Спосіб демпфірування кутових швидкостей космічного літального апарата
Номер патенту: 87065
Опубліковано: 27.01.2014
Автори: Бандура Іван Миколайович, Фірсов Сергій Миколайович, Локай Сергій Володимирович
Формула / Реферат
Спосіб демпфірування кутових швидкостей космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого включають двигуни, які створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, при величині початкової подовжньої кутової швидкості, яка не забезпечує заданий час демпфірування, забезпечують потрібну подовжню кутову швидкість для виконання заданого часу демпфірування, якщо додаткові витрати менші, ніж економія робочого тіла, а в іншому випадку, спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості, який відрізняється тим, що на початку демпфірування кожної складової кутової швидкості знаходять величину імпульсу післядії керуючого моменту, по цій величині корегують задане значення складової кутової швидкості.
Текст
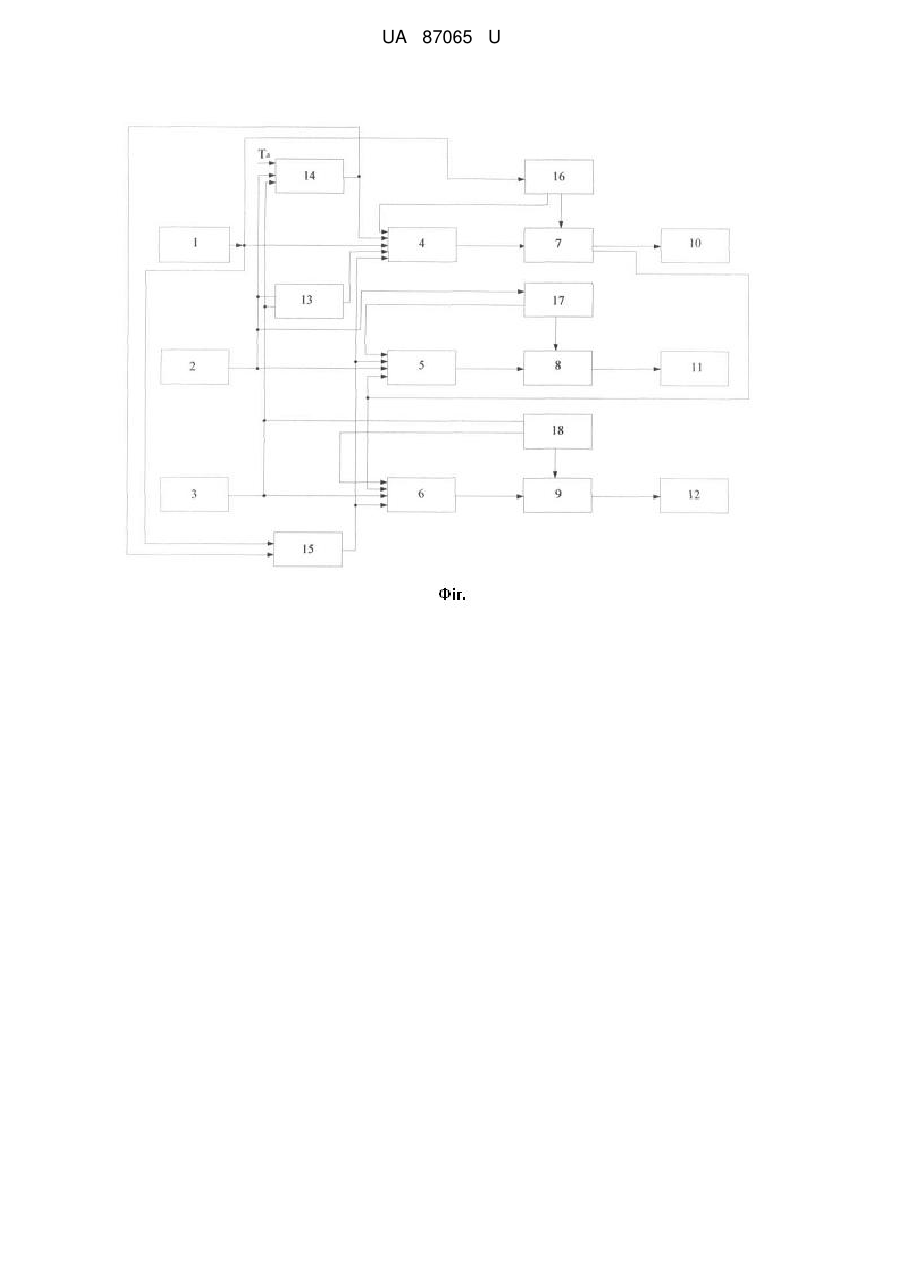
Реферат: UA 87065 U UA 87065 U 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб демпфірування кутових швидкостей космічного літального апарату з реактивними виконавчими органами по трьох осях належить до систем орієнтації і кутової стабілізації космічного літального апарату. Існує спосіб демпфірування кутових швидкостей космічного літального апарату [Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. М., "Машиностроение", 1977, с. 120-127], який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарату, включають керуючі реактивні двигуни, забезпечують одночасне демпфірування кутових швидкостей навколо трьох осей за рахунок одночасного включення керуючих двигунів у всіх каналах. Недоліками цього способу є низька точність і велика витрата робочого тіла для демпфірування кутових швидкостей. Відомий спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарату [див. Патент України на корисну модель № 11858, B64G1/24, Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, опублікований 16.01.2006 р.], який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарату, забезпечують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, забезпечують демпфірування подовжньої кутової швидкості, включають двигуни, що створюють керуючий момент навколо поперечної осі і забезпечують демпфірування поперечних кутових швидкостей. Недоліком цього способу є низька точність, а також значний час демпфірування при малих величинах початкової подовжньої кутової швидкості. Відомий спосіб демпфірування кутових швидкостей космічного літального апарату, взятий як прототип [Патент України на винахід № 84974, B64G1/24, 2008 р., опублікований 10.12.2008], який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарату і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого включають двигуни, які створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, при величині початкової подовжньої кутової швидкості, яка не забезпечує заданий час демпфірування, забезпечують потрібну подовжню кутову швидкість для виконання заданого часу демпфірування, якщо додаткові витрати менші, ніж економія робочого тіла, а в іншому випадку, спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості. Недоліком цього способу є низька точність демпфірування кутових швидкостей. В основу корисної моделі поставлено задачу підвищення точності демпфірування кутових швидкостей. Поставлена задача вирішується тим, що в способі демпфірування кутових швидкостей вісесиметричного космічного апарату, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарату і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого включають двигуни, які створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, згідно з корисною моделлю при величині початкової подовжньої кутової швидкості, яка не забезпечує заданий час демпфірування, забезпечують потрібну подовжню кутову швидкість для виконання заданого часу демпфірування, якщо додаткові витрати менші, ніж економія робочого тіла, а в іншому випадку, спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості згідно з корисною моделлю і на початку демпфірування кожної складової кутової швидкості знаходять величину імпульсу післядії керуючого моменту, по цій величині корегують задане значення складової кутової швидкості. Сутність способу пояснюється кресленням, де представлена структурна схема системи демпфірування кутових швидкостей космічного літального апарату з реактивними виконавчими органами, за допомогою якої реалізується спосіб демпфірування. Система містить датчик подовжньої кутової швидкості 1, датчик першої поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості 3, блок 4 підключення датчика 1, блок 5 підключення датчика 2, блок 6 підключення датчика 3, блок 7 керування виконавчими органами подовжнього каналу, блок 8 керування виконавчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого поперечного каналу, виконавчі органи 1 UA 87065 U 5 10 15 20 25 30 35 40 45 50 55 60 подовжнього каналу 10, виконавчі органи першого поперечного каналу 11, виконавчі органи другого поперечного каналу 12, блок 13 визначення початку демпфірування подовжньої швидкості, блок 14 визначення потрібної подовжньої кутової швидкості, блок 15 мінімізації витрат робочого тіла, блок 16 визначення імпульсу післядії в подовжньому каналі, блок 17 визначення імпульсу післядії в першому поперечному каналі, блок 18 визначення імпульсу післядії в другому поперечному каналі. Розглянемо процеси керування при демпфіруванні подовжньої і поперечних кутових швидкостей. При величині початкової подовжньої кутової швидкості, яка забезпечує потрібний час демпфірування у блоці 13 визначаються необхідні значення поперечних кутових швидкостей, при яких необхідно починати демпфірування подовжньої кутової швидкості, витримують паузу без керування до моменту, поки обмірювані поперечні кутові швидкості з датчиків 2, 3 не збіжаться з необхідними, після чого блок 13 через блоки 4 і 7 включає виконавчі органи подовжнього каналу 10, що потім виключаються блоком 7 після демпфірування подовжньої кутової швидкості. У результаті подовжня й одна з поперечних кутових швидкостей будуть малими, а друга поперечна швидкість буде дорівнювати модулю поперечної кутової швидкості. Потім по інформації з другого виходу блока 7 через блоки 5 і 8 включаються виконавчі органи 11, якщо напрямок вектора поперечної кутової швидкості збігається з першою поперечною віссю і через блоки 6, 9 включаються виконавчі органи 12, якщо напрямок поперечної кутової швидкості збігається з другою поперечною віссю. Виконавчі органи 11 виключаються блоком 8 після демпфірування першої поперечної кутової швидкості, а виконавчі органи 12 виключаються блоком 9 після демпфірування другої поперечної кутової швидкості. В результаті поперечні кутові швидкості будуть малими. Якщо величина початкової подовжньої кутової швидкості мала, то в блоці 14 визначається потрібна подовжня кутова швидкість, а в блоці 15 формуються сигнали на підключення демпфірування складових кутової швидкості, при цьому для виконання заданого часу демпфірування забезпечують потрібну подовжню кутову швидкість, якщо додаткові витрати менше економії робочого тіла, інакше спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості. Підвищення точності демпфірування розглянемо на прикладі демпфірування подовжньої кутової швидкості. На початку демпфірування подовжньої кутової швидкості блок 16, вхід якого підключений до виходу датчика подовжньої кутової швидкості 1, формує керуючий сигнал мінімальної тривалості включення виконавчих органів 10, видає його на другий вхід блоку 7 і запам'ятовує значення подовжньої кутової швидкості ω1, в момент вимикання керуючого сигналу. Через розрахунковий час дії імпульсу післядії, викликаного запізнюванням системи та інерційністю релейних виконавчих органів 10, блок 16 визначення імпульсу післядії через п'ятий вхід блоку 4 підключення датчика 1 підключає керуючий сигнал та запам'ятовує значення кутової швидкості ω2. В блоці 16 по кутовим швидкостям визначають величину імпульсу Δω=ω 1ω2 і видають це значення в блок 7 для корекції заданого розрахункового значення подовжньої кутової швидкості при якому закінчується гасіння подовжньої кутової швидкості, на задане фактичне значення Δω. Після зменшення кутової швидкості до Δω у блоці 7 обнуляють керуючий сигнал. Через те, що фактичне значення Δω відповідає реальному імпульсу післядії, кутова швидкість зменшується до нульового значення. Аналогічно підвищують точність демпфірування в поперечних каналах блок 17 визначення імпульсу післядії в першому поперечному каналі та блок 18 визначення імпульсу післядії в другому поперечному каналі. Таким чином, запропонований спосіб дозволяє забезпечити демпфірування початкових кутових швидкостей космічного літального апарату навколо трьох осей протягом заданого часу демпфірування з мінімальною витратою робочого тіла і з високою точністю демпфірування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб демпфірування кутових швидкостей космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого включають двигуни, які створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, при величині початкової подовжньої кутової швидкості, яка не забезпечує заданий час демпфірування, забезпечують потрібну подовжню кутову швидкість для виконання заданого часу демпфірування, якщо 2 UA 87065 U 5 додаткові витрати менші, ніж економія робочого тіла, а в іншому випадку, спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості, який відрізняється тим, що на початку демпфірування кожної складової кутової швидкості знаходять величину імпульсу післядії керуючого моменту, по цій величині корегують задане значення складової кутової швидкості. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBandura Ivan Mykolaiovych, Firsov Serhii Mykolaiovych
Автори російськоюБандура Иван Николаевич, Фирсов Сергей Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: спосіб, демпфірування, літального, швидкостей, апарата, космічного, кутових
Код посилання
<a href="https://ua.patents.su/5-87065-sposib-dempfiruvannya-kutovikh-shvidkostejj-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб демпфірування кутових швидкостей космічного літального апарата</a>
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 86640
Опубліковано: 10.01.2014
Автори: Глушковський Олександр Олександровіч, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: спосіб, кутових, космічного, демпфірування, літального, вісесиметричного, апарата, швидкостей
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесимеричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку демпфірування подовжньої кутової...
Спосіб демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 84974
Опубліковано: 10.12.2008
Автори: Задорожня Марія Олександрівна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, спосіб, апарата, швидкостей, космічного, демпфірування, кутових
Формула / Реферат:
Спосіб демпфірування кутових швидкостей космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, літального, кутових, апарата, спосіб, швидкостей, вісесиметричного, демпфірування
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: апарата, демпфірування, швидкостей, кутових, система, літального, космічного
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Снагіцький Сергій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: швидкостей, система, апарата, космічного, демпфірування, кутових, вісесиметричного, літального
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Попередній патент: Пневматичний привід наземної катапульти з вільним поршнем
Наступний патент: Формувач періодичної послідовності кодових серій імпульсів з програмованими параметрами
Випадковий патент: Пристрій для переміщення люльки