Гіротеодоліт
Номер патенту: 81188
Опубліковано: 25.06.2013
Автори: Мураховський Сергій Анатолійович, Сапегін Олександр Миколайович


Формула / Реферат
Гіротеодоліт, який містить корпус, всередині якого підвішено гіроскопічний маятниковий чутливий елемент, всередині якого розміщено асинхронний гіромотор, обладнаний системою стабілізації обертання, який відрізняється тим, що гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кутової швидкості системи стабілізації обертання гіромотора, і в якому визначаються оцінки кута та кутової швидкості повороту чутливого елемента відносно головної осі.
Текст
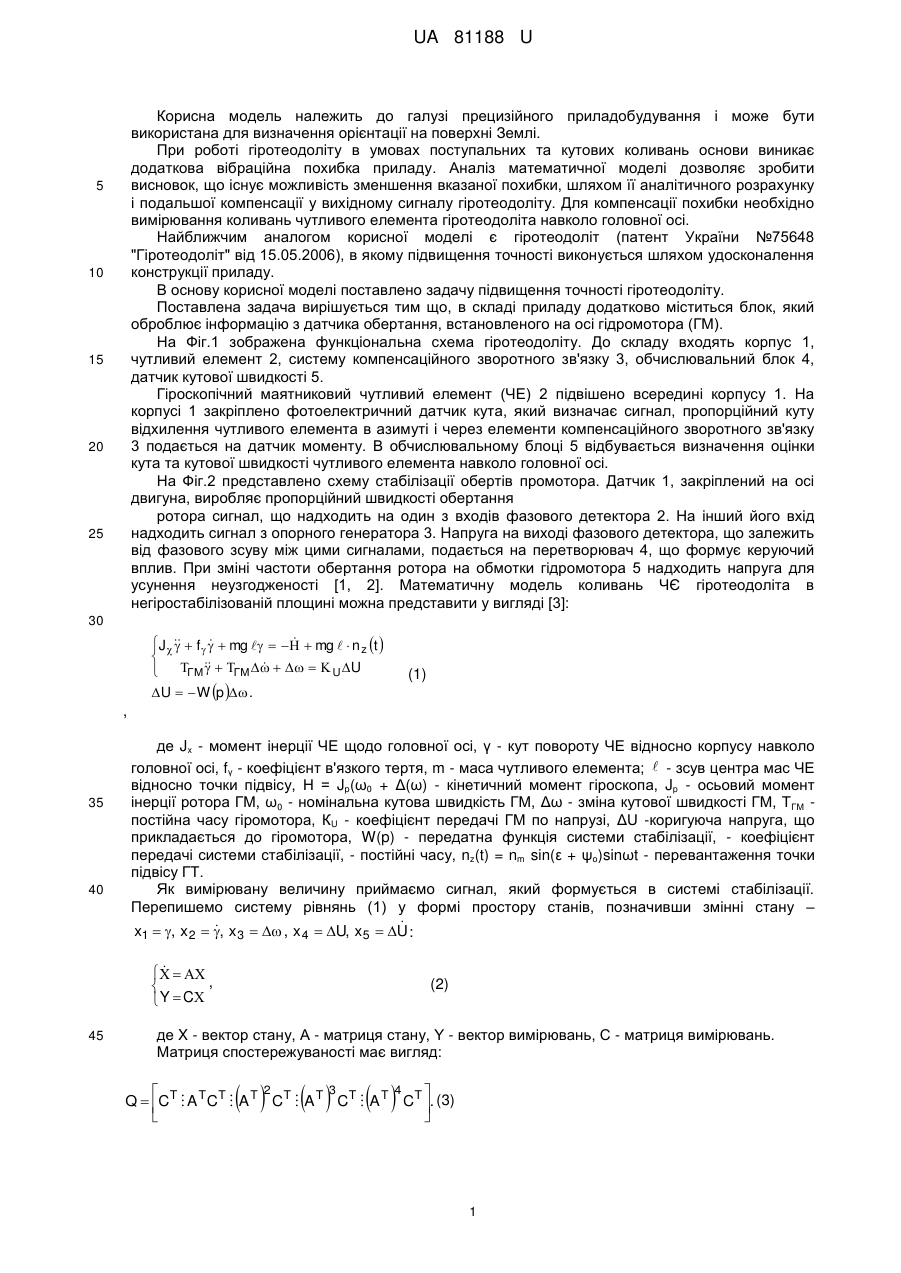
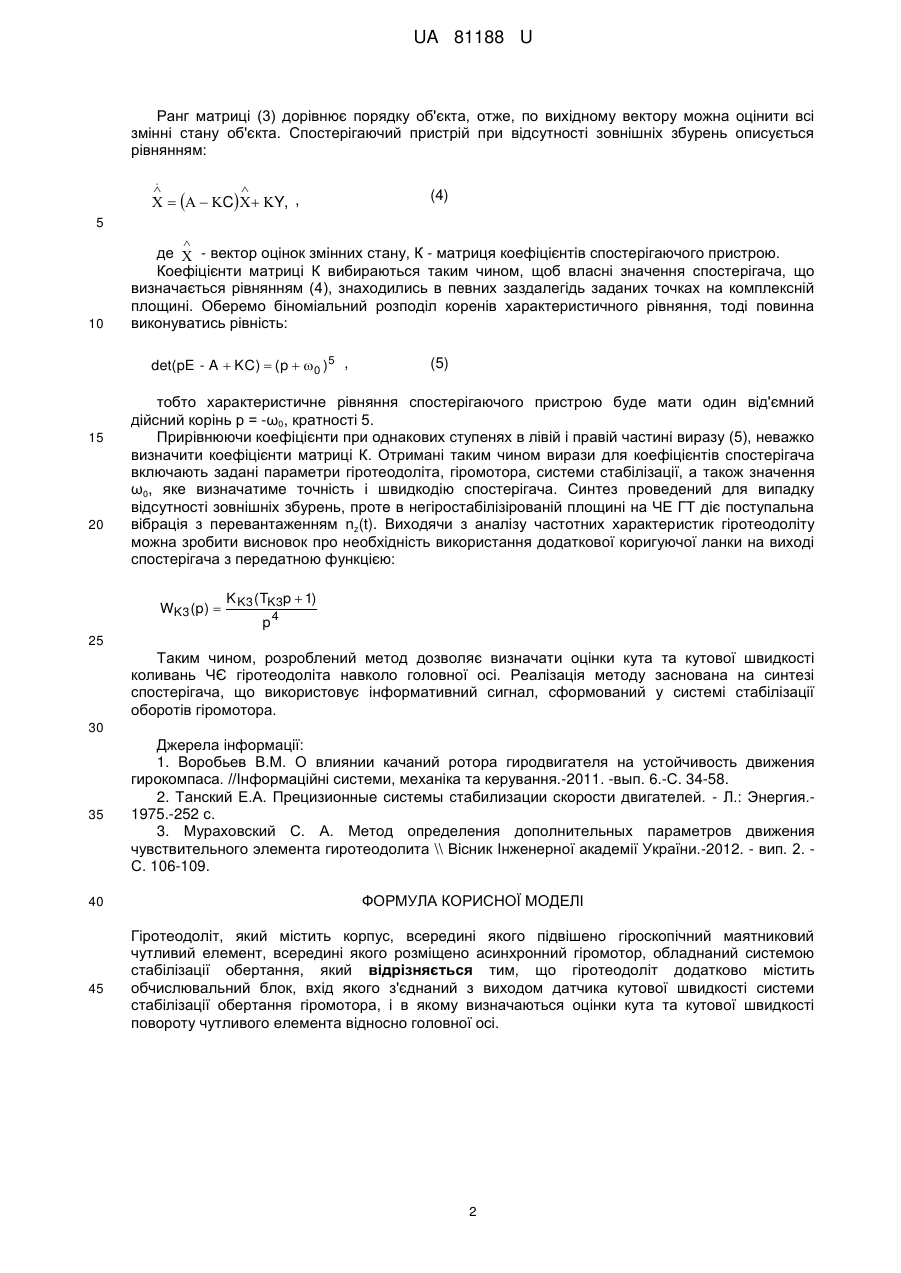
Реферат: Гіротеодоліт містить корпус, всередині якого підвішено гіроскопічний маятниковий чутливий елемент, всередині якого розміщено асинхронний гіромотор, обладнаний системою стабілізації обертання, при якому гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кутової швидкості системи стабілізації обертання гіромотора, і в якому визначаються оцінки кута та кутової швидкості повороту чутливого елемента відносно головної осі. UA 81188 U (54) ГІРОТЕОДОЛІТ UA 81188 U UA 81188 U Корисна модель належить до галузі прецизійного приладобудування і може бути використана для визначення орієнтації на поверхні Землі. При роботі гіротеодоліту в умовах поступальних та кутових коливань основи виникає додаткова вібраційна похибка приладу. Аналіз математичної моделі дозволяє зробити висновок, що існує можливість зменшення вказаної похибки, шляхом її аналітичного розрахунку і подальшої компенсації у вихідному сигналу гіротеодоліту. Для компенсації похибки необхідно вимірювання коливань чутливого елемента гіротеодоліта навколо головної осі. Найближчим аналогом корисної моделі є гіротеодоліт (патент України №75648 "Гіротеодоліт" від 15.05.2006), в якому підвищення точності виконується шляхом удосконалення конструкції приладу. В основу корисної моделі поставлено задачу підвищення точності гіротеодоліту. Поставлена задача вирішується тим що, в складі приладу додатково міститься блок, який оброблює інформацію з датчика обертання, встановленого на осі гідромотора (ГМ). На Фіг.1 зображена функціональна схема гіротеодоліту. До складу входять корпус 1, чутливий елемент 2, систему компенсаційного зворотного зв'язку 3, обчислювальний блок 4, датчик кутової швидкості 5. Гіроскопічний маятниковий чутливий елемент (ЧЕ) 2 підвішено всередині корпусу 1. На корпусі 1 закріплено фотоелектричний датчик кута, який визначає сигнал, пропорційний куту відхилення чутливого елемента в азимуті і через елементи компенсаційного зворотного зв'язку 3 подається на датчик моменту. В обчислювальному блоці 5 відбувається визначення оцінки кута та кутової швидкості чутливого елемента навколо головної осі. На Фіг.2 представлено схему стабілізації обертів промотора. Датчик 1, закріплений на осі двигуна, виробляє пропорційний швидкості обертання ротора сигнал, що надходить на один з входів фазового детектора 2. На інший його вхід надходить сигнал з опорного генератора 3. Напруга на виході фазового детектора, що залежить від фазового зсуву між цими сигналами, подається на перетворювач 4, що формує керуючий вплив. При зміні частоти обертання ротора на обмотки гідромотора 5 надходить напруга для усунення неузгодженості [1, 2]. Математичну модель коливань ЧЄ гіротеодоліта в негіростабілізованій площині можна представити у вигляді [3]: 5 10 15 20 25 30 J f mg mg n z t ГМ ГМ UU U W p . (1) , 35 40 де Jx - момент інерції ЧЕ щодо головної осі, γ - кут повороту ЧЕ відносно корпусу навколо головної осі, fγ - коефіцієнт в'язкого тертя, m - маса чутливого елемента; - зсув центра мас ЧЕ відносно точки підвісу, Н = Jp(ω0 + Δ(ω) - кінетичний момент гіроскопа, Jр - осьовий момент інерції ротора ГМ, ω0 - номінальна кутова швидкість ГМ, Δω - зміна кутової швидкості ГМ, ТГМ постійна часу гіромотора, КU - коефіцієнт передачі ГМ по напрузі, ΔU -коригуюча напруга, що прикладається до гіромотора, W(p) - передатна функція системи стабілізації, - коефіцієнт передачі системи стабілізації, - постійні часу, nz(t) = nm sin(ε + ψo)sinωt - перевантаження точки підвісу ГТ. Як вимірювану величину приймаємо сигнал, який формується в системі стабілізації. Перепишемо систему рівнянь (1) у формі простору станів, позначивши змінні стану – x , x , x , x U, x U : 1 2 3 4 5 , Y C 45 (2) де X - вектор стану, А - матриця стану, Υ - вектор вимірювань, С - матриця вимірювань. Матриця спостережуваності має вигляд: 2 3 4 Q CT A TCT A T CT A T CT A T CT . (3) 1 UA 81188 U Ранг матриці (3) дорівнює порядку об'єкта, отже, по вихідному вектору можна оцінити всі змінні стану об'єкта. Спостерігаючий пристрій при відсутності зовнішніх збурень описується рівнянням: C Y, , (4) 5 10 де - вектор оцінок змінних стану, К - матриця коефіцієнтів спостерігаючого пристрою. Коефіцієнти матриці К вибираються таким чином, щоб власні значення спостерігача, що визначається рівнянням (4), знаходились в певних заздалегідь заданих точках на комплексній площині. Оберемо біноміальний розподіл коренів характеристичного рівняння, тоді повинна виконуватись рівність: det(pE - A KC) (p 0 )5 , 15 20 (5) тобто характеристичне рівняння спостерігаючого пристрою буде мати один від'ємний дійсний корінь р = -ω0, кратності 5. Прирівнюючи коефіцієнти при однакових ступенях в лівій і правій частині виразу (5), неважко визначити коефіцієнти матриці К. Отримані таким чином вирази для коефіцієнтів спостерігача включають задані параметри гіротеодоліта, гіромотора, системи стабілізації, а також значення ω0, яке визначатиме точність і швидкодію спостерігача. Синтез проведений для випадку відсутності зовнішніх збурень, проте в негіростабілізірованій площині на ЧЕ ГТ діє поступальна вібрація з перевантаженням nz(t). Виходячи з аналізу частотних характеристик гіротеодоліту можна зробити висновок про необхідність використання додаткової коригуючої ланки на виході спостерігача з передатною функцією: WK 3 (p) K K 3 (TK 3p 1) p4 25 Таким чином, розроблений метод дозволяє визначати оцінки кута та кутової швидкості коливань ЧЄ гіротеодоліта навколо головної осі. Реалізація методу заснована на синтезі спостерігача, що використовує інформативний сигнал, сформований у системі стабілізації оборотів гіромотора. 30 35 40 45 Джерела інформації: 1. Воробьев В.М. О влиянии качаний ротора гиродвигателя на устойчивость движения гирокомпаса. //Інформаційні системи, механіка та керування.-2011. -вып. 6.-С. 34-58. 2. Танский Е.А. Прецизионные системы стабилизации скорости двигателей. - Л.: Энергия.1975.-252 с. 3. Мураховский С. А. Метод определения дополнительных параметров движения чувствительного элемента гиротеодолита \\ Вісник Інженерної академії України.-2012. - вип. 2. С. 106-109. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Гіротеодоліт, який містить корпус, всередині якого підвішено гіроскопічний маятниковий чутливий елемент, всередині якого розміщено асинхронний гіромотор, обладнаний системою стабілізації обертання, який відрізняється тим, що гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кутової швидкості системи стабілізації обертання гіромотора, і в якому визначаються оцінки кута та кутової швидкості повороту чутливого елемента відносно головної осі. 2 UA 81188 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюGyrotheodolite
Автори англійськоюMurakhovskyi Serhii Anatoliiovych, Sapehin Oleksandr Mykolaiovych
Назва патенту російськоюГиротеодолит
Автори російськоюМураховский Сергей Анатолиевич, Сапегин Александр Николаевич
МПК / Мітки
МПК: G01G 19/00
Мітки: гіротеодоліт
Код посилання
<a href="https://ua.patents.su/5-81188-giroteodolit.html" target="_blank" rel="follow" title="База патентів України">Гіротеодоліт</a>
Гіротеодоліт

Номер патенту: 73373
Опубліковано: 25.09.2012
Автори: Хоца Артем Анатолійович, Мураховський Сергій Анатолійович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
Гіротеодоліт, який містить корпус, всередині якого підвішений чутливий елемент, датчик кута, що визначає кут повороту чутливого елемента відносно корпуса в азимуті, та датчик моменту, що створює керуючий момент, який відрізняється тим, що гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кута, і в якому визначається оцінка кутової швидкості повороту чутливого елемента відносно корпуса.
Гіротеодоліт

Номер патенту: 75648
Опубліковано: 15.05.2006
Автори: Баснін Борис Опанасович, Шуть Володимир Петрович, Вірко Володимир Дмитрович, Сосуновський Олександр Сергійович, Сидоренко Юрій Захарович, Голік Марат Миколайович, Копитько Валерій Павлович, Ніжник Ігор Іванович, Сичиков Олександр Олександрович, Бузанов Віктор Іванович, Єсипенко Станіслав Іванович, Дітюк-Сніцаренко Павло Степанович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
1. Гіротеодоліт, до складу якого входить корпус, поворотний відносно вертикальної осі гіроблок, підвішений в гіроблоці гіроскопічний маятниковий чутливий елемент з вертикальним дзеркалом, закріплений на гіроблоці фотоелектричний автоколіматор з можливістю його оптичного зв'язку з дзеркалом чутливого елемента, привід розвороту гіроблока відносно корпусу, теодолітна алідада, виконана з можливістю її повороту відносно вертикальної осі і оснащена...
Гіротеодоліт
Номер патенту: 14539
Опубліковано: 09.01.1997
Автори: Дітюк-Сніцаренко Павло Степанович, Голік Марат Миколайович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
Гиротеодолит, содержащий алидаду с колонками и с возможностью поворота вокруг вертикальной оси, цилиндрический элемент с возможностью поворота вокруг горизонтальной оси, размещенный в колонках алидады, зрительную трубу, закрепленную на цилиндрическом элементе, корпус гироблока, гироскопический чуствительный элемент с зеркалом, подвешенный в корпусе гироблока, датчик угловых положений чувствительного элемента, преимущественно...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Демидова Вікторія Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, літального, стабілізації, апарата, система, адаптивна
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович, Леоненко Костянтин Миколайович
МПК: G01P 9/00
Мітки: швидкості, кутової, спосіб, пристрій, вимірювання
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Попередній патент: Диференціальний індуктивний датчик
Наступний патент: Термоелектричний генератор для рекуперації відпрацьованого тепла газоперекачувального агрегату
Випадковий патент: Візок для спікання агломерату та обпалювання котунів