Маніпулятор для підйому, транспортування і встановлення в корпус деталей типу втулок при термічному складанні з’єднань з натягом
Номер патенту: 94655
Опубліковано: 25.11.2014
Автори: Іванов Геннадій Олександрович, Мартинов Анатолій Павлович, Ткаченко Олександр Володимирович, Горбенко Олена Андріївна
Формула / Реферат
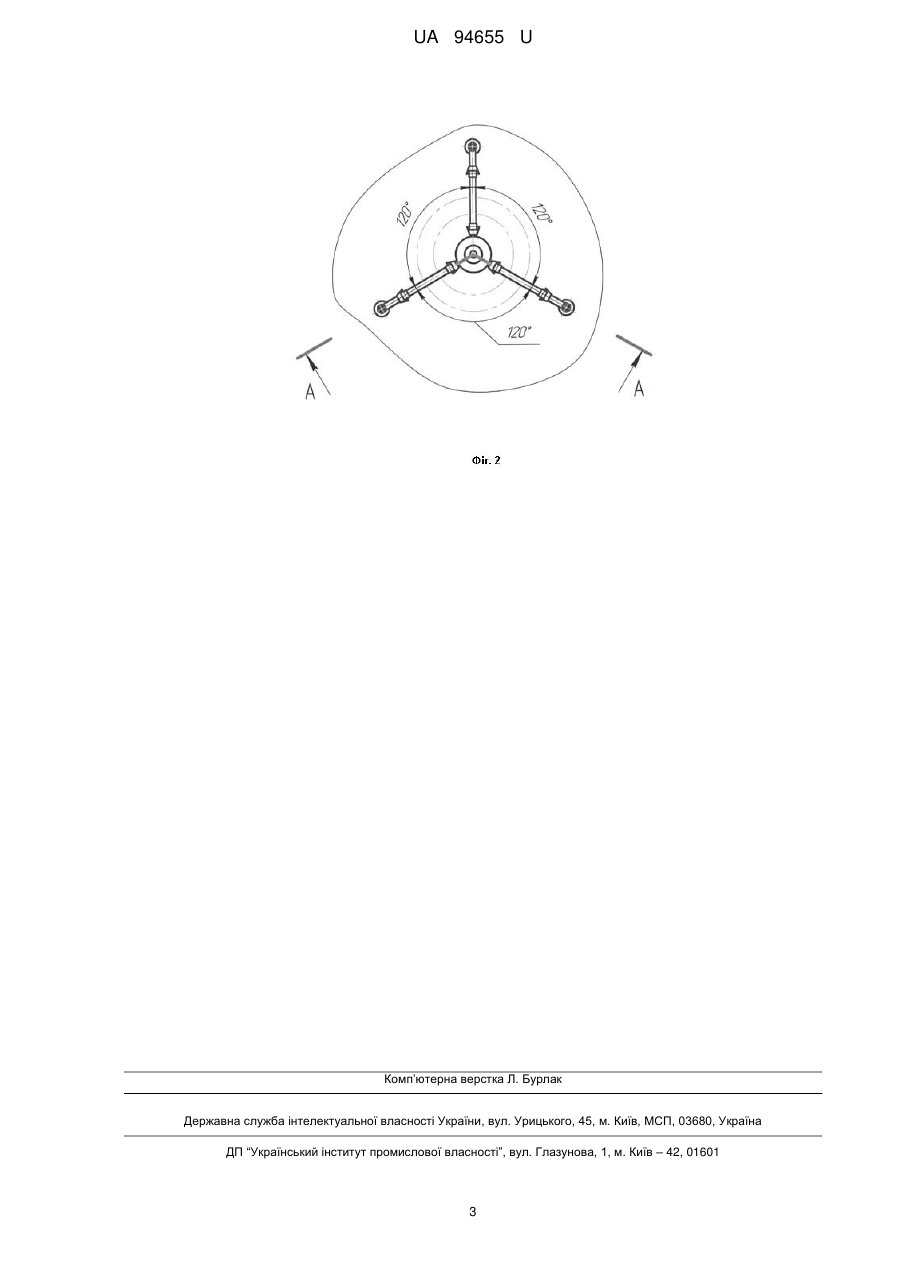
Маніпулятор для підйому, транспортування і встановлення в корпус деталей типу втулок при термічному складанні з'єднань з натягом, що містить передавальний механізм, виконавчий механізм з ведучою і вихідними ланками, останні з яких забезпечені губками для захоплення виробів і шарнірно зв'язані з вихідною ланкою передавального механізму, та рушій, який відрізняється тим, що передавальний механізм виконаний у вигляді розміщених під кутом 120 ° у плані трьох корбово-гонкових механізмів, котрі мають загальну центральну ланку у вигляді втулки-повзуна з можливістю її осьового переміщення по стояку та упори, положення яких регулюється, наприклад, за рахунок різьбового з'єднання, а рушій виконаний у вигляді встановленого на стояку тягаря.
Текст
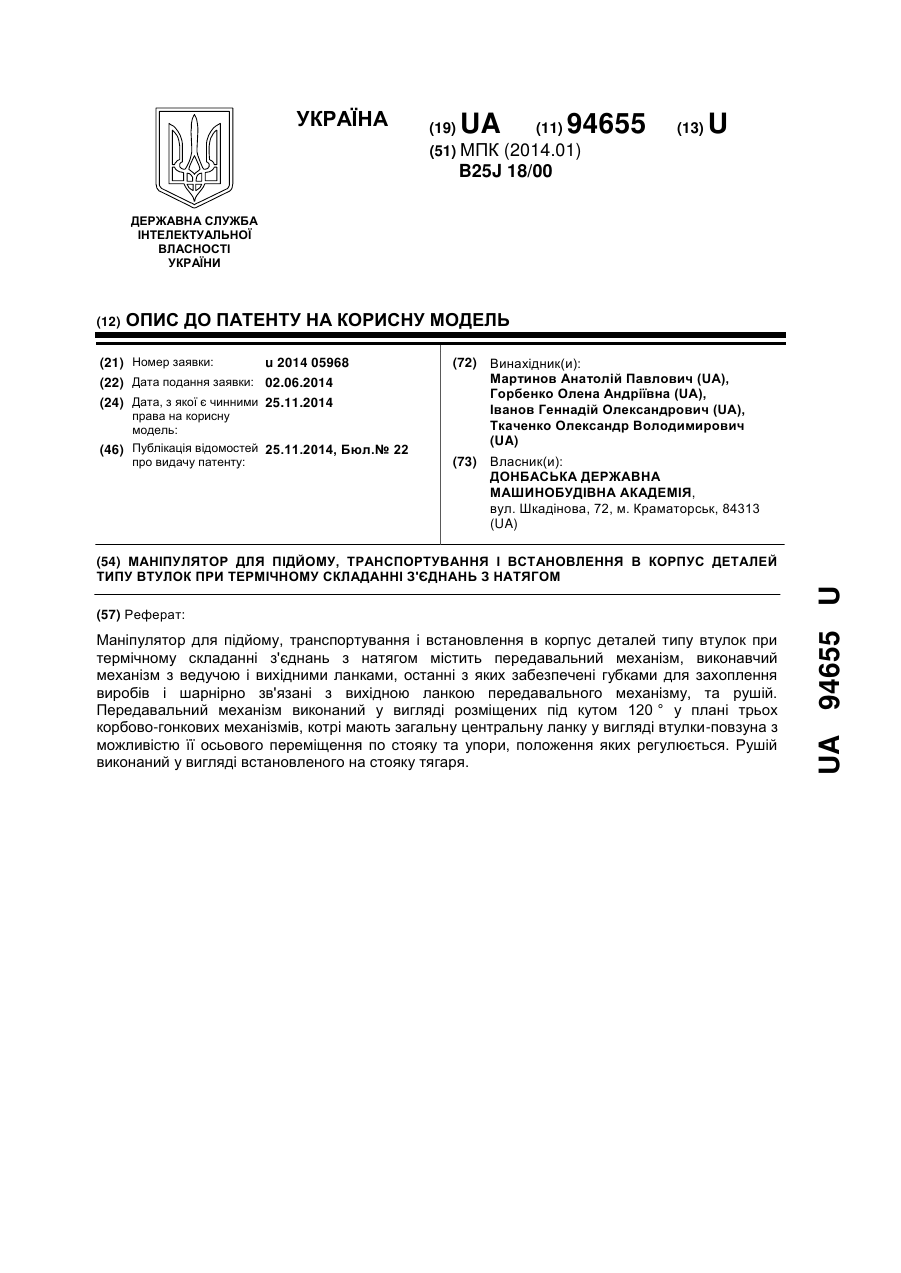
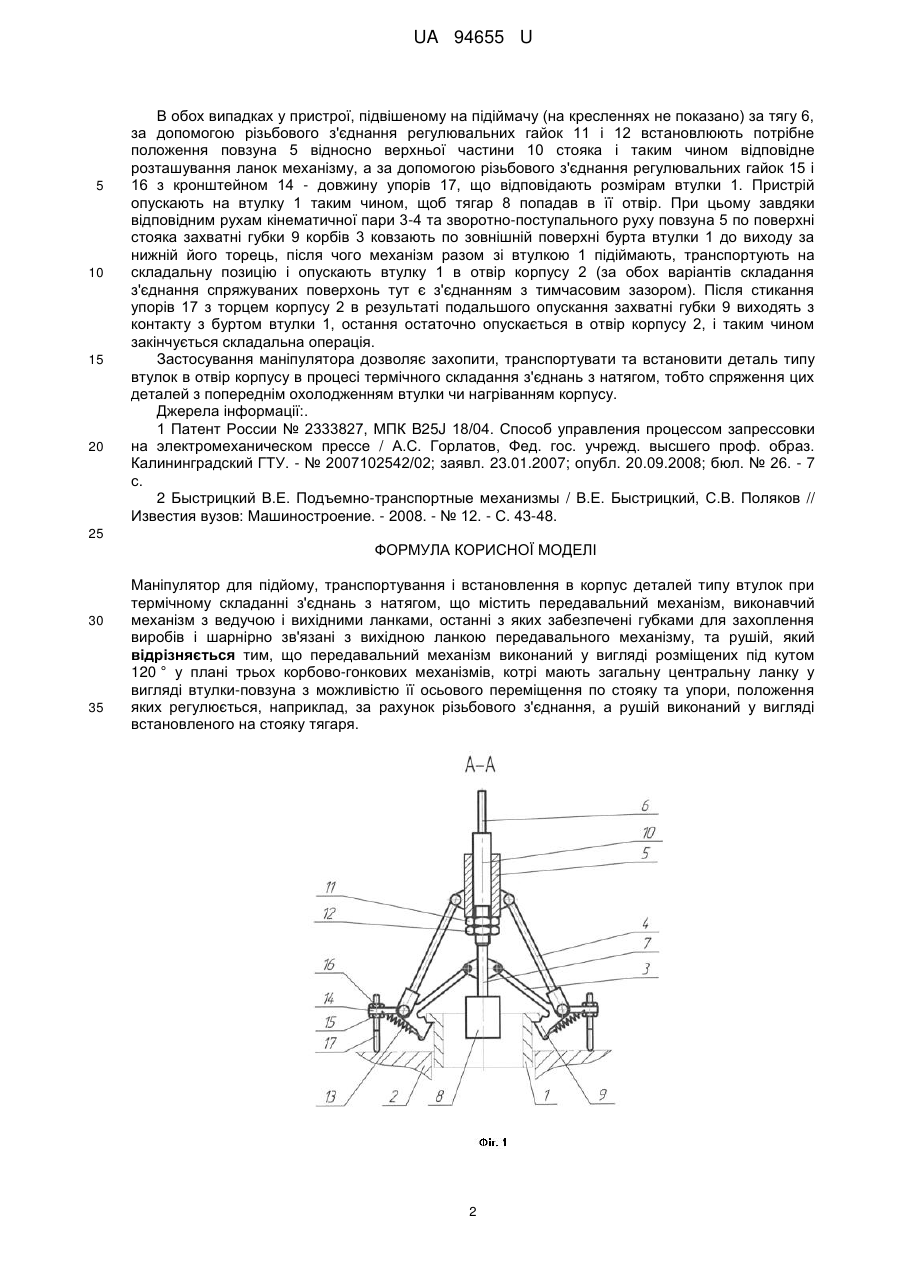
Реферат: Маніпулятор для підйому, транспортування і встановлення в корпус деталей типу втулок при термічному складанні з'єднань з натягом містить передавальний механізм, виконавчий механізм з ведучою і вихідними ланками, останні з яких забезпечені губками для захоплення виробів і шарнірно зв'язані з вихідною ланкою передавального механізму, та рушій. Передавальний механізм виконаний у вигляді розміщених під кутом 120 ° у плані трьох корбово-гонкових механізмів, котрі мають загальну центральну ланку у вигляді втулки-повзуна з можливістю її осьового переміщення по стояку та упори, положення яких регулюється. Рушій виконаний у вигляді встановленого на стояку тягаря. UA 94655 U (54) МАНІПУЛЯТОР ДЛЯ ПІДЙОМУ, ТРАНСПОРТУВАННЯ І ВСТАНОВЛЕННЯ В КОРПУС ДЕТАЛЕЙ ТИПУ ВТУЛОК ПРИ ТЕРМІЧНОМУ СКЛАДАННІ З'ЄДНАНЬ З НАТЯГОМ UA 94655 U UA 94655 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, де застосовуються пристрої для виконання допоміжних операцій при обслуговуванні машин, верстатів, пресів та засобів різного призначення і може бути використана для підйому, транспортування і встановлення деталей, переважно типу втулок, в корпусні деталі при проведенні технологічної операції термічного складання з'єднань спряжуваних деталей (тобто, з попереднім нагріванням охоплюючої або охолодженням охоплюваної деталей). Відомий маніпулятор для передавання виробів, що встановлюються, як правило, в лініях автоматичного складання, в якому передавальний механізм виконаний у вигляді багатоланкового шарнірно-важільного механізму, який вміщує базовий корбово-коромисловий механізм і кінематично зв'язану з коромислом базового механізму вихідну ланку у вигляді штовхача, що є ведучою ланкою виконавчого механізму [1]. Найбільш близьким аналогом пропонованого пристрою, вибраного як прототип, є маніпулятор, в якому передавальний та виконавчий механізми з ведучою і вихідними ланками виконані у вигляді багатоланкової важільної системи, що має раму, на осях консолей якої розміщені захватні важелі, які за допомогою кінематично зв'язаної з останніми системи важелів розкриваються чи закриваються за командою електронних датчиків під дією поршня силового циліндра [2]. Загальними суттєвими ознаками відомого маніпулятора і того, що заявляється, є наявність передавального механізму, виконавчого механізму з ведучою і вихідними ланками, останні з яких забезпечені губками для захоплення виробів і шарнірно зв'язані з вихідною ланкою передавального механізму, та рушій. Недоліком відомого пристрою є відносна складність багатоланкової важільної системи, зокрема, через наявність силового циліндра та електронних датчиків. До того ж указаний механізм може бути використаний лише для плоских деталей, причому без можливості встановлення їх в отвір спряженої деталі (корпусу) - для цього потрібен додатковий досилач. Такий механізм не може бути використаний для встановлення деталей типу втулок в корпусні деталі при термічному складанні з'єднань з натягом. В основу корисної моделі поставлена задача вдосконалення пристрою для створення можливості захвату та встановлення деталей типу втулок в отвір корпусу в процесі термічного складання з'єднань з натягом, тобто спряження цих деталей з попереднім охолодженням втулки чи нагріванням корпусу. Поставлена задача вирішується за рахунок того, що в пристрої, який містить передавальний механізм, виконавчий механізм з ведучою і вихідними ланками, останні з яких забезпечені губками для захоплення виробів і шарнірно зв'язані з вихідною ланкою передавального механізму, та рушій, передавальний механізм виконаний у вигляді розміщених під кутом 120° у плані трьох корбово-гонкових механізмів, котрі мають загальну центральну ланку у вигляді втулки-повзуна з можливістю регулювання його осьового переміщення по стояку та упори, положення яких регулюється за рахунок різьбового з'єднання, а рушій виконаний у вигляді встановленого на стояку тягаря. Суть запропонованої корисної моделі пояснюється кресленнями, на яких зображено: на фіг. 1 - схема встановлення втулки в отвір корпусу при термічному складанні з'єднання, розріз А-А на фіг. 2; на фіг. 2 - вигляд зверху на фіг. 1. Маніпулятор являє собою багатоланкову важільну систему у вигляді трьох розміщених під кутом 120° у плані корбово-гонкових механізмів, що мають корби 3, гонки 4 та загальний для всіх трьох механізмів повзун 5. Загальний стояк важільної системи, який підвішується за тягу 6 на підіймачі (на кресленнях не показано), складається зі згвинчених одна в одну нижньої частини 7 з тягарем 8, на якій розміщені корби 3 з захватними губками 9, та верхньої частини 10, на зовнішній поверхні якої може виконувати зворотно-поступальний рух повзун 5 до упору в крайньому нижньому положенні в регулюючі гайки 11 і 12. Кінематична пара 3-4 має встановлений на загальній осі з'єднаний пружиною 13 з захватними губками 9 корбів 3 кронштейн 14, в якому гайками 15 і 16 закріплені упори-шпильки 17. Пристрій працює наступним чином. Втулка 1, яку встановлюють у корпус 2, перед складанням з попереднім нагріванням охоплюючої деталі, тобто корпусу 2, знаходиться на стендовій плиті (на кресленнях не показано), а при складанні з попереднім охолодженням охоплюваної деталі, тобто самої втулки 1, - в охолоджувальному середовищі чи (після закінчення операції її охолодження) - також на стендовій плиті (вісь втулки 1 при цьому знаходиться у вертикальному положенні, а її бурт - у верхньому положенні, як показано на фіг. 1). 1 UA 94655 U 5 10 15 20 В обох випадках у пристрої, підвішеному на підіймачу (на кресленнях не показано) за тягу 6, за допомогою різьбового з'єднання регулювальних гайок 11 і 12 встановлюють потрібне положення повзуна 5 відносно верхньої частини 10 стояка і таким чином відповідне розташування ланок механізму, а за допомогою різьбового з'єднання регулювальних гайок 15 і 16 з кронштейном 14 - довжину упорів 17, що відповідають розмірам втулки 1. Пристрій опускають на втулку 1 таким чином, щоб тягар 8 попадав в її отвір. При цьому завдяки відповідним рухам кінематичної пари 3-4 та зворотно-поступального руху повзуна 5 по поверхні стояка захватні губки 9 корбів 3 ковзають по зовнішній поверхні бурта втулки 1 до виходу за нижній його торець, після чого механізм разом зі втулкою 1 підіймають, транспортують на складальну позицію і опускають втулку 1 в отвір корпусу 2 (за обох варіантів складання з'єднання спряжуваних поверхонь тут є з'єднанням з тимчасовим зазором). Після стикання упорів 17 з торцем корпусу 2 в результаті подальшого опускання захватні губки 9 виходять з контакту з буртом втулки 1, остання остаточно опускається в отвір корпусу 2, і таким чином закінчується складальна операція. Застосування маніпулятора дозволяє захопити, транспортувати та встановити деталь типу втулок в отвір корпусу в процесі термічного складання з'єднань з натягом, тобто спряження цих деталей з попереднім охолодженням втулки чи нагріванням корпусу. Джерела інформації:. 1 Патент России № 2333827, МПК B25J 18/04. Способ управления процессом запрессовки на электромеханическом прессе / А.С. Горлатов, Фед. гос. учрежд. высшего проф. образ. Калининградский ГТУ. - № 2007102542/02; заявл. 23.01.2007; опубл. 20.09.2008; бюл. № 26. - 7 с. 2 Быстрицкий В.Е. Подъемно-транспортные механизмы / В.Е. Быстрицкий, С.В. Поляков // Известия вузов: Машиностроение. - 2008. - № 12. - С. 43-48. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Маніпулятор для підйому, транспортування і встановлення в корпус деталей типу втулок при термічному складанні з'єднань з натягом, що містить передавальний механізм, виконавчий механізм з ведучою і вихідними ланками, останні з яких забезпечені губками для захоплення виробів і шарнірно зв'язані з вихідною ланкою передавального механізму, та рушій, який відрізняється тим, що передавальний механізм виконаний у вигляді розміщених під кутом 120 ° у плані трьох корбово-гонкових механізмів, котрі мають загальну центральну ланку у вигляді втулки-повзуна з можливістю її осьового переміщення по стояку та упори, положення яких регулюється, наприклад, за рахунок різьбового з'єднання, а рушій виконаний у вигляді встановленого на стояку тягаря. 2 UA 94655 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMartynov Anatolii Pavlovych, Horbenko Olena Andriivna, Ivanov Hennadii Oleksandrovych
Автори російськоюМартынов Анатолий Павлович, Горбенко Елена Андреевна, Иванов Геннадий Александрович
МПК / Мітки
МПК: B25J 18/00
Мітки: маніпулятор, встановлення, підйому, транспортування, з'єднань, натягом, типу, деталей, втулок, корпус, термічному, складанні
Код посилання
<a href="https://ua.patents.su/5-94655-manipulyator-dlya-pidjjomu-transportuvannya-i-vstanovlennya-v-korpus-detalejj-tipu-vtulok-pri-termichnomu-skladanni-zehdnan-z-natyagom.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для підйому, транспортування і встановлення в корпус деталей типу втулок при термічному складанні з’єднань з натягом</a>
Спосіб виготовлення деталей типу втулок
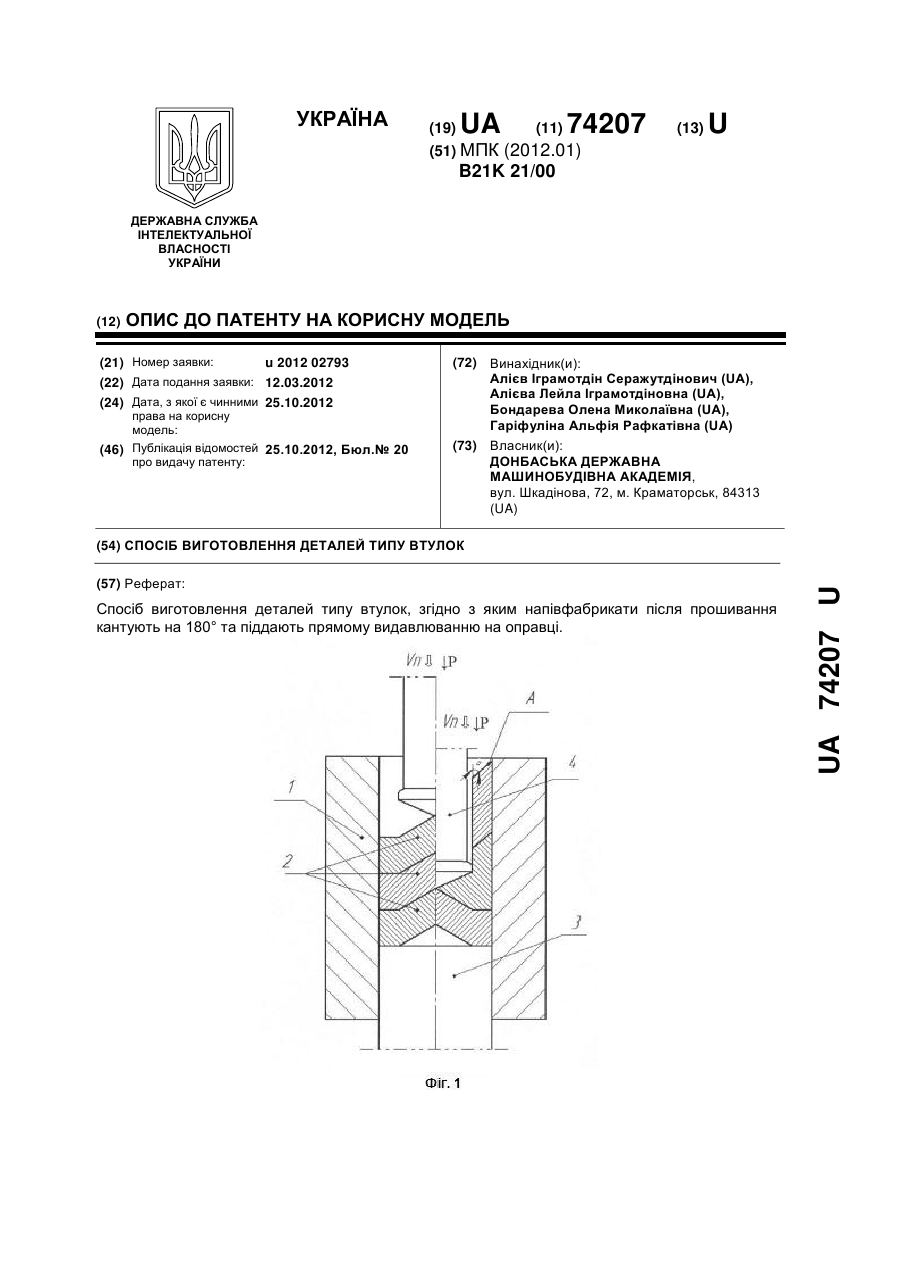
Номер патенту: 74207
Опубліковано: 25.10.2012
Автори: Бондарева Олена Миколаївна, Алієва Лейла Іграмотдіновна, Гаріфуліна Альфія Рафкатівна, Алієв Іграмотдін Серажутдінович
МПК: B21K 21/00
Мітки: спосіб, виготовлення, типу, деталей, втулок
Формула / Реферат:
Спосіб виготовлення деталей типу втулок, який полягає у розміщенні в матриці пакету заготівок і прошиванні передньої наскрізь конічним пуансоном, який відрізняється тим, що напівфабрикати після прошивання кантують на 180° та піддають прямому видавлюванню на оправці.
Спосіб кування деталей типу втулок із розтрубами
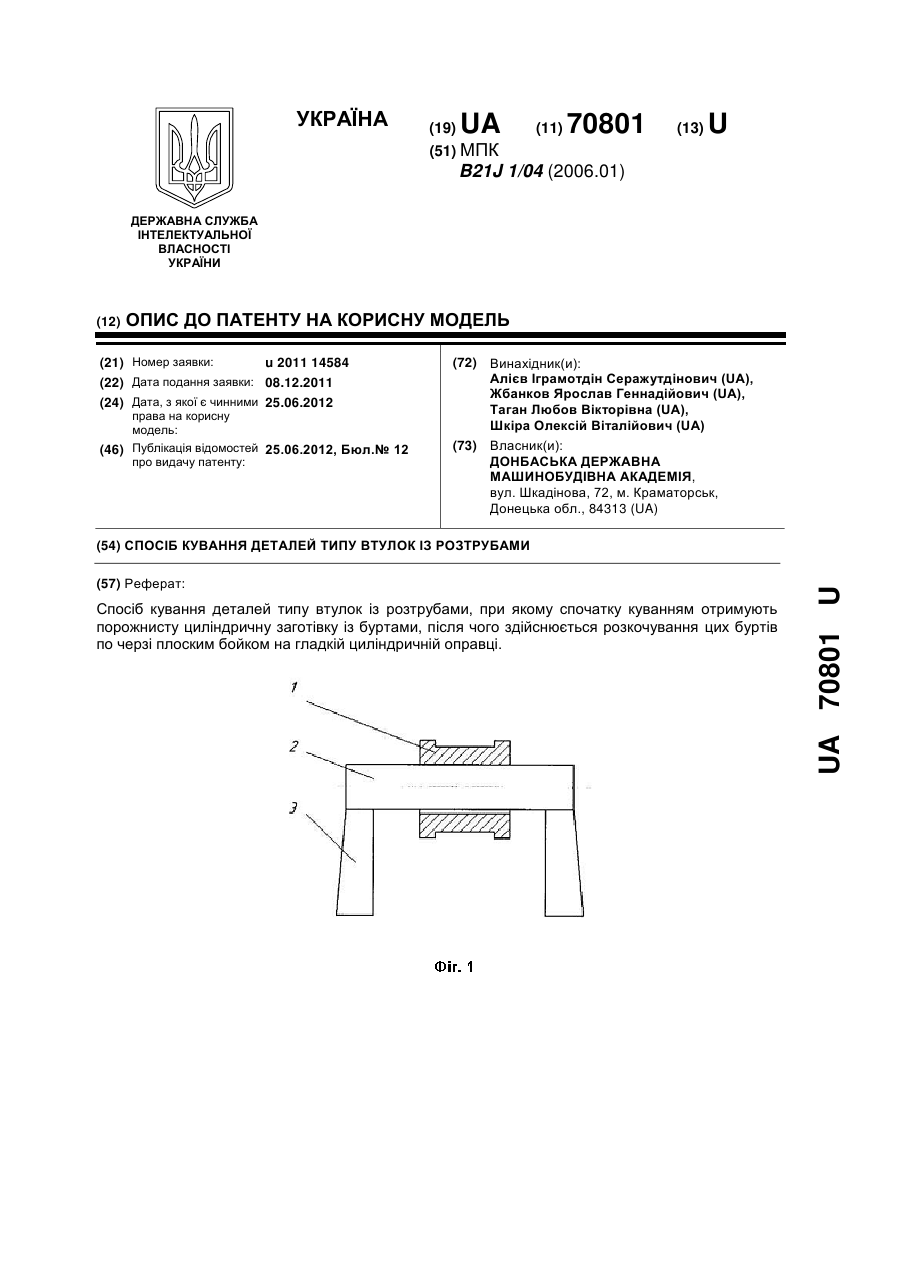
Номер патенту: 70801
Опубліковано: 25.06.2012
Автори: Таган Любов Вікторівна, Шкіра Олексій Віталійович, Жбанков Ярослав Геннадійович, Алієв Іграмотдін Серажутдінович
МПК: B21J 1/04
Мітки: типу, кування, спосіб, деталей, розтрубами, втулок
Формула / Реферат:
Спосіб кування деталей типу втулок із розтрубами, який полягає у виготовленні порожнистої заготівки розкочуванням на циліндричній оправці, який відрізняється тим, що спочатку куванням отримують порожнисту циліндричну заготівку із буртами, після чого здійснюється розкочування цих буртів по черзі плоским бойком на гладкій циліндричній оправці.
Спосіб виготовлення деталей типу втулок з фланцем
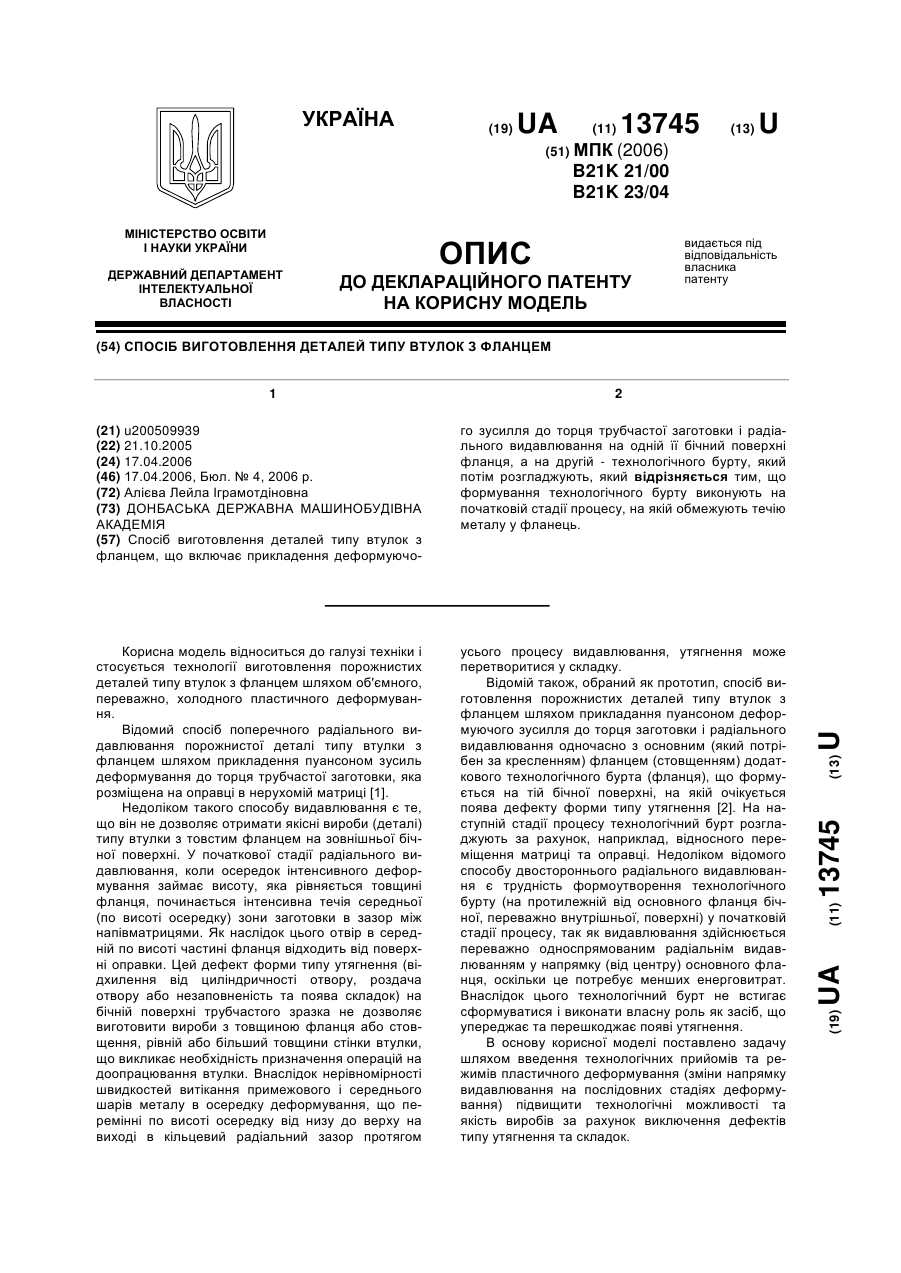
Номер патенту: 13745
Опубліковано: 17.04.2006
Автор: Алієва Лейла Іграмотдіновна
МПК: B21K 23/00, B21K 21/00
Мітки: виготовлення, втулок, типу, фланцем, деталей, спосіб
Формула / Реферат:
Спосіб виготовлення деталей типу втулок з фланцем, що включає прикладення деформуючого зусилля до торця трубчастої заготовки і радіального видавлювання на одній її бічний поверхні фланця, а на другій - технологічного бурту, який потім розгладжують, який відрізняється тим, що формування технологічного бурту виконують на початковій стадії процесу, на якій обмежують течію металу у фланець.
Пристрій для збирання з’єднань з натягом тепловим способом деталей із різнорідних матеріалів
Номер патенту: 93271
Опубліковано: 25.09.2014
Автори: Гордєєв Андрій Сергійович, Святуха Анатолій Якимович
МПК: B23P 19/02
Мітки: тепловим, натягом, різнорідних, з'єднань, деталей, пристрій, способом, матеріалів, збирання
Формула / Реферат:
Пристрій для збирання з'єднань з натягом тепловим способом деталей із різнорідних матеріалів, що містить співвісно розташований запресовочний шток силового циліндра та механізм центрування деталей, які з'єднують, який відрізняється тим, що містить розпилювач охолоджуючої рідини, який змонтований на запресовочному штоці і виконаний у вигляді встановленого в отворі, виконаному в штоці і зв'язаному з гідромагістраллю підпружиненого золотника зі...
Спосіб з’єднання деталей з натягом
Номер патенту: 33013
Опубліковано: 10.06.2008
Автори: Павленко Володимир Миколайович, Петко Ігор Валентинович
МПК: B23P 11/02
Мітки: з'єднання, деталей, натягом, спосіб
Формула / Реферат:
Спосіб з'єднання деталей з натягом, при якому встановлюють тонкостінну втулку в отвір охоплюючої деталі з натягом, який відрізняється тим, що попередньо в отвір тонкостінної втулки встановлюють деформуючу протяжку з наступним її протягуванням для отримання натягу між тонкостінною втулкою та охоплюючою деталлю.
Попередній патент: Спосіб підготовки проб жирів і олій для визначення плюмбуму та кадмію
Наступний патент: Спосіб створення станин ковальських гідравлічних пресів чотириколонної конструкції
Випадковий патент: Безглинистий крохмально-калієвий буровий розчин