Мальтійський механізм
Номер патенту: 86710
Опубліковано: 10.01.2014
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
Формула / Реферат
Мальтійський механізм, що містить корпус, ведучий вал, кривошип з дугою запирання, палець, закріплений нерухомо на кривошипі, обертальні кінематичні пари, мальтійський хрест, який відрізняється тим, що на пальці жорстко закріплена втулка з зовнішньою сферичною поверхнею з центром сфери на продовжній осі пальця, ролик, виконаний складним із двох половинок, рухомо з'єднаних зі втулкою, утворюють з ним сферичну кінематичну пару і запресовані одне в одне та утворюють нерухоме з'єднання між собою.
Текст
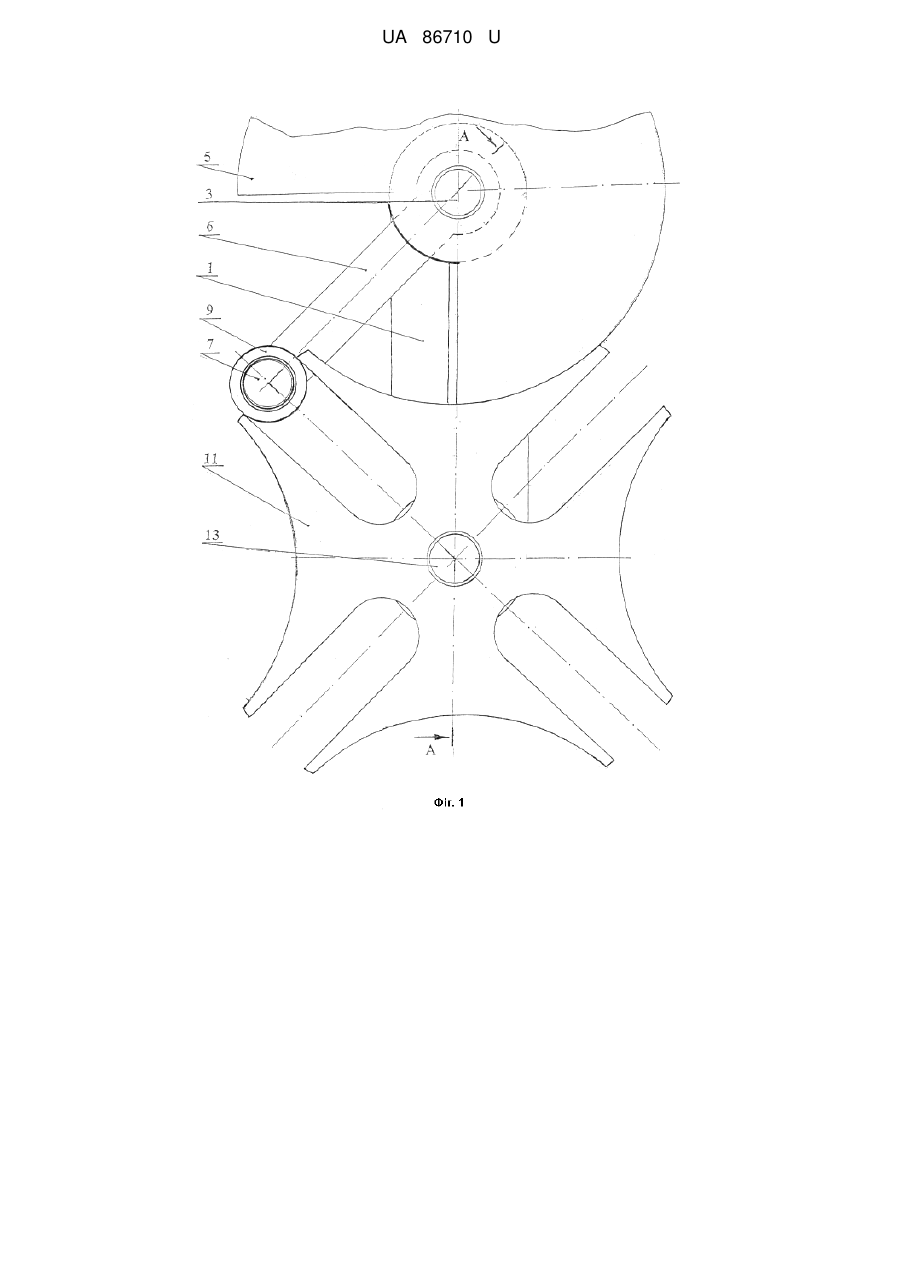
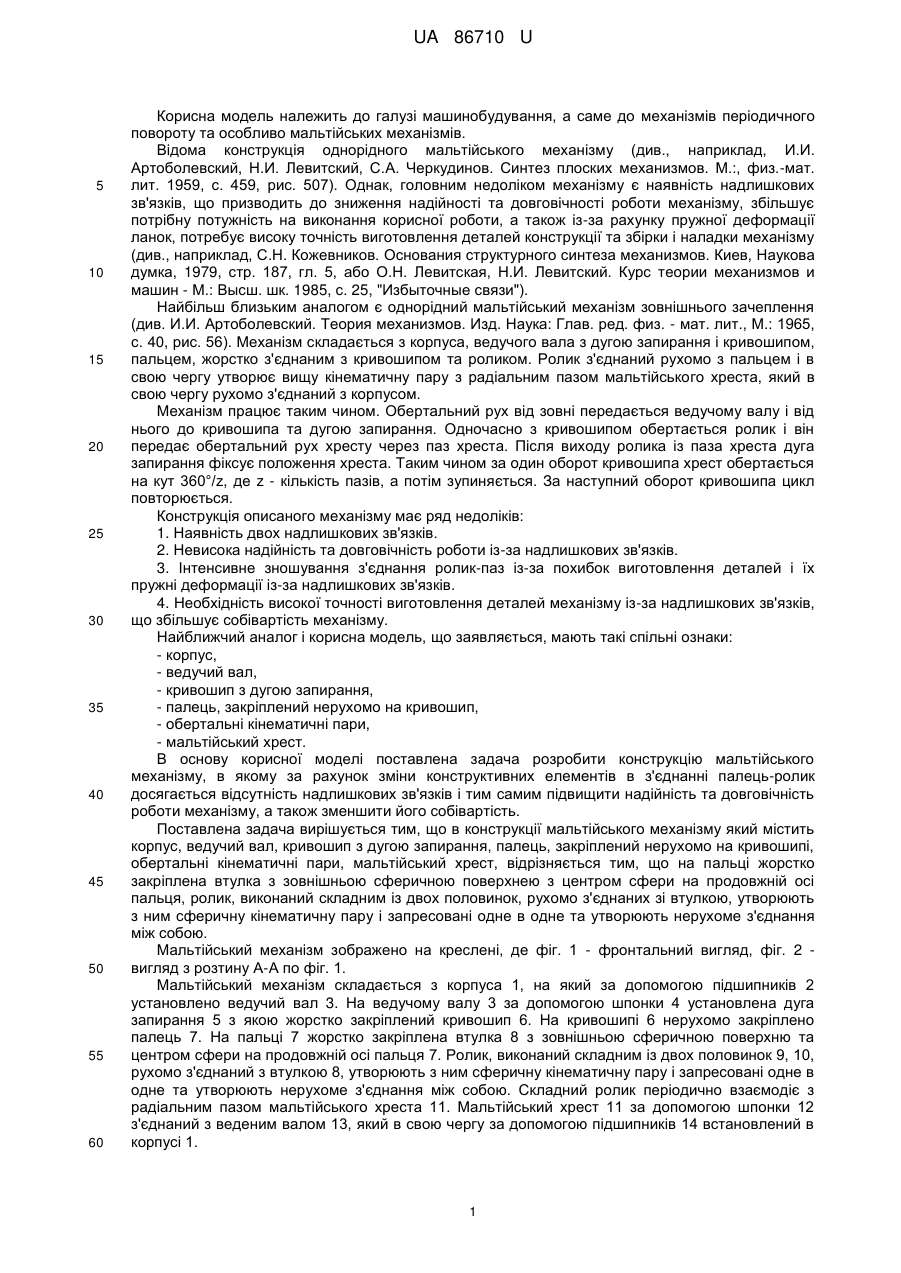
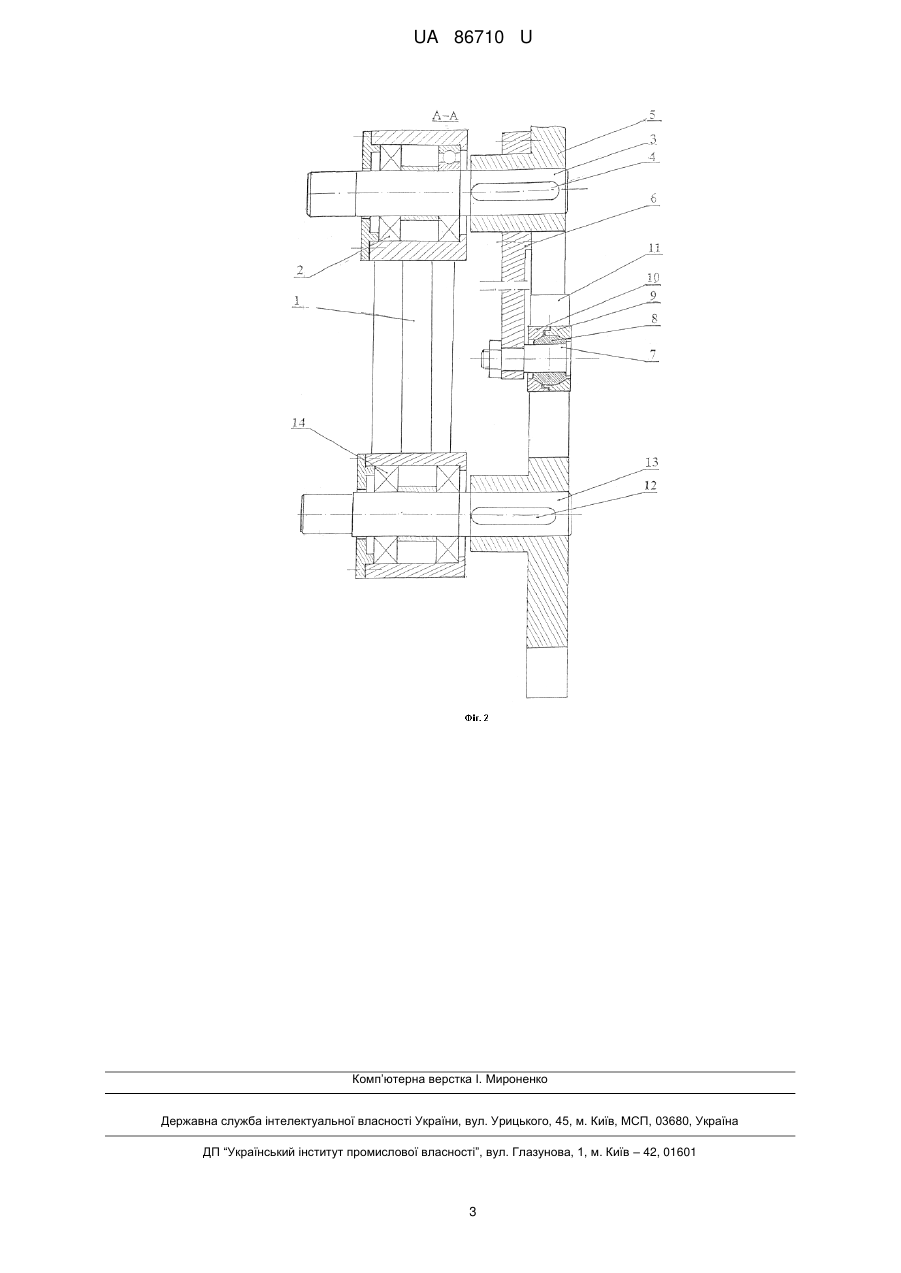
Реферат: UA 86710 U UA 86710 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до механізмів періодичного повороту та особливо мальтійських механізмів. Відома конструкція однорідного мальтійського механізму (див., наприклад, И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов. Синтез плоских механизмов. М.:, физ.-мат. лит. 1959, с. 459, рис. 507). Однак, головним недоліком механізму є наявність надлишкових зв'язків, що призводить до зниження надійності та довговічності роботи механізму, збільшує потрібну потужність на виконання корисної роботи, а також із-за рахунку пружної деформації ланок, потребує високу точність виготовлення деталей конструкції та збірки і наладки механізму (див., наприклад, С.Н. Кожевников. Основания структурного синтеза механизмов. Киев, Наукова думка, 1979, стр. 187, гл. 5, або О.Н. Левитская, Н.И. Левитский. Курс теории механизмов и машин - М.: Высш. шк. 1985, с. 25, "Избыточные связи"). Найбільш близьким аналогом є однорідний мальтійський механізм зовнішнього зачеплення (див. И.И. Артоболевский. Теория механизмов. Изд. Наука: Глав. ред. физ. - мат. лит., М.: 1965, с. 40, рис. 56). Механізм складається з корпуса, ведучого вала з дугою запирання і кривошипом, пальцем, жорстко з'єднаним з кривошипом та роликом. Ролик з'єднаний рухомо з пальцем і в свою чергу утворює вищу кінематичну пару з радіальним пазом мальтійського хреста, який в свою чергу рухомо з'єднаний з корпусом. Механізм працює таким чином. Обертальний рух від зовні передається ведучому валу і від нього до кривошипа та дугою запирання. Одночасно з кривошипом обертається ролик і він передає обертальний рух хресту через паз хреста. Після виходу ролика із паза хреста дуга запирання фіксує положення хреста. Таким чином за один оборот кривошипа хрест обертається на кут 360°/z, де z - кількість пазів, а потім зупиняється. За наступний оборот кривошипа цикл повторюється. Конструкція описаного механізму має ряд недоліків: 1. Наявність двох надлишкових зв'язків. 2. Невисока надійність та довговічність роботи із-за надлишкових зв'язків. 3. Інтенсивне зношування з'єднання ролик-паз із-за похибок виготовлення деталей і їх пружні деформації із-за надлишкових зв'язків. 4. Необхідність високої точності виготовлення деталей механізму із-за надлишкових зв'язків, що збільшує собівартість механізму. Найближчий аналог і корисна модель, що заявляється, мають такі спільні ознаки: - корпус, - ведучий вал, - кривошип з дугою запирання, - палець, закріплений нерухомо на кривошип, - обертальні кінематичні пари, - мальтійський хрест. В основу корисної моделі поставлена задача розробити конструкцію мальтійського механізму, в якому за рахунок зміни конструктивних елементів в з'єднанні палець-ролик досягається відсутність надлишкових зв'язків і тим самим підвищити надійність та довговічність роботи механізму, а також зменшити його собівартість. Поставлена задача вирішується тим, що в конструкції мальтійського механізму який містить корпус, ведучий вал, кривошип з дугою запирання, палець, закріплений нерухомо на кривошипі, обертальні кінематичні пари, мальтійський хрест, відрізняється тим, що на пальці жорстко закріплена втулка з зовнішньою сферичною поверхнею з центром сфери на продовжній осі пальця, ролик, виконаний складним із двох половинок, рухомо з'єднаних зі втулкою, утворюють з ним сферичну кінематичну пару і запресовані одне в одне та утворюють нерухоме з'єднання між собою. Мальтійський механізм зображено на креслені, де фіг. 1 - фронтальний вигляд, фіг. 2 вигляд з розтину А-А по фіг. 1. Мальтійський механізм складається з корпуса 1, на який за допомогою підшипників 2 установлено ведучий вал 3. На ведучому валу 3 за допомогою шпонки 4 установлена дуга запирання 5 з якою жорстко закріплений кривошип 6. На кривошипі 6 нерухомо закріплено палець 7. На пальці 7 жорстко закріплена втулка 8 з зовнішньою сферичною поверхню та центром сфери на продовжній осі пальця 7. Ролик, виконаний складним із двох половинок 9, 10, рухомо з'єднаний з втулкою 8, утворюють з ним сферичну кінематичну пару і запресовані одне в одне та утворюють нерухоме з'єднання між собою. Складний ролик періодично взаємодіє з радіальним пазом мальтійського хреста 11. Мальтійський хрест 11 за допомогою шпонки 12 з'єднаний з веденим валом 13, який в свою чергу за допомогою підшипників 14 встановлений в корпусі 1. 1 UA 86710 U 5 10 Мальтійський механізм працює таким чином. Рух від зовнішнього джерела (не показаному на кресленні) передається ведучому валу 3 і від нього, через шпонку 4 - дугу запирання та кривошипа. Мальтійський хрест 11 і кривошип 6 відносно один від одного, при збірці механізму, установлені таким чином, що в момент входу ролика в паз хреста 11 кут між їх продовжними осями дорівнює 90°, що забезпечує безударний вхід ролика в паз. Рух продовжується доти, поки ролик не вийде із паза хреста. Від хреста 11 рух через шпонку 12 передається веденому валу 13. Після виходу ролика із паза дуга запирання 5 фіксує положення хреста 11. Так як обертальна кінематична пара у найближчому аналозі замінена сферичною кінематичною парою, то надлишкові зв'язки в механізмі відсутні. Тоді, незалежно від того, яка похибка є між паралельністю продовжних осей обертання ведучого і веденого валів, ролик взаємодіє із пазом хреста завжди по твірній лінії ролика, що виключає деформацію як ролика, так і інших деталей механізму, і тим самим забезпечує високу надійність та довговічність його роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Мальтійський механізм, що містить корпус, ведучий вал, кривошип з дугою запирання, палець, закріплений нерухомо на кривошипі, обертальні кінематичні пари, мальтійський хрест, який відрізняється тим, що на пальці жорстко закріплена втулка з зовнішньою сферичною поверхнею з центром сфери на продовжній осі пальця, ролик, виконаний складним із двох половинок, рухомо з'єднаних зі втулкою, утворюють з ним сферичну кінематичну пару і запресовані одне в одне та утворюють нерухоме з'єднання між собою. 2 UA 86710 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 27/00
Мітки: механізм, мальтійський
Код посилання
<a href="https://ua.patents.su/5-86710-maltijjskijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Мальтійський механізм</a>
Мальтійський механізм зі збільшеним часом повороту хреста і спосіб приведення в рух хреста мальтійського механізму
Номер патенту: 83852
Опубліковано: 26.08.2008
Автори: Полюдов Олександр Миколайович, Маца Роман Степанович, Пасіка Вячеслав Романович, Кузик Назар Богданович
МПК: F16H 27/00
Мітки: механізм, мальтійського, спосіб, повороту, рух, хреста, приведення, механізму, мальтійський, збільшеним, часом
Формула / Реферат:
1. Мальтійський механізм, який складається з хреста з пазами, блокуючого пристрою і водила з пальцем, який відрізняється тим, що він містить з'єднаний з обертовим валом повзун, який розміщено у водилі, що є кулісою, на одному кінці якого встановлено ролик, який контактує з нерухомим кулачком, а на другому - палець, що має можливість контакту з прямолінійним пазом хреста. 2. Спосіб приведення в рух хреста мальтійського механізму, який...
Мальтійський механізм зі зрівноваженим хрестом
Номер патенту: 90055
Опубліковано: 25.03.2010
Автори: Полюдов Олександр Миколайович, Пасіка Вячеслав Романович
МПК: F16H 27/00
Мітки: мальтійський, механізм, зрівноваженим, хрестом
Формула / Реферат:
Мальтійський механізм зі зрівноваженим хрестом, який складається з водила змінної довжини, нерухомого кулачка і хреста, який відрізняється тим, що додатково містить пару зубчастих коліс, одне з яких жорстко посаджене на вал хреста, а друге на стояк і підпружинене пружиною розтягу, яка одним кінцем кріпиться до нього, а другим до стояка.
Мальтійський механізм

Номер патенту: 101450
Опубліковано: 25.03.2013
Автори: Коломієць Андрій Борисович, Кузнєцов Владислав Олександрович, Регей Іван Іванович
МПК: F16H 27/00
Мітки: механізм, мальтійський
Формула / Реферат:
Мальтійський механізм, що містить мальтійський хрест, водило з роликом, коромисло з роликом, що контактує з пазовим нерухомим кулачком, який відрізняється тим, що мальтійський хрест складається з диска та пластин з пазами, які приєднані до диска за допомогою осей з можливістю виконання хитного руху, а до протилежних боків цих пластин жорстко приєднані коромисла, ролики яких контактують з пазовим нерухомим кулачком та додатково...
Мальтійський механізм
Номер патенту: 58206
Опубліковано: 11.04.2011
Автори: Будзинський Валерій Володимирович, Яніцький Віталій Генріхович
МПК: F16H 27/00
Мітки: мальтійський, механізм
Формула / Реферат:
Мальтійський механізм, що містить ведучий вал з кривошипом і фіксуючою поверхнею, ведений вал з мальтійським хрестом, який відрізняється тим, що на диску, жорстко зв'язаному з хрестом, нерухомо і рівновіддалено щодо осі останнього розташовані ролики з можливістю почергового контактування двох з них з фіксуючою поверхнею в період вистою.
Багатоцівковий механізм мальтійського хреста зовнішнього зачеплення
Номер патенту: 7802
Опубліковано: 15.07.2005
Автор: Безуглий Леонід Іванович
МПК: F16H 27/00
Мітки: механізм, зачеплення, хреста, мальтійського, зовнішнього, багатоцівковий
Формула / Реферат:
1. Багатоцівковий механізм мальтійського хреста зовнішнього зачеплення, що містить водило з цівками і кінематично зв'язаний з ним мальтійський хрест з радіальними пазами, який відрізняється тим, що з метою підвищення точності відпрацьовування хрестом кута його повороту і, зокрема, точності позиціювання зв'язаних з хрестом органів верстата за рахунок усунення зазорів між цівками і пазами хреста, кожна цівка виконана у вигляді U- подібної...
Попередній патент: Пристрій для створення одновісних деформацій твердих тіл і дослідження їх електрофізичних характеристик
Наступний патент: Пристрій для передачі обертального руху між валом двигуна та валом гвинта для використання у транспортних засобах на повітряній подушці
Випадковий патент: Двоциліндрова круглов'язальна машина для виготовлення трубчастих в'язаних виробів, зокрема для виготовлення панчішних або їм подібних виробів