Пристрій і спосіб керування помпою для в`язкого середовища
Формула / Реферат
1. Пристрій для керування помпою для густого середовища з двома перекачувальними циліндрами 50, 50', торцеві отвори 52 яких закінчуються в ємності 54 завантаження матеріалу, які приводяться в дію у протифазі за допомогою щонайменше однієї гідравлічної реверсивної помпи 6 і керованих нею гідравлічних привідних циліндрів 5, 5', з розташованим у межах ємності 54 завантаження матеріалу трубчастим перехідником 56, який поперемінно приєднується з боку входу до отворів перекачувальних циліндрів 50, 50' і одночасно звільняє інший отвір та зв'язаний з боку виходу з нагнітальним трубопроводом 58 і гідравлічно приводиться в дію, причому привідні циліндри 5, 5' на одному своєму кінці через відповідний гідравлічний трубопровід 11, 11' з'єднані з виходом реверсивної помпи 6 і на іншому своєму кінці гідравлічно з'єднані один з одним через маслопровід 12, і з пристроєм 18 для перемикання реверсивної помпи 6 і трубчастого перехідника 56 після кожного ходу поршня, який відрізняється тим, що розташовані з боку помпи гідравлічніприєднання привідних циліндрів і трубчастий перехідник, який гідравлічно приводиться в дію, розташовані у паралельно підключених гілках гідравлічного контуру, який живиться реверсивною помпою, при цьому перехідник містить реагуючий на його кутове положення позиційний датчик 80, причому передбачено щонайменше два датчики 20, 22 вмикання циліндрів 5, розташованих на привідних циліндрах на відстані один від одного і від кінцевих положень поршнів 8, реагуючих на поршні привідних циліндрів, які проходять повз них, і/або один датчик тиску, реагуючий на характер зміни тиску на виході високого тиску реверсивної помпи, при цьому автоматизований перемикальний пристрій 18 має реагуючий на вихідні сигнали позиційного датчика, з одного боку, і на вихідні сигнали датчиків вмикання циліндрів і/або датчика тиску, з іншого боку, процесор 14 для програмного керування керуючим елементом для регулювання витрати і напряму проходження реверсивної помпи, а також розташованим у гідравлічній гілці трубчастого перехідника перемикальним елементом 79.
2. Пристрій за п. 1, який відрізняється тим, що позиційний датчик перехідника виконаний як датчик кутового положення.
3. Пристрій за пп. 1 або 2, який відрізняється тим, що керуючий орган утворений скісною шайбою реверсивної помпи.
4. Пристрій за п. З, який відрізняється тим, що скісна шайба керується гідравлічно або електромеханічно.
5. Пристрій за будь-яким із пп. 1-4, який відрізняється тим, що перемикальний елемент виконаний як ходовий клапан, керований електромагнітно або механічно.
6. Спосіб керування помпою для густого середовища з двома перекачувальними циліндрами 50, 50', торцеві отвори 52 яких закінчуються в ємності 54 завантаження матеріалу, які приводяться в дію у протифазі, за допомогою щонайменше однієї гідравлічної реверсивної помпи 6 і керованих нею гідравлічних привідних циліндрів 5, 5', з розташованим у межах ємності 54 завантаження матеріалу трубчастим перехідником 56, який поперемінно приєднується з боку входу до отворів перекачувальних циліндрів 50, 50' і відповідно звільняє інший отвір та з'єднаний з боку виходу з нагнітальним трубопроводом 58 і гідравлічно приводиться в дію, причому при закінченні ходу нагнітання у перекачувальних циліндрах 50, 50' здійснюється процес перемикання реверсивної помпи 6 і трубчастого перехідника 56, який відрізняється тим, що під час процесу перемикання вимірюють кутове положення трубчастого перехідника, причому під час процесу нагнітання контролюють позицію поршнів у привідних циліндрах і сповільнюють на кінцевій ділянці кожного ходу поршня швидкість поршня за допомогою скорочення об'єму подачі реверсивної помпи і поршень підводять до кінцевого упора, причому при розташованих на упорах поршнях перемикають подачу тиску до органа приведення в дію перехідника і підвищують об'єм подачі реверсивної помпи у фазі підвищення подачі без перемикання напряму доти, поки перехідник не досягне заданого проміжного положення на шляху свого повороту, а потім об'єм подачі реверсивної помпи повертають назад доти, поки перехідник не досягне кінцевого упора, при цьому напрям протоку реверсивної помпи реверсується, а подачу тиску до перехідника переривають перемикальним елементом або зберігають за допомогою перемикання.
7. Спосіб за п. 6, який відрізняється тим, що при заключному перемиканні напряму пропускання реверсивної помпи перемикають або блокують зв'язаний з перехідником гідравлічний перемикальний елемент.
8. Спосіб за пп. 6 або 7, який відрізняється тим, що реверсивну помпу у фазі підвищення подачі під час процесу перемикання короткочасно настроюють на максимальний об'єм подачі.
Текст
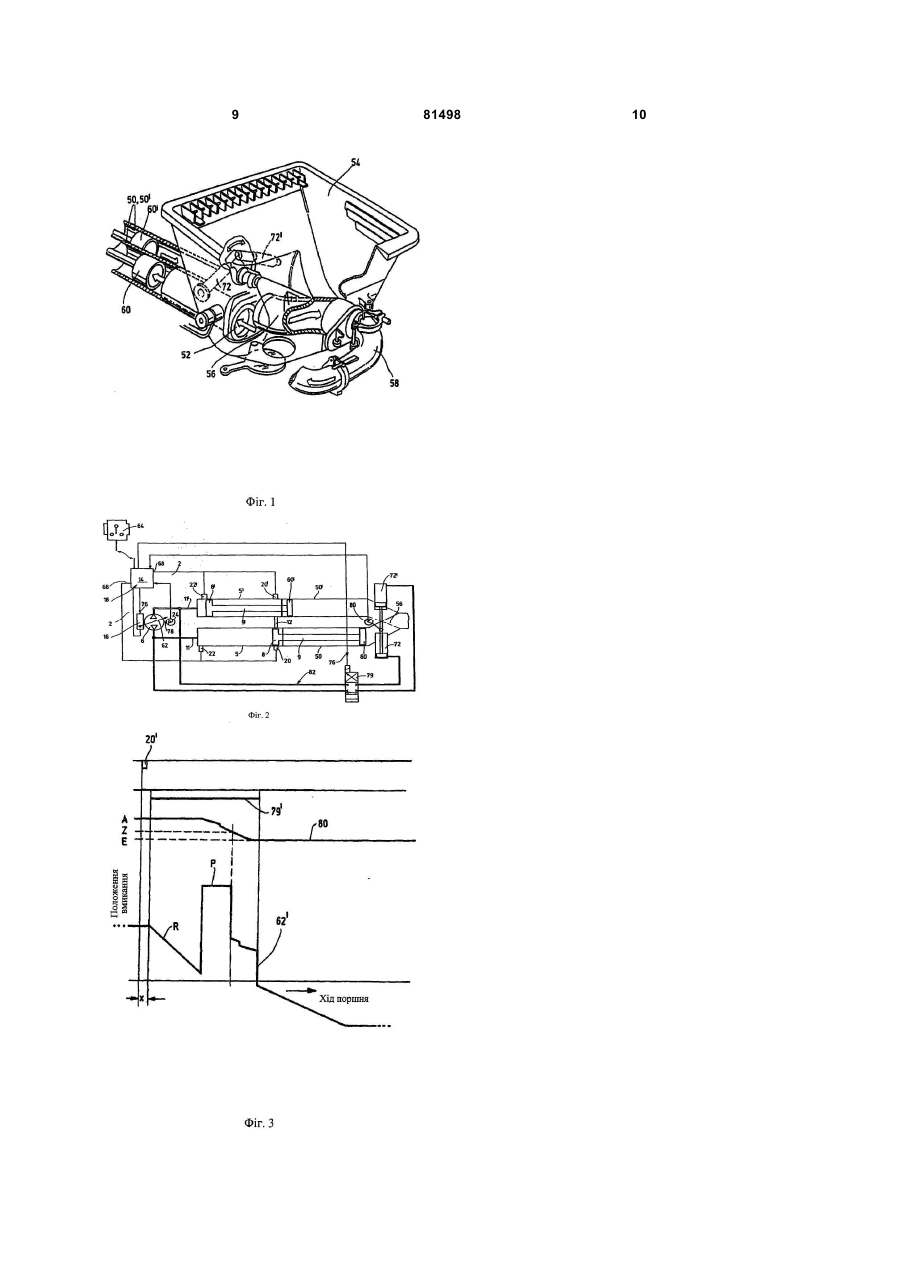
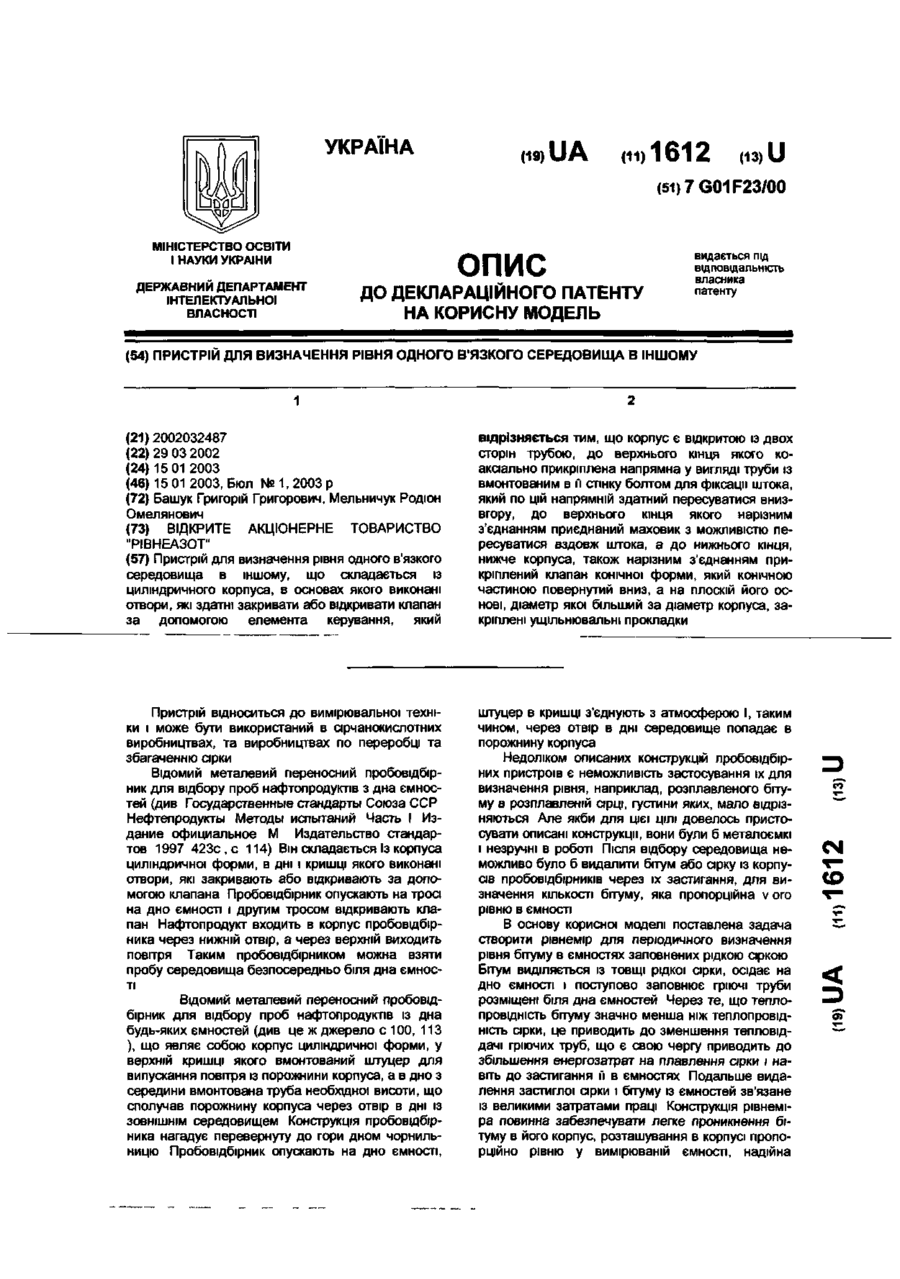
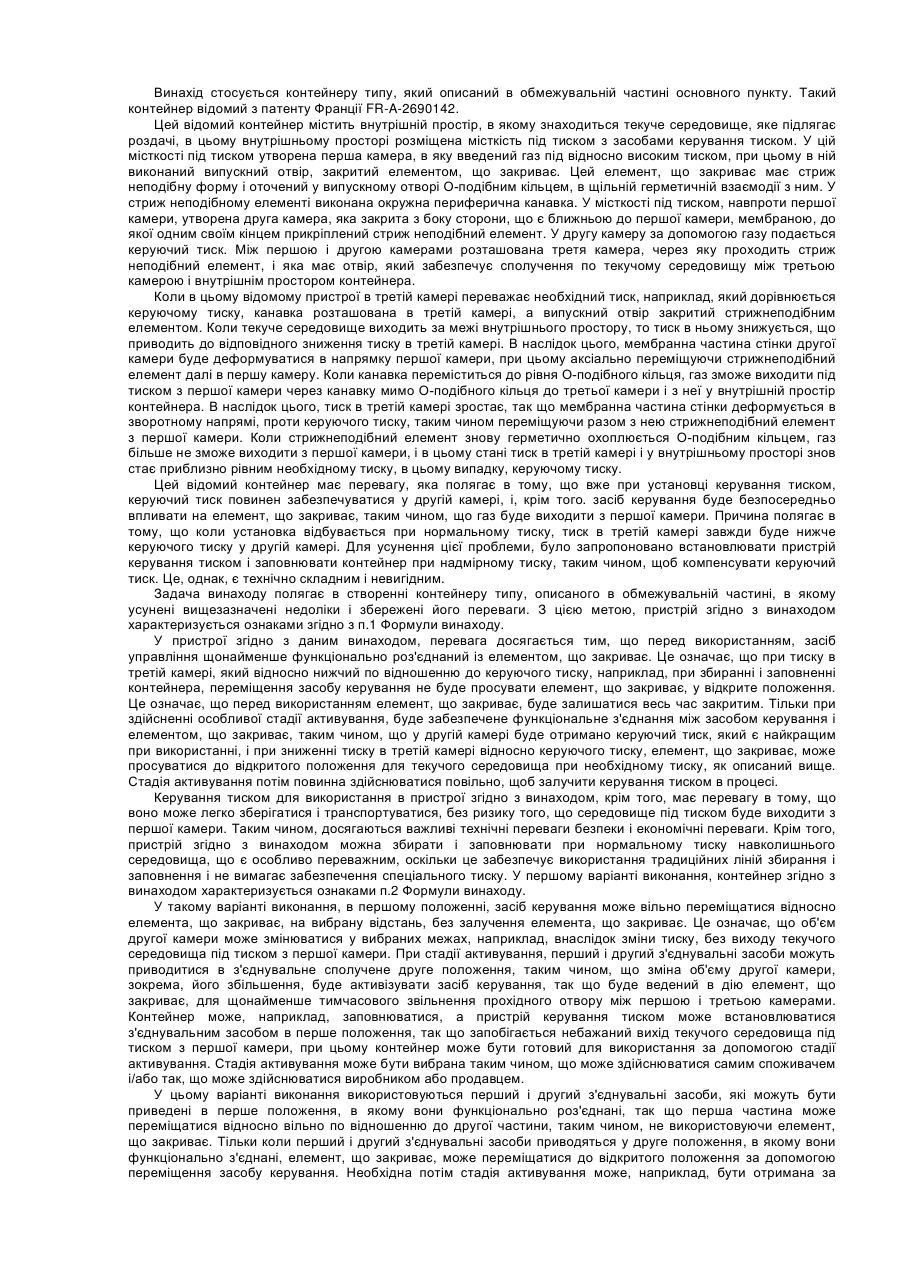
1. Пристрій для керування помпою для густого середовища з двома перекачувальними циліндрами 50, 50', торцеві отвори 52 яких закінчуються в ємності 54 завантаження матеріалу, які приводяться в дію у протифазі за допомогою щонайменше однієї гідравлічної реверсивної помпи 6 і керованих нею гідравлічних привідних циліндрів 5, 5', з розташованим у межах ємності 54 завантаження матеріалу трубчастим перехідником 56, який поперемінно приєднується з боку входу до отворів перекачувальних циліндрів 50, 50' і одночасно звільняє інший отвір та зв'язаний з боку виходу з нагнітальним трубопроводом 58 і гідравлічно приводиться в дію, причому привідні циліндри 5, 5' на одному своєму кінці через відповідний гідравлічний трубопровід 11, 11' з'єднані з виходом реверсивної помпи 6 і на іншому своєму кінці гідравлічно з'єднані один з одним через маслопровід 12, і з пристроєм 18 для перемикання реверсивної помпи 6 і трубчастого перехідника 56 після кожного ходу поршня, який відрізняється тим, що розташовані з боку помпи гідравлічні приєднання привідних циліндрів і трубчастий перехідник, який гідравлічно приводиться в дію, розташовані у паралельно підключених гілках гідравлічного контуру, який живиться реверсивною помпою, при цьому перехідник містить реагуючий на його кутове положення позиційний датчик 80, причому передбачено щонайменше два датчики 20, 22 вмикання циліндрів 5, розташованих на привідних 2 (19) 1 3 81498 4 тим, що під час процесу перемикання вимірюють кутове положення трубчастого перехідника, причому під час процесу нагнітання контролюють позицію поршнів у привідних циліндрах і сповільнюють на кінцевій ділянці кожного ходу поршня швидкість поршня за допомогою скорочення об'єму подачі реверсивної помпи і поршень підводять до кінцевого упора, причому при розташованих на упорах поршнях перемикають подачу тиску до органа приведення в дію перехідника і підвищують об'єм подачі реверсивної помпи у фазі підвищення подачі без перемикання напряму доти, поки перехідник не досягне заданого проміжного положення на шляху свого повороту, а потім об'єм подачі реверсивної помпи повертають назад доти, поки перехідник не досягне кінцевого упора, при цьому напрям протоку реверсивної помпи реверсується, а подачу тиску до перехідника переривають перемикальним елементом або зберігають за допомогою перемикання. 7. Спосіб за п. 6, який відрізняється тим, що при заключному перемиканні напряму пропускання реверсивної помпи перемикають або блокують зв'язаний з перехідником гідравлічний перемикальний елемент. 8. Спосіб за пп. 6 або 7, який відрізняється тим, що реверсивну помпу у фазі підвищення подачі під час процесу перемикання короткочасно настроюють на максимальний об'єм подачі. Винахід стосується пристрою і способу керування помпою для густого середовища з двома перекачувальними циліндрами, торцеві отвори яких закінчуються в ємності завантаження матеріалу, які приводяться в дію у протифазі за допомогою щонайменше однієї гідравлічної реверсивної помпи і керованих нею гідравлічних привідних циліндрів, з розташованим у межах ємності завантаження матеріалу трубчастим перехідником, який гідравлічно приводиться в дію, поперемінно приєднується з боку входу до отворів перекачувальних циліндрів і, відповідно, звільняє інший отвір, і зв'язаний з боку виходу з нагнітальним трубопроводом, причому привідні циліндри на одному своєму кінці гідравлічно зв'язані гідравлічним трубопроводом з підводом реверсивної помпи, а на іншому своєму кінці один з одним через маслопровід, і з пристроєм для перемикання реверсивної помпи і трубчастого перехідника після закінчення кожного ходу поршня. Відомий пристрій подібного виду для керування двоциліндровою помпою для густого середовища [DE-A-19542258], у якого кінцеві положення поршнів привідних циліндрів можуть реєструватися за допомогою датчиків вмикання циліндрів з видачею сигналів кінцевих положень. Реверсування (перемикання) потоку у реверсивній помпі може відбуватися там за сигналами кінцевих положень привідних циліндрів. Одночасно перемикається трубчастий перехідник. Цей вид керування помпою надійно функціонує, якщо привідні циліндри помпи, з одного боку, і привідні циліндри перехідника, з іншого боку, розташовані у двох гідравлічних контурах, коли, наприклад, перехідник може керуватися за допомогою ресивера, який заряджається гідравлічною помпою, окремо від гідравлічного контуру привідних циліндрів. У так званих одноконтурних помпах, в яких робоча рідина для перемикання перехідника відводиться безпосередньо з гідравлічного контуру привідних циліндрів, який живить реверсивну помпу, з'являються несправності передусім при зміні об'єму подачі і консистенції засобу, який нагнітається, якщо поршні ще не досягли свого кінцевого положення, а перемикання перехідника вже відбулося. До цього треба додати, що рух перехідників проходить у цьому випадку без сповільнення, і при цьому відбуваються удари об кінцевий упор і шум від них. Виходячи з цього, в основі винаходу лежить задача розробити пристрій і спосіб керування двоциліндровою помпою для густого середовища, які навіть в одноконтурних помпах і при різних консистенціях бетону і різних тисках дозволяли надійне перемикання трубчастих перехідників, яке проходить приглушено. Винахід виходить передусім з того, що у процесі свого руху як поршні у робочих циліндрах, так і трубчасті перехідники повинні контролюватися і автоматично перемикатися, враховуючи виміряні процеси руху. Щоб досягнути цього, пропонується, згідно з винаходом, що розташовані з боку помпи гідравлічні приєднання привідних циліндрів і перемикальні циліндри трубчастого перехідника розташовані у паралельно підключених гілках одного гідравлічного контуру, який живиться реверсивною помпою, причому перехідник має реагуючий на його положення позиційний датчик, при цьому передбачено щонайменше два датчики вмикання циліндрів, розташованих на відстані один від одного на привідних циліндрах і реагуючих на поршні привідних циліндрів, які проходять повз них, і/або один датчик тиску, реагуючий на характер зміни тиску на виході високого тиску реверсивної помпи, причому автоматизований перемикальний пристрій має стандартну керуючу програму, реагуючу на вихідні сигнали позиційного датчика, з одного боку, і на вихідні сигнали датчиків вмикання циліндрів і/або датчика тиску, з іншого боку, для програмного керування керуючим елементом для регулювання витрати і напряму пропускання реверсивної помпи, а також розташованим у гідравлічній гілці трубчастого перехідника перемикальним елементом. При цьому позиційний датчик перехідника доцільно виконаний як датчик кутового положення, вихідний сигнал якого є мірою кутового положення перехідника. 5 Інше переважне виконання винаходу передбачає, що керуючий елемент утворений скісною шайбою реверсивної помпи, і при цьому скісна шайба може приводитися в дію гідравлічно або електромеханічно. Перемикальний елемент перехідника може бути виконаний, наприклад, як електромагнітно або гідравлічно керований ходовий клапан. За допомогою заходів, які відповідають винаходу, відповідно до способу, можливо, що під час процесу перемикання вимірюють кутове положення трубчастого перехідника, при цьому під час процесу нагнітання контролюють позицію поршнів у привідних циліндрах, і на кінцевій ділянці кожного ходу поршня сповільнюють швидкість поршня за рахунок скорочення об'єму подачі реверсивної помпи і підводять поршень до кінцевого упора з незначною швидкістю, причому при розташованому з упором поршні перемикають подачу тиску до органа приведення в дію перехідника і підвищують об'єм подачі реверсивної помпи у фазі підвищення без перемикання напряму доти, поки перехідник не досягне заданого проміжного положення на шляху свого повороту, а потім об'єм подачі реверсивної помпи повертають назад доти, поки перехідник не досягне кінцевого упора, причому потім реверсують напрям пропускання реверсивної помпи і подачу тиску до перехідника переривають перемикальним елементом або зберігають за допомогою перемикання. Переважний варіант здійснення винаходу передбачає, що при заключному перемиканні напряму пропускання реверсивної помпи зв'язаний з перехідником гідравлічний перемикальний елемент перемикають або блокують. Реверсивна помпа у фазі підвищення під час процесу перемикання може короткочасно настроюватися на максимальний об'єм подачі. Далі винахід пояснюється більш докладно за допомогою прикладу здійснення, схематично представленого на кресленнях, на яких: Фіг.1 - фрагмент двоциліндрової помпи для густого середовища у частковому розрізі; Фіг.2 - схема вмикання автоматизованого керуючого пристрою для одноконтурної двоциліндрової помпи для густого середовища; Фіг.3 - діаграма для ілюстрації процесу перемикання реверсивної помпи і перехідника у кінці кожного ходу поршня. Схематично представлений на Фіг.2 керуючий пристрій призначений для помпи для густого середовища, яка відповідає Фіг.1 і має два перекачувальних циліндри 50, 50¢, торцеві отвори 52 яких закінчуються в ємності 54 завантаження матеріалу і можуть поперемінно зв'язуватися під час ходу нагнітання за допомогою трубчастого перехідника 56 з нагнітальним трубопроводом 58. Перекачувальні циліндри 50, 50' приводяться в дію у протифазі за допомогою гідравлічних привідних циліндрів 5, 5¢ і реверсивної гідропомпи 6. З цією метою поршні 60, 60¢ перекачувальних циліндрів 50, 50¢ зв'язані з поршнями 8, 8' привідних циліндрів 5, 5¢ спільним поршневим штоком 9, 9'. 81498 6 У показаному прикладі здійснення привідні циліндри 5, 5' з боку днища через гідравлічні трубопроводи 11, 11¢ гідравлічного контуру навантажуються реверсивною помпою 6 маслом під тиском, а на своєму штоковому кінці вони гідравлічно зв'язані один з одним маслопроводом 12. Напрям руху привідних поршнів 8, 8' і, разом з тим, спільних поршневих штоків 9, 9¢ реверсується за допомогою того, що за допомогою перемикального пристрою 18, який містить процесор 14 і регулюючий механізм 16, перемикається напрям пропускання реверсивної помпи 6. Реверсивна помпа 6 містить для цієї мети скісну шайбу 62, яка при перемиканні перевертається через своє нейтральне положення, так що змінюється (реверсується) напрям нагнітання масла під тиском у гідравлічних трубопроводах 11, 11¢. Об'єм подачі реверсивної помпи 6 при заданій частоті обертання не представленого тут двигуна може змінюватися за допомогою кута повороту скісної шайби 62. При цьому кут повороту скісної шайби 62 може встановлюватися приладом 64 дистанційного керування за допомогою процесора 14. Перемикання (реверсування) реверсивної помпи 6 і перехідника 56 відбувається, як тільки поршні 8, 8' привідних циліндрів 5, 5' досягають свого кінцевого положення. Перемикальний пристрій використовує вихідні сигнали розташованих відповідно на відстані від штокового кінця і від донного кінця обох привідних циліндрів 5, 5' датчиків 20, 22 і 20¢, 22' вмикання циліндрів, які зв'язані з боку виходу з автоматизованим перемикальним пристроєм 18. Датчики вмикання циліндрів реагують на привідні поршні 8, 8¢, які проходять повз них при роботі помпи, і сигналізують про цю подію на входи 66, 68 процесора. При надходженні вихідних сигналів у перемикальному пристрої виробляється затриманий за часом сигнал перемикання, який через регулюючий механізм 16 перемикає реверсивну помпу 6. Крім того, під час процесу перемикання відбувається перемикання перехідника 56 за допомогою ходового клапана 79 і перемикальних циліндрів 72, 72¢. У нормальному робочому режимі для вироблення сигналу перемикання спершу використовуються сигнали розташованих на штокових кінцях датчиків 20, 20' вмикання циліндрів. Для цього процесор 14 має стандартну програму вмикання, в якій використовуються вихідні сигнали розташованих на штокових кінцях датчиків 20, 20' вмикання циліндрів при формуванні сигналу перемикання для реверсивної помпи 6 і/або перехідника 56. Для випадку, коли відмовляє щонайменше один з датчиків 20, 20', замість нього активується щонайменше один з розташованих зі сторони дна датчиків 22, 22' для утворення сигналу перемикання для стандартної програми вмикання. Далі, перемикальний пристрій 18 включає в себе датчик 24 тиску, який приєднується до сторони 78 високого тиску реверсивної помпи 6, і вихідний сигнал якого оцінюється у процесорі 14 за допомогою стандартної програми контролю тиску. Стандартна програма контролю тиску 7 розраховує середній високий тиск протягом процесу робочого ходу і включає в себе алгоритм для визначення підвищення тиску, яке з'являється в кінці кожного ходу нагнітання, і для його перетворення у сигнал перемикання для реверсивної помпи 6 і/або перехідника 56. Цей сигнал перемикання використовується для перемикання переважно при відмові датчиків 20,20', 22, 22' вмикання циліндрів. Особливість винаходу полягає у тому, що перехідник 56 обладнаний реагуючим на його кутове положення позиційним датчиком 80, і що автоматизований перемикальний пристрій 18 має реагуючу на вихідні сигнали позиційного датчика 80, а також на вихідні сигнали датчиків 20, 20', 22, 22і вмикання циліндрів і/або датчика 24 тиску стандартну керуючу програму для програмного керування скісною шайбою 62 реверсивної помпи 6, а також розташованим у гідравлічній гілці 82 перехідника 56 перемикальним елементом 79. У показаному прикладі здійснення позиційний датчик 80 виконаний як датчик кутового положення, у той час як перемикальний елемент 79 виконаний як електромагнітно керований ходовий клапан. Цими заходами перехідник 56 залежно від свого кутового положення навантажується маслом гідросистеми, так що відбувається швидкий рух перемикання, який, проте, проходить сповільнено. Далі за допомогою діаграми, згідно з Фіг.3, докладніше пояснюється процес перемикання трубчастого перехідника. Залежно від часу на верхньому графіку нанесене положення 79¢ вмикання реверсивного клапана 79, на середньому графіку - кутове положення 80¢ датчика 80 кутового положення, і на нижньому графіку - кутове положення 62' скісної шайби 62 реверсивної помпи 6. Далі, позначені точки, в яких розташовані на штоковому кінці датчики 20 і 20' вмикання циліндрів реагують на поршні 8, 8', які проходять повз них, і видають сигнал перемикання. Після надходження сигналу перемикання на датчиках вмикання циліндрів спочатку очікується ділянка х сповільнення, залежно від об'єму подачі або тривалості ходу, доти, поки не настроїться скісна шайба 62 реверсивної помпи 6. Сповільнення дає у результаті похилу ділянку R об'єму подачі, яка веде до гальмування поршня 8, 8'. У кінці гальмівної похилої ділянки поршень знаходиться біля днища циліндра. З цього моменту скісна шайба 62 ще раз у фазі Ρ переходу повністю повертається, так що у попередньому напрямі подачі здійснюється тиск, який приводить в рух перехідник 56 з його початкової позиції А. Після того, як перехідник переходить задану проміжну позицію Ζ, про яку сигналізує позиційний датчик 80, скісна шайба 62 знову повертається назад. Подача до циліндрів 72 і, відповідно, 72' перехідника, нарешті, припиняється, якщо досягнута кінцева позиція Ε перехідника. У цьому випадку ходовий клапан 79 переходить у свою нейтральну проміжну позицію. Зрештою, скісна шайба буде повністю повернута, так що може відбуватися зворотний хід. 81498 8 Описаний спосіб особливо вигідний для одноконтурних двоциліндрових помп для густого середовища, в яких розташовані з боку помпи гідравлічні приєднання привідних циліндрів і перемикальні циліндри перехідника розташовані у паралельно підключених гілках гідравлічного контуру, який живиться від реверсивної помпи. Загалом, потрібно констатувати наступне: винахід відноситься до пристрою і способу керування двоциліндровою помпою для густого середовища, перекачувальні поршні якої приводяться в дію у протифазі, за допомогою гідравлічної реверсивної помпи 6 і керованих нею гідравлічних привідних циліндрів. Перекачувальні циліндри 50, 50' зв'язуються при кожному ході нагнітання за допомогою перехідника 56 з нагнітальним трубопроводом 58. Після закінчення кожного ходу нагнітання здійснюється процес перемикання (реверсування) реверсивної помпи 6 і перехідника 56. Щоб досягнути надійної експлуатації також в одноконтурних двоциліндрових помпах для густого середовища, пропонується, згідно з винаходом, щоб перехідний містив реагуючий на своє кутове положення позиційний датчик. Далі, передбачено щонайменше два розташованих біля гідроциліндрів на відстані один від одного реагуючих на поршні привідних циліндрів, які проходять повз них, датчики вмикання циліндрів і/або один датчик тиску, реагуючий на характер зміни тиску на виході високого тиску реверсивної помпи. Автоматизований перемикальний пристрій має реагуючу на вихідні сигнали позиційного датчика, з одного боку, і на вихідні сигнали датчиків вмикання циліндрів і/або датчика тиску, з іншого боку, стандартну керуючу програму, яка служить для програмного керування керуючим органом для регулювання витрати і напряму проходження реверсивної помпи, а також перемикальним елементом, розташованим у гідравлічній гілці перехідника. 9 81498 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for controlling a thick matter pump
Автори англійськоюHofmann Wilhelm, Muenzenmaier Werner
Назва патенту російськоюУстройство и способ управления насосом для вязкой среды
Автори російськоюХофманн Вильхельм, Мюнценмайер Вернер
МПК / Мітки
МПК: F04B 49/06, F04B 7/00, F04B 15/00
Мітки: в`язкого, спосіб, керування, середовища, пристрій, помпою
Код посилання
<a href="https://ua.patents.su/5-81498-pristrijj-i-sposib-keruvannya-pompoyu-dlya-vyazkogo-seredovishha.html" target="_blank" rel="follow" title="База патентів України">Пристрій і спосіб керування помпою для в`язкого середовища</a>
Пристрій для визначення рівня одного в’язкого середовища в іншому
Номер патенту: 1612
Опубліковано: 15.01.2003
Автори: Башук Григорій Григорович, Мельничук Родіон Омельянович
МПК: G01F 23/00
Мітки: визначення, пристрій, рівня, іншому, середовища, в`язкого, одного
Формула / Реферат:
Пристрій для визначення рівня одного в'язкого середовища в іншому, що складається із циліндричного корпуса, в основах якого виконані отвори, які здатні закривати або відкривати клапан за допомогою елемента керування, який відрізняється тим, що корпус є відкритою із двох сторін трубою, до верхнього кінця якого коаксіально прикріплена напрямна у вигляді труби із вмонтованим в її стінку болтом для фіксації штока, який по цій напрямній здатний...
Контейнер для роздачі текучого середовища, що містить пристрій керування тиском зі стадією активування, та спосіб його виконання
Номер патенту: 68411
Опубліковано: 16.08.2004
Автори: ван дер Клаув Гейдо Петрус Йоханнес, Влосвейк Йоханнес Якобус Томас
МПК: B65D 83/14, B67D 1/04
Мітки: керування, роздачі, контейнер, стадією, виконання, спосіб, активування, містить, тиском, середовища, текучого, пристрій
Формула / Реферат:
1. Контейнер для роздачі текучого середовища, що містить пристрій керування тиском зі стадією активування, що містить першу камеру для розміщення текучого середовища під тиском, зокрема газу під тиском, другу камеру, в якій щонайменше в процесі використання переважає керуючий тиск, і третю камеру, яка утворена за допомогою з'єднання або знаходиться в з'єднанні з ними, яка щонайменше частково розміщена у внутрішньому просторі контейнера, при...
Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища (варіанти)
Номер патенту: 44788
Опубліковано: 15.03.2002
Автор: Джесвайн Уілльям В.
МПК: B64C 23/00, B63H 25/06
Мітки: спрямуванням, приведення, середовища, також, руху, система, керування, варіанти, рідкого, допомогою, прискорення
Формула / Реферат:
1. Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища, що містить:безперервну динамічну поверхню для циркуляції через рідке середовище від зони забору, де рідке середовище підводять до динамічної поверхні, після чого рідке середовище поблизу від поверхні прискорюється так, щоб створити шар прискореного рідкого середовища через зону тяги, де прискорене рідке...
Пристрій для витягання в’язкого продукту з резервуару
Номер патенту: 47656
Опубліковано: 15.07.2002
Автори: Попов Олександр Леонідович, Данилов Сергій Миколайович, Дворнік Віталій Володимирович, Озерський Юрій Григорович, Колесніченко Олег Анатолійович, Івко Іван Микитович, Компанієць Олександр Іванович, Мартинюк Валентин Трофимович, Волох Віктор Михайлович
МПК: B65G 69/20
Мітки: пристрій, в`язкого, витягання, продукту, резервуару
Формула / Реферат:
1. Пристрій для витягання в'язкого продукту з резервуара, який містить площадку із засобами кріплення з розміщеним на ній насосом, зв'язаним з вертикальним трубопроводом з закріпленими насадками і з розміщеним у верхній частині пристрою забірним патрубком паралельно осі вертикального трубопроводу, нагрівник, виконаний з декількох секцій, розташованих навколо трубопроводу, і патрубок для відведення продукту, взаємозв'язаний з насосом за...
Пристрій для нагріву в’язкого продукту в резервуарі
Номер патенту: 22780
Опубліковано: 25.04.2007
Автор: Поспєлов Леонід Андрійович
МПК: H05B 6/00
Мітки: продукту, нагріву, в`язкого, резервуарі, пристрій
Формула / Реферат:
Пристрій для нагріву в'язкого продукту в резервуарі, що містить резервуар, теплоізолятор, що по зовнішній поверхні покриває резервуар, в'язкий продукт в резервуарі, генератор електромагнітного випромінювання і підключену до нього спіральну антену, який відрізняється тим, що антену повністю занурюють у в'язкий продукт і розміщують її всередині приповерхневого шару в'язкого продукту, який необхідно нагріти, а крок спіралі вибирають...
Попередній патент: Спосіб захисту графіту від окислення
Наступний патент: Фармацевтична композиція, яка містить інгібітор гістондеацетилази
Випадковий патент: Композиція інгредієнтів фіточаю