Спосіб виміру кута місця маловисотного об’єкта
Номер патенту: 87036
Опубліковано: 10.06.2009
Автори: Луценко Владислав Іванович, Луценко Ірина Владиславівна

Формула / Реферат
1. Спосіб виміру кута місця маловисотного об'єкта, що включає випромінювання сигналу та прийом луна-сигналу від об'єкта у вимірювальному пункті, визначення за луна-сигналом дальності та кута місця об'єкта з урахуванням поправки, обумовленої наявністю тропосферної рефракції, який відрізняється тим, що додатково приймають сигнал еталонного джерела, що перебуває на відомій дальності та кутовій висоті відносно вимірювального пункту, при цьому кут місця об'єкта обчислюють за формулою:
![]() , де
, де
![]() - кут місця об'єкта,
- кут місця об'єкта,
![]() - обмірюване значення кута місця об'єкта,
- обмірюване значення кута місця об'єкта,
![]() 0 - кут місця еталонного джерела,
0 - кут місця еталонного джерела,
![]() 0 - обмірюване значення кута місця еталонного джерела,
0 - обмірюване значення кута місця еталонного джерела,
R - дальність до об'єкта,
R0 - дальність до еталонного джерела.
2. Спосіб за п. 1, який відрізняється тим, що як еталонне джерело використовують встановлені на щоглах відбивачі або відбиття від місцевого предмета, а кут місця еталонного джерела щодо вимірювального пункту визначають з залежності
![]() де
де
h0 - відома висота,
R0 - дальність до відбивача або місцевого предмета від вимірювального пункту.
3. Спосіб за п. 1, який відрізняється тим, що як еталонне джерело використовують випромінювання штучного супутника Землі або відповідач, встановлений на аерокосмічному носії, причому дальність до еталонного джерела визначають з залежності
![]() де
де
h0 - ефективна товщина ділянки тропосфери до еталонного джерела,
![]() 0 - відомий дійсний кут місця еталонного джерела.
0 - відомий дійсний кут місця еталонного джерела.
Текст
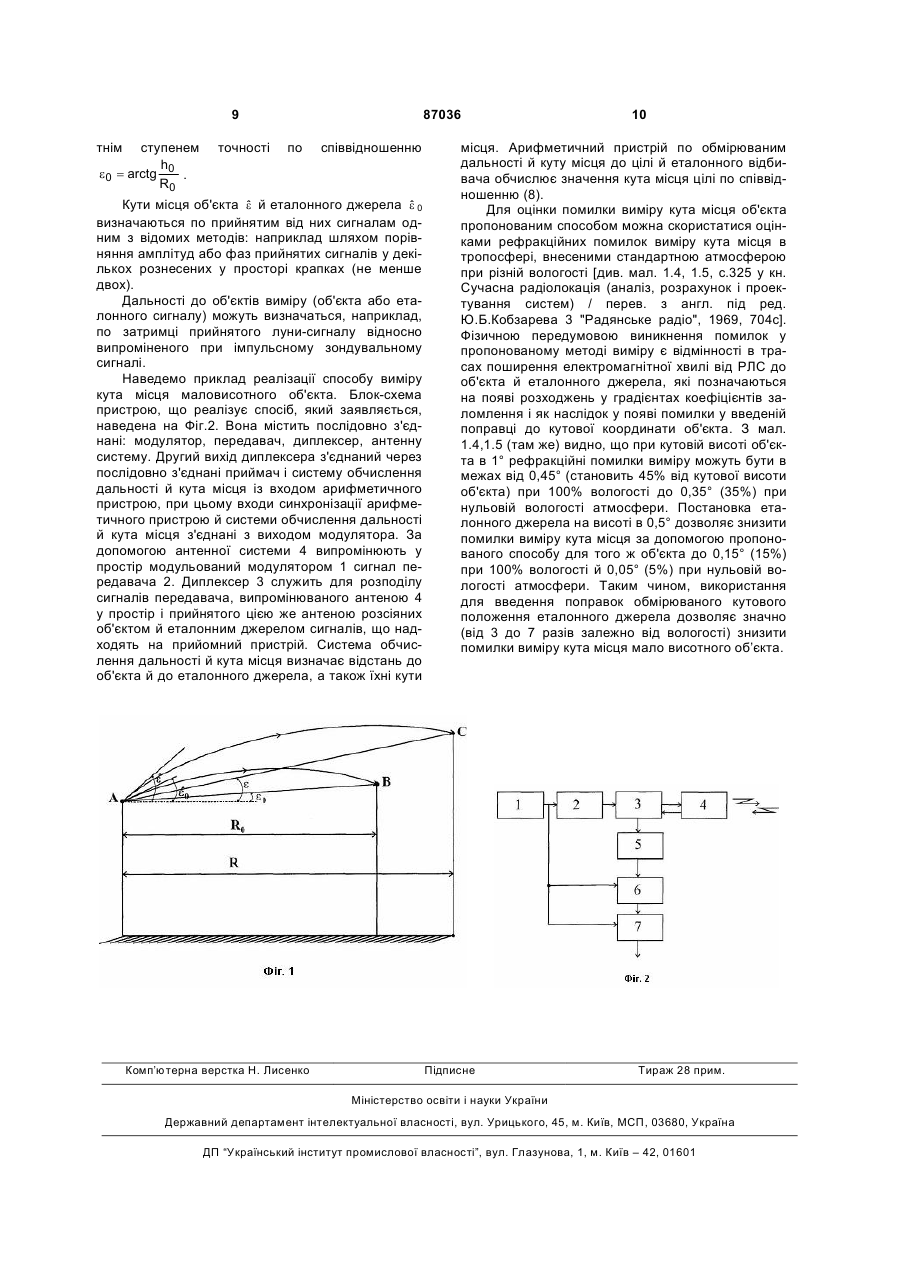
1. Спосіб виміру кута місця маловисотного об'єкта, що включає випромінювання сигналу та прийом луна-сигналу від об'єкта у вимірювальному пункті, визначення за луна-сигналом дальності та кута місця об'єкта з урахуванням поправки, обумовленої наявністю тропосферної рефракції, який відрізняється тим, що додатково приймають сигнал еталонного джерела, що перебуває на відомій дальності та кутовій висоті відносно вимірювального пункту, при цьому кут місця об'єкта обчислюють за формулою: R ˆ ˆ e=e+ (e 0 - e 0 ) де R0 , 2 3 Відомі способи пеленгування маловисотних об'єктів в умовах багатопроменевості й тропосферної рефракції. Так спосіб [див. Dax P.R. Keep track of cort angle fluing attack Microwaves N4, 1976, v15, April R.P. 36-53] заснований на частковому придушенні відбитих поверхнею розподілу сигналів діаграмою спрямованості антени. Кут місця маловисотного об'єкта виміряється позавісьовим методом. Для цього здійснюється випромінювання сигналу, прийом луни-сигналу об'єкта й по ньому - визначення дальності й кута місця, причому кут місця об'єкта визначається моноімпульсним методом шляхом ділення різницевого сигналу двох антен, діаграми спрямованості яких рознесені у вертикальній площині, на їхній сумарний сигнал з наступним виділенням з отриманої частки дійсної частини, що після множення на крутість пеленгаційної характеристики дає оцінку відхилення цілі щодо лінії візування. Рівносигнальний напрямок антени, що визначає положення лінії візування в просторі, фіксується під кутом (0.7... ...08) Q 0,85 , де Q05 - ширина діаграми спрямованості антени. Кут місця об'єкта визначається через кут фіксації лінії візування, з якого віднімається кут відхилення об'єкта щодо лінії візування. Помилки визначення кута місця маловисотного об'єкта при позавісьовому методі виміру зменшуються, оскільки відбувається часткове придушення відбиттів, що заважають, від поверхні, яка підстиляє, сумарною діаграмою спрямованості пеленгатора. Позавісьовий спосіб виміру кута місця можна реалізувати як на основі моноімпульсного методу пеленгування або методу пеленгування з конічним скануванням променя чи шляхом фіксації положення лінії візування. Однак, поряд зі зниженням помилок пеленгування кута місця й підвищеної стійкості при супроводі джерела під малими кутами при позавісьовому способу є і ряд недоліків. Розглянутий спосіб є прямо відліковим, тобто способом з розімкнутою петлею зворотного зв'язку системи автосупроводження. Тому йому властиві недоліки характерні прямо відліковим способам пеленгування, а саме необхідність точного знання пеленгаційної характеристики. Помилки її виміру безпосередньо входять у похибки визначення кута місця. Крім того, даний спосіб не дозволяє зменшити помилки, обумовлені тропосферною рефракцією. Відомий спосіб виміру кута місця маловисотного об'єкта, [див. В.Миколаїв, Зенітні артилерійські комплекси ближньої дії. / «Закордонний військовий огляд», М.: «Червона Зірка», 1989, №2, с.6970] що включає випромінювання сигналу, прийом луни-сигналу цілі й по ньому визначення кута місця й дальності до цілі, наведення по розрахованих повних кутах артустановки, здійснення за допомогою пристрільної черги автоматичного калібрування комплексу, що дозволяє виключити систематичні похибки виміру кута місця стрілянини до приходу цілі на дистанцію перехоплення, за рахунок здійснення автоматичної корекції кутової розбіжності між снопом траєкторій снарядів і ціллю. Описаний спосіб дозволяє знизити похибки виміру кута місця цілі, обумовлені як багатопроме 87036 4 невим поширенням так і тропосферною рефракцією. Це досягається за рахунок виміру дальності й кутових координат снарядів пробної серії, побудова по ним снопа траєкторій, а потім середньої траєкторії, щодо якої здійснюється вимір неузгодженості кутового положення цілі щодо обмірюваного значення, що дозволяє здійснити його корекцію. Однак і даний спосіб виміру кута місця маловисотного об'єкта має недолік. Введення поправок кутового положення об'єкта здійснюється після виміру параметрів пристрільної черги, що може бути здійснено лише після виміру кутових координат об'єкта. Це погіршує оперативність одержання оцінок дійсного кутового положення об'єкта і як наслідок приводить до зростання помилок виміру. Даний спосіб дозволяє досить точно виміряти кут місця об'єктів при невеликих дальностях до них. Для існуючих зенітних артилерійських систем США «Вулкан-Фаланкс», «Голкіпер» максимальні робочі дальності становлять 1.8... 1.5км (див. там же). При збільшенні дальності зростає час прольоту пристрільної черги по трасі й відповідно збільшується час до одержання поправок кута місця цілі. Це приводить до того, що отримані поправки застарівають і не дозволяють здійснити ефективну кореляцію оцінки пеленга кута місця. Крім того, внаслідок розсіювання снарядів пристрільної черги, що становить біля 1,2мрад (див. там же) помилка оцінки кутового положення лінії візування при довжині черги 2...3сек. (140-210 снарядів) становить близько (0.12...0.2)мрад і порівняна з помилкою виміру пеленга кута місця, обумовленою тропосферною рефракцією, що не дозволяє істотно її знизити. Найближчим аналогом (прототипом) по технічній сутності і позитивному ефекту, що досягаються, є спосіб виміру кута місця маловисотного об'єкта, [див. Б.Р.Бин, Е.Д.Даттон Радіометеорологія Л.: «Гідрометеорологічне видавництво», 1971, з 229 рис. 8.16.], що складається у випромінюванні сигналу, прийомі луни - сигналу об'єкта й по ньому визначенні кута місця й дальності до об'єкта, вимірі коефіцієнта заломлення тропосфери у поверхні землі в місці розташування РЛС і введенні поправок на обміряне значення кута місця об'єкта по формулі: De = (N sa + b ) де Ns - обміряне значення коефіцієнта заломлення тропосфери у поверхні землі, а a i b сталі, обчислені методом найменших квадратів з використанням стандартного набору профілів показника заломлення в залежності від обмірюваного кута місця об'єкта й дальності до нього. При дальності 72.5км кутовій висоті об'єкта e @ 18 мрд, значення постійних становлять a = 0.0102, b = - 1,5. Аналізований спосіб виміру кута місця маловисотного об'єкта дозволяє за рахунок введення поправок знизити помилки, обумовлені тропосферною рефракцією. Причому ці поправки можуть бути отримані до входу об'єкта в зону дії РЛС. При цьому в порівнянні з раніше розглянутим способом, заснованому на пробній серії, підвищується оперативність одержання оцінок кута місця, що вияв 5 ляється досить істотним при вимірі координат швидкісних об'єктів. Однак і заданий спосіб має недолік. Для одержання виправлень використовують значення показника заломлення тропосфери в місці розташування РЛС. Однак показник заломлення тропосфери на інших ділянках траси «РЛС-об'єкт» може істотно відрізнятися від обмірюваного, і це знижує точність обчислення (прогнозу) поправок і в остаточному підсумку виміру кута місця. Крім того, у розглянутому способі вхідні у формулу для поправок коефіцієнти a, b розраховуються на підставі набору стандартних профілів. Однак реальні профілі показника заломлення, як правило, відрізняються від стандартних, що приводить також до погіршення прогнозованого значення рефракційної поправки й одержаних оцінок кута місця маловисотного об'єкта. В основу винаходу поставлена задача - удосконалити спосіб виміру кута місця маловисотного об'єкта шляхом введення поправок в вимірюване значення з урахуванням результатів виміру кута місця джерела, яке перебуває на відомій кутовій висоті, що приводить до підвищення точності виміру кута місця й одночасно із цим забезпечує оперативність одержання поправок кутових координат об'єктів. Зазначена задача вирішується за рахунок того, що у відомому способі виміру кута місця маловисотного об'єкта, що включає випромінювання сигналу, прийом луни - сигналу об'єкта й по ньому визначення дальності й кута місця об'єкта з урахуванням поправки, обумовленої наявністю тропосферної рефракції, додатково приймають сигнал еталонного джерела, що перебуває на відомій дальності й кутовій висоті відносно вимірювального пункту, й кут місця об'єкта обчислюють по формулі: R ˆ ˆ e=e+ (e0 - e0 ) R0 де e - кут місця об'єкта; ˆ e - обмірюване значення кута місця об'єкта; e 0 - кут місця еталонного джерела; ˆ e 0 - обмірюване значення кута місця еталонного джерела; R - дальність до об'єкта; R0 - дальність до еталонного джерела; Як еталонне джерело можна використати установлені на щоглах відбивачі або відбиття від місцевості, або випромінювання штучного супутника Землі або відповідач, встановлений на аерокосмічному носії. Дійсний кут місця еталонного джерела щодо вимірювального пункту визначається як: h e0 = arctg 0 , R0 де h0 - висота еталонного джерела щодо вимірювального пункту. Коли як еталонне джерело використовують випромінювання штучного супутника Землі під дальністю розуміють величину 87036 6 R0 = h0 , tge 0 де h0 - ефективна товщина ділянки тропосфери до нього. При цьому його дійсний кут місця e 0 відомий. Порівняння способу, що заявляється, з відомими показує, що операції прийому сигналу імітатора цілі, що перебуває на відомій дальності й висоті щодо вимірювального пункту, широко застосовуються в способах виміру радіолокаційних характеристик цілей, зокрема вимірах ефективних поверхонь розсіювання (ЕПР), для автоматичного калібрування. Відоме використання сигналу луни імітатора цілі для оцінки його кутової висоти й зіставлення його із дійсною кутовою висотою, що дозволяє виявити вплив тропосферної рефракції на кути приходу радіохвиль. Однак їхнє введення в зазначеній послідовності й у сукупності з іншими операціями приводить до появи в способі виміру кута місця маловисотного об'єкта, що заявляється, нової якості, не властивої відомим способам. Вона досягається за рахунок спільної обробки оцінок кута місця еталонного джерела та об'єкта, отриманих по прийнятим від них сигналам. Радіопросвічування траси до еталонного джерела дозволяє одержати дані про рефракційні поправки його кута місця, перерахувати їх через співвідношення дальності в рефракційну поправку й кут місця об'єкта, чим і забезпечити більш високу точність його виміру. При цьому для одержання рефракційних поправок кута місця використовуються результати виміру кута місця еталонного джерела при відомій його дійсній кутовій висоті, причому виміри проводяться по прийнятому сигналу аналогічно як і для об'єкта. Цим забезпечується підвищення оперативності одержання поправок кутових координат. На відміну від способу-прототипу, що використовує для одержання поправок виміри параметрів тропосфери в одній із точок траси і їхнє перерахування у поправку, тобто непрямий метод, заявлений спосіб використовує для формування виправлень безпосередні виміри позірного кута місця еталонного джерела з відомою кутовою висотою, для чого здійснюється просвічування всієї траси до еталонного джерела, чим і забезпечується більша статистична вірогідність одержуваних оцінок. Сутність винаходу пояснюється кресленнями. На Фіг.1 зображена геометрія траси виміру; на Фіг.2: структурна схема пристрою, що реалізує спосіб виміру кута місця маловисотного об'єкта. Спосіб виміру кута місця маловисотного об'єкта полягає у випромінюванні сигналу, прийомі луни - сигналу об'єкта й по ньому визначенні дальності до нього й кута місця об'єкта з урахуванням поправки, обумовленої наявністю тропосферної рефракції. Додатково приймають сигнал еталонного джерела, що перебуває на відомій висоті відносно вимірювального пункту. По прийнятому від еталонного джерела сигналу визначають кут місця еталонного джерела й дальність до нього, а кут місця об'єкта обчислюють по формулі: R ˆ ˆ e=e+ (e0 - e0 ) (1) R0 7 де e - кут місця об'єкта; ˆ e - обмірюване значення кута місця об'єкта; e 0 - кут місця еталонного джерела; ˆ e 0 - обмірюване значення кута місця еталонного джерела; R - дальність до об’єкта; R0 - дальність до еталонного джерела; Як еталонне джерело використовують спеціально встановлені на щоглах еталонні відбивачі або відбиття, прийняті від місцевості, наприклад від морських хвиль. При цьому їхня кутова висота визначається співвідношенням: h e0 = arctg 0 , R0 де h0 - висота, a R0 дальність еталонного джерела щодо вимірювального пункту. Крім того, як еталонне джерело може використовуватись випромінювання штучних супутників Землі або відповідач, установлений на аерокосмічному носії, причому під дальністю до еталонного джерела розуміють величину h R0 = 0 , tge0 де h0 – ефективна товщина ділянки тропосфери до нього, а його істинний кут місця e 0 відомий. Дальність до еталонного джерела, розташованого на супутнику, може бути визначена по іншому еталонному джерелу еталонної цілі з використанням співвідношення ˆ ˆ R 0 = Rэт (e0 - e0 ) / (eэт - eэт ) , де RЭТ , e ЭТ - відомі дальності й кутова коорˆ дината еталонного відбивача, а e ЭТ - його виміряний кут місця. Вимірювальний пункт (Фіг.1) розташовується в крапці А, імітатор цілі -у крапці В на дальності R0, маловисотна ціль - у крапці С на дальності R. Внаслідок тропосферної рефракції випромінений з вимірювального пункту сигнал поширюється до імітатора (крапка В) по дузі АВ і цілі (крапка С) по дузі АС. При цьому уявні напрямки на імітатор і ціль, визначені кутами дотичних до траєкторії відповідних променів, будуть відрізнятися від дійсних кутів імітатора й цілі на величину, визначену рефракційною поправкою. Траєкторія поширення променів по трасах «РЛС-імітатор» й «РЛС-об'єкт» визначається характеристиками тропосфери в межах області суттєвої для поширення. їхні максимальні розміри в поперечнику посередині трас визначаються співвідношенням: r » 2Rl , де r - радіус істотної зони, l - довжина хвилі, R - відстань між кореспондуючими пунктами. У діапазоні надвисоких частот (довжина хвилі l =1...100мм) і дистанції до цілі не більше 25км, максимальні розміри зони суттєвої для поширення становлять 7...70м. Причому для маловисотних цілей, що перебувають у межах прямої видимості РЛС, через малі розміри області простору суттєвої для поширення радіохвиль основне значення мають рефракційні 87036 8 властивості приземного шару повітря висотою не більше декількох сотень метрів. При таких висотах залежність показника заломлення в приземному шарі можна вважати лінійною функцією від висоти [див. А.И.Калінін «Поширення радіохвиль на трасах наземних і космічних ліній», М.: «Зв'язок», 1979, с.22, ф-ла 2.4.1]: e(h) @ 1 + De0 + gh (2) де e(h) - залежність діелектричної проникності тропосфери від висоти; De 0 - відхилення e від одиниці у поверхні землі; g
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angle of elevation of row-rise object
Автори англійськоюLutsenko Vladyslav Ivanovych, Lutsenko Iryna Vladyslavivna
Назва патенту російськоюСпособ измерения угла места маловысотного объекта
Автори російськоюЛуценко Владислав Иванович, Луценко Ирина Владиславовна
МПК / Мітки
МПК: G01S 1/00
Мітки: місця, виміру, кута, спосіб, об'єкта, маловисотного
Код посилання
<a href="https://ua.patents.su/5-87036-sposib-vimiru-kuta-miscya-malovisotnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру кута місця маловисотного об’єкта</a>
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Кудрик Андрій Миколайович, Бахвалов Валентин Борисович
МПК: G01S 17/00
Мітки: спосіб, цілі, виміру, кута, місця
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Спосіб виміру кута місця цілей в умовах заважаючих перевідбиттів від земної або водної (підстеляючої) поверхні
Номер патенту: 36487
Опубліковано: 27.10.2008
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Баранов Андрій Володимирович
МПК: G01S 7/28
Мітки: місця, виміру, заважаючих, умовах, водної, земної, спосіб, перевідбиттів, цілей, поверхні, кута, підстеляючої
Формула / Реферат:
Спосіб виміру кута місця цілей в умовах заважаючих перевідбиттів від земної або водної (підстеляючої) поверхні, заснований на вимірах прийнятих сигналів від цілей на виходах декількох рознесених по вертикалі антен і обчисленні кута місця на основі цих вимірів, який відрізняється тим, що вимір виконують шляхом порівняння амплітуд і фаз отриманих результатів лінійної комбінації сигналів з виходів декількох, наприклад трьох, рознесених по...
Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: цілі, місця, вимірювання, спосіб, кута, маловисотної
Формула / Реферат:
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты,...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: вимірювання, кута, наземного, цілі, радіолокатора, місця, секвентного, спосіб
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Вимірювач кута місця цілі для радіолокатора виявлення
Номер патенту: 17673
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06, G01S 13/06
Мітки: вимірювач, виявлення, радіолокатора, місця, кута, цілі
Формула / Реферат:
Измеритель угла места цели для радиолокатора обнаружения, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, отличающийся тем, что передатчик выполнен с несинусоидальным импульсным сигналом наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами пол высоте равно высоте h подъема...
Попередній патент: Хвильова електростанція
Наступний патент: Спосіб діагностики порушень функціонального стану ендотелію мікросудин у дітей
Випадковий патент: Пристрій формування змінної напруги для живлення установок індукційного нагрівання металів