Спосіб вібропереміщення сипких харчових мас
Номер патенту: 96293
Опубліковано: 25.10.2011
Автори: Коваленко Артем Володимирович, Фалько Олександр Леонідович

Формула / Реферат
Спосіб вібропереміщення сипких харчових мас під дією механічних коливань шляхом переміщення сипких мас по робочій поверхні, який відрізняється тим, що здійснюють механічні коливання у горизонтальній площині за допомогою робочого органу, який складений з похило встановлених у прямокутному жолобі пластин прямокутної форми, які встановлені одна за одною під кутом до горизонту і жорстко зв'язані між собою по довжині за допомогою вертикально встановлених у жолобі прямокутних пластин-перемичок, при цьому частки продукту, що знаходяться між вертикальною перемичкою і нахиленою пластиною, спочатку рухають разом з робочим органом, далі при русі робочого органу в напрямку кута між похилою пластиною і горизонтом частки продукту переміщують ковзанням по нахиленій пластині робочого органу уверх, а після зміни напрямку руху робочого органу, під дією сили інерції забезпечують відрив часток продукту від верхньої частини похилої поверхні і їх переліт через наступну похилу поверхню згідно з напрямком останнього коливного руху робочого органу, причому процес повторюють кожні два повних цикли коливань.
Текст
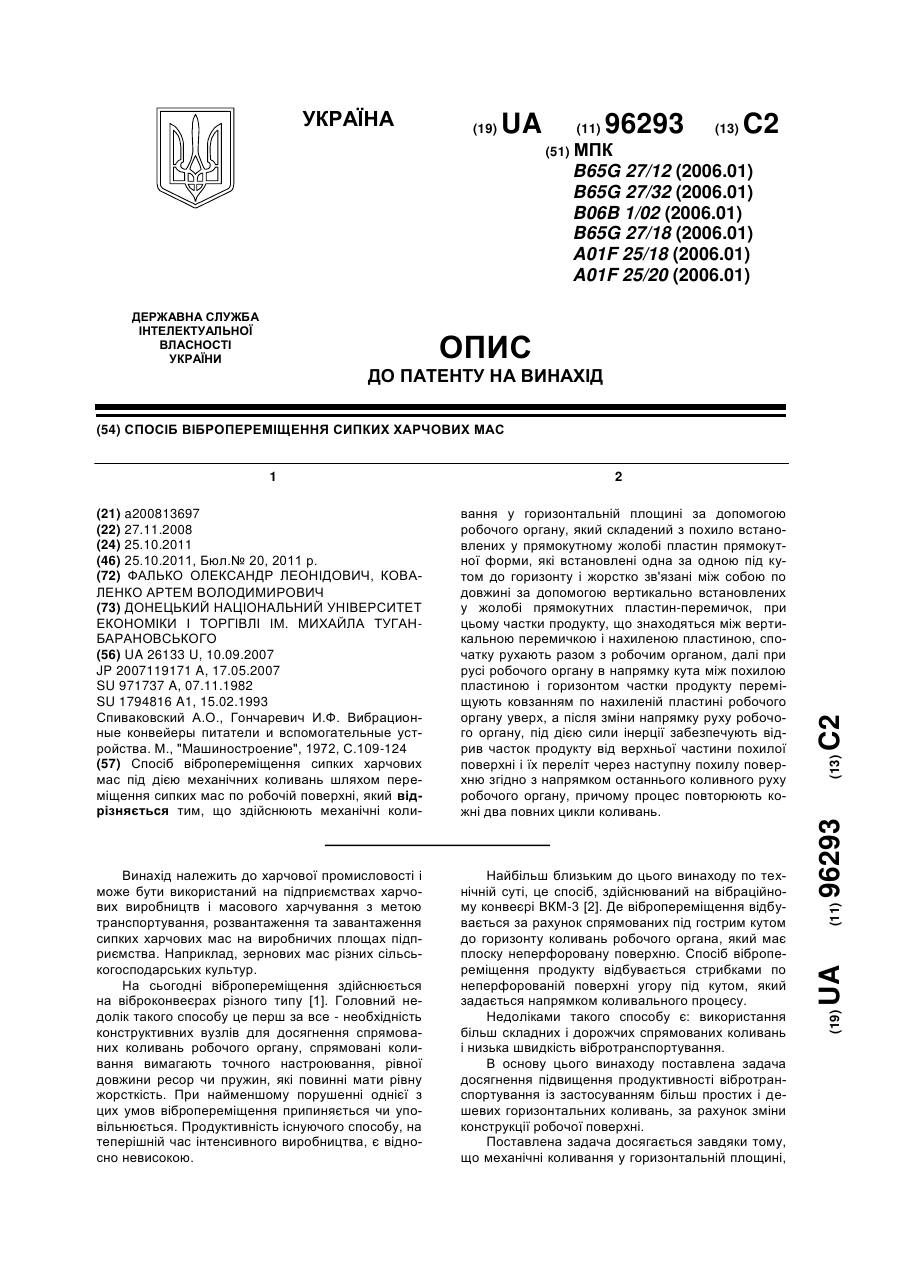
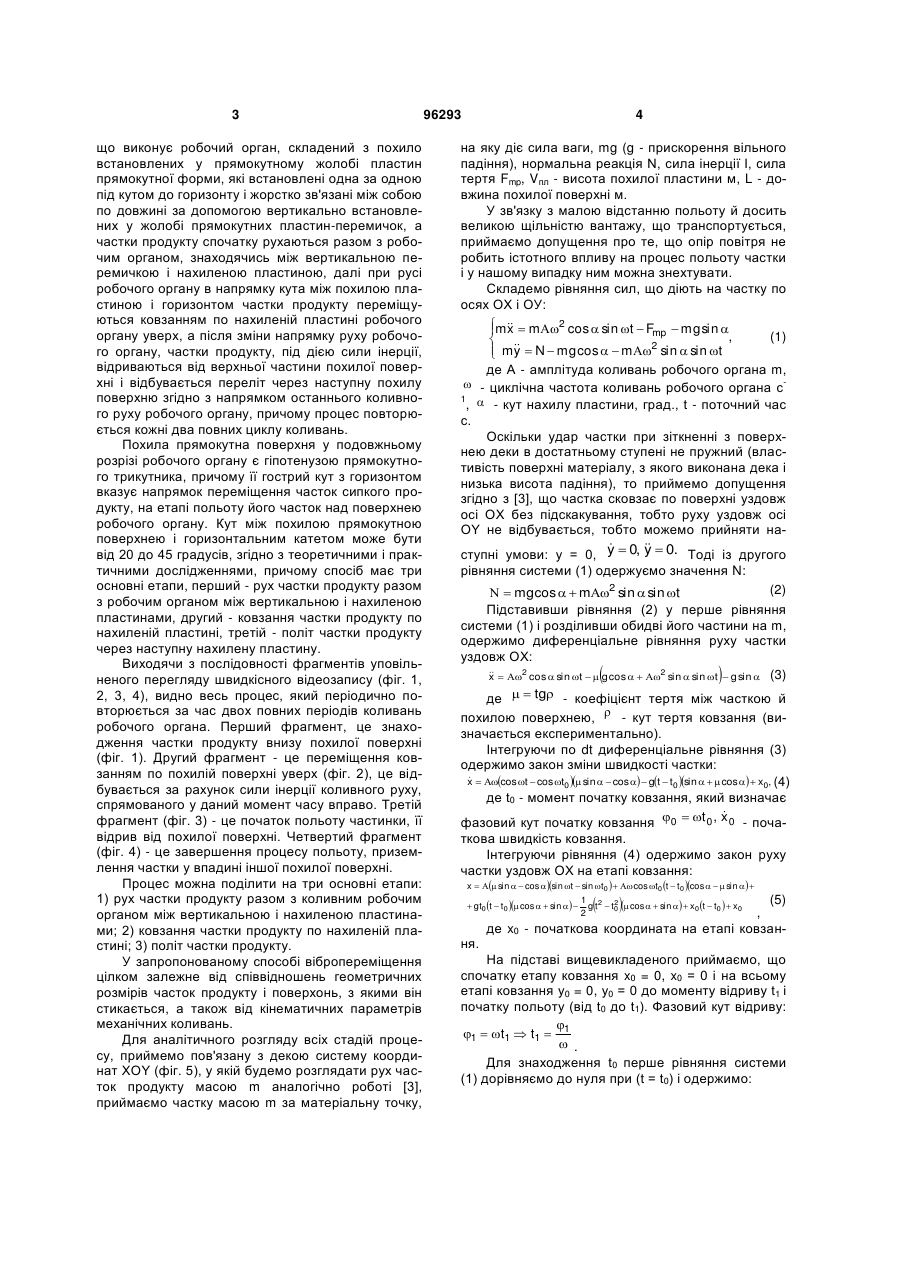
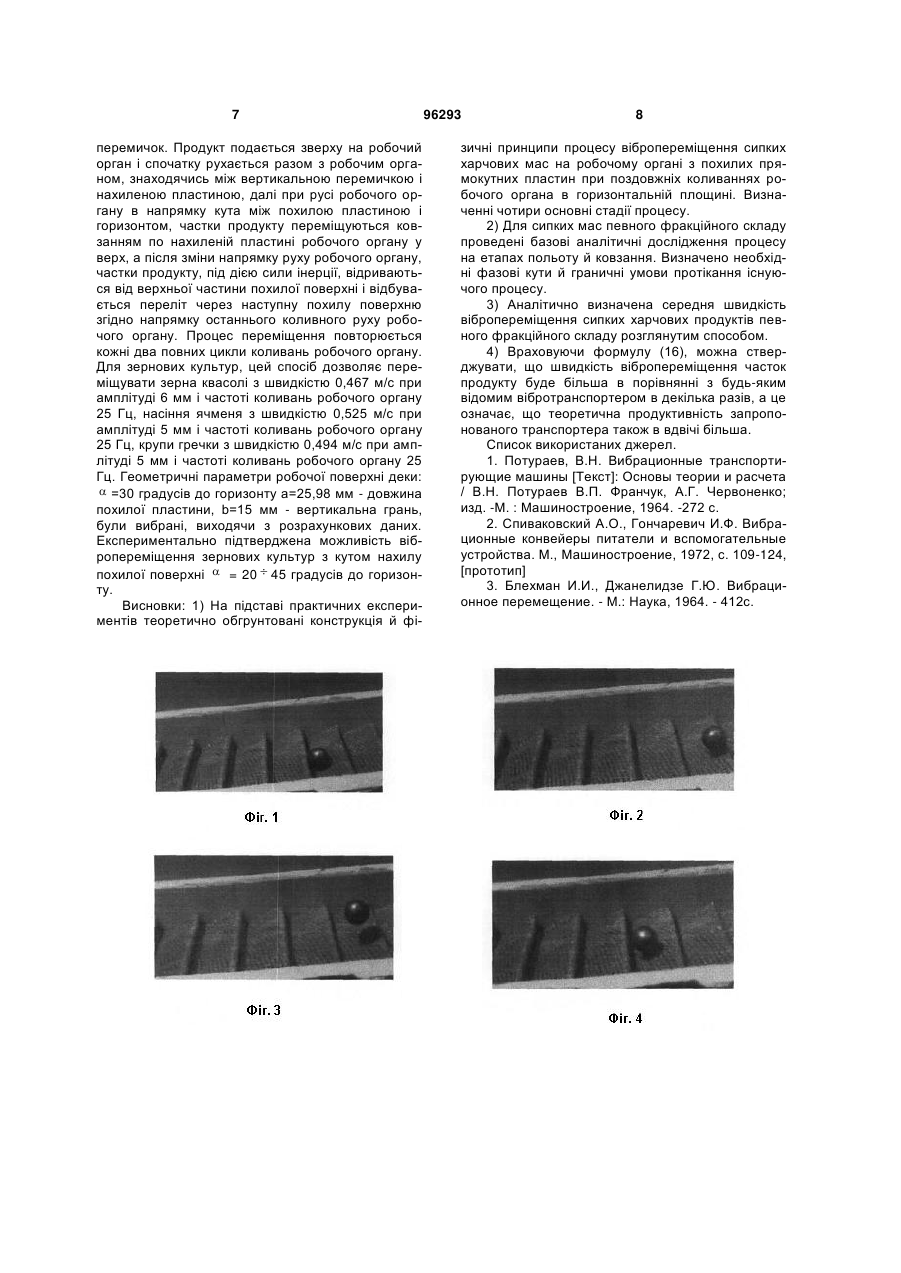
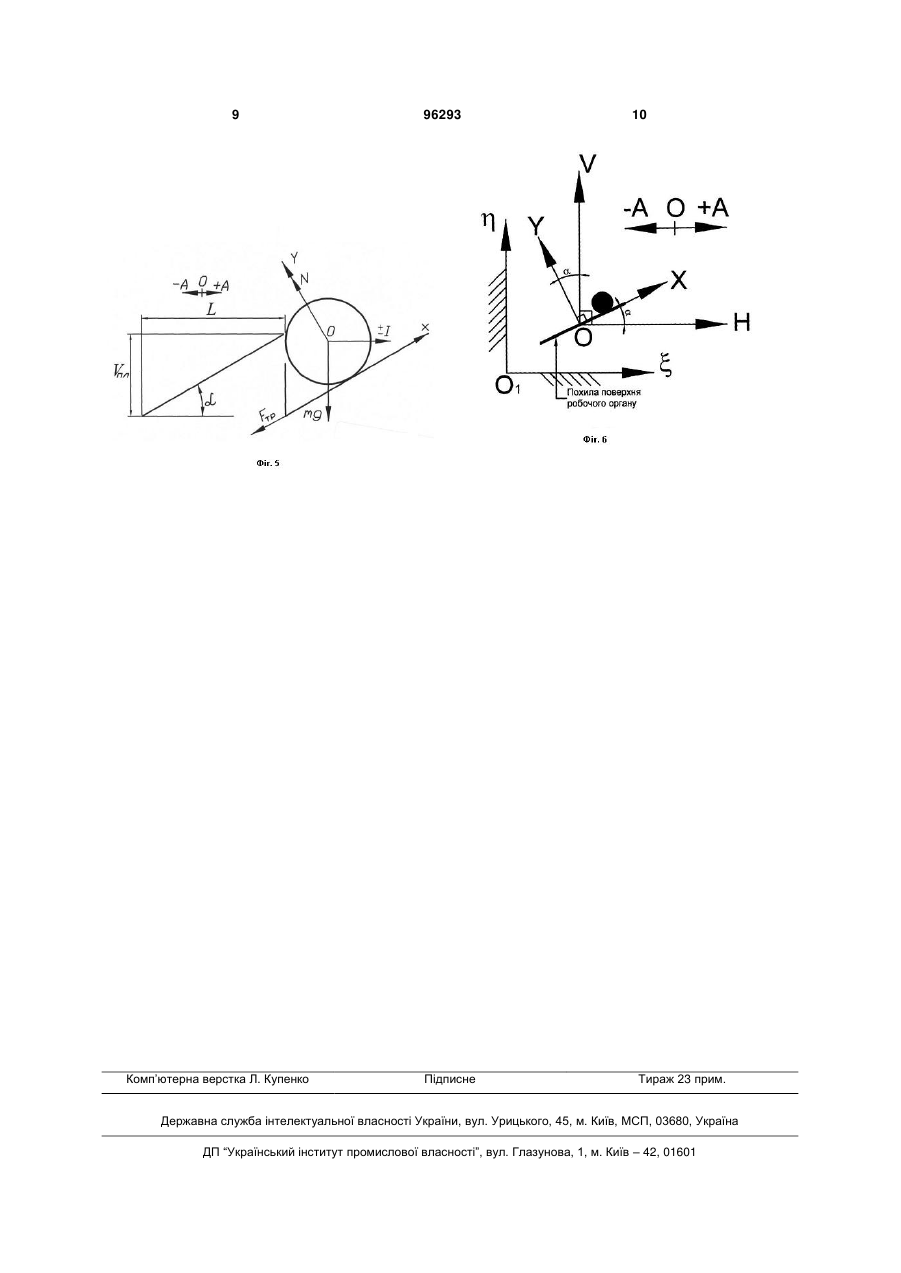
Спосіб вібропереміщення сипких харчових мас під дією механічних коливань шляхом переміщення сипких мас по робочій поверхні, який відрізняється тим, що здійснюють механічні коли C2 2 (19) 1 3 що виконує робочий орган, складений з похило встановлених у прямокутному жолобі пластин прямокутної форми, які встановлені одна за одною під кутом до горизонту і жорстко зв'язані між собою по довжині за допомогою вертикально встановлених у жолобі прямокутних пластин-перемичок, а частки продукту спочатку рухаються разом з робочим органом, знаходячись між вертикальною перемичкою і нахиленою пластиною, далі при русі робочого органу в напрямку кута між похилою пластиною і горизонтом частки продукту переміщуються ковзанням по нахиленій пластині робочого органу уверх, а після зміни напрямку руху робочого органу, частки продукту, під дією сили інерції, відриваються від верхньої частини похилої поверхні і відбувається переліт через наступну похилу поверхню згідно з напрямком останнього коливного руху робочого органу, причому процес повторюється кожні два повних циклу коливань. Похила прямокутна поверхня у подовжньому розрізі робочого органу є гіпотенузою прямокутного трикутника, причому її гострий кут з горизонтом вказує напрямок переміщення часток сипкого продукту, на етапі польоту його часток над поверхнею робочого органу. Кут між похилою прямокутною поверхнею і горизонтальним катетом може бути від 20 до 45 градусів, згідно з теоретичними і практичними дослідженнями, причому спосіб має три основні етапи, перший - рух частки продукту разом з робочим органом між вертикальною і нахиленою пластинами, другий - ковзання частки продукту по нахиленій пластині, третій - політ частки продукту через наступну нахилену пластину. Виходячи з послідовності фрагментів уповільненого перегляду швидкісного відеозапису (фіг. 1, 2, 3, 4), видно весь процес, який періодично повторюється за час двох повних періодів коливань робочого органа. Перший фрагмент, це знаходження частки продукту внизу похилої поверхні (фіг. 1). Другий фрагмент - це переміщення ковзанням по похилій поверхні уверх (фіг. 2), це відбувається за рахунок сили інерції коливного руху, спрямованого у даний момент часу вправо. Третій фрагмент (фіг. 3) - це початок польоту частинки, її відрив від похилої поверхні. Четвертий фрагмент (фіг. 4) - це завершення процесу польоту, приземлення частки у впадині іншої похилої поверхні. Процес можна поділити на три основні етапи: 1) рух частки продукту разом з коливним робочим органом між вертикальною і нахиленою пластинами; 2) ковзання частки продукту по нахиленій пластині; 3) політ частки продукту. У запропонованому способі вібропереміщення цілком залежне від співвідношень геометричних розмірів часток продукту і поверхонь, з якими він стикається, а також від кінематичних параметрів механічних коливань. Для аналітичного розгляду всіх стадій процесу, приймемо пов'язану з декою систему координат XOY (фіг. 5), у якій будемо розглядати рух часток продукту масою m аналогічно роботі [3], приймаємо частку масою m за матеріальну точку, 96293 4 на яку діє сила ваги, mg (g - прискорення вільного падіння), нормальна реакція N, сила інерції I, сила тертя Fmp, Vпл - висота похилої пластини м, L - довжина похилої поверхні м. У зв'язку з малою відстанню польоту й досить великою щільністю вантажу, що транспортується, приймаємо допущення про те, що опір повітря не робить істотного впливу на процес польоту частки і у нашому випадку ним можна знехтувати. Складемо рівняння сил, що діють на частку по осях ОХ і ОУ: m m2 cos sin t Fmp mg sin x (1) , m N mg cos m2 sin sin t y де A - амплітуда коливань робочого органа m, - циклічна частота коливань робочого органа с1 , - кут нахилу пластини, град., t - поточний час с. Оскільки удар частки при зіткненні з поверхнею деки в достатньому ступені не пружний (властивість поверхні матеріалу, з якого виконана дека і низька висота падіння), то приймемо допущення згідно з [3], що частка сковзає по поверхні уздовж осі ОХ без підскакування, тобто руху уздовж осі OY не відбувається, тобто можемо прийняти на ступні умови: y = 0, y 0, y 0. Тоді із другого рівняння системи (1) одержуємо значення N: (2) mg cos m2 sin sin t Підставивши рівняння (2) у перше рівняння системи (1) і розділивши обидві його частини на m, одержимо диференціальне рівняння руху частки уздовж ОХ: 2 cos sin t g cos 2 sin sin t g sin (3) x де tg - коефіцієнт тертя між часткою й похилою поверхнею, - кут тертя ковзання (ви значається експериментально). Інтегруючи по dt диференціальне рівняння (3) одержимо закон зміни швидкості частки: x cos t cos t0 sin cos gt t0 sin cos x0, (4) де t0 - момент початку ковзання, який визначає фазовий кут початку ковзання 0 t 0 , x 0 - початкова швидкість ковзання. Інтегруючи рівняння (4) одержимо закон руху частки уздовж ОХ на етапі ковзання: x sin cos sin t sin t0 cos t0 t t0 cos sin 1 (5) 2 gt0 t t0 cos sin gt 2 t0 cos sin x0 t t0 x0 2 , де x0 - початкова координата на етапі ковзання. На підставі вищевикладеного приймаємо, що спочатку етапу ковзання x0 = 0, x0 = 0 і на всьому етапі ковзання у0 = 0, у0 = 0 до моменту відриву t1 і початку польоту (від t0 до t1). Фазовий кут відриву: 1 t1 t1 1 . Для знаходження t0 перше рівняння системи (1) дорівняємо до нуля при (t = t0) і одержимо: 5 96293 6 g cos sin g cos g sin 0 t0 arcsin 2 (6) arcsin 2 2 cos sin cos sin Для визначення t1 складемо рівняння сил, по осі ΟΥ, діючих на частку, у момент коли робочий орган рухається від середнього до крайнього лівого положення при N = 0 (момент відриву). (7) m2 sin sin t1 mg cos 0 звідки: g 1 t1 arcsin ctg (8) 2 Тут 1 < 0, що вказує на рух деки від середнього положення вліво, протилежно обраному позитивному фазовому куту, що відповідає руху деки вправо. Визначивши t0 з виразу (6) і t1 з виразу (8), підставивши ці значення в рівняння (5) при (t=t1), визначимо переміщення х1 уздовж осі ОХ за етап ковзання. Це ж значення переміщення уздовж горизонту буде дорівнювати х1cos , якщо це значення позитивно, то вібропереміщення частки відбувається вправо, якщо негативно - уліво, згідно з фіг. 5. Необхідно визначити переміщення за етап польоту х2 і переміщення за етап ковзання х1. Визначивши х2 і x1 ми зможемо визначити середню швидкість вібропереміщення частки. Момент падіння t2 визначається фазовим кутом 2 t 2 і залежить від початкової швидкості польоту x 1 в момент відриву t1. Так, як вібропереміщення (як і коливання робочого органа) здійснюється уздовж горизонту, то етап польоту доцільно розглядати в системі координат HOV з вертикальною й горизонтальною віссю, повернутими на кут α відносно системи ΦΟΥ (фіг. 6). З моменту t1 політ вібротранспортуючого тіла уздовж осі ОХ здійснюється з початковою швидкіс x тю 1 , яку можна визначити з виразу (4), підставивши туди значення t0 з виразу (6) і t1 з виразу (8) у момент, коли t=t1. Розглядаючи схему на фіг. 6, можемо записати в проекції на вісь ОН, початкову швидкість польоту: 1 1 cos . (9) У нерухливій системі координат O1 фіг. 6 рух частки буде описано з урахуванням горизонтальної швидкості похилої пластини в момент початку польоту: 1 cost1 . (10) Швидкість у польоті уздовж осі OV можна описати як: V V1 gt п x1 sin gt п . (11) Де V1 - початкова швидкість польоту, tп - поточний час польоту, час співвіднесений з початком коливального процесу t = t1 + tп tп = t – t1. Повmax ний час польоту tп = t2 – t1,. Щодо нерухливої осі Ο1 можемо записати: (12) V1 x1 sin gtп. Дорівнявши вираз (12) до нуля, визначимо момент часу досягнення максимальної висоти vmax tп=tп по осі OV. Тоді: x sin v max tп 1 (13) g . Найбільша висота, щодо положення похилої пластини ступеня у момент ti відповідно визначиться як: v max 2 gt v Vmax V1tп max п v max 2 gt v x1 sin tп max п (14) . Vmax - повинна значно перевищувати висоту верхньої точки похилої пластини деки Vпл, для того, щоб частка перескакувала на наступну похилу пластину, з урахуванням того, що положення верхньої точки похилої поверхні змінюється уздовж горизонту за законом Asin t . Знаходження моменту падіння t2 є складним завданням, тому що форма коливної поверхні специфічна. Однак для знаходження середньої швидкості вібропереміщення, у даному випадку, немає необхідності визначати t2, важливо щоб повний час польоту гарантував необхідну висоту й довжину польоту. Виходить, умови вібропереміщення мають наступний вигляд: Vmax Vпл Ltg . (15) max L Де Vпл - висота похилої пластини робочого органу м, L - довжина проекції похилої пластини м. (фіг. 5). Якщо зробити припущення, що при виконанні умови (15) транспортується матеріал, що буде перескакувати через похилу пластину, через один період коливань, причому кожний другий період коливань буде необхідний для того, щоб після моменту t2 падіння на наступну похилу пластину частка займала вихідну позицію (фіг. 5) до початку третього періоду коливань (при перегляді вповільненого відеозапису спостерігався такий режим), то середня швидкість вібропереміщення складе: L L V . (16) 2 2 Де Τ - час періоду коливань. Приклад конкретного виконання. Експериментальні випробування діючої моделі для вібропереміщення, де механічні коливання у горизонтальній площині виконує робочий орган. Він складений з похило встановлених у прямокутному жолобі пластин прямокутної форми, які встановлені одна за одною під кутом до горизонту і жорстко зв'язані між собою по довжині за допомогою вертикально встановлених у жолобі прямокутних пластин2 2 7 перемичок. Продукт подається зверху на робочий орган і спочатку рухається разом з робочим органом, знаходячись між вертикальною перемичкою і нахиленою пластиною, далі при русі робочого органу в напрямку кута між похилою пластиною і горизонтом, частки продукту переміщуються ковзанням по нахиленій пластині робочого органу у верх, а після зміни напрямку руху робочого органу, частки продукту, під дією сили інерції, відриваються від верхньої частини похилої поверхні і відбувається переліт через наступну похилу поверхню згідно напрямку останнього коливного руху робочого органу. Процес переміщення повторюється кожні два повних цикли коливань робочого органу. Для зернових культур, цей спосіб дозволяє переміщувати зерна квасолі з швидкістю 0,467 м/с при амплітуді 6 мм і частоті коливань робочого органу 25 Гц, насіння ячменя з швидкістю 0,525 м/с при амплітуді 5 мм і частоті коливань робочого органу 25 Гц, крупи гречки з швидкістю 0,494 м/с при амплітуді 5 мм і частоті коливань робочого органу 25 Гц. Геометричні параметри робочої поверхні деки: =30 градусів до горизонту а=25,98 мм - довжина похилої пластини, b=15 мм - вертикальна грань, були вибрані, виходячи з розрахункових даних. Експериментально підтверджена можливість вібропереміщення зернових культур з кутом нахилу похилої поверхні = 20 45 градусів до горизонту. Висновки: 1) На підставі практичних експериментів теоретично обгрунтовані конструкція й фі 96293 8 зичні принципи процесу вібропереміщення сипких харчових мас на робочому органі з похилих прямокутних пластин при поздовжніх коливаннях робочого органа в горизонтальній площині. Визначенні чотири основні стадії процесу. 2) Для сипких мас певного фракційного складу проведені базові аналітичні дослідження процесу на етапах польоту й ковзання. Визначено необхідні фазові кути й граничні умови протікання існуючого процесу. 3) Аналітично визначена середня швидкість вібропереміщення сипких харчових продуктів певного фракційного складу розглянутим способом. 4) Враховуючи формулу (16), можна стверджувати, що швидкість вібропереміщення часток продукту буде більша в порівнянні з будь-яким відомим вібротранспортером в декілька разів, а це означає, що теоретична продуктивність запропонованого транспортера також в вдвічі більша. Список використаних джерел. 1. Потураев, В.Н. Вибрационные транспортирующие машины [Текст]: Основы теории и расчета / В.Н. Потураев В.П. Франчук, А.Г. Червоненко; изд. -М. : Машиностроение, 1964. -272 с. 2. Спиваковский А.О., Гончаревич И.Ф. Вибрационные конвейеры питатели и вспомогательные устройства. М., Машиностроение, 1972, с. 109-124, [прототип] 3. Блехман И.И., Джанелидзе Г.Ю. Вибрационное перемещение. - М.: Наука, 1964. - 412с. 9 Комп’ютерна верстка Л. Купенко 96293 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of vibratory displacement of bulk food masses
Автори англійськоюFalko Oleksandr Leonidovych, Kovalenko Artem Volodymyrovych
Назва патенту російськоюСпособ виброперемещения сыпучих пищевых масс
Автори російськоюФалько Александр Леонидович, Коваленко Артем Владимирович
МПК / Мітки
МПК: B65G 27/18, B65G 27/32
Мітки: вібропереміщення, сипких, мас, харчових, спосіб
Код посилання
<a href="https://ua.patents.su/5-96293-sposib-vibroperemishhennya-sipkikh-kharchovikh-mas.html" target="_blank" rel="follow" title="База патентів України">Спосіб вібропереміщення сипких харчових мас</a>
Спосіб розмірної класифікації сипких харчових продуктів
Номер патенту: 93720
Опубліковано: 10.03.2011
Автор: Фалько Олександр Леонідович
МПК: B02C 23/08, B02C 23/16, B07B 1/28
Мітки: класифікації, сипких, розмірної, продуктів, спосіб, харчових
Формула / Реферат:
Спосіб розмірної класифікації сипких харчових продуктів, що включає сепарацію вказаних сипких продуктів у циліндричному барабані-ситі, що обертається, вісь якого розташована під малим кутом до горизонту, який відрізняється тим, що барабан-сито обертають з розрахунковою кутовою швидкістю у режимі з "обваленням" та в процесі сепарації барабан-сито піддають вертикально спрямованим механічним коливанням, при цьому після завантаження в...
Спосіб визначення вібропереміщення
Номер патенту: 69675
Опубліковано: 15.09.2004
Автор: Яровой Леонід Костянтинович
МПК: G01C 3/08, G02B 11/00, G01C 3/00, G01B 9/02
Мітки: спосіб, вібропереміщення, визначення
Формула / Реферат:
Спосіб визначення вібропереміщення, який полягає в тому, що лазерне випромінювання поділяють на три пучки, перший пучок спрямовують на точку поверхні об'єкта, що досліджується, розсіяне об'єктом випромінювання фотодетектують разом з другим пучком, частота якого віддалена на частоту гетеродину відносно частоти двох інших пучків, і виділяють сигнал на частоті гетеродину, який відрізняється тим, що разом з випромінюванням, що розсіяне об'єктом,...
Установка для сушіння сипких харчових продуктів рослинного походження
Номер патенту: 61189
Опубліковано: 11.07.2011
Автори: Кухарець Савелій Миколайович, Нездвецька Інна Володимирівна, Шубенко Владислав Олексійович, Лось Леонід Васильович
МПК: A23N 12/00
Мітки: рослинного, продуктів, харчових, установка, сушіння, походження, сипких
Формула / Реферат:
1. Установка для сушіння сипких харчових продуктів рослинного походження, що містить сушильний барабан з приводом обертання, торцеві кришки, одна з яких оснащена завантажувальним, а інша - вивантажувальним отворами, джерело ІЧ-випромінювання, встановлене всередині сушильного барабана, яка відрізняється тим, що торцеві кришки встановлені нерухомо з можливістю ковзання відносно торців сушильного барабана, причому внутрішня поверхня сушильного...
Установка для сушіння сипких харчових продуктів рослинного походження
Номер патенту: 96243
Опубліковано: 10.10.2011
Автори: Нездвецька Інна Володимирівна, Лось Леонід Васильович, Кухарець Савелій Миколайович, Шубенко Владислав Олексійович
МПК: A23B 7/02, A23L 3/54, A23N 12/08, F26B 3/30
Мітки: походження, рослинного, установка, продуктів, харчових, сипких, сушіння
Формула / Реферат:
1. Установка для сушіння сипких харчових продуктів рослинного походження, що містить сушильний барабан з приводом обертання, торцеві кришки, одна з яких забезпечена завантажувальним, а інша - вивантажувальним отворами, джерело ІЧ-випромінювання, встановлене всередині сушильного барабана, яка відрізняється тим, що торцеві кришки встановлені нерухомо з можливістю ковзання відносно торців сушильного барабана, причому внутрішня поверхня...
Спосіб безперервного зволоження сипких харчових продуктів і кормів та пристрій для його здійснення
Номер патенту: 32542
Опубліковано: 15.02.2001
Автор: Мюллер Роман
МПК: B02B 1/00
Мітки: кормів, харчових, зволоження, сипких, пристрій, безперервного, продуктів, спосіб, здійснення
Текст:
...обойной му ки, светлой муки, дунста и крупки зерно доводят путем дозированного добавления воды до влаж ности помола, подают к отлежному закрому а за тем на помол г 6 Способ по п 5 отличающийся тем, что перед отлежкой зерно очищают на первой сухой и вто рой влажной или сырой ступенях, при этом до и во время второй ступени добавляют основное ко личество воды 2-7% и зерно подвергают проме жуточному хранению для влажной или сырой очистки в...
Наступний патент: Застосування сполуки, що містить кремній, як осушувача поліолефінових композицій
Випадковий патент: Комплекс тонкодисперсного дрібнення матеріалів