Спосіб визначення довжини фактичного контакту інструмента з зразком при волочінні і роздачі
Номер патенту: 89283
Опубліковано: 10.04.2014
Автори: Турич Валерій Володимирович, Руткевич Володимир Степанович
Формула / Реферат
Спосіб визначення довжини фактичного контакту інструмента зі зразком при волочінні і роздачі, який полягає в протягуванні інструмента через зразок і реєстрації слідів контакту інструмента зі зразком, за якими оцінюють довжину фактичного контакту, який відрізняється тим, що протягують інструмент через зразок і реєструють сліди контакту інструмента зі зразком, по яких оцінюють довжину фактичного контакту, урівень з оброблюваною циліндричною поверхнею зразка розміщують два датчики в діаметральній площині на заданій відстані між ними, а довжину фактичного контакту розраховують за формулою
![]() ,
,
де ![]() і
і ![]() - довжина контакту, фіксованого першим і другим датчиком;
- довжина контакту, фіксованого першим і другим датчиком;
![]() - задана відстань між датчиками;
- задана відстань між датчиками;
![]() - відстань між фронтами двох контактів;
- відстань між фронтами двох контактів;
![]() - розмір контактної поверхні датчиків.
- розмір контактної поверхні датчиків.
Текст
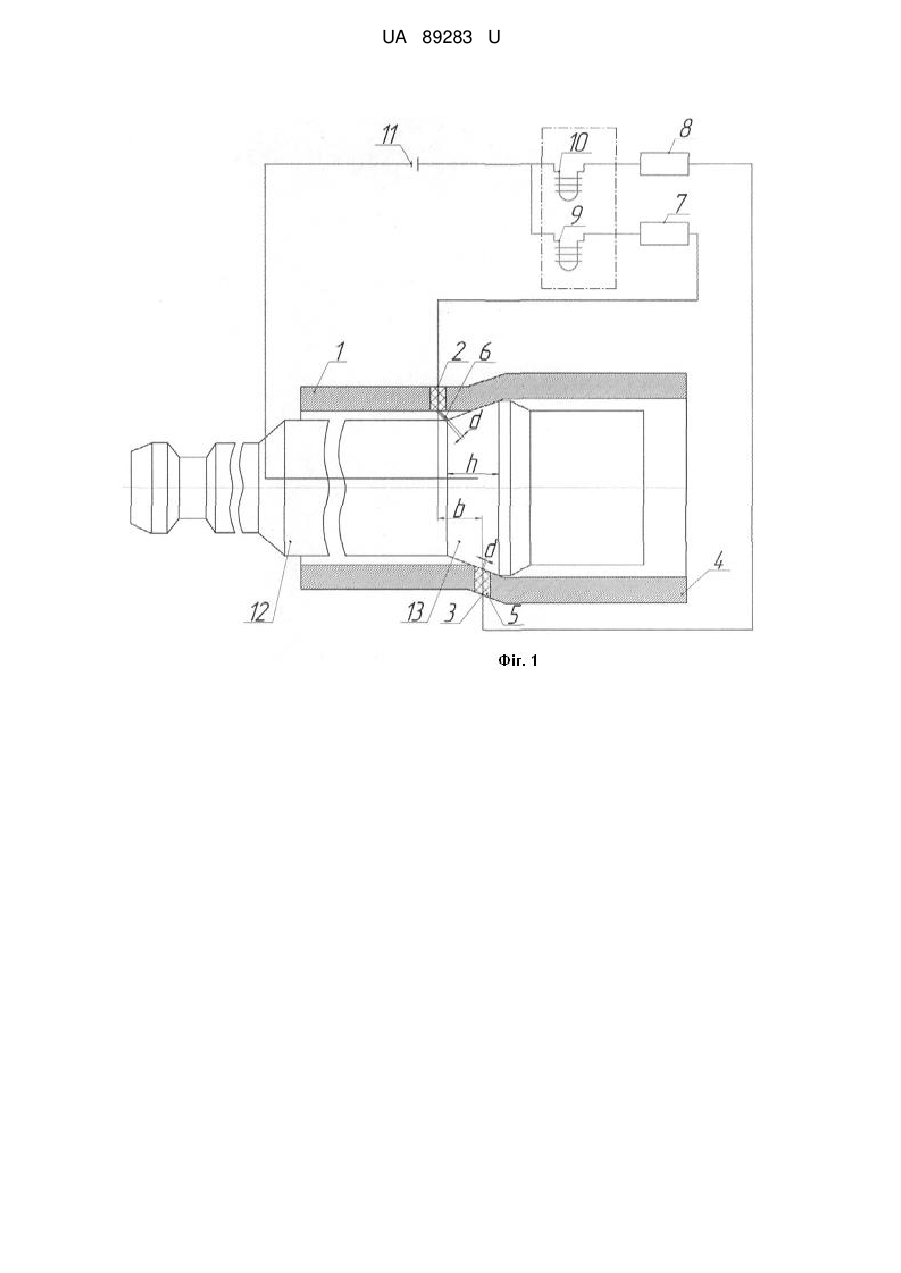
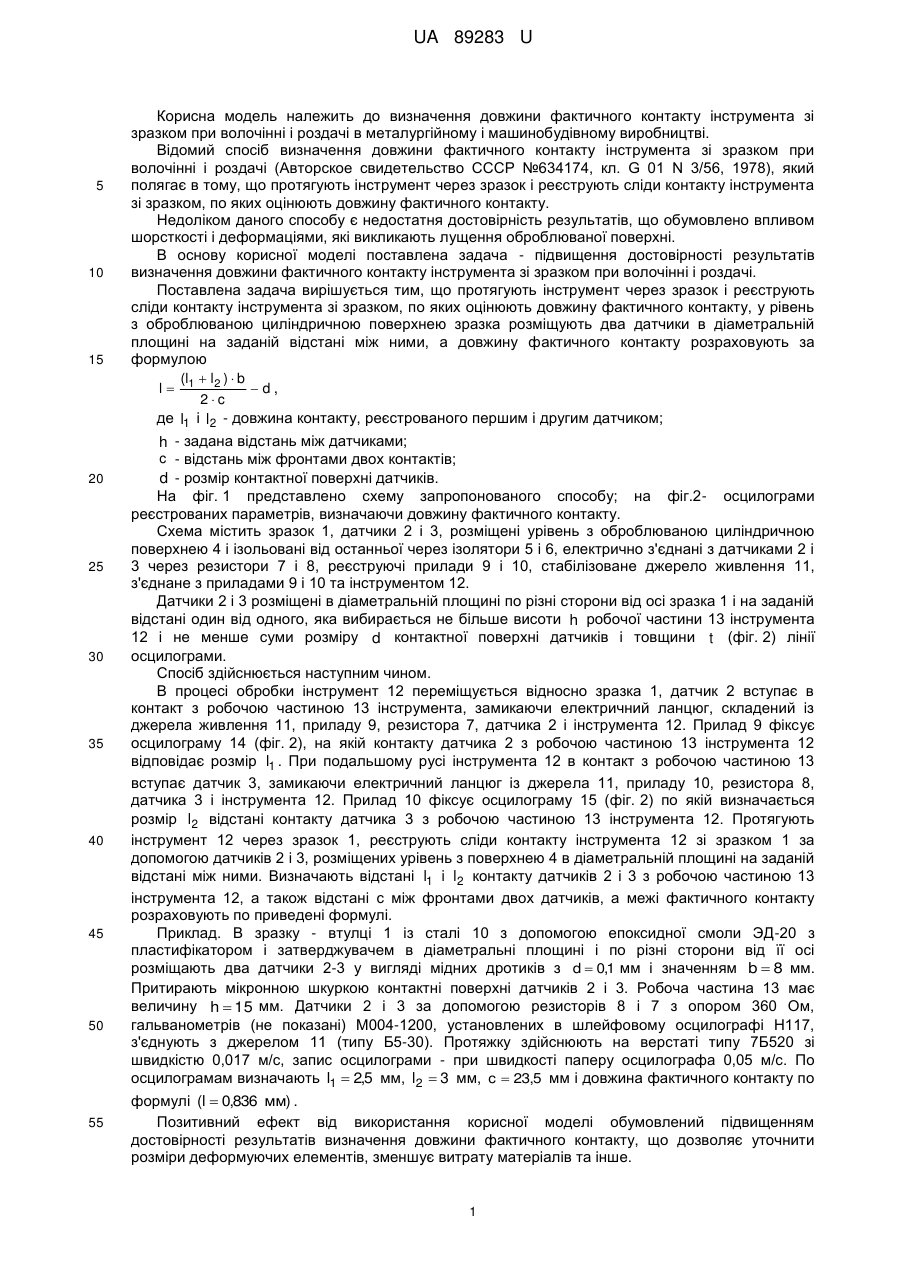
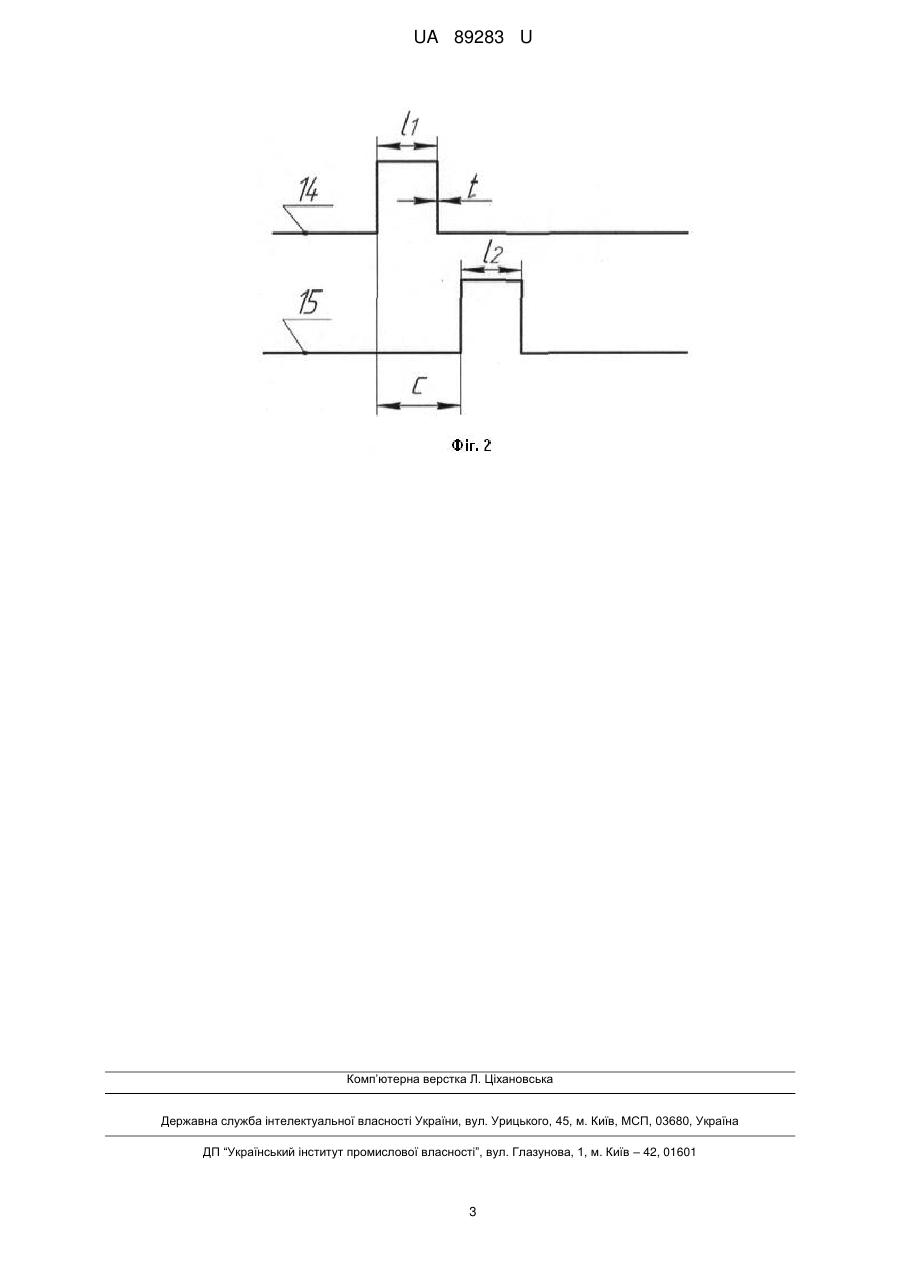
Реферат: UA 89283 U UA 89283 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до визначення довжини фактичного контакту інструмента зі зразком при волочінні і роздачі в металургійному і машинобудівному виробництві. Відомий спосіб визначення довжини фактичного контакту інструмента зі зразком при волочінні і роздачі (Авторское свидетельство СССР №634174, кл. G 01 Ν 3/56, 1978), який полягає в тому, що протягують інструмент через зразок і реєструють сліди контакту інструмента зі зразком, по яких оцінюють довжину фактичного контакту. Недоліком даного способу є недостатня достовірність результатів, що обумовлено впливом шорсткості і деформаціями, які викликають лущення оброблюваної поверхні. В основу корисної моделі поставлена задача - підвищення достовірності результатів визначення довжини фактичного контакту інструмента зі зразком при волочінні і роздачі. Поставлена задача вирішується тим, що протягують інструмент через зразок і реєструють сліди контакту інструмента зі зразком, по яких оцінюють довжину фактичного контакту, у рівень з оброблюваною циліндричною поверхнею зразка розміщують два датчики в діаметральній площині на заданій відстані між ними, а довжину фактичного контакту розраховують за формулою (l l ) b l 1 2 d, 2c де l1 і l2 - довжина контакту, реєстрованого першим і другим датчиком; h - задана відстань між датчиками; c - відстань між фронтами двох контактів; d - розмір контактної поверхні датчиків. На фіг. 1 представлено схему запропонованого способу; на фіг.2- осцилограми реєстрованих параметрів, визначаючи довжину фактичного контакту. Схема містить зразок 1, датчики 2 і 3, розміщені урівень з оброблюваною циліндричною поверхнею 4 і ізольовані від останньої через ізолятори 5 і 6, електрично з'єднані з датчиками 2 і 3 через резистори 7 і 8, реєструючі прилади 9 і 10, стабілізоване джерело живлення 11, з'єднане з приладами 9 і 10 та інструментом 12. Датчики 2 і 3 розміщені в діаметральній площині по різні сторони від осі зразка 1 і на заданій відстані один від одного, яка вибирається не більше висоти h робочої частини 13 інструмента 12 і не менше суми розміру d контактної поверхні датчиків і товщини t (фіг. 2) лінії осцилограми. Спосіб здійснюється наступним чином. В процесі обробки інструмент 12 переміщується відносно зразка 1, датчик 2 вступає в контакт з робочою частиною 13 інструмента, замикаючи електричний ланцюг, складений із джерела живлення 11, приладу 9, резистора 7, датчика 2 і інструмента 12. Прилад 9 фіксує осцилограму 14 (фіг. 2), на якій контакту датчика 2 з робочою частиною 13 інструмента 12 відповідає розмір l1 . При подальшому русі інструмента 12 в контакт з робочою частиною 13 вступає датчик 3, замикаючи електричний ланцюг із джерела 11, приладу 10, резистора 8, датчика 3 і інструмента 12. Прилад 10 фіксує осцилограму 15 (фіг. 2) по якій визначається розмір l2 відстані контакту датчика 3 з робочою частиною 13 інструмента 12. Протягують інструмент 12 через зразок 1, реєструють сліди контакту інструмента 12 зі зразком 1 за допомогою датчиків 2 і 3, розміщених урівень з поверхнею 4 в діаметральній площині на заданій відстані між ними. Визначають відстані l1 i l2 контакту датчиків 2 і 3 з робочою частиною 13 інструмента 12, а також відстані с між фронтами двох датчиків, а межі фактичного контакту розраховують по приведені формулі. Приклад. В зразку - втулці 1 із сталі 10 з допомогою епоксидної смоли ЭД-20 з пластифікатором і затверджувачем в діаметральні площині і по різні сторони від її осі розміщають два датчики 2-3 у вигляді мідних дротиків з d 0,1 мм і значенням b 8 мм. Притирають мікронною шкуркою контактні поверхні датчиків 2 і 3. Робоча частина 13 має величину h 15 мм. Датчики 2 і 3 за допомогою резисторів 8 і 7 з опором 360 Ом, гальванометрів (не показані) М004-1200, установлених в шлейфовому осцилографі H117, з'єднують з джерелом 11 (типу Б5-30). Протяжку здійснюють на верстаті типу 7Б520 зі швидкістю 0,017 м/с, запис осцилограми - при швидкості паперу осцилографа 0,05 м/с. По осцилограмам визначають l1 2,5 мм, l2 3 мм, c 23,5 мм і довжина фактичного контакту по формулі (l 0,836 мм) . Позитивний ефект від використання корисної моделі обумовлений підвищенням достовірності результатів визначення довжини фактичного контакту, що дозволяє уточнити розміри деформуючих елементів, зменшує витрату матеріалів та інше. 1 UA 89283 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб визначення довжини фактичного контакту інструмента зі зразком при волочінні і роздачі, який полягає в протягуванні інструмента через зразок і реєстрації слідів контакту інструмента зі зразком, за якими оцінюють довжину фактичного контакту, який відрізняється тим, що протягують інструмент через зразок і реєструють сліди контакту інструмента зі зразком, по яких оцінюють довжину фактичного контакту, урівень з оброблюваною циліндричною поверхнею зразка розміщують два датчики в діаметральній площині на заданій відстані між ними, а довжину фактичного контакту розраховують за формулою (l l ) b l 1 2 d, 2c д е l1 і l 2 - д о в ж и н а к о н т а к т у , ф і к с о в а н о г о п е р ш и м і д р у г и м д а т ч и к о м ; b - задана відстань між датчиками; c - відстань між фронтами двох контактів; d - розмір контактної поверхні датчиків. 2 UA 89283 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 3/56
Мітки: контакту, інструмента, визначення, волочінні, довжини, зразком, роздачі, спосіб, фактичного
Код посилання
<a href="https://ua.patents.su/5-89283-sposib-viznachennya-dovzhini-faktichnogo-kontaktu-instrumenta-z-zrazkom-pri-volochinni-i-rozdachi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення довжини фактичного контакту інструмента з зразком при волочінні і роздачі</a>
Спосіб визначення довжини контакту стружки з передньою поверхнею різального інструмента
Номер патенту: 16733
Опубліковано: 15.08.2006
Автори: Клюй Ольга Вікторівна, Усачов Петро Антонович
МПК: B23B 1/00
Мітки: різального, визначення, поверхнею, довжини, передньою, спосіб, інструмента, контакту, стружки
Формула / Реферат:
Спосіб визначення довжини контакту стружки з передньою поверхнею різального інструмента, що включає нанесення на передню поверхню різальної частини інструмента контрольного покриття, який відрізняється тим, що на передню поверхню інструмента на заданій відстані від різальної кромки наносять резистивний елемент з опором
Спосіб визначення площадки контакту стружки з передньою поверхнею робочої частини інструмента
Номер патенту: 73718
Опубліковано: 10.10.2012
Автори: Усачов Петро Антонович, Даценко Михайло Андрійович, Паткевич Ольга Іванівна
МПК: G01B 7/32, B23B 1/00, G01B 17/06
Мітки: поверхнею, інструмента, спосіб, частини, площадки, передньою, робочої, контакту, стружки, визначення
Формула / Реферат:
Спосіб визначення площадки контакту стружки з передньою поверхнею робочої частини інструмента, який відрізняється тим, що на опорну площадку робочої частини інструмента наклеюють п'єзокристал, який збуджується генератором високої частоти і перетворює електричні імпульси в ультразвукові, які розповсюджуються у тілі робочої частини інструмента перпендикулярно його опорній поверхні, відбиваються від передньої поверхні, повертаються до...
Пристрій для визначення робочої довжини зуба та інструмента, який застосовують при ендодонтичному лікуванні та для замішування пломбувальної суміші
Номер патенту: 54874
Опубліковано: 17.03.2003
Автори: Шевельов Володимир Семенович, Онопрієнко Юрій Михайлович
МПК: A61C 19/04
Мітки: замішування, суміші, визначення, застосовують, ендодонтичному, довжини, зуба, лікуванні, пристрій, робочої, пломбувальної, інструмента
Формула / Реферат:
Пристрій для визначення робочої довжини зуба та інструмента, який застосовують при ендодонтичному лікуванні та для замішування пломбувальної суміші, що містить корпус з освітлювальним елементом всередині і скляний матовий екран, який відрізняється тим, що корпус має циліндричну форму, верхня та нижня поверхні якого окантовані гумовим бортиком, причому верхня поверхня є екраном, на якому зафіксовані дві паралельні рейки, на яких в пазах рухомо...
Спосіб визначення показника фактичного режиму роботи пропульсивного комплексу судна
Номер патенту: 84623
Опубліковано: 10.11.2008
Автори: Корнієць Олег Євгенович, Корнієць Євген Павлович, Корнієць Тетяна Євгенівна
МПК: B63H 25/00, G01M 15/05, B63B 9/08
Мітки: судна, комплексу, фактичного, пропульсивного, роботи, спосіб, режиму, показника, визначення
Формула / Реферат:
Спосіб визначення показника фактичного режиму роботи пропульсивного комплексу судна, який полягає в тому, що по формулі підраховують поточне значення показника фактичного режиму роботи пропульсивного комплексу судна, який відрізняється тим, що замірюють поточне значення погодинної витрати рідкого палива та частоти обертання вала дизеля й по відомих значеннях погодинної витрати палива і середнього ефективного тиску газів в точці номінального...
Спосіб визначення фактичного вмісту поживних речовин в травному тракті жуйних
Номер патенту: 55104
Опубліковано: 17.03.2003
Автори: Столярчук Панас Зенонович, Півторак Ярослав Іванович
МПК: G01N 33/50
Мітки: речовин, фактичного, спосіб, визначення, травному, поживних, жуйних, тракті, вмісту
Формула / Реферат:
1. Спосіб визначення фактичного вмісту поживних речовин в травному тракті жуйних, що включає хімічний аналіз проб вмісту окремих відділів травного тракту, який відрізняється тим, що аналізують вміст поживних речовин в усіх відділах травного тракту жуйних одночасно, при цьому результати аналізу корегують з використанням поправного коефіцієнта (ПК), який визначають як відношення наявних у вмісті кожного досліджуваного відділу травного тракту...
Попередній патент: Спосіб оцінки потенційної оцінки стійкості сосни звичайної до фітопатогенного ураження
Наступний патент: Спосіб обробки отворів деталей пластичним деформуванням
Випадковий патент: Спосіб виготовлення кремнієвих меза-діодів