Спосіб отримання параметрів переміщення об’єкта в зоні лінійної охоронної системи
Номер патенту: 85526
Опубліковано: 25.11.2013
Автори: Франовський Олександр Аркадійович, Василенко Олексій Дмитрович

Формула / Реферат
Спосіб отримання параметрів переміщення об'єкта в зоні лінійної охоронної системи шляхом формування невидимого бар'єру за допомогою оптичних променів, перетин яких викликає появу сигналу тривоги, який відрізняється тим, що додатково аналізують часову затримку, послідовність та тривалість часу відсутності сигналів передавального блока в різних оптичних променях.
Текст
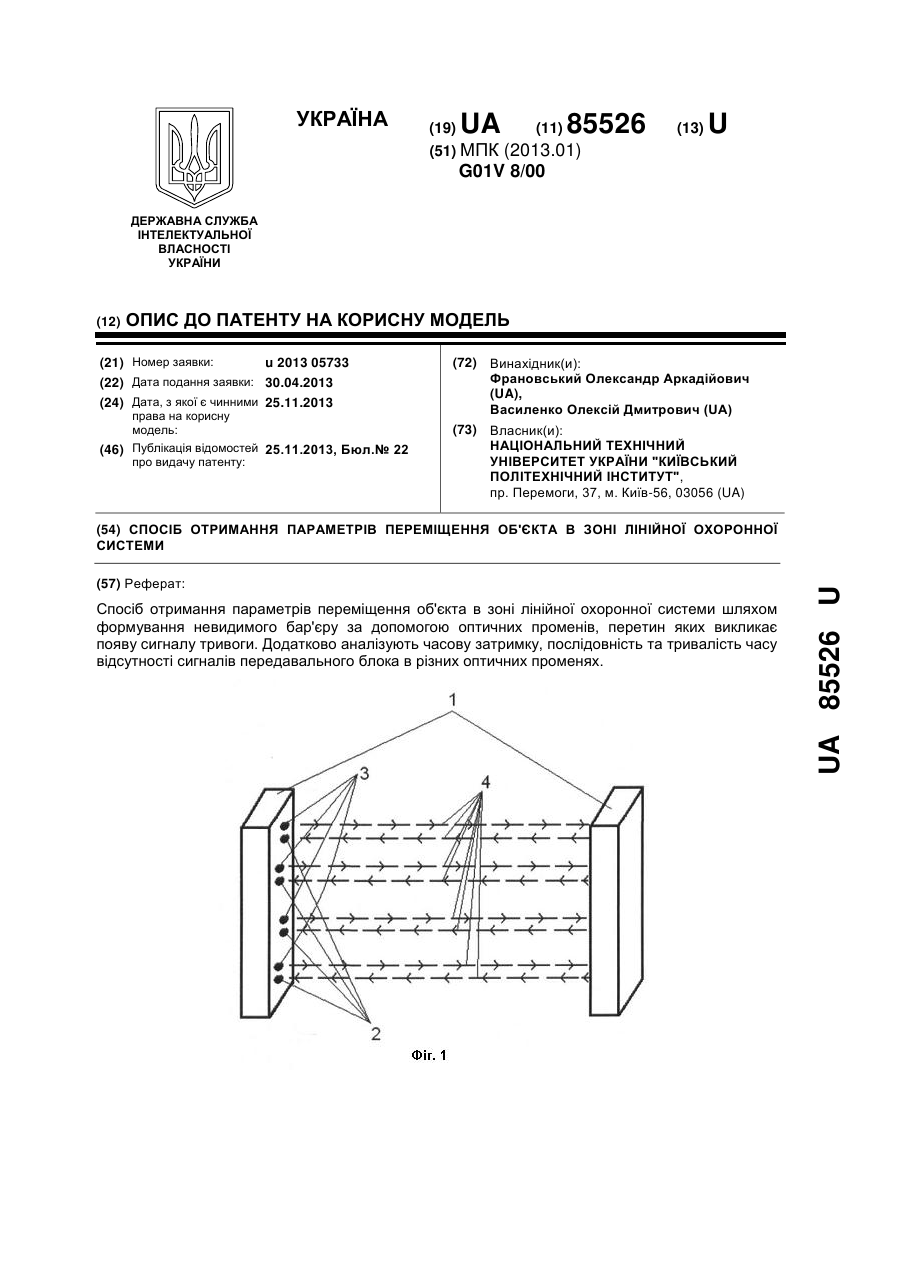
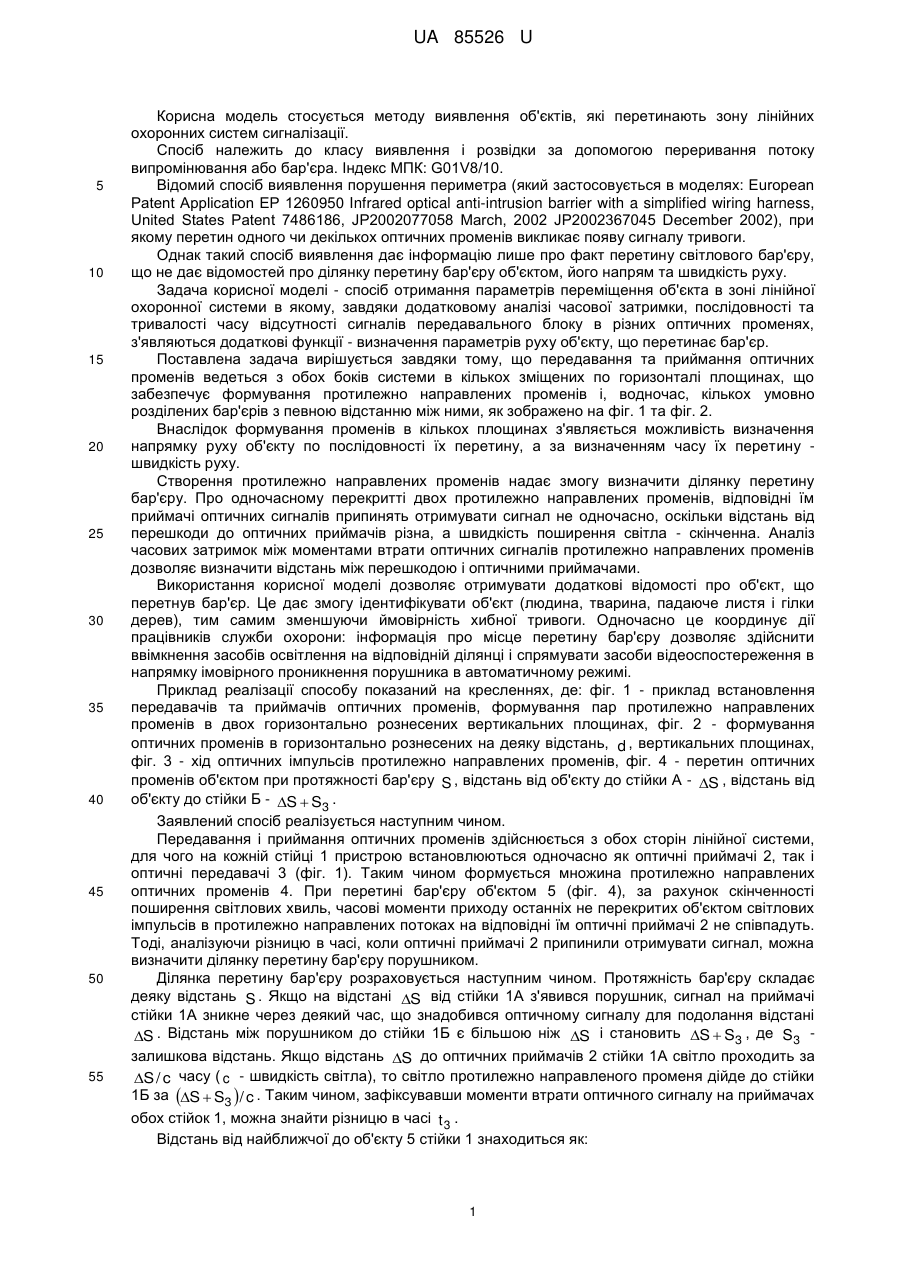
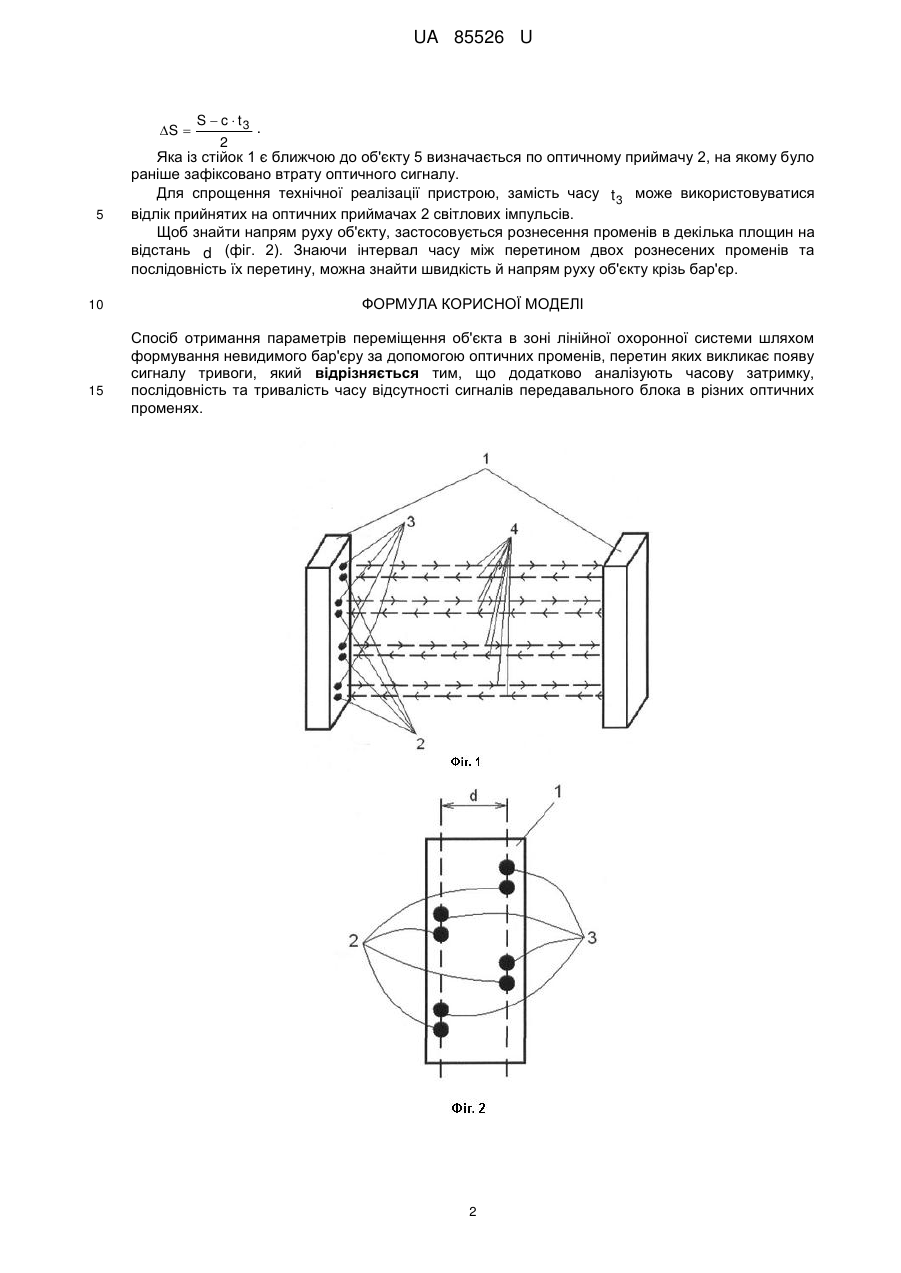
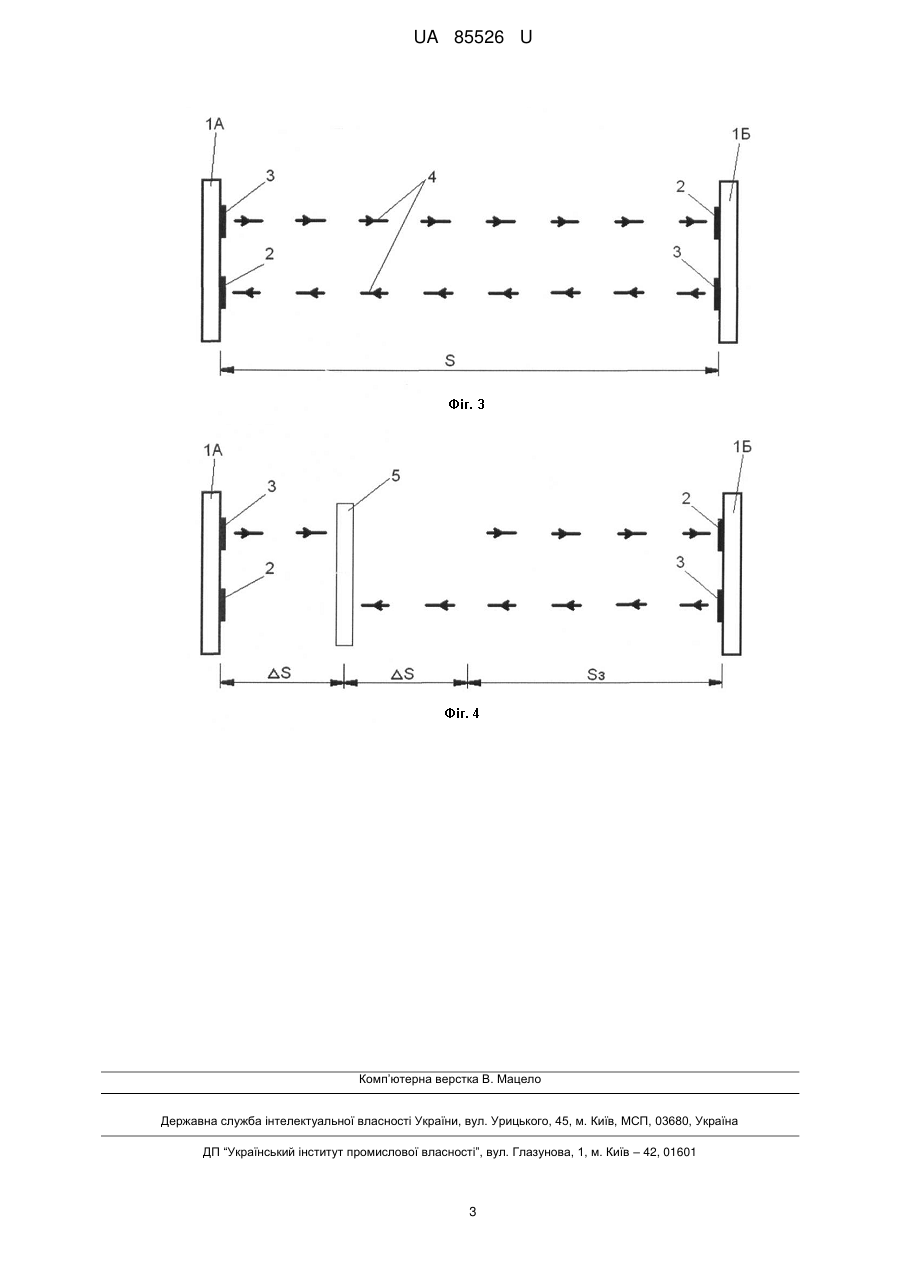
Реферат: Спосіб отримання параметрів переміщення об'єкта в зоні лінійної охоронної системи шляхом формування невидимого бар'єру за допомогою оптичних променів, перетин яких викликає появу сигналу тривоги. Додатково аналізують часову затримку, послідовність та тривалість часу відсутності сигналів передавального блока в різних оптичних променях. UA 85526 U (54) СПОСІБ ОТРИМАННЯ ПАРАМЕТРІВ ПЕРЕМІЩЕННЯ ОБ'ЄКТА В ЗОНІ ЛІНІЙНОЇ ОХОРОННОЇ СИСТЕМИ UA 85526 U UA 85526 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель стосується методу виявлення об'єктів, які перетинають зону лінійних охоронних систем сигналізації. Спосіб належить до класу виявлення і розвідки за допомогою переривання потоку випромінювання або бар'єра. Індекс МПК: G01V8/10. Відомий спосіб виявлення порушення периметра (який застосовується в моделях: European Patent Application ЕР 1260950 Infrared optical anti-intrusion barrier with a simplified wiring harness, United States Patent 7486186, JP2002077058 March, 2002 JP2002367045 December 2002), при якому перетин одного чи декількох оптичних променів викликає появу сигналу тривоги. Однак такий спосіб виявлення дає інформацію лише про факт перетину світлового бар'єру, що не дає відомостей про ділянку перетину бар'єру об'єктом, його напрям та швидкість руху. Задача корисної моделі - спосіб отримання параметрів переміщення об'єкта в зоні лінійної охоронної системи в якому, завдяки додатковому аналізі часової затримки, послідовності та тривалості часу відсутності сигналів передавального блоку в різних оптичних променях, з'являються додаткові функції - визначення параметрів руху об'єкту, що перетинає бар'єр. Поставлена задача вирішується завдяки тому, що передавання та приймання оптичних променів ведеться з обох боків системи в кількох зміщених по горизонталі площинах, що забезпечує формування протилежно направлених променів і, водночас, кількох умовно розділених бар'єрів з певною відстанню між ними, як зображено на фіг. 1 та фіг. 2. Внаслідок формування променів в кількох площинах з'являється можливість визначення напрямку руху об'єкту по послідовності їх перетину, а за визначенням часу їх перетину швидкість руху. Створення протилежно направлених променів надає змогу визначити ділянку перетину бар'єру. Про одночасному перекритті двох протилежно направлених променів, відповідні їм приймачі оптичних сигналів припинять отримувати сигнал не одночасно, оскільки відстань від перешкоди до оптичних приймачів різна, а швидкість поширення світла - скінченна. Аналіз часових затримок між моментами втрати оптичних сигналів протилежно направлених променів дозволяє визначити відстань між перешкодою і оптичними приймачами. Використання корисної моделі дозволяє отримувати додаткові відомості про об'єкт, що перетнув бар'єр. Це дає змогу ідентифікувати об'єкт (людина, тварина, падаюче листя і гілки дерев), тим самим зменшуючи ймовірність хибної тривоги. Одночасно це координує дії працівників служби охорони: інформація про місце перетину бар'єру дозволяє здійснити ввімкнення засобів освітлення на відповідній ділянці і спрямувати засоби відеоспостереження в напрямку імовірного проникнення порушника в автоматичному режимі. Приклад реалізації способу показаний на кресленнях, де: фіг. 1 - приклад встановлення передавачів та приймачів оптичних променів, формування пар протилежно направлених променів в двох горизонтально рознесених вертикальних площинах, фіг. 2 - формування оптичних променів в горизонтально рознесених на деяку відстань, d , вертикальних площинах, фіг. 3 - хід оптичних імпульсів протилежно направлених променів, фіг. 4 - перетин оптичних променів об'єктом при протяжності бар'єру S , відстань від об'єкту до стійки А - S , відстань від об'єкту до стійки Б - S S3 . Заявлений спосіб реалізується наступним чином. Передавання і приймання оптичних променів здійснюється з обох сторін лінійної системи, для чого на кожній стійці 1 пристрою встановлюються одночасно як оптичні приймачі 2, так і оптичні передавачі 3 (фіг. 1). Таким чином формується множина протилежно направлених оптичних променів 4. При перетині бар'єру об'єктом 5 (фіг. 4), за рахунок скінченності поширення світлових хвиль, часові моменти приходу останніх не перекритих об'єктом світлових імпульсів в протилежно направлених потоках на відповідні їм оптичні приймачі 2 не співпадуть. Тоді, аналізуючи різницю в часі, коли оптичні приймачі 2 припинили отримувати сигнал, можна визначити ділянку перетину бар'єру порушником. Ділянка перетину бар'єру розраховується наступним чином. Протяжність бар'єру складає деяку відстань S . Якщо на відстані S від стійки 1А з'явився порушник, сигнал на приймачі стійки 1А зникне через деякий час, що знадобився оптичному сигналу для подолання відстані S . Відстань між порушником до стійки 1Б є більшою ніж S і становить S S3 , де S3 залишкова відстань. Якщо відстань S до оптичних приймачів 2 стійки 1А світло проходить за S / c часу ( c - швидкість світла), то світло протилежно направленого променя дійде до стійки 1Б за S S3 / c . Таким чином, зафіксувавши моменти втрати оптичного сигналу на приймачах обох стійок 1, можна знайти різницю в часі t 3 . Відстань від найближчої до об'єкту 5 стійки 1 знаходиться як: 1 UA 85526 U S c t3 . 2 Яка із стійок 1 є ближчою до об'єкту 5 визначається по оптичному приймачу 2, на якому було раніше зафіксовано втрату оптичного сигналу. Для спрощення технічної реалізації пристрою, замість часу t 3 може використовуватися відлік прийнятих на оптичних приймачах 2 світлових імпульсів. Щоб знайти напрям руху об'єкту, застосовується рознесення променів в декілька площин на відстань d (фіг. 2). Знаючи інтервал часу між перетином двох рознесених променів та послідовність їх перетину, можна знайти швидкість й напрям руху об'єкту крізь бар'єр. S 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб отримання параметрів переміщення об'єкта в зоні лінійної охоронної системи шляхом формування невидимого бар'єру за допомогою оптичних променів, перетин яких викликає появу сигналу тривоги, який відрізняється тим, що додатково аналізують часову затримку, послідовність та тривалість часу відсутності сигналів передавального блока в різних оптичних променях. 2 UA 85526 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01V 8/00
Мітки: отримання, зони, охоронної, переміщення, спосіб, лінійної, об'єкта, параметрів, системі
Код посилання
<a href="https://ua.patents.su/5-85526-sposib-otrimannya-parametriv-peremishhennya-obehkta-v-zoni-linijjno-okhoronno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб отримання параметрів переміщення об’єкта в зоні лінійної охоронної системи</a>
Спосіб ідентифікації характеристик лінійної системи
Номер патенту: 51855
Опубліковано: 10.08.2010
Автори: Гаврилюк Володимир Ілліч, Рибалка Роман Володимирович
МПК: B61L 7/00
Мітки: системі, лінійної, спосіб, характеристик, ідентифікації
Формула / Реферат:
Спосіб ідентифікації характеристик лінійної системи, при якому на її вхід подають тестовий сигнал спеціальної форми, який відрізняється тим, що додатково визначають частотні характеристики лінійного фільтра, призначеного для перетворення вхідного оригінального сигналу на вхідний змінений сигнал , який...
Спосіб настройки автомобільної охоронної системи
Номер патенту: 51472
Опубліковано: 12.07.2010
Автори: Бабарикін Олексій Валентинович, Ткаленко Андрій Олександрович, Алексєєв Олег Вадимович, Голубєв Олександр Анатолійович
МПК: B60R 99/00, B60R 25/00
Мітки: охоронної, автомобільної, спосіб, настройки, системі
Формула / Реферат:
Спосіб настройки автомобільної охоронної системи за допомогою комп'ютера по радіоканалу, який відрізняється тим, що у пам'яті системного блока персонального комп'ютера зберігають програми настройки алгоритмів роботи різних автомобільних охоронних систем, при активації режиму настроювання необхідну програму настройки надсилають на приймально-передавальний HID-пристрій для перетворення і передачі її по радіочастотному каналу на антену...
Спосіб перезавантаження gsm модуля автомобільної сервісно-інформаційної охоронної gsm системи
Номер патенту: 53750
Опубліковано: 11.10.2010
Автори: Ткаленко Андрій Олександрович, Камбуров Артем Дмитрович, Бабарикін Олексій Валентинович, Алексєєв Олег Вадимович, Голубєв Олександр Анатолійович
МПК: B60R 25/00, B60R 99/00
Мітки: системі, спосіб, охоронної, автомобільної, сервісно-інформаційної, перезавантаження, модуля
Формула / Реферат:
Спосіб перезавантаження GSM модуля автомобільної сервісно-інформаційної охоронної GSM системи, оснований на відключенні і поданні живлення на GSM модуль, який відрізняється тим, що комутацію ланцюга живлення GSM модуля виконують за допомогою транзистора, керування яким здійснюють мікроконтролером системи, який за допомогою програми визначення неробочого стану GSM модуля визначає момент часу, в якій необхідно подати команду на закриття, а...
Спосіб визначення параметрів транспортних потоків у зоні перехрестя
Номер патенту: 71913
Опубліковано: 25.07.2012
Автори: Ярута Антон Миколайович, Левтеров Андрій Іванович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: параметрів, транспортних, визначення, перехрестя, потоків, зони, спосіб
Формула / Реферат:
Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий...
Спосіб побудови входів автомобільної охоронної системи
Номер патенту: 53748
Опубліковано: 11.10.2010
Автори: Ткаленко Андрій Олександрович, Алексєєв Олег Вадимович, Голубєв Олександр Анатолійович, Камбуров Артем Дмитрович, Бабарикін Олексій Валентинович
МПК: B60R 25/10, B60R 25/00
Мітки: спосіб, входів, системі, побудови, автомобільної, охоронної
Формула / Реферат:
1. Спосіб побудови входів автомобільної охоронної системи, що включає обробку вхідних сигналів, які подають з датчиків, за допомогою мікроконтролера, при цьому вхідні сигнали формують за допомогою електричних ланцюгів, кожен з яких включає два резистори - розподільний резистор і резистор, що підтягує, який відрізняється тим, що резистори, які підтягують, з величиною опору 0,75-1,0 К, короткочасно періодично підключають спочатку до напруги...