Слідкувальний електричний рульовий привід
Номер патенту: 73793
Опубліковано: 15.09.2005
Автори: Яковенко Петро Олексійович, Хіміч Світлана Іллівна, Бондарчук Павло Степанович, Кузьмін В'ячеслав Павлович, Шепелєв Юрій Іванович, Доценко Борис Іванович, Егліт Микола Олександрович

Формула / Реферат
Слідкувальний електричний рульовий привід, що містить послідовно з'єднані підсилювач-суматор, який має керуючий вхід, коригуючу ланку, підсилювач потужності, вихід якого підключений до виконавчого двигуна, редуктор і датчик зворотного зв'язку, причому вихід датчика зворотного зв'язку підключений до другого входу підсилювача-суматора, який відрізняється тим, що до нього введені послідовно з'єднані перший фільтр низьких частот, аперіодична ланка, пристрій порівняння, що має два входи, другий фільтр низьких частот, пропорційно-інтегро-диференціальний регулятор, блок-обмежувач, вихід якого з'єднаний з третім входом підсилювача-суматора, причому вхід першого фільтра низьких частот підключений до керуючого входу підсилювача-суматора, перший вхід пристрою порівняння підключений до виходу аперіодичної ланки, а другий вхід пристрою порівняння з'єднаний з виходом датчика зворотного зв'язку.
Текст
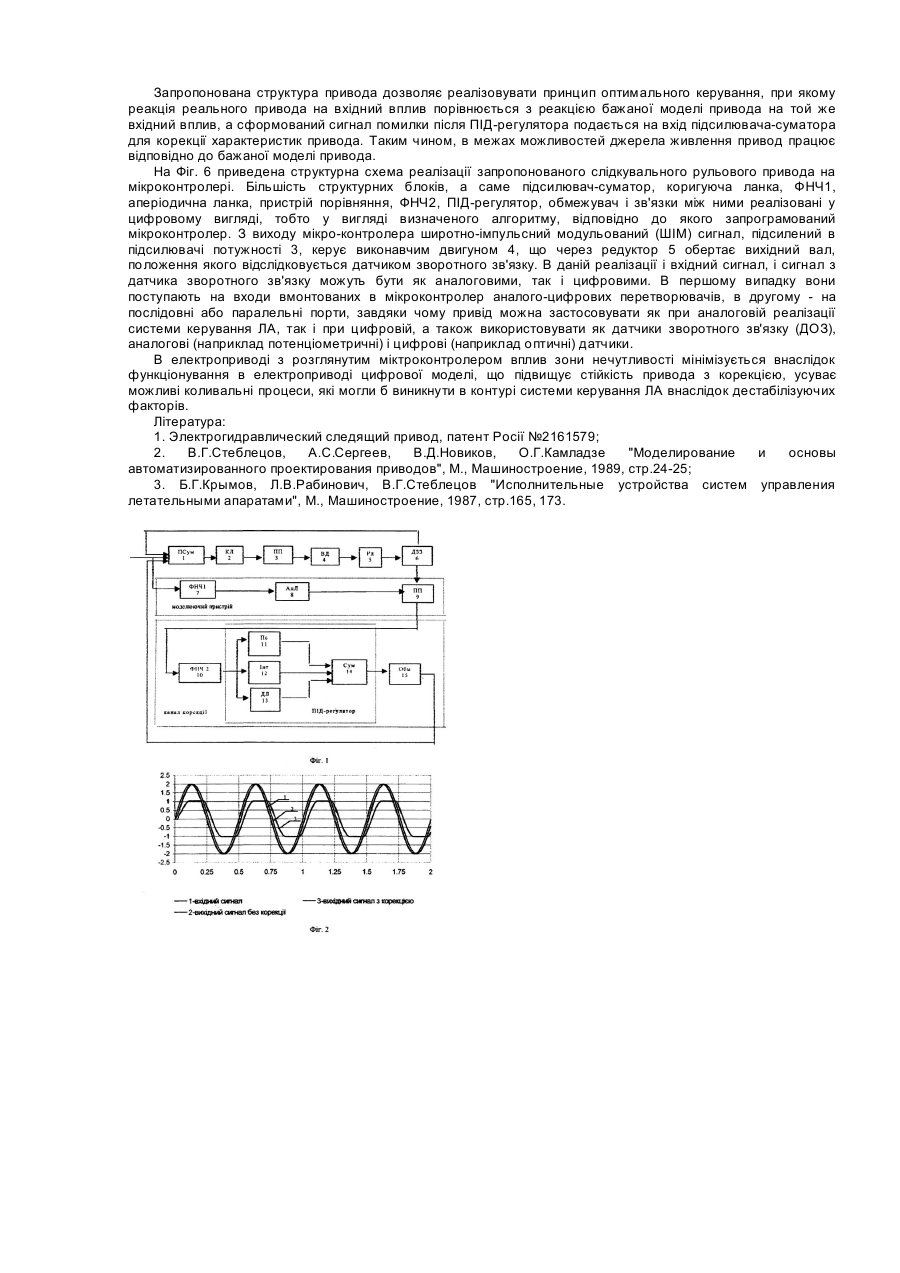
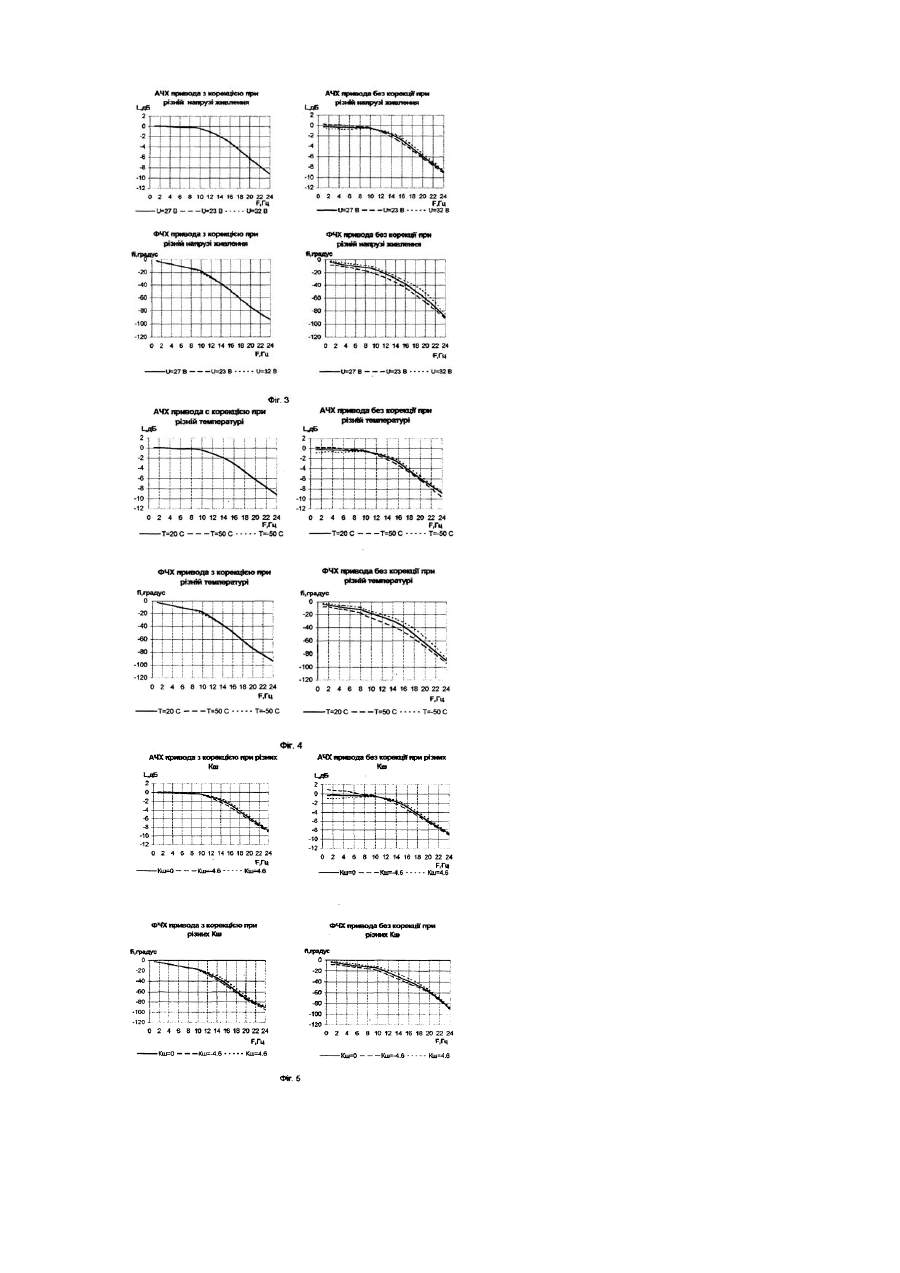
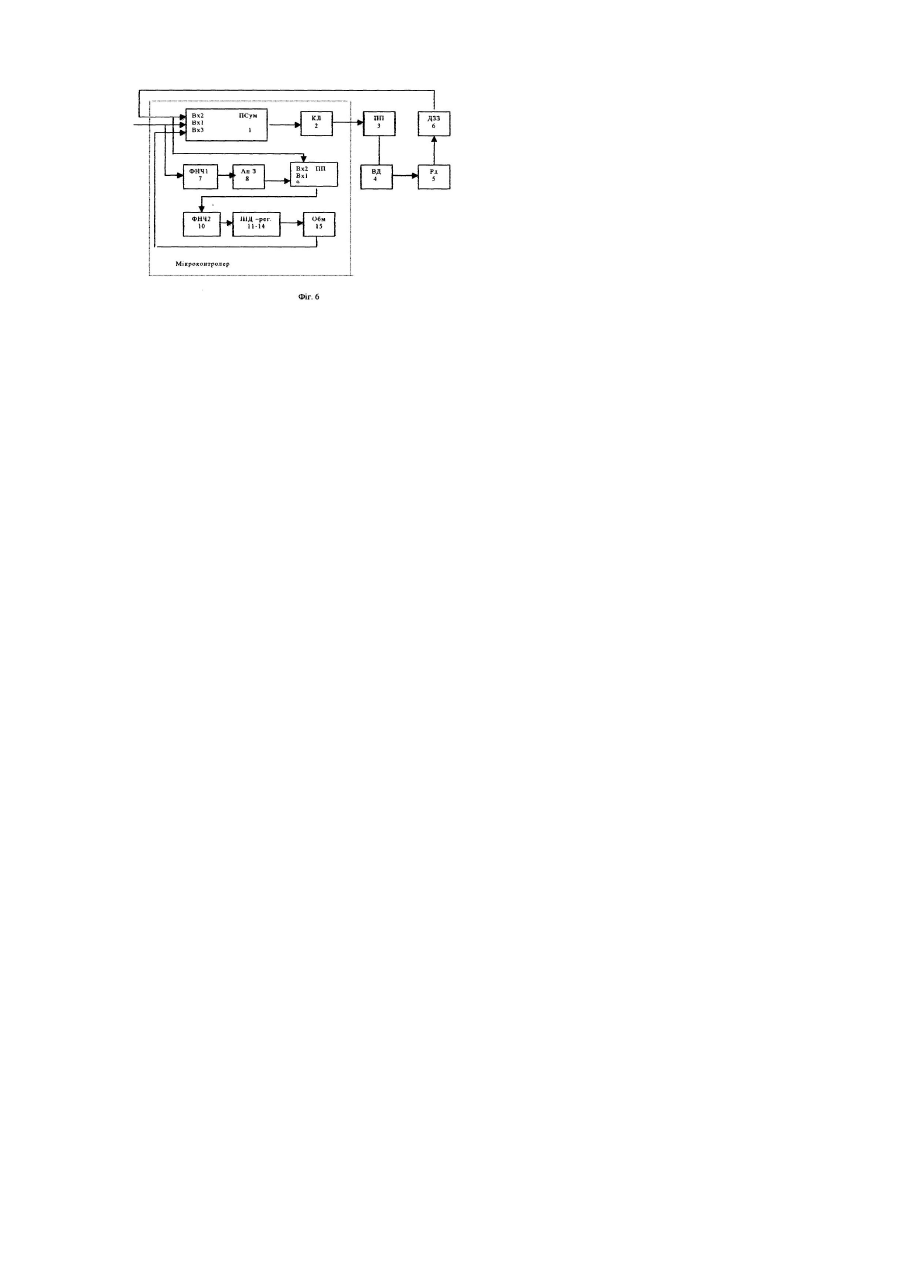
Винахід відноситься до ракетної техніки, зокрема до електричних рульових приводів, призначених для використання у високоточних системах керування, наприклад, в системах керування безпілотними літальними апаратами (ЛА). , Відомий слідкувальний електрогідравлічний привід [1], що містить канал керування, моделюючий пристрій і канал корекції. В приводі забезпечується відтворення динамічних керуючих впливів за рахунок введення моделюючого пристрою і каналу корекції. Недоліком є те, що параметри моделюючого пристрою враховують зміни динамічних характеристик привода в процесі експлуатації, що може привести до втрати стійкості каналу керування ЛА в процесі польоту. Крім того, застосування електрогідравлічного рульового привода на безпілотному літальному апараті досить складна технічна задача. Відомий електричний рульовий привід [2], що містить в каналі керування типовий замкнутий контур положення, який складається з послідовно з'єднаних підсилювача-суматора, підсилювача потужності, потенціометра зворотного зв'язку, розташованого на вихідному валу привода, сигнал з якого надходить на другий вхід підсилювача-суматора [2]. Недоліками такого привода є: 1) велика статична помилка навантаженого привода, 2) можливість виникнення автоколивань, 3) істотний вплив зони нечутливості й інших нелінійностей на форму вихідного сигналу, 4) істотна залежність характеристик привода від впливу нестабільних конструктивно-технологічних і експлуатаційних факторів. Найбільш близьким технічним рішенням до передбачуваного винаходу прототипом є електричний рульовий привід [3], до складу якого входять підсилювач-суматор, що має керуючий вхід, коригуючу ланку, підсилювач потужності, виконавчий двигун, редуктор, потенціометр зворотного зв'язку, вихід якого підключений до другого входу підсилювача-суматора, в якому задача поліпшення і стабілізації динамічних характеристик привода вирішується за рахунок введення коригуючої ланки для формування заданого закону керування виконавчим двигуном. Однак такий привід має недостатньо широку смугу пропускання керуючих сигналів, характеризується недостатньою точністю при відтворенні динамічних керуючих впливів і не може забезпечити необхідну якість процесів в високоточних системах керування безпілотними літальними апаратами. У розглянутому прототипі засоби корекції не забезпечують стабілізацію характеристик привода в широкому діапазоні, тому що не враховують непередбачені зміни параметрів і динамічних характеристик привода в процесі експлуатації, що може привести до втрати стійкості системи керування ЛА в процесі функціонування. Технічною задачею даного винаходу є стабілізація динамічних характеристик електричного рульового привода в умовах впливу дестабілізуючих факторів і зовнішніх впливів і підвищення точності функціонування електричного рульового привода шляхом введення пристрою, що відтворює бажану передаточну функцію привода в зоні необхідної смуги пропускання керуючих сигналів, пристрою порівняння і каналу корекції, який представляє собою пропорційно-інтегро-диференціальний (ПІД) регулятор, що дозволяє забезпечити зменшення статичної помилки навантаженого привода, виключити можливість виникнення автоколивань, зменшити вплив зони нечутливості на форму вихідного сигналу, а також знизити залежність характеристик привода від впливу конструктивно-технологічних факторів. На Фіг.1 показана структурна схема запропонованого слідкувального рульового привода. Привод містить підсилювач-суматор 1, коригуючи ланку 2, підсилювач потужності З, виконавчий двигун 4 і редуктор 5, датчик зворотного зв'язку 6, моделюючий пристрій, що включає перший фільтр низьких частот 7, аперіодичну ланку 8, пристрій порівняння 9 і канал корекції, до якого входять другий фільтр низьких частот 10, підсилювач 11, інтегратор 12, диференціальну ланку 13, суматор 14, обмежувач 15. Робота привода здійснюється наступним чином. Керуючий сигнал подається на перший керуючий вхід підсилювача-суматора 1, на інверсний вхід якого подається сигнал з датчика зворотного зв'язку 6, пропорційний куту повороту вихідного вала привода. Сформований сигнал помилки через коригуючу ланку 2 поступає на підсилювач потужності 3, з виходу якого напруга живлення подається на виконавчий двигун 4, з'єднаний через редуктор 5 з вихідним валом привода. Одночасно з цим керуючий сигнал поступає на фільтр низьких частот моделюючого пристрою 7, аперіодичну ланку 8, що є бажаною моделлю привода, і на вхід пристрою порівняння 9, на другий вхід якого поступає сигнал з датчика зворотного зв'язку. Пристрій порівняння формує сигнал помилки, що поступає на другий фільтр низьких частот 10 каналу корекції і на ПІД-регулятор 11, 12, 13, 14, а через обмежувач 15 - на третій вхід підсилювача-суматора 1. Таким чином на виході каналу корекції формується напруга корекції, яка зводить до нуля сигнал помилки на виході пристрою порівняння 9. За рахунок введення бажаної моделі привода і ПІДрегулятора в запропонованому електроприводі здійснюється лінеаризація структури привода, і вплив зони нечутливості і інших нелінійностей мінімізується внаслідок впливу на робочі процеси в електроприводі його моделі. Це дає можливість одержати бажані динамічні характеристики привода незалежно від розкиду параметрів двигуна і схеми керування. Ефективність такого привода підтверджується результатами математичного моделювання. На Фіг.2 приведені графіки зміни вихідного сигналу датчика зворотного зв'язку при наявності і відсутності каналу корекції при малому вхідному сигналі і ширині лінійної зони, порівняний з керуючим сигналом. Із графіків видно, що форма вихідного сигналу датчика зворотного зв'язку при наявності корекції не відрізняється від вхідного сигналу, суттєво зменшується статистична помилка і фазове запізнення. На Фіг.3-5 приведені графіки амплітудно-частотних і фазочастотних характеристик привода при відсутності і наявності каналу корекції для різних значень напруги живлення, температури навколишнього середовища і коефіцієнта шарнірного моменту зовнішнього напруження. Графіки показують, що з введенням запропонованого каналу корекції розкид амплітудно-частотних і фазочастотних характеристик суттєво зменшується і мало залежить від зміни вказаних дестабілізуючих факторів. Запропонована структура привода дозволяє реалізовувати принцип оптимального керування, при якому реакція реального привода на вхідний вплив порівнюється з реакцією бажаної моделі привода на той же вхідний вплив, а сформований сигнал помилки після ПІД-регулятора подається на вхід підсилювача-суматора для корекції характеристик привода. Таким чином, в межах можливостей джерела живлення привод працює відповідно до бажаної моделі привода. На Фіг. 6 приведена структурна схема реалізації запропонованого слідкувального рульового привода на мікроконтролері. Більшість структурних блоків, а саме підсилювач-суматор, коригуюча ланка, ФНЧ1, аперіодична ланка, пристрій порівняння, ФНЧ2, ПІД-регулятор, обмежувач і зв'язки між ними реалізовані у цифровому вигляді, тобто у вигляді визначеного алгоритму, відповідно до якого запрограмований мікроконтролер. З виходу мікро-контролера широтно-імпульсний модульований (ШІМ) сигнал, підсилений в підсилювачі потужності 3, керує виконавчим двигуном 4, що через редуктор 5 обертає вихідний вал, положення якого відслідковується датчиком зворотного зв'язку. В даній реалізації і вхідний сигнал, і сигнал з датчика зворотного зв'язку можуть бути як аналоговими, так і цифровими. В першому випадку вони поступають на входи вмонтованих в мікроконтролер аналого-цифрових перетворювачів, в другому - на послідовні або паралельні порти, завдяки чому привід можна застосовувати як при аналоговій реалізації системи керування ЛА, так і при цифровій, а також використовувати як датчики зворотного зв'язку (ДОЗ), аналогові (наприклад потенціометричні) і цифрові (наприклад оптичні) датчики. В електроприводі з розглянутим міктроконтролером вплив зони нечутливості мінімізується внаслідок функціонування в електроприводі цифрової моделі, що підвищує стійкість привода з корекцією, усуває можливі коливальні процеси, які могли б виникнути в контурі системи керування ЛА внаслідок дестабілізуючих факторів. Література: 1. Электрогидравлический следящий привод, патент Росії №2161579; 2. В.Г.Стеблецов, А.С.Сергеев, В.Д.Новиков, О.Г.Камладзе "Моделирование и основы автоматизированного проектирования приводов", М., Машиностроение, 1989, стр.24-25; 3. Б.Г.Крымов, Л.В.Рабинович, В.Г.Стеблецов "Исполнительные устройства систем управления летательными апаратами", М., Машиностроение, 1987, стр.165, 173.
ДивитисяДодаткова інформація
Назва патенту англійськоюFollower electric steering gear
Автори англійськоюYakovenko Petro Oleksiiovych, Dotsenko Borys Ivanovych, Kuzmin Viacheslav Pavlovych, Shepelev Yurii Ivanovych, Ehlit Mykola Oleksandrovych, Bondarchuk Pavlo Stepanovych
Назва патенту російськоюСледящий электрический рулевой привод
Автори російськоюЯковенко Петр Алексеевич, Доценко Борис Иванович, Кузьмин Вячеслав Павлович, Шепелев Юрий Иванович, Эглит Николай Александрович, Бондарчук Павел Степанович
МПК / Мітки
МПК: F42B 15/01
Мітки: рульовий, привід, електричний, слідкувальний
Код посилання
<a href="https://ua.patents.su/4-73793-slidkuvalnijj-elektrichnijj-rulovijj-privid.html" target="_blank" rel="follow" title="База патентів України">Слідкувальний електричний рульовий привід</a>
Слідкувальний привід поступального руху

Номер патенту: 71258
Опубліковано: 15.11.2004
Автори: Владимиров Анатолій Юрієвич, Ковальов Віктор Дмитрович, Бабін Олег Фавієвич, Мельник Максим Сергійович
МПК: B21B 38/00
Мітки: руху, привід, поступального, слідкувальний
Формула / Реферат:
Слідкувальний привід поступального руху, що містить двигун обертального руху, передачу гвинт-гайка, з'єднану з двигуном обертального руху, виконавчий орган, датчик зворотного зв'язку, задавальний пристрій, порівнювальний пристрій і підсилювач, який відрізняється тим, що виконавчий орган з'єднано з якорем лінійного двигуна постійного струму, корпус якого з'єднано з гайкою передачі, причому лінійний двигун керується через підсилювач сигналом...
Електричний фільтр
Номер патенту: 47878
Опубліковано: 15.07.2002
Автори: Бородин Андрій Андрійович, Філіпський Юрій Костянтинович
МПК: H03H 7/01
Мітки: фільтр, електричний
Формула / Реферат:
Електричний фільтр, що містить послідовно з'єднані широкосмуговий підсилювач, елемент затримки та основний суматор, вихід якого підключено до виходу пристрою, який відрізняється тим, що в нього введені селективний фільтр та додатковий суматор, при цьому вхід селективного фільтра підключено до входу пристрою, вихід селективного фільтра підключено до першого входу додаткового суматора та до входу широкосмугового підсилювача, вихід...
Рульовий привід
Номер патенту: 41472
Опубліковано: 17.09.2001
Автори: Куріленко Олександр Васильович, Холковський Віктор Семенович
МПК: B62D 3/00
Формула / Реферат:
Рулевой привод выполненный в виде рулевой трапеции, где основанием трапеции служит балка и поперечная тяга, выполненная в виде цельного или расчлененного трубчатого стержня с наружными шарнирами по концам, каждый из которых связан с поворотным рычагом управляемого колеса отличающийся тем, что компановка рулевого привода включает кулачковый механизм, являющийся поперечной тягой рулевой трапеции, выполненной из удлиненного кулачка с двумя...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Кулік Анатолій Степанович, Таран Олександр Миколайович, Лученко Олег Олексійович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Рульовий привід транспортної іграшки-тренажера

Номер патенту: 50731
Опубліковано: 15.11.2002
Автор: Охримович Роман Володимирович
МПК: A63H 17/00
Мітки: рульовий, привід, іграшки-тренажера, транспортної
Формула / Реферат:
1. Рульовий привід транспортної іграшки-тренажера, що містить керовані ходові колеса з важелями, шарнірно з’єднаними з рульовою трапецією, і зубчасту передачу, який відрізняється тим, що привідна шестірня зубчастої передачі з’єднана просторовим шарніром з валом рульового колеса, віддаленого цим валом за тильну частину іграшки-тренажера.2. Рульовий привід транспортної іграшки-тренажера по п. 1, який відрізняється тим, що привідна...
Попередній патент: Гідростатичний привід сільськогосподарської машини
Наступний патент: Спосіб моделювання цукрового предіабету
Випадковий патент: Стрічковий живильник вишивальної машини з багатоголковими головками