Статичні автомобільні ваги для поосьового зважування під час руху
Номер патенту: 87873
Опубліковано: 25.02.2014
Автори: Татарінов Олексій Едуардович, Бабак Олег Володимирович, Суровцев Ігор Вікторович, Крижановський Юрій Антонович

Формула / Реферат
Статичні автомобільні ваги для поосьового зважування під час руху, які містять вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою, які відрізняються тим, що система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї, причому вихід цифрового відлікового пристрою каналом зв'язку під'єднаний до входів підсистем зважування при заїзді і з'їзді з вантажної платформи, що з'єднані між собою інформаційними входами-виходами, виходи яких каналом зв'язку підключені до системи обробки і відтворення інформації.
Текст
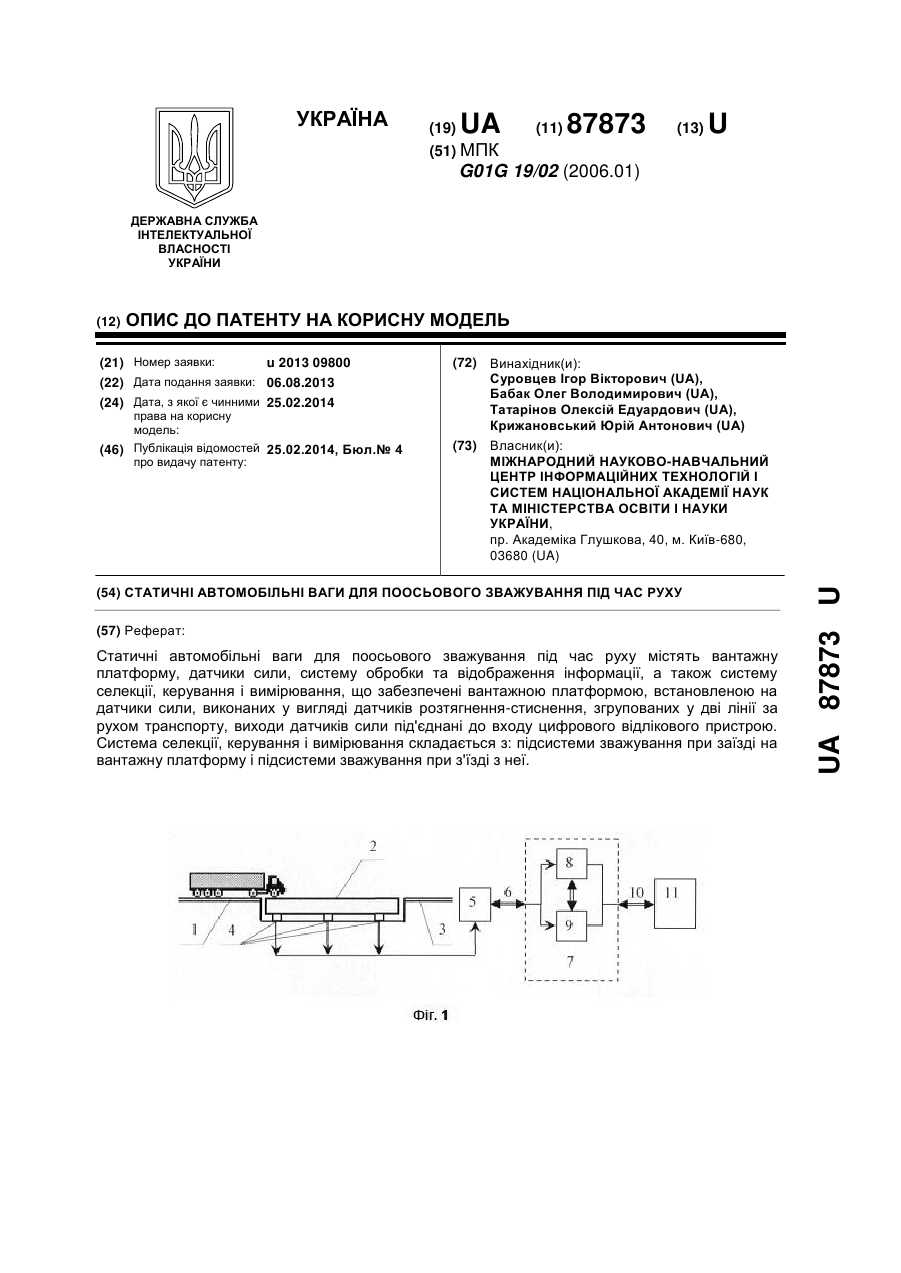
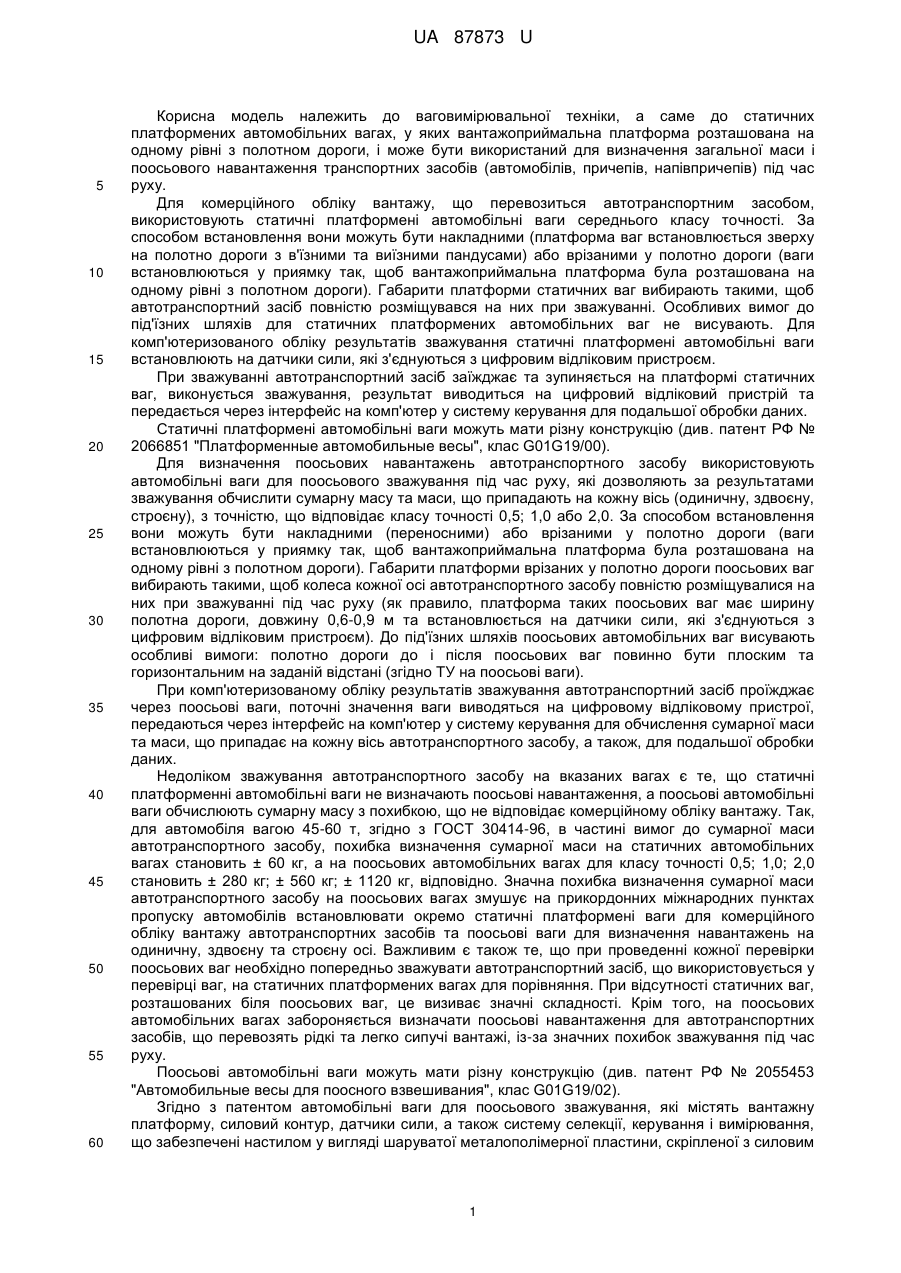
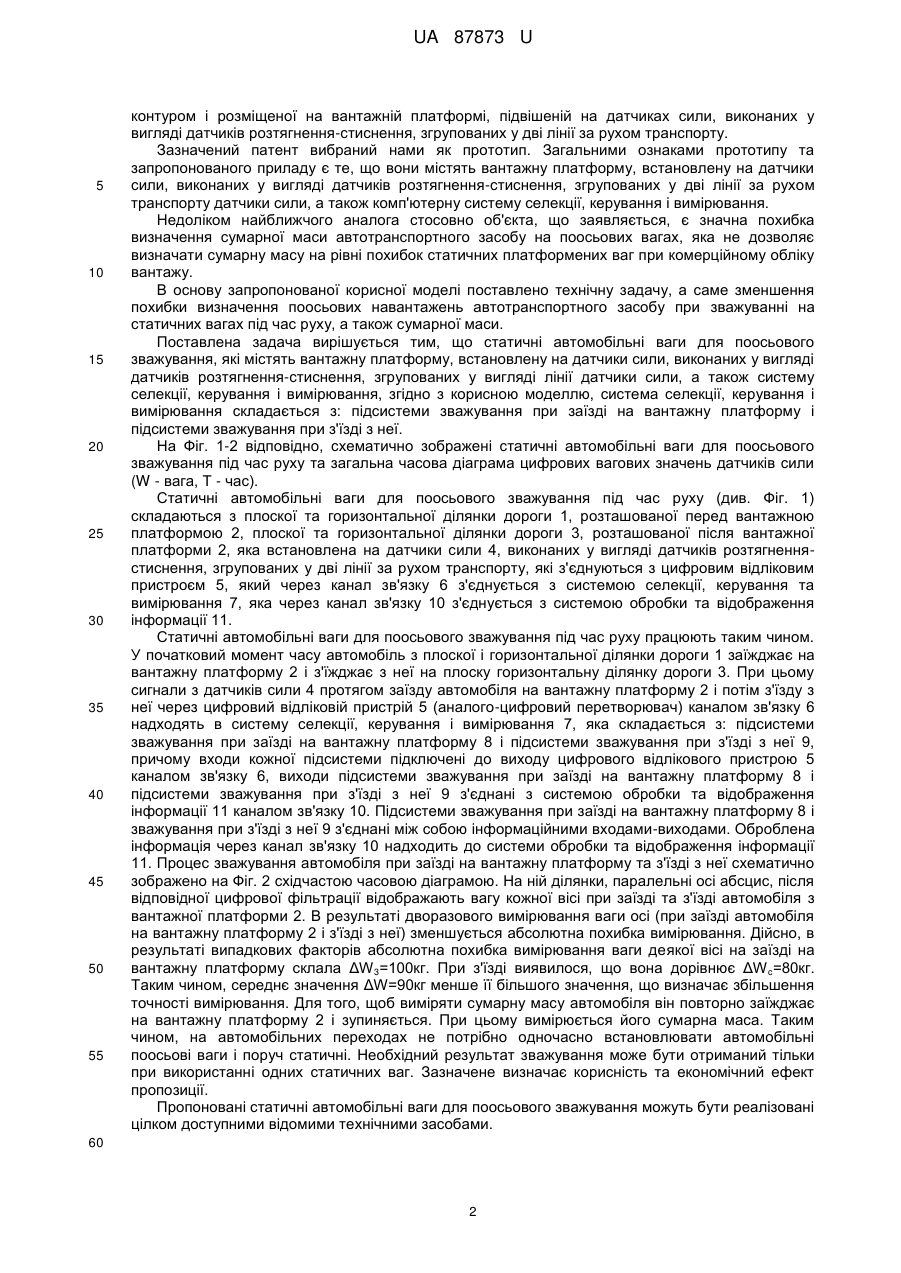
Реферат: Статичні автомобільні ваги для поосьового зважування під час руху містять вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою. Система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї. UA 87873 U (12) UA 87873 U UA 87873 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до ваговимірювальної техніки, а саме до статичних платформених автомобільних вагах, у яких вантажоприймальна платформа розташована на одному рівні з полотном дороги, і може бути використаний для визначення загальної маси і поосьового навантаження транспортних засобів (автомобілів, причепів, напівпричепів) під час руху. Для комерційного обліку вантажу, що перевозиться автотранспортним засобом, використовують статичні платформені автомобільні ваги середнього класу точності. За способом встановлення вони можуть бути накладними (платформа ваг встановлюється зверху на полотно дороги з в'їзними та виїзними пандусами) або врізаними у полотно дороги (ваги встановлюються у приямку так, щоб вантажоприймальна платформа була розташована на одному рівні з полотном дороги). Габарити платформи статичних ваг вибирають такими, щоб автотранспортний засіб повністю розміщувався на них при зважуванні. Особливих вимог до під'їзних шляхів для статичних платформених автомобільних ваг не висувають. Для комп'ютеризованого обліку результатів зважування статичні платформені автомобільні ваги встановлюють на датчики сили, які з'єднуються з цифровим відліковим пристроєм. При зважуванні автотранспортний засіб заїжджає та зупиняється на платформі статичних ваг, виконується зважування, результат виводиться на цифровий відліковий пристрій та передається через інтерфейс на комп'ютер у систему керування для подальшої обробки даних. Статичні платформені автомобільні ваги можуть мати різну конструкцію (див. патент РФ № 2066851 "Платформенные автомобильные весы", клас G01G19/00). Для визначення поосьових навантажень автотранспортного засобу використовують автомобільні ваги для поосьового зважування під час руху, які дозволяють за результатами зважування обчислити сумарну масу та маси, що припадають на кожну вісь (одиничну, здвоєну, строєну), з точністю, що відповідає класу точності 0,5; 1,0 або 2,0. За способом встановлення вони можуть бути накладними (переносними) або врізаними у полотно дороги (ваги встановлюються у приямку так, щоб вантажоприймальна платформа була розташована на одному рівні з полотном дороги). Габарити платформи врізаних у полотно дороги поосьових ваг вибирають такими, щоб колеса кожної осі автотранспортного засобу повністю розміщувалися на них при зважуванні під час руху (як правило, платформа таких поосьових ваг має ширину полотна дороги, довжину 0,6-0,9 м та встановлюється на датчики сили, які з'єднуються з цифровим відліковим пристроєм). До під'їзних шляхів поосьових автомобільних ваг висувають особливі вимоги: полотно дороги до і після поосьових ваг повинно бути плоским та горизонтальним на заданій відстані (згідно ТУ на поосьові ваги). При комп'ютеризованому обліку результатів зважування автотранспортний засіб проїжджає через поосьові ваги, поточні значення ваги виводяться на цифровому відліковому пристрої, передаються через інтерфейс на комп'ютер у систему керування для обчислення сумарної маси та маси, що припадає на кожну вісь автотранспортного засобу, а також, для подальшої обробки даних. Недоліком зважування автотранспортного засобу на вказаних вагах є те, що статичні платформенні автомобільні ваги не визначають поосьові навантаження, а поосьові автомобільні ваги обчислюють сумарну масу з похибкою, що не відповідає комерційному обліку вантажу. Так, для автомобіля вагою 45-60 т, згідно з ГОСТ 30414-96, в частині вимог до сумарної маси автотранспортного засобу, похибка визначення сумарної маси на статичних автомобільних вагах становить ± 60 кг, а на поосьових автомобільних вагах для класу точності 0,5; 1,0; 2,0 становить ± 280 кг; ± 560 кг; ± 1120 кг, відповідно. Значна похибка визначення сумарної маси автотранспортного засобу на поосьових вагах змушує на прикордонних міжнародних пунктах пропуску автомобілів встановлювати окремо статичні платформені ваги для комерційного обліку вантажу автотранспортних засобів та поосьові ваги для визначення навантажень на одиничну, здвоєну та строєну осі. Важливим є також те, що при проведенні кожної перевірки поосьових ваг необхідно попередньо зважувати автотранспортний засіб, що використовується у перевірці ваг, на статичних платформених вагах для порівняння. При відсутності статичних ваг, розташованих біля поосьових ваг, це визиває значні складності. Крім того, на поосьових автомобільних вагах забороняється визначати поосьові навантаження для автотранспортних засобів, що перевозять рідкі та легко сипучі вантажі, із-за значних похибок зважування під час руху. Поосьові автомобільні ваги можуть мати різну конструкцію (див. патент РФ № 2055453 "Автомобильные весы для поосного взвешивания", клас G01G19/02). Згідно з патентом автомобільні ваги для поосьового зважування, які містять вантажну платформу, силовий контур, датчики сили, а також систему селекції, керування і вимірювання, що забезпечені настилом у вигляді шаруватої металополімерної пластини, скріпленої з силовим 1 UA 87873 U 5 10 15 20 25 30 35 40 45 50 55 контуром і розміщеної на вантажній платформі, підвішеній на датчиках сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту. Зазначений патент вибраний нами як прототип. Загальними ознаками прототипу та запропонованого приладу є те, що вони містять вантажну платформу, встановлену на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту датчики сили, а також комп'ютерну систему селекції, керування і вимірювання. Недоліком найближчого аналога стосовно об'єкта, що заявляється, є значна похибка визначення сумарної маси автотранспортного засобу на поосьових вагах, яка не дозволяє визначати сумарну масу на рівні похибок статичних платформених ваг при комерційному обліку вантажу. В основу запропонованої корисної моделі поставлено технічну задачу, а саме зменшення похибки визначення поосьових навантажень автотранспортного засобу при зважуванні на статичних вагах під час руху, а також сумарної маси. Поставлена задача вирішується тим, що статичні автомобільні ваги для поосьового зважування, які містять вантажну платформу, встановлену на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у вигляді лінії датчики сили, а також систему селекції, керування і вимірювання, згідно з корисною моделлю, система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї. На Фіг. 1-2 відповідно, схематично зображені статичні автомобільні ваги для поосьового зважування під час руху та загальна часова діаграма цифрових вагових значень датчиків сили (W - вага, Т - час). Статичні автомобільні ваги для поосьового зважування під час руху (див. Фіг. 1) складаються з плоскої та горизонтальної ділянки дороги 1, розташованої перед вантажною платформою 2, плоскої та горизонтальної ділянки дороги 3, розташованої після вантажної платформи 2, яка встановлена на датчики сили 4, виконаних у вигляді датчиків розтягненнястиснення, згрупованих у дві лінії за рухом транспорту, які з'єднуються з цифровим відліковим пристроєм 5, який через канал зв'язку 6 з'єднується з системою селекції, керування та вимірювання 7, яка через канал зв'язку 10 з'єднується з системою обробки та відображення інформації 11. Статичні автомобільні ваги для поосьового зважування під час руху працюють таким чином. У початковий момент часу автомобіль з плоскої і горизонтальної ділянки дороги 1 заїжджає на вантажну платформу 2 і з'їжджає з неї на плоску горизонтальну ділянку дороги 3. При цьому сигнали з датчиків сили 4 протягом заїзду автомобіля на вантажну платформу 2 і потім з'їзду з неї через цифровий відліковій пристрій 5 (аналого-цифровий перетворювач) каналом зв'язку 6 надходять в систему селекції, керування і вимірювання 7, яка складається з: підсистеми зважування при заїзді на вантажну платформу 8 і підсистеми зважування при з'їзді з неї 9, причому входи кожної підсистеми підключені до виходу цифрового відлікового пристрою 5 каналом зв'язку 6, виходи підсистеми зважування при заїзді на вантажну платформу 8 і підсистеми зважування при з'їзді з неї 9 з'єднані з системою обробки та відображення інформації 11 каналом зв'язку 10. Підсистеми зважування при заїзді на вантажну платформу 8 і зважування при з'їзді з неї 9 з'єднані між собою інформаційними входами-виходами. Оброблена інформація через канал зв'язку 10 надходить до системи обробки та відображення інформації 11. Процес зважування автомобіля при заїзді на вантажну платформу та з'їзді з неї схематично зображено на Фіг. 2 східчастою часовою діаграмою. На ній ділянки, паралельні осі абсцис, після відповідної цифрової фільтрації відображають вагу кожної вісі при заїзді та з'їзді автомобіля з вантажної платформи 2. В результаті дворазового вимірювання ваги осі (при заїзді автомобіля на вантажну платформу 2 і з'їзді з неї) зменшується абсолютна похибка вимірювання. Дійсно, в результаті випадкових факторів абсолютна похибка вимірювання ваги деякої вісі на заїзді на вантажну платформу склала ΔW 3=100кг. При з'їзді виявилося, що вона дорівнює ΔW c=80кг. Таким чином, середнє значення ΔW=90кг менше її більшого значення, що визначає збільшення точності вимірювання. Для того, щоб виміряти сумарну масу автомобіля він повторно заїжджає на вантажну платформу 2 і зупиняється. При цьому вимірюється його сумарна маса. Таким чином, на автомобільних переходах не потрібно одночасно встановлювати автомобільні поосьові ваги і поруч статичні. Необхідний результат зважування може бути отриманий тільки при використанні одних статичних ваг. Зазначене визначає корисність та економічний ефект пропозиції. Пропоновані статичні автомобільні ваги для поосьового зважування можуть бути реалізовані цілком доступними відомими технічними засобами. 60 2 UA 87873 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Статичні автомобільні ваги для поосьового зважування під час руху, які містять вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою, які відрізняються тим, що система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї, причому вихід цифрового відлікового пристрою каналом зв'язку під'єднаний до входів підсистем зважування при заїзді і з'їзді з вантажної платформи, що з'єднані між собою інформаційними входами-виходами, виходи яких каналом зв'язку підключені до системи обробки і відтворення інформації. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюSurovtsev Ihor Viktorovych, Babak Oleh Volodymyrovych, Tatarinov Oleksii Eduardovych
Автори російськоюСуровцев Игорь Викторович, Бабак Олег Владимирович, Татаринов Алексей Эдуардович
МПК / Мітки
МПК: G01G 19/02
Мітки: ваги, зважування, статичні, руху, поосьового, автомобільні
Код посилання
<a href="https://ua.patents.su/5-87873-statichni-avtomobilni-vagi-dlya-poosovogo-zvazhuvannya-pid-chas-rukhu.html" target="_blank" rel="follow" title="База патентів України">Статичні автомобільні ваги для поосьового зважування під час руху</a>
Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху
Номер патенту: 65851
Опубліковано: 15.04.2004
Автори: Браз Давид Леонідович, Альтман Ілля Аронович, Кулик Сергій Федорович
МПК: G01G 19/02, B60P 5/00
Мітки: зважування, автотранспорту, низькопрофільні, ваги, руху, автомобільні, поосьового
Формула / Реферат:
1. Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху (зокрема, автомобілів і автопоїздів), що містять вантажоприймальну платформу, яка спирається на вмонтовані у вагові модулі тензодатчики, елементи під'їзних шляхів для в'їзду й з'їзду з ваг автомобілів і автопоїздів, що примикають до вантажоприймальної платформи, виконані у вигляді горизонтально розташованих жорстких стаціонарних конструкцій (плит), які...
Автомобільні ваги для зважування автотранспорту під час руху

Номер патенту: 33918
Опубліковано: 25.07.2008
Автори: Кулик Сергій Федорович, Браз Давид Леонідович
МПК: G01G 19/02
Мітки: автомобільні, зважування, руху, автотранспорту, ваги
Формула / Реферат:
Автомобільні ваги для зважування автотранспорту під час руху, що містять розміщену у полотні шляху вантажоприймальну платформу, яка спирається на тензодатчики, які вбудовані у вагові модулі, елементи під'їзних шляхів для в'їзду та з'їзду з ваг автомобілів та автопоїздів, які примикають до вантажоприймальної платформи, виконані у вигляді знімних, горизонтально розташованих жорстких стаціонарних конструкцій (плит), які відрізняються тим, що...
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху

Номер патенту: 67937
Опубліковано: 15.07.2004
Автори: Раздобаров Віктор Георгійович, Ситий Володимир Іванович, Чаков Олександр Миколайович, Сацюк Валерій Іванович, Лісовий Віталій Васильович
МПК: B60S 5/00, G01G 19/00
Мітки: транспорту, поосьового, зважування, пристрій, технологічного, руху, вагонів
Формула / Реферат:
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху, що містить вантажоприймальний вузол, який складається з платформи, що опирається на силовимірювальні датчики, підключені до аналого-цифрового перетворювача, вузол визначення напрямку руху, блок процесора з запам'ятовуючими пристроями, з входами якого з'єднані аналого-цифровий перетворювач і вузол визначення напрямку руху, а його вихід через інтерфейс з'єднаний...
Автомобільні ваги
Номер патенту: 29148
Опубліковано: 16.10.2000
Автори: Калінін Олександр Іванович, Дмитрієв Едуард Модестович
МПК: G01G 19/02
Мітки: автомобільні, ваги
Формула / Реферат:
1. Автомобільні ваги, які містять встановлені на силовимірювальні датчики вантажоприймальної платформи, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що вони забезпечені перехідним мостом, розташованим між вантажеприймальними платформами, на які він вільно опирається, при цьому вантажоприймальні платформи забезпечені жорстко закріпленими до них упорами, які встановлені паралельно подовжнім балкам перехідного моста з...
Ваги для зважування транспортних засобів
Номер патенту: 37468
Опубліковано: 15.05.2001
Автори: Фурер Олександр Мойсейович, Браз Давид Леонідович, Альтман Ілля Аронович
МПК: B60S 5/00, G01G 19/00
Мітки: ваги, транспортних, зважування, засобів
Формула / Реферат:
1. Ваги для зважування транспортних засобів, що містять установлену на нерухомій опорі опорну раму вантажоприймальну платформу, датчики для вимірювання сили, що розташовані між опорною рамою і вантажоприймальною платформою, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що опорна рама виконана у вигляді пов'язаних перемичкою блоків коробчастої форми, нижні горизонтальні плити яких обладнані вертикально розташованими...
Попередній патент: Спосіб перероблення важкорозчинної калійно-магнієвої руди
Наступний патент: Датчик температури
Випадковий патент: Спосіб створення сортів редиски посівної