Гіротурбіна

Формула / Реферат
1. Гіротурбіна, що містить корпус (1), рушій (2), маховики (3а, 3б), що обертаються навколо відповідних локальних осей (4а, 4б) за рахунок кінематичного зв'язку з корпусом (1) зубчастою передачею (5, 6) з одночасною примусовою прецесією маховиків (3а, 3б) навколо спільної осі (7), яка відрізняється тим, що містить перше (8) та друге (9) водила, переносні вали (10а, 10б), що закріплені одним кінцем у відповідному водилі (8, 9) та розташовані вздовж локальних осей (4а, 4б) обертання, при цьому маховики (3а, 3б) встановлені через підшипники (12) на переносних валах (10) з можливістю обертання, а водила (8, 9) кінематичнo з'єднані з рушієм (2) з можливістю обертання в протилежних напрямках навколо спільної осі (7).
2. Гіротурбіна за п. 1, яка відрізняється тим, що переносні вали (10а, 10б) закріплені в водилі (8,9) на однаковій кутовій відстані один від одного з можливістю відхилення вздовж спільної осі (7).
3. Гіротурбіна за п. 1, яка відрізняється тим, що корпус рушія (2) з'єднаний з другим водилом (9), а вихідний вал рушія (2) кінематично з'єднаний з першим водилом (8).
4. Гіротурбіна за п. 1, яка відрізняється тим, що кожен маховик (3) виконаний за формою кільцевого зрізаного конуса, неявна вершина (18) якого направлена в бік спільної осі (7) обертання водила (8, 9), а діаметр D основи конусного маховика (3) визначається співвідношенням ![]() , де k>2 - безрозмірний коефіцієнт, А - відстань основи маховика (3) від вертикальної осі (7),
, де k>2 - безрозмірний коефіцієнт, А - відстань основи маховика (3) від вертикальної осі (7), ![]() - кутова швидкість обертання маховика (3) навколо локальної осі (4),
- кутова швидкість обертання маховика (3) навколо локальної осі (4), ![]() - кутова швидкість обертання водила (8, 9).
- кутова швидкість обертання водила (8, 9).
5. Гіротурбіна за п. 1, яка відрізняється тим, що маховики (3) кінематично з'єднані з корпусом (1) зубчастою гіпоїдною передачею (5, 6).
Текст
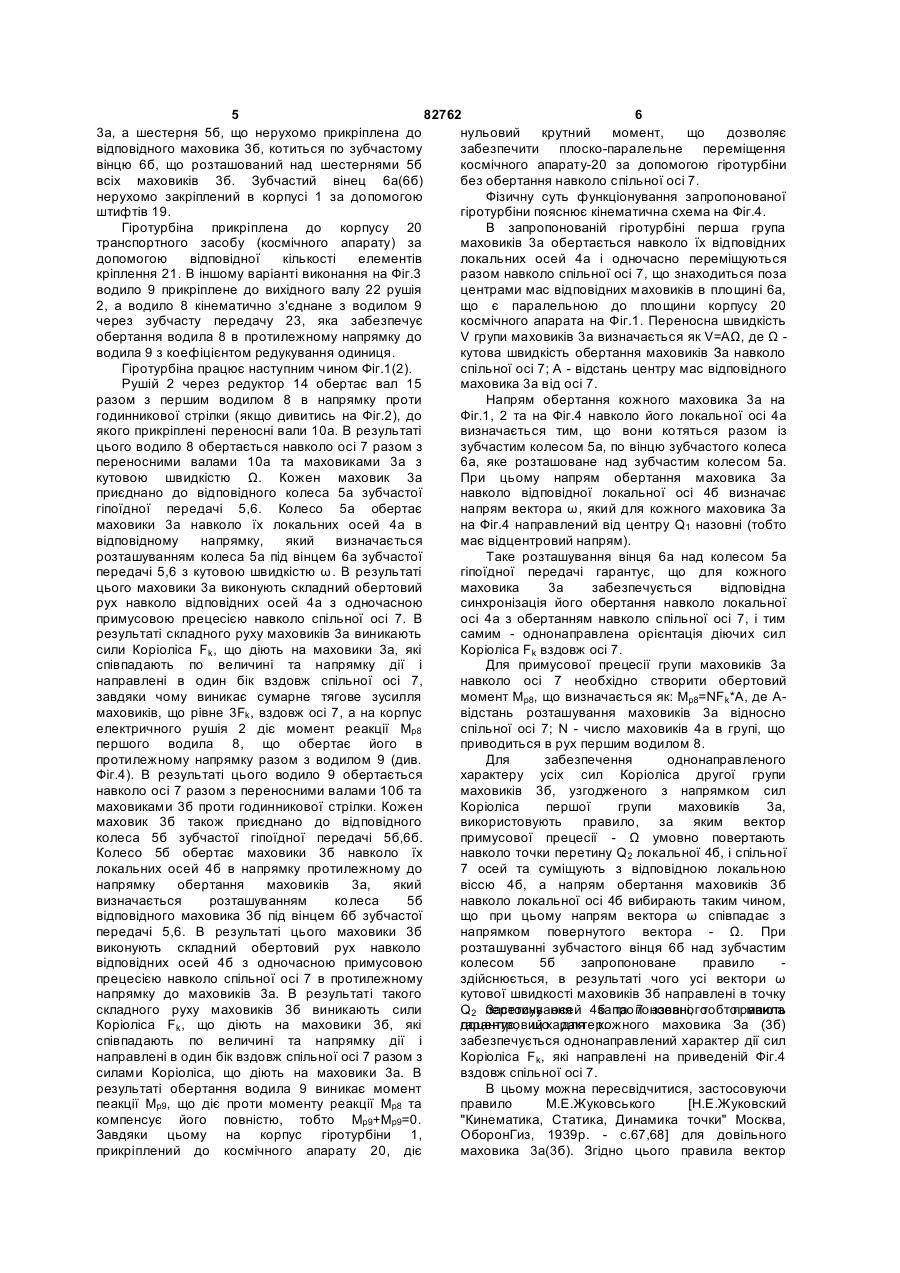
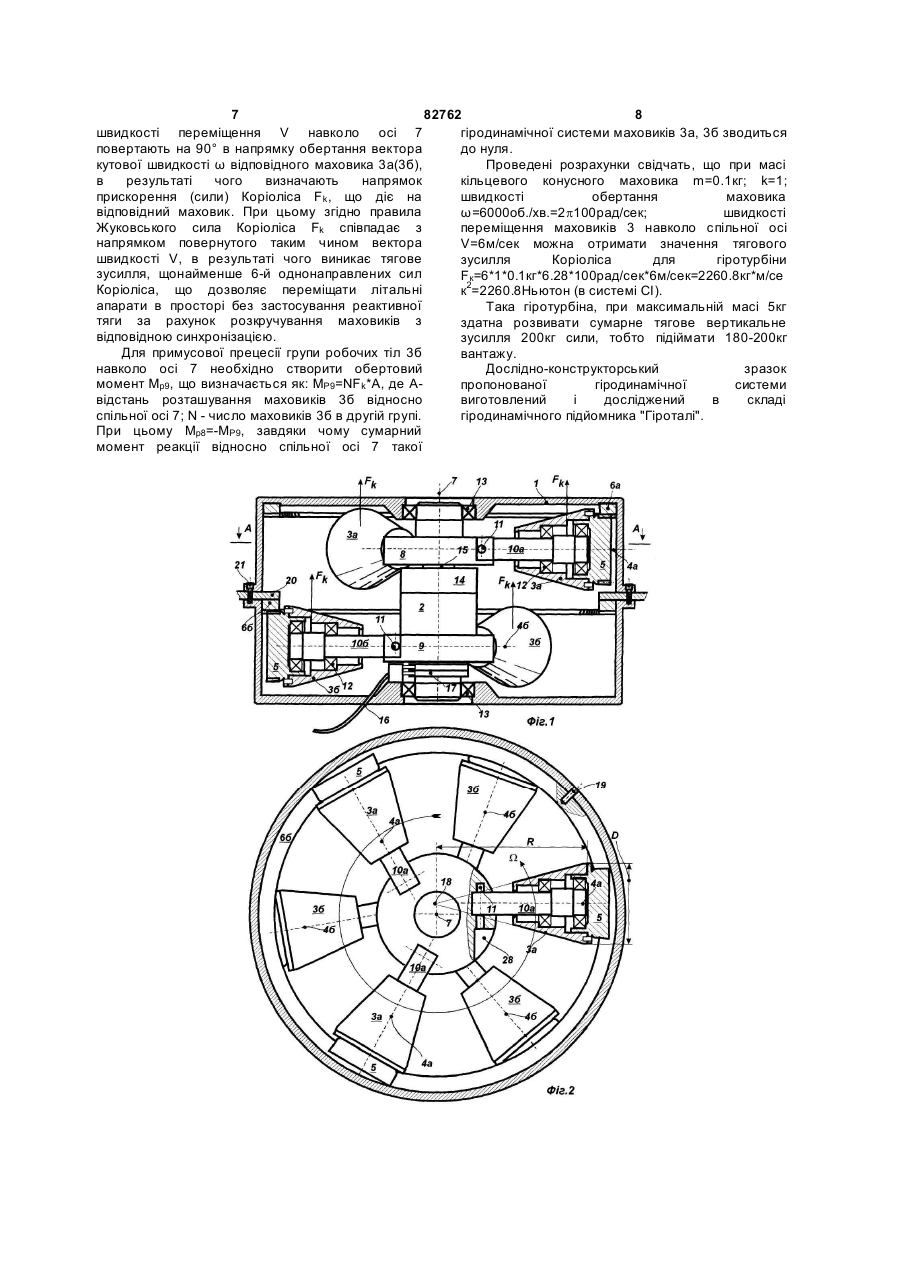
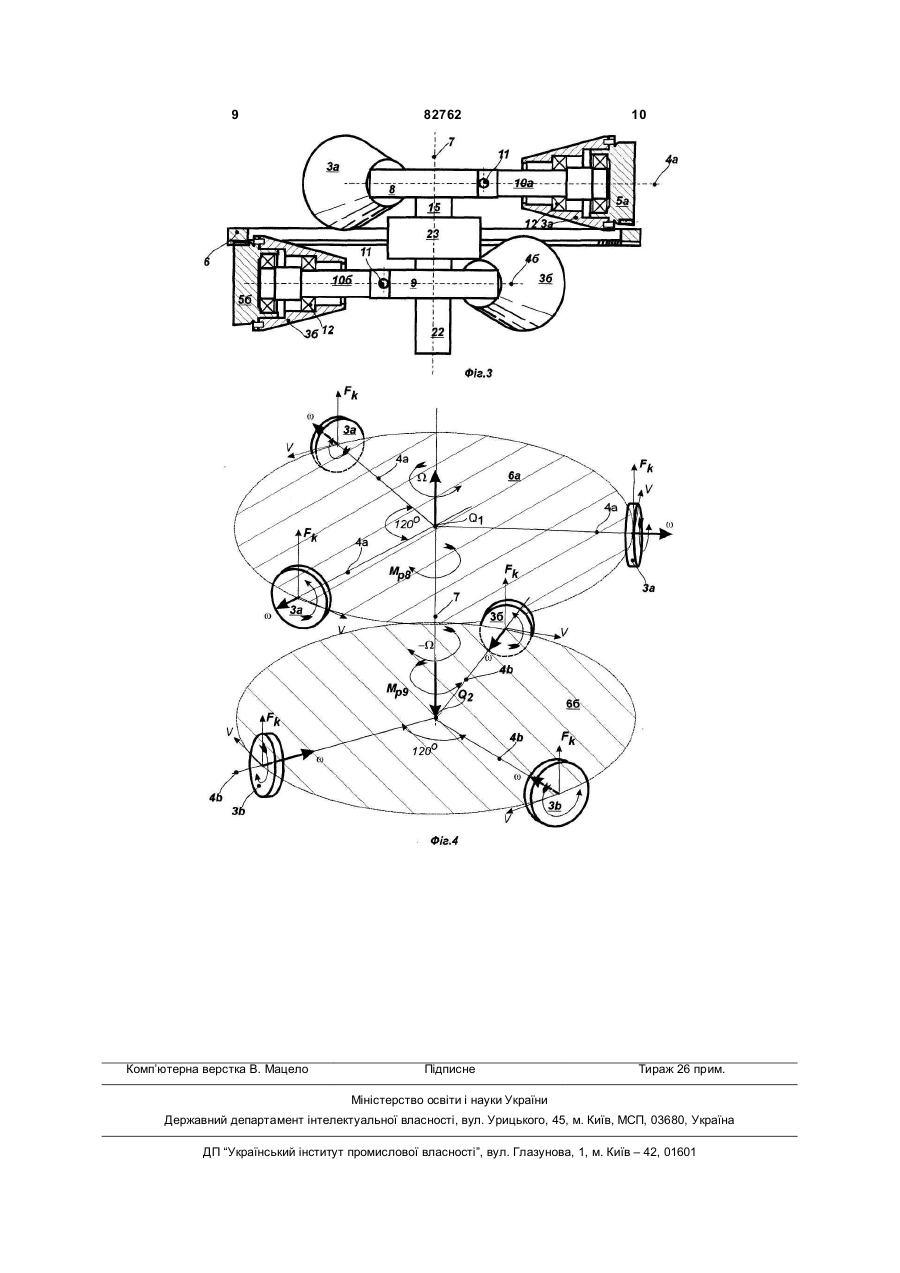
1. Гіротурбіна, що містить корпус (1), рушій (2), маховики (3а, 3б), що обертаються навколо відповідних локальних осей (4а, 4б) за рахунок кінематичного зв'язку з корпусом (1) зубчастою передачею (5, 6) з одночасною примусовою прецесією маховиків (3а, 3б) навколо спільної осі (7), яка відрізняється тим, що містить перше (8) та друге (9) водила, переносні вали (10а, 10б), що закріплені одним кінцем у відповідному водилі (8, 9) та розташовані вздовж локальних осей (4а, 4б) обертання, при цьому маховики (3а, 3б) встановлені через підшипники (12) на переносних C2 2 (19) 1 3 82762 4 маховиків навколо спільної осі на протилежний, то (гіротурбіна), що містить корпус, рушій, зубчасту в цьому випадку напрям сил Коріоліса залишиться передачу, маховики, що обертаються навколо незмінним, а момент реакції при відповідних відповідних локальних осей обертання та вузол умовах узгодження змінюється на протилежний, повороту навколо другої осі, що є що дозволяє звести сумарний момент реакції перпендикулярною до локальної осі обертання, гіротурбіни до нуля за рахунок обертання двох вузол повороту оснащено обертовою платформою водил з маховиками в протилежних напрямках. та маховиками, локальні осі обертання яких На Фіг.1 зображено розріз гіротурбіни. перпендикулярні до другої осі, що розташована за На Фіг.2 зображено вид зверху по лінії А-А. межами усіх маховиків, які встановлені через На Фіг.3 зображено варіант приводу в рух підшипники на обертовій платформі [UA, патент водил в протилежних напрямках. №15766, пул.17.07.2006]. На Фіг.4 показана кінематична схема, що Недоліком відомого пристрою є наявність пояснює суть пропонованого технічного рішення. моменту реакції відносно спільної осі, який є Гіротурбіна на Фіг.1 містить корпус 1, рушій 2, прямо пропорційним величині сили тяги маховики 3а,3б з ідентичними розмірами та гіротурбіни. Використання такої гіротурбіни конфігурацією (в кількості шести штук), що призводить до плоско-паралельного переміщення обертаються навколо відповідних локальних осей транспортного засобу з обертанням навколо 4а,4б за рахунок кінематичного зв'язку з корпусом спільної осі, що не завжди є прийнятним, 1 механічною передачею 5, 6 з одночасною особливо, коли на борту транспортного засобу примусовою прецесією навколо спільної осі 7. знаходиться екіпаж. Для компенсації такого Гіротурбіна містить перше 8 та друге 9 водила, моменту реакції необхідно встановлювати переносні вали 10а, 10б (в кількості шести штук), додаткову гіротурбіну з окремим приводом, що що закріплені одним кінцем за допомогою штифтів ускладнює конструкцію та керування такими 11 в відповідному водилі 8(9) по три в кожному технічними системами. Метою пропонованого технічного рішення є водилі. При цьому три переносні вали 10а створення безмоментного підіймального закріплені в першому водилі 8, а решта (три) гіропристрою - гіротурбіни, що приводиться в рух переносні вали 10б закріплені в другому водилі 9. від одного рушія. Переносні вали 10а, 10б розташовані вздовж З цією метою гіротурбіна, що містить корпус, відповідних локальних осей 4а,4б обертання рушій, маховики, що обертаються навколо маховиків 3а, 3б. Маховики 3а встановлені через відповідних локальних осей за рахунок підшипники 12 на переносних валах 10а з кінематичного зв'язку з корпусом зубчастою можливістю обертання навколо відповідної передачею з одночасною примусовою прецесією локальної осі 4а. Три переносні вали 10а маховиків навколо спільної осі згідно пропозиції, закріплені у водилі 8 на одинаковій кутовій відстані містить перше та друге водила, переносні вали, 120° один від одного з можливістю переміщення що закріплені одним кінцем в відповідному водилі навколо осі 7. Три переносні вали 10б закріплені у другому та розташовані вздовж локальних осей, маховики водилі 9 на такій же кутовій відстані 120° один від встановлені через підшипники на переносних одного, але з кутовим зсувом 60° по відношенню валах з можливістю обертання, а водила до переносних валів 10а, закріплених у першому кінематично з'єднані з рушієм з можливістю водилі 8. Водила 8,9 встановлені в корпусі 1 через обертання в протилежних напрямках навколо підшипники 13 з можливістю обертання в спільної осі. Крім того, згідно пропозиції, переносні вали протилежних напрямках навколо спільної осі 7. закріплені в водилі на одинаковій кутовій відстані В одному із варіантів виконання на Фіг.1 рушій один від одного з можливістю відхилення вздовж 2, (в якості якого використано електрорушій) спільної осі. кінематично зв'язаний з першим водилом 8 через Крім того, згідно пропозиції, корпус рушія планетарний редуктор 14, вихідний вал 15 якого з'єднаний з другим водилом, а вихідний вал рушія з'єднано з першим водилом 8. При цьому корпус кінематично з'єднаний з першим водилом. рушія 2 прикріплено до другого водила 9, а Крім того, згідно пропозиції, кожен маховик живлення електрорушія 2 струмом здійснюється виконано в формі кільцевого зрізаного конуса, від кабеля 16 через струмознімні кільця 17. неявна вершина якого направлена в сторону Кожен маховик 3а, 3б виконано в формі спільної осі обертання, а діаметр D основи кільцевого зрізаного конуса, неявна вершина 18 конусного маховика визначається якого (див. Фіг.2) направлена в бік спільної осі 7 співвідношенням D=κΑΩ/ω, де к>2 - безрозмірний обертання водила 8(9), а діаметр D основи коефіцієнт; А - відстань основи маховика від конусного маховика 3а, 3б визначається вертикальної осі; ω - кутова швидкість обертання співідношенням D=kRΩ/ω, де k - безрозмірний маховика навколо локальної осі, Ω - кутова коефіцієнт, що вибрано в діапазоні від 2.1 до 3.0; швидкість обертання водила. Крім того, згідно пропозиції, маховики R - відстань основи маховика від спільної осі 7; ω кінематично з'єднані з корпусом зубчастою кутова швидкість обертання маховика 3а(3б) гіпоїдною передачею. навколо локальної осі 7, Ω - кутова швидкість Між досягнутою метою та технічною суттю обертання водила 8(9). Маховики 3а,3б існує безпосередній причинно-наслідковий зв'язок. кінематично з'єднані з корпусом 1 зубчастою Момент реакції, який переборює рушій в процесі гіпоїдною передачею 5а(5б),6а(6б) в якій шестерня переміщення маховиків відомої гіротурбіни 5а, що нерухомо прикріплена до відповідного навколо спільної осі, направлений в протилежному маховика 3а, котиться по зубчастому вінцю 6а, що напрямку до примусової прецесії маховиків. Якщо розташований над шестернями 5а всіх маховиків змінити напрям переміщення (примусової прецесії) 5 82762 6 нульовий крутний момент, що дозволяє 3а, а шестерня 5б, що нерухомо прикріплена до забезпечити плоско-паралельне переміщення відповідного маховика 3б, котиться по зубчастому космічного апарату-20 за допомогою гіротурбіни вінцю 6б, що розташований над шестернями 5б без обертання навколо спільної осі 7. всіх маховиків 3б. Зубчастий вінец 6а(6б) Фізичну суть функціонування запропонованої нерухомо закріплений в корпусі 1 за допомогою гіротурбіни пояснює кінематична схема на Фіг.4. штифтів 19. В запропонованій гіротурбіні перша група Гіротурбіна прикріплена до корпусу 20 маховиків 3а обертається навколо їх відповідних транспортного засобу (космічного апарату) за локальних осей 4а і одночасно переміщуються допомогою відповідної кількості елементів разом навколо спільної осі 7, що знаходиться поза кріплення 21. В іншому варіанті виконання на Фіг.3 центрами мас відповідних маховиків в площині 6а, водило 9 прикріплене до вихідного валу 22 рушія що є паралельною до площини корпусу 20 2, а водило 8 кінематично з'єднане з водилом 9 космічного апарата на Фіг.1. Переносна швидкість через зубчасту передачу 23, яка забезпечує V групи маховиків 3а визначається як V=ΑΩ, де Ω обертання водила 8 в протилежному напрямку до кутова швидкість обертання маховиків За навколо водила 9 з коефіцієнтом редукування одиниця. спільної осі 7; А - відстань центру мас відповідного Гіротурбіна працює наступним чином Фіг.1(2). маховика 3а від осі 7. Рушій 2 через редуктор 14 обертає вал 15 Напрям обертання кожного маховика 3а на разом з першим водилом 8 в напрямку проти Фіг.1, 2 та на Фіг.4 навколо його локальної осі 4а годинникової стрілки (якщо дивитись на Фіг.2), до визначається тим, що вони котяться разом із якого прикріплені переносні вали 10а. В результаті зубчастим колесом 5а, по вінцю зубчастого колеса цього водило 8 обертається навколо осі 7 разом з 6а, яке розташоване над зубчастим колесом 5а. переносними валами 10а та маховиками 3а з При цьому напрям обертання маховика 3а кутовою швидкістю Ω. Кожен маховик 3а навколо відповідної локальної осі 4б визначає приєднано до відповідного колеса 5а зубчастої напрям вектора ω, який для кожного маховика 3а гіпоїдної передачі 5,6. Колесо 5а обертає на Фіг.4 направлений від центру Q1 назовні (тобто маховики 3а навколо їх локальних осей 4а в має відцентровий напрям). відповідному напрямку, який визначається Таке розташування вінця 6а над колесом 5а розташуванням колеса 5а під вінцем 6а зубчастої гіпоїдної передачі гарантує, що для кожного передачі 5,6 з кутовою швидкістю ω. В результаті маховика 3а забезпечується відповідна цього маховики 3а виконують складний обертовий синхронізація його обертання навколо локальної рух навколо відповідних осей 4а з одночасною осі 4а з обертанням навколо спільної осі 7, і тим примусовою прецесією навколо спільної осі 7. В самим - однонаправлена орієнтація діючих сил результаті складного руху маховиків 3а виникають Коріоліса Fk вздовж осі 7. сили Коріоліса Fk, що діють на маховики 3а, які Для примусової прецесії групи маховиків 3а співпадають по величині та напрямку дії і навколо осі 7 необхідно створити обертовий направлені в один бік вздовж спільної осі 7, момент Мр8, що визначається як: Mp8=NFk*A, де Азавдяки чому виникає сумарне тягове зусилля відстань розташування маховиків 3а відносно маховиків, що рівне 3Fk, вздовж осі 7, а на корпус спільної осі 7; N - число маховиків 4а в групі, що електричного рушія 2 діє момент реакції Mp8 приводиться в рух першим водилом 8. першого водила 8, що обертає його в Для забезпечення однонаправленого протилежному напрямку разом з водилом 9 (див. характеру усіх сил Коріоліса другої групи Фіг.4). В результаті цього водило 9 обертається маховиків 3б, узгодженого з напрямком сил навколо осі 7 разом з переносними валами 10б та Коріоліса першої групи маховиків 3а, маховиками 3б проти годинникової стрілки. Кожен використовують правило, за яким вектор маховик 3б також приєднано до відповідного примусової прецесії - Ω умовно повертають колеса 5б зубчастої гіпоїдної передачі 5б,6б. навколо точки перетину Q2 локальної 4б, і спільної Колесо 5б обертає маховики 3б навколо їх 7 осей та суміщують з відповідною локальною локальних осей 4б в напрямку протилежному до віссю 4б, а напрям обертання маховиків 3б напрямку обертання маховиків 3а, який навколо локальної осі 4б вибирають таким чином, визначається розташуванням колеса 5б що при цьому напрям вектора ω співпадає з відповідного маховика 3б під вінцем 6б зубчастої напрямком повернутого вектора - Ω. При передачі 5,6. В результаті цього маховики 3б розташуванні зубчастого вінця 6б над зубчастим виконують складний обертовий рух навколо колесом 5б запропоноване правило відповідних осей 4б з одночасною примусовою здійснюється, в результаті чого усі вектори ω прецесією навколо спільної осі 7 в протилежному кутової швидкості маховиків 3б направлені в точку напрямку до маховиків 3а. В результаті такого Q2 перетину осей 4б та 7 ззовні, тобто мають Застосування запропонованого правила складного руху маховиків 3б виникають сили гарантує, що для кожного маховика За (3б) доцентровий характер. Коріоліса Fk, що діють на маховики 3б, які забезпечується однонаправлений характер дії сил співпадають по величині та напрямку дії і Коріоліса Fk, які направлені на приведеній Фіг.4 направлені в один бік вздовж спільної осі 7 разом з вздовж спільної осі 7. силами Коріоліса, що діють на маховики 3а. В В цьому можна пересвідчитися, застосовуючи результаті обертання водила 9 виникає момент правило М.Е.Жуковського [Н.Е.Жуковский пеакції Мр9, що діє проти моменту реакції Мр8 та "Кинематика, Статика, Динамика точки" Москва, компенсує його повністю, тобто Мр9+Мр9=0. ОборонГиз, 1939р. - с.67,68] для довільного Завдяки цьому на корпус гіротурбіни 1, маховика 3а(3б). Згідно цього правила вектор прикріплений до космічного апарату 20, діє 7 82762 8 гіродинамічної системи маховиків 3а, 3б зводиться швидкості переміщення V навколо осі 7 до нуля. повертають на 90° в напрямку обертання вектора Проведені розрахунки свідчать, що при масі кутової швидкості ω відповідного маховика 3а(3б), кільцевого конусного маховика m=0.1кг; k=1; в результаті чого визначають напрямок швидкості обертання маховика прискорення (сили) Коріоліса Fk, що діє на відповідний маховик. При цьому згідно правила ω=6000об./хв.=2p100рад/сек; швидкості Жуковського сила Коріоліса Fk співпадає з переміщення маховиків 3 навколо спільної осі напрямком повернутого таким чином вектора V=6м/сек можна отримати значення тягового швидкості V, в результаті чого виникає тягове зусилля Коріоліса для гіротурбіни зусилля, щонайменше 6-й однонаправлених сил Fк=6*1*0.1кг*6.28*100рад/сек*6м/сек=2260.8кг*м/се Коріоліса, що дозволяє переміщати літальні к2=2260.8Ньютон (в системі СІ). апарати в просторі без застосування реактивної Така гіротурбіна, при максимальній масі 5кг тяги за рахунок розкручування маховиків з здатна розвивати сумарне тягове вертикальне відповідною синхронізацією. зусилля 200кг сили, тобто підіймати 180-200кг Для примусової прецесії групи робочих тіл 3б вантажу. навколо осі 7 необхідно створити обертовий Дослідно-конструкторський зразок момент Мр9, що визначається як: МР9=NFk*A, де Апропонованої гіродинамічної системи відстань розташування маховиків 3б відносно виготовлений і досліджений в складі спільної осі 7; N - число маховиків 3б в другій групі. гіродинамічного підйомника "Гіроталі". При цьому Мр8=-МР9, завдяки чому сумарний момент реакції відносно спільної осі 7 такої 9 Комп’ютерна верстка В. Мацело 82762 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro-turbine
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюГиротурбина
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00, F03G 3/08
Мітки: гіротурбіна
Код посилання
<a href="https://ua.patents.su/5-82762-giroturbina.html" target="_blank" rel="follow" title="База патентів України">Гіротурбіна</a>
Гіродинамічна система (“гіротурбіна”)
Номер патенту: 82285
Опубліковано: 25.03.2008
Автор: Лиховид Юрій Макарович
МПК: F03G 3/00, B64G 1/24, G01C 19/00
Мітки: система, гіродинамічна, гіротурбіна
Формула / Реферат:
1. Гіродинамічна система, що містить корпус (1), рушій (2), зубчасту передачу (3, 4), маховики (5, 5а), які обертаються навколо відповідних локальних осей (7) та встановлені на обертовій платформі (8, 9) для забезпечення примусової прецесії маховиків навколо другої осі (10), що розташована поза межами усіх маховиків (5, 5а), які кінематичнo зв'язані з корпусом (1) через зубчасту передачу (3, 4), яка відрізняється тим, що маховик (5а)...
Гіротурбіна лиховида
Номер патенту: 15766
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: лиховида, гіротурбіна
Формула / Реферат:
1. Гіротурбіна, що містить корпус, рушій, зубчасту передачу, маховик, що обертається навколо локальної осі обертання, та вузол повороту навколо другої осі, яка відрізняється тим, що вузол повороту оснащено обертовою платформою та щонайменше двома додатковими маховиками, які встановлені через підшипники на обертовій платформі, а локальні осі обертання маховиків розташовані в площині обертової платформи перпендикулярно до другої осі, що...
Силова гіродинамічна система “гіротурбіна”
Номер патенту: 80893
Опубліковано: 12.11.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: система, гіротурбіна, силова, гіродинамічна
Формула / Реферат:
1. Силова гіродинамічна система, що містить корпус, рушій, вузол повороту для здійснення примусової прецесії, який кінематично зв’язаний з рушієм, маховики, що розташовані навколо осі прецесії і встановлені з можливістю обертання в різних напрямках навколо відповідної локальної осі обертання маховика, при цьому всі маховики закріплені в вузлі повороту з можливістю переміщення навколо осі прецесії, яка відрізняється тим, що вузол повороту...
Спосіб використання тягового зусилля коріоліса (варіанти)
Номер патенту: 80211
Опубліковано: 27.08.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: тягового, зусилля, спосіб, використання, варіанти, коріоліса
Формула / Реферат:
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних...
Гіротурбінний транспортний засіб
Номер патенту: 15767
Опубліковано: 17.07.2006
Автори: Скамбричий Олександр Володимирович, Скамбричий Володимир Вікторович, Лиховид Юрій Макарович, Лиховид Олександр Юрійович
МПК: G01C 19/00, B64C 1/00
Мітки: гіротурбінний, транспортний, засіб
Формула / Реферат:
1. Гіротурбінний транспортний засіб, що містить енергетичну установку, кабіну для екіпажу та систему керування, що об'єднані в модуль, корпус з двох частин та тіло обертання, який відрізняється тим, що встановлені щонайменше дві гіротурбіни з тілами обертання, які прикріплені до модуля транспортного засобу.2. Транспортний засіб за п. 1, який відрізняється тим, що перша гіротурбіна розташована зверху модуля в одній частині...
Попередній патент: Пристрій для реабілітації дітей, хворих на церебральний параліч
Наступний патент: Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Випадковий патент: Тістомісильна машина безперервної дії