/00
Мітки: електрогідравлічний, привід, слідкуючий
Формула / Реферат:
Електрогідравлічний слідкуючий привід, який складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, суматорів, блока поділу, корегувального пристрою, нелінійних блоків і релейного елемента, який відрізняється тим, що в...
Слідкуючий електрогідравлічний привід
Номер патенту: 13538
Опубліковано: 17.04.2006
Автори: Кальченко Олег Володимирович, Фірсов Сергій Миколайович, Бандура Іван Миколайович, Нарожний Віталій Володимирович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привід
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що містить гідравлічно з'єднані реверсивно регульований насос і виконавчий гідроциліндр з датчиком положення його штока, підключений через перший і другий суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака й клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика споживаного струму, обмежника-формувача,...
Попередній патент: Двигун внутрішнього згоряння з безшатунним механізмом
Наступний патент: Спосіб і пристрій для етерифікації жирних кислот
Випадковий патент: Інгібітори вірусної реплікації