Спосіб і пристрій управління збуреним рухом пружно-деформованої ракети-носія навколо центру мас
Номер патенту: 102987
Опубліковано: 27.08.2013
Автори: Свириденко Микола Федорович, Горбунцов Вячеслав Васильович, Заволока Олександр Миколайович

Формула / Реферат
1. Спосіб управління збуреним рухом пружнодеформованої ракети-носія (РН) навколо центру мас, що включає визначення бортовими засобами у процесі польоту поточних значень кутових відхилень осьової лінії її корпусу від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін у місцях установки органів управління, формування в автоматі стабілізації на основі цих даних управляючого сигналу, його посилення і подачу на приводи органів управління, які здійснюють генерацію силових чинників, що забезпечують компенсацію згинальних коливань корпусу РН, який відрізняється тим, що вимірюють поточні пружні деформації елементів конструкції корпусу ракети у точках уздовж його твірних, за даними вимірювань відновлюють дійсну поточну форму вигину осьової лінії корпусу, визначають її відхилення від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкість і прискорення їх змін по всій довжині ракети-носія і формують на їх основі управляючий сигнал на приводи органів управління.
2. Пристрій управління збуреним рухом пружнодеформованої ракети-носія навколо центру мас, що включає вимірювальні пристрої, пристрій посилення і пристрій перетворення їх сигналів у сигнали управління, що подаються на приводи органів управління, які призначені для компенсації згинальних коливань, який відрізняється тим, що вимірювальні пристрої виконані у вигляді тензометричних датчиків, які встановлені на елементах конструкції корпусу ракети-носія у точках уздовж його твірних.
3. Пристрій за п. 2, який відрізняється тим, що у носовій частині ракети-носія встановлені додаткові органи управління, які виконані у вигляді перешкод, що відхиляються або висуваються у набігаючий аеродинамічний потік, та мають свої приводи.
Текст
Реферат: Запропоновані спосіб і пристрій управління збуреним рухом пружно-деформованої ракети-носія (РН) навколо центру мас. Спосіб включає визначення бортовими засобами у процесі польоту поточних значень кутових відхилень осьової лінії її корпусу від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін у місцях установки органів управління, формування в автоматі стабілізації на основі цих даних управляючого сигналу, його UA 102987 C2 (12) UA 102987 C2 посилення і подачу на приводи органів управління, які здійснюють генерацію силових чинників, що забезпечують компенсацію згинальних коливань корпусу РН. Також вимірюють поточні пружні деформації елементів конструкції корпусу ракети у точках уздовж його твірних, за даними вимірювань відновлюють дійсну поточну форму вигину осьової лінії корпусу, визначають її відхилення від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкість і прискорення їх змін по всій довжині ракети-носія і формують на їх основі управляючий сигнал на приводи органів управління. Пристрій включає вимірювальні пристрої, пристрій посилення і пристрій перетворення їх сигналів у сигнали управління, що подаються на приводи органів управління, які призначені для компенсації згинальних коливань. Вимірювальні пристрої виконані у вигляді тензометричних датчиків, які встановлені на елементах конструкції корпусу ракети-носія у точках уздовж його твірних. UA 102987 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до ракетної техніки і може бути використаний для управління збуреним рухом пружно-деформованих ракет-носіїв (РН), який супроводжується згинальними коливаннями їх корпусів у процесі польоту. Є відомий спосіб управління збуреним рухом РН, що полягає у заглушенні згинальних коливань її корпусу шляхом генерації органами управління (ОУ) системи управління (СУ) ракети компенсуючих коливань корпусу з тією ж частотою, але протилежних по фазі, використовуючи для формування сигналів, що управляють роботою ОУ, сигнали від вимірювального пристрою (датчика), що вимірює кутову швидкість відхилення осьової лінії корпусу пружно-деформованої РН від осьової лінії РН, як абсолютно твердого тіла, у місці установки ОУ та датчика (див. С. 54, 61 у статті Фрид Л. Е., Миллер К. Л. Увеличение устойчивости автопилота методом демпфирования изгибных колебаний корпуса ракеты // Вопросы ракетной техники.-1962. - № 5. - С. 47-64). Проте ефективність способу істотно залежить від правильного вибору місця установки датчика і ОУ, яке визначається невідомою наперед формою вигину корпусу в умовах дії збурюючих чинників польоту (вітер тощо), що мають, до того ж, випадковий характер (див. С. 61-72 у кн. Ракета как объект управления / И. М. Игдалов, Л. Д. Кучма, Н. В. Поляков, Ю. Д. Шептун. - Днепропетровск: АРТ-ПРЕСС, 2004.-544 с.). Є відомий пристрій управління збуреним рухом пружно-деформованої РН навколо центру мас (ЦМ), виконаний у вигляді допоміжного ОУ - ракетного двигуна, встановленого сумісно з датчиком кутової швидкості відхилення осьової лінії корпусу пружно-деформованої РН від осьової лінії корпусу РН, як абсолютного твердого тіла, в одному й тому ж місці корпусу ракети; таким місцем, "з теоретичної точки зору, звичайно є носова або хвостова частина РН" (див. с 50-52 у статті Фрид Л. Е., Миллер К. Л. Увеличение устойчивости автопилота методом демпфирования изгибных колебаний корпуса ракеты // Вопросы ракетной техники.-1962. - № 5. - С. 47-64). Недоліком вказаного пристрою є невизначеність вибору конкретного місця установки ОУ і датчика кутової швидкості в умовах дії польотних збурень, що змінюються у часі. Є відомий пристрій управління збуреним рухом РН навколо ЦМ, виконаний у вигляді аеродинамічних поверхонь, встановлених, з можливістю зміни їх положення у процесі польоту, 5 у носовій частині ракети (Пат. на винахід 5322248 США, МПК B64G 1/14. Methods and arrangements tailoring aerodynamic forces afforded by a pay load to reduce flight loads and to assist flight control for the coupled system / Mohamed M. Ra-gab; заявник і патентовласник General Dynamics Corporation Space System Division.-857876; заявл. 26.03.1992; опубл. 21.06.1994), і пристрій для забезпечення шляхової і поперечної стійкості руху літального апарата в збуреній атмосфері у вигляді керуючих аеродинамічних поверхонь, що відхилюються (флаперони, елерони тощо), розташованих на зовнішній поверхні апарата (Пат. на винахід 2352498 7 Російська Федерація, МПК В64С 13/00. Способ управления устойчивостью летательного аппарата в полете и устройство для его осуществления; заявник і патентовласник Попов В. Н.2007145151 /11; заявл. 04.12.2007; опубл. 20.04.2009, Бюл. № 11). Проте вказані ОУ використовуються для управління збуреним рухом РН і літального апарата, як абсолютно твердих тіл, без урахування пружних деформацій їх корпусів в умовах польоту. Найближчим аналогом способу, що заявляється, вибраним за прототип, є спосіб управління збуреним рухом пружно-деформованої РН, що включає вимірювання поточних значень кутових відхилень осьової лінії корпусу деформованої ракети від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін у процесі польоту і формування в автоматі стабілізації (АС) з їх використанням управляючого сигналу на приводи ОУ, що здійснюють генерацію силових чинників, які забезпечують компенсацію згинальних коливань корпусу (див. С. 159-161 у кн. Колесников К. С. Динамика ракет. - М.: Машиностроение, 1980.376 с.). Недоліком способу є необхідність врахування при виборі місць установки датчиків і ОУ дійсних форм коливань пружно-деформованого корпусу, які, як правило, не відомі наперед. Крім того, додаткова помилка обумовлена впливом на вигин корпусу і, отже, на роботу АС коливань рідких компонентів палива у паливних баках, спектр яких для важких РН значного подовження (типу "Зеніт", "Протон", "Аріан" і т. п.) перетинається з характерними спектрами згинальних коливань корпусів РН (див. с. 135-144 у кн. Динамика старта жидкостных ракетносителей космических аппаратов / Г. И. Богомаз, Н. Е. Науменко, М. Б. Соболевская, И. Ю. Хижа. - К.: Наук, думка, 2005.-248 с.; с. 19 у кн. Айзенберг Я. Е., Сухоребрий В. Г. Проектирование систем стабилизации носителей космических аппаратов. - М.: Машиностроение, 1986.-224 с.). Наявність коливань компонентів палива у паливних баках обумовлює додаткові сили, діючі на корпус ракети, що згинається у польоті (див. С. 200 у кн. 1 UA 102987 C2 5 10 15 20 25 30 35 40 45 50 55 60 Богомаз Г. И., Сирота С. А. Колебания жидкости в баках. - Днепропетровск: НАН Украины и НКА Украины, Институт технической механики, 2002.-306 с.), точне визначення яких розрахунковим шляхом не видається можливим (див. с. 46, 47 у кн. Колесников К.С. Динамика ракет. - М.: Машиностроение, 1980.-376 с.). Загальними істотними ознаками відомого способу-прототипу і способу, що заявляється, є визначення бортовими засобами у процесі польоту поточних значень кутових відхилень осьової лінії корпусу РН, що згинається, від осьової лінії корпусу РН, як абсолютно твердого тіла, швидкості і прискорення цих відхилень у місцях установки органів управління, яке здійснюється у способі-прототипі датчиками кутів (вільними гіроскопами), датчиками кутових швидкостей (швидкісними гіроскопами) і кутовими акселерометрами, і формування в АС на основі цих даних управляючого сигналу, його посилення і подачу на приводи ОУ, що здійснюють генерацію силових чинників, які забезпечують компенсацію згинальних коливань корпусу РН. При реалізації способу-прототипу, у процесі польоту виникає додаткова помилка у зв'язку з тим, що (див. С. 160-161 у кн. Колесников К. С. Динамика ракет. - М.: Машиностроение, 1980.376 с.) місце розташування вказаних датчиків залишається у процесі польоту постійним, а форма осьової лінії корпусу, що згинається, швидкість і прискорення її зміни у процесі польоту безперервно змінюються через випадковий характер зовнішніх збурень, зміни кількості і характеру поведінки рідких компонентів палива у паливних баках і т. п. Це знижує ефективність управління і використання енергетичних і міцнісних ресурсів РН при вирішуванні різних задач польоту. Найближчим аналогом пристрою, що заявляється, вибраним за прототип, є пристрій для управління збуреним рухом пружно-деформованої РН навколо ЦМ, що містить основний контур управління рухом РН навколо ЦМ, як абсолютно твердого тіла, і допоміжний контур для заглушення згинальних коливань корпусу, який включає вимірювальний пристрій (датчик) у вигляді швидкісного гіроскопа, що розташований у місці розміщення ОУ і вимірює в цьому місці швидкість зміни кутового відхилення осьової лінії пружно-деформованого корпусу від осьової лінії корпусу РН, як абсолютно твердого тіла; пристрій посилення і пристрій перетворення його сигналів у сигнал управління, що подається на привід допоміжного ОУ у вигляді поворотного рульового двигуна малої тяги для вироблення силового чинника, компенсуючого дію збурюючих сил на пружно-деформований у польоті корпус (див. рис. 1 на с. 48 у статті Фрид Л. Е., Миллер К. Л. Увеличение устойчивости автопилота методом демпфирования изгибных колебаний корпуса ракеты // Вопросы ракетной техники.-1962. -№ 5. - С. 47-64). Загальними істотними ознаками відомого пристрою і того, що заявляється, є наявність вимірювальних пристроїв для визначення поточних значень кутових відхилень осьової лінії корпусу пружно-деформованої РН від осьової лінії корпусу РН, як абсолютно твердого тіла, і швидкості їх змін, пристрою посилення і пристрою перетворення отриманих даних у сигнал на привід допоміжного ОУ. Недоліком прототипу є те, що формування сигналу на привід допоміжного ОУ здійснюється на основі даних, отриманих від гіроскопічного вимірювального пристрою, який розташовано "у носовій або хвостовій частині РН", що не дозволяє враховувати зміну форми коливань осьової лінії корпусу РН у процесі польоту. Крім того, установка гіроскопічного вимірювального пристрою в хвостовій частині РН (тобто у відсіку маршового двигуна) пов'язана із значним його вібронавантаженням, що обумовлює збільшення похибки вимірювань або ж необхідність реалізації додаткових заходів щодо забезпечення вібростійкості гіроскопічного вимірювального пристрою (див. с 60 у статті Фрид Л. Е., Миллер К. Л. Увеличение устойчивости автопилота методом демпфирования изгибных колебаний корпуса ракеты // Вопросы ракетной техники.1962. - № 5. - С. 47-64). В основу винаходу поставлена задача удосконалення способу управління збуреним рухом пружно-деформованої РН навколо ЦМ шляхом організації нового способу отримання об'єктивних даних про поточні значення кутових відхилень осьової лінії корпусу РН, що згинається у польоті, від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін по довжині корпусу. Кутові відхилення осьової лінії, швидкість і прискорення їх зміни пропонується визначати на основі дійсної поточної форми осьової лінії корпусу пружнодеформованої РН, відновлюваної за наслідками вимірювань у процесі польоту, яка інтегрально й об'єктивно відображає дію всіх збурень систематичного і випадкового характеру, а так само демпфуючі властивості самої РН, що дозволить підвищити ефективність управління і використання енергетичних і міцнісних ресурсів ракети. В основу винаходу поставлено також задачу удосконалення пристрою для управління збуреним рухом пружно-деформованої РН навколо ЦМ, в якому шляхом введення нових конструктивних елементів і зв'язків між ними буде забезпечено можливість відновлення за 2 UA 102987 C2 5 10 15 20 25 30 35 40 45 50 55 60 наслідками вимірювань у польоті поточної форми осьової лінії корпусу, що дозволить підвищити точність визначення її кутових відхилень від осьової лінії ракети, як абсолютно твердого тіла, швидкості і прискорення їх зміни по всій довжині корпусу пружно-деформованої РН, зокрема в місці установки ОУ. Поставлена задача вирішується таким чином, що в способі управління збуреним рухом пружно-деформованої РН навколо ЦМ відновлюють поточну форму вигину осьової лінії корпусу за результатами вимірювань у польоті пружних деформацій елементів його конструкції, наприклад оболонок (див. статтю Кирикин А. А., Пинчук Д. А. Методика экспериментального определения упругих характеристик летательных аппаратов // Самолѐтостроение. Техника воздушного флота. - Харьков: ХАИ, 1977. - Вып. 41. - С. 80-85), уздовж його твірних, визначають по ній відхилення осьової лінії корпусу РН від осьової лінії корпусу РН, як абсолютно твердого тіла, швидкість і прискорення їх змін по всій довжині РН, у тому складі у місцях установки ОУ, і з використанням цих даних формують управляючий сигнал на приводи ОУ для ефективної компенсації збурень, що викликають вигин корпусу РН. Поставлена задача вирішується також тим, що у пристрої для управління збуреним рухом пружно-деформованої ракети-носія навколо ЦМ, що містить вимірювальні пристрої, пристрій посилення і пристрій перетворення їх сигналів у сигнал управління, а також ОУ з приводами, вимірювальні пристрої, згідно з винаходом, вимірювальні пристрої виконані у вигляді тензометричних датчиків, встановлених на елементах конструкції корпусу, наприклад на поверхні його оболонок, у точках уздовж його твірних. Крім того, пристрій містить додаткові ОУ, що встановлені у носовій частині ракети-носія, які виконані у вигляді перешкод, що відхиляються або висуваються у набігаючий аеродинамічний потік, та мають свої приводи. Порівняльний аналіз з прототипами показує, що спосіб, що заявляється, і пристрій управління збуреним рухом пружно-деформованої РН навколо ЦМ відрізняються тим, що: 1) вимірюють у польоті поточні пружні деформації елементів конструкції корпусу РН, наприклад оболонок, уздовж його твірних; 2) за виміряними деформаціями відновлюють поточну форму вигину осьової лінії корпусу; 3) визначають, з урахуванням відновленої поточної форми вигину осьової лінії корпусу пружно-деформованої РН, її відхилення від осьової лінії корпусу РН, як абсолютно твердого тіла, швидкості і прискорення їх змін по всій довжині корпусу РН, у тому числі у місцях установки ОУ; використання відновленої поточної форми вигину осьової лінії корпусу пружнодеформованої РН для визначення швидкості і прискорення змін по всій довжині корпусу РН за допомогою чисельного диференціювання на борту РН відновленої поточної форми вигину осьової лінії корпусу пружно-деформованої РН дає практичну можливість підвищити якість управління шляхом врахування в законі управління реальних прискорень змін виміряних відхилень; 4) вимірювальні пристрої виконані у вигляді тензометричних датчиків, встановлених на елементах конструкції корпусу РН, наприклад на поверхні його оболонок уздовж його твірних; 5) у носовій частині корпусу встановлені додаткові ОУ, які виконані у вигляді перешкод, що відхиляються або висуваються в набігаючий аеродинамічний потік, які мають свої приводи. Сукупність вказаних відмітних ознак 1) - 4) є достатньою у всіх випадках, на які поширюється обсяг правового захисту; відмітна ознака 5) характеризує корисну модель в окремих випадках її виконання. Вимірювання в процесі польоту бортовими засобами поточних пружних деформацій оболонок корпусу уздовж його твірних дозволяє здійснювати на основі отриманих даних визначення поточної форми осьової лінії корпусу пружно-деформованої РН і дійсні відхилення цієї осьової лінії від осьової лінії ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін по всій довжині РН, у тому числі у місцях установки ОУ, що адекватно відображають як дію всіх збурень (систематичних і випадкових), так і демпфуючі властивості самої РН. Формування на їх основі управляючого сигналу на приводи ОУ дозволить забезпечити стійкий політ з максимальною ефективністю використання бортових енергетичних і міцнісних ресурсів РН за рахунок зменшення навігаційної похибки, збільшення допустимих навантажень на корпус і т. п. (див. с. 147-148 у кн. Колесников К. С. Динамика ракет. - М.: Машиностроение, 1980.-376 с.). Виконання пристрою управління збуреним рухом пружно-деформованої РН навколо ЦМ з вимірювальними пристроями у вигляді тензометричних датчиків, встановлених на елементах конструкції корпусу РН, наприклад на поверхні його оболонок, уздовж його твірних дозволяє не тільки визначати на основі отриманих даних поточну форму вигину осьової лінії корпусу, але й достатньо просто відфільтровувати високочастотні перешкоди виміряного сигналу, не спотворюючи його низькочастотну складову, яка дає найбільший вплив на міцнісні 3 UA 102987 C2 5 10 15 характеристики РН (див. С. 20 у кн. Айзенберг Я. Е., Сухоребрый В. Г. Проектирование систем стабилизации носителей космических аппаратов. - М.: Машиностроение, 1986.-224 с.). Використання забезпечених приводами додаткових ОУ у вигляді перешкод, що відхиляються або висуваються в набігаючий повітряний потік (за сигналом, сформованим на основі визначення відхилень дійсної осьової лінії корпусу пружно-деформованої РН від осьової лінії ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін), встановлених у носовій частині РН, найбільш навантаженій аеродинамічними силами на ділянці атмосферного польоту РН (див. С. 121-122 у кн. Основы проектирования летательных аппаратов (транспортные системы) / Под ред. B. П. Мишина. - М.: Машиностроение, 1985.-360 с.), дозволяє значно зменшити навантаження на корпус ракети, які обумовлені його згинальними деформаціями, шляхом їх компенсації моментом, що генерується даними ОУ при їх взаємодії з набігаючим аеродинамічним потоком, і тим самим мінімізувати витрати бортових енергоресурсів на функціонування ОУ (див. с. 121-125 у статті Войтенко Д. М., Зубков А. И., Панов Ю. А. Обтекание цилиндрического препятствия на пластине сверхзвуковым потоком газа // Изв. АН СССР. Сер. Механика жидкости и газа.-1966. -№ 1. -C. 121-125) і підвищити ефективність управління польотом пружно-деформованої РН. Крім того, застосування додаткових ОУ сприяє розширенню як функціональних можливостей запропонованого способу і пристрою управління збуреним рухом пружно-деформованої РН, так і розширенню області застосування винаходу в цілому. 20 ФОРМУЛА ВИНАХОДУ 25 30 35 40 1. Спосіб управління збуреним рухом пружно-деформованої ракети-носія (РН) навколо центру мас, що включає визначення бортовими засобами у процесі польоту поточних значень кутових відхилень осьової лінії її корпусу від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкості і прискорення їх змін у місцях установки органів управління, формування в автоматі стабілізації на основі цих даних управляючого сигналу, його посилення і подачу на приводи органів управління, які здійснюють генерацію силових чинників, що забезпечують компенсацію згинальних коливань корпусу РН, який відрізняється тим, що вимірюють поточні пружні деформації елементів конструкції корпусу ракети у точках уздовж його твірних, за даними вимірювань відновлюють дійсну поточну форму вигину осьової лінії корпусу, визначають її відхилення від осьової лінії корпусу ракети, як абсолютно твердого тіла, швидкість і прискорення їх змін по всій довжині ракети-носія і формують на їх основі управляючий сигнал на приводи органів управління. 2. Пристрій управління збуреним рухом пружно-деформованої ракети-носія навколо центру мас, що включає вимірювальні пристрої, пристрій посилення і пристрій перетворення їх сигналів у сигнали управління, що подаються на приводи органів управління, які призначені для компенсації згинальних коливань, який відрізняється тим, що вимірювальні пристрої виконані у вигляді тензометричних датчиків, які встановлені на елементах конструкції корпусу ракети-носія у точках уздовж його твірних. 3. Пристрій за п. 2, який відрізняється тим, що у носовій частині ракети-носія встановлені додаткові органи управління, які виконані у вигляді перешкод, що відхиляються або висуваються у набігаючий аеродинамічний потік, та мають свої приводи. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for control of perturbed motion of elastodeformed carrier rocket around center of mass
Автори англійськоюHorbuntsov Viacheslav Vasyliovych, Zavoloka Oleksandr Mykolaiovych, Svyrydenko Mykola Fedorovych
Назва патенту російськоюПредложены способ и устройство управления возмущенным движением упругодеформированной ракеты-носителя вокруг центра масс
Автори російськоюГорбунцов Вячеслав Васильевич, Заволока Александр Николаевич, Свириденко Николай Федорович
МПК / Мітки
МПК: B64C 13/00, B64G 1/24
Мітки: ракети-носія, рухом, пристрій, центру, мас, управління, пружно-деформованої, спосіб, збуреним
Код посилання
<a href="https://ua.patents.su/6-102987-sposib-i-pristrijj-upravlinnya-zburenim-rukhom-pruzhno-deformovano-raketi-nosiya-navkolo-centru-mas.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій управління збуреним рухом пружно-деформованої ракети-носія навколо центру мас</a>
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас
Номер патенту: 11645
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Булгаков Віталій Михайлович, Мирна Олена Володимирівна
МПК: B64G 1/24
Мітки: пристрій, відмовостійкого, апарата, мас, керування, космічного, рухом, центру
Формула / Реферат:
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас, що включає релейний гіроскопічний датчик кутової швидкості, блок керування виконавчим органом та виконавчий орган, генератор коливань та пристрій порівняння, релейний гіроскопічний датчик кутової швидкості має датчик моменту, що встановлено на осі рамки релейного гіроскопічного датчика кутової швидкості, причому вихід генератора коливань з'єднаний з датчиком...
Пристрій для керування рухом космічного апарату навколо центру мас
Номер патенту: 3991
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: мас, пристрій, космічного, апарату, центру, рухом, керування
Формула / Реферат:
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный...
Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення
Номер патенту: 46239
Опубліковано: 15.05.2002
Автори: Агафонов Юрій Миколайович, Піскачов Олександр Іванович, П'янков Анатолій Андрійович
МПК: B62D 53/00, B62D 13/00
Мітки: здійснення, рухом, автопоїзда, сідлового, спосіб, управління, пристрій
Формула / Реферат:
1. Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між...
Спосіб визначення координат центру жорсткості пружно підвішеної платформи
Номер патенту: 46330
Опубліковано: 15.05.2002
Автори: Тарасевич Микола Іванович, Санкін Анатолій Олексійович, Корнієць Ірина Василівна, Богдан Кім Степанович
МПК: G01M 5/00, G01G 23/00
Мітки: платформи, жорсткості, центру, визначення, спосіб, координат, пружної, підвішеної
Формула / Реферат:
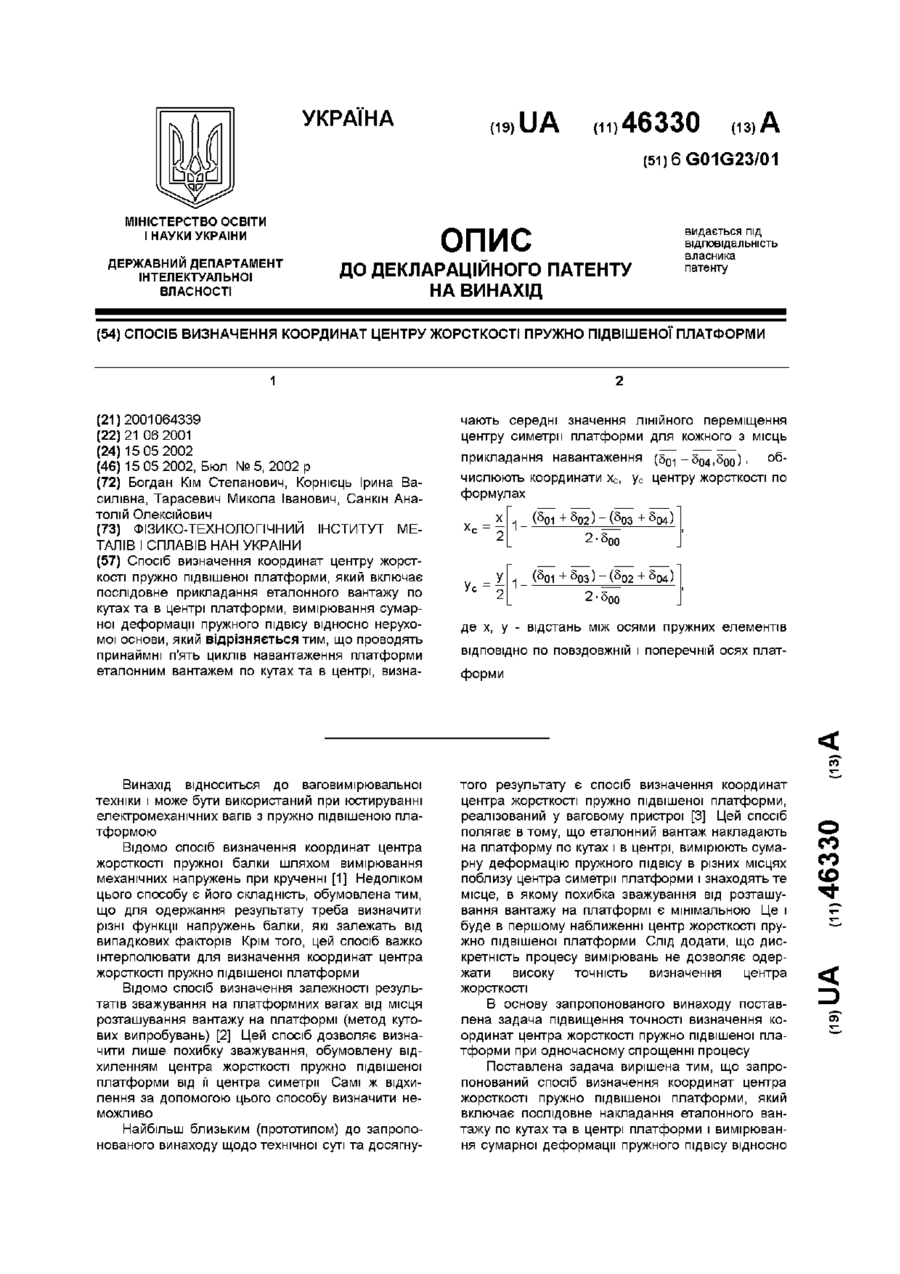
Спосіб визначення координат центру жорсткості пружно підвішеної платформи, який включає послідовне прикладання еталонного вантажу по кутах та в центрі платформи, вимірювання сумарної деформації пружного підвісу відносно нерухомої основи, який відрізняється тим, що проводять принаймні п'ять циклів навантаження платформи еталонним вантажем по кутах та в центрі, визначають середні значення лінійного переміщення центру симетрії платформи для...
Система дистанційного управління рухом безпілотного літального апарата
Номер патенту: 81370
Опубліковано: 25.06.2013
Автори: Тупіцин Микола Федорович, Матійчик Денис Михайлович, Коваль Олександр Васильович
МПК: B64C 19/00, B64C 13/00, B64C 13/16
Мітки: дистанційного, безпілотного, апарата, система, рухом, літального, управління
Формула / Реферат:
Система дистанційного управління рухом безпілотного літального апарата, яка складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота, яка відрізняється...
Попередній патент: Роторний поршневий двигун
Наступний патент: Полістирольний картинний лак для живопису
Випадковий патент: Нейроактивні стероїди ряду андростанів та прегнанів, фармацевтична композиція і спосіб лікування (варіанти)