Спосіб визначення параметрів руху повітряного джерела радіовипромінювання
Номер патенту: 107381
Опубліковано: 10.06.2016
Автори: Нагорнюк Олександр Анатолійович, Дзюбчук Роман Васильович, Петраш Сергій Віталійович, Павлюк Володимир Володимирович
Формула / Реферат
Спосіб визначення параметрів руху повітряного джерела радіовипромінювання, який відрізняється тим, що в процесі польоту об'єкта одним пасивним радіотехнічним засобом вимірюються пеленги та, за характеристиками, параметрами сигналів випромінювання бортової радіолокаційної апаратури і тактико-технічними характеристиками існуючих повітряних об'єктів, визначається тип літака, за результатами робиться висновок про відповідність параметрів його руху встановленим маршрутам, потенційну небезпеку, яку він становить.
Текст
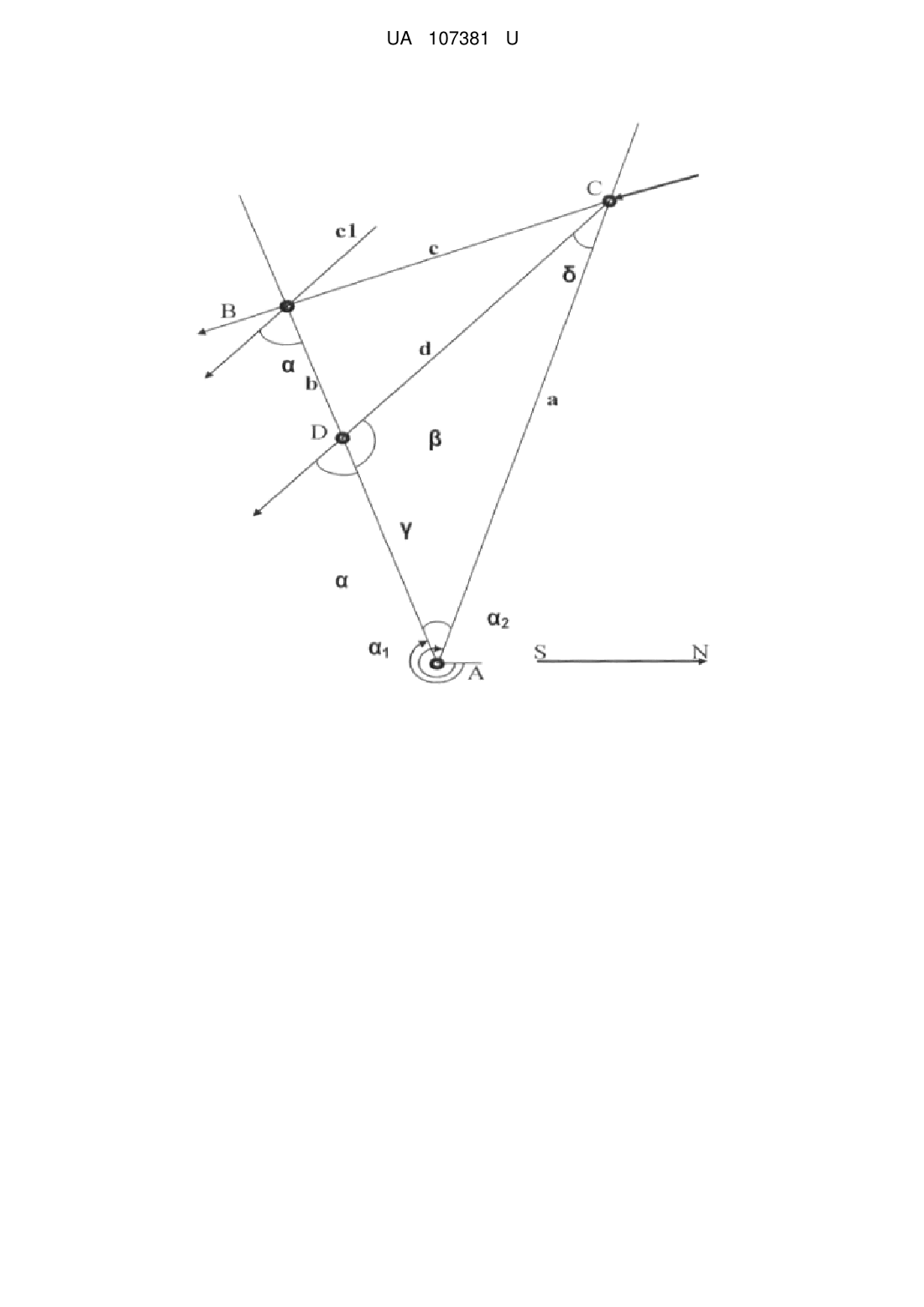
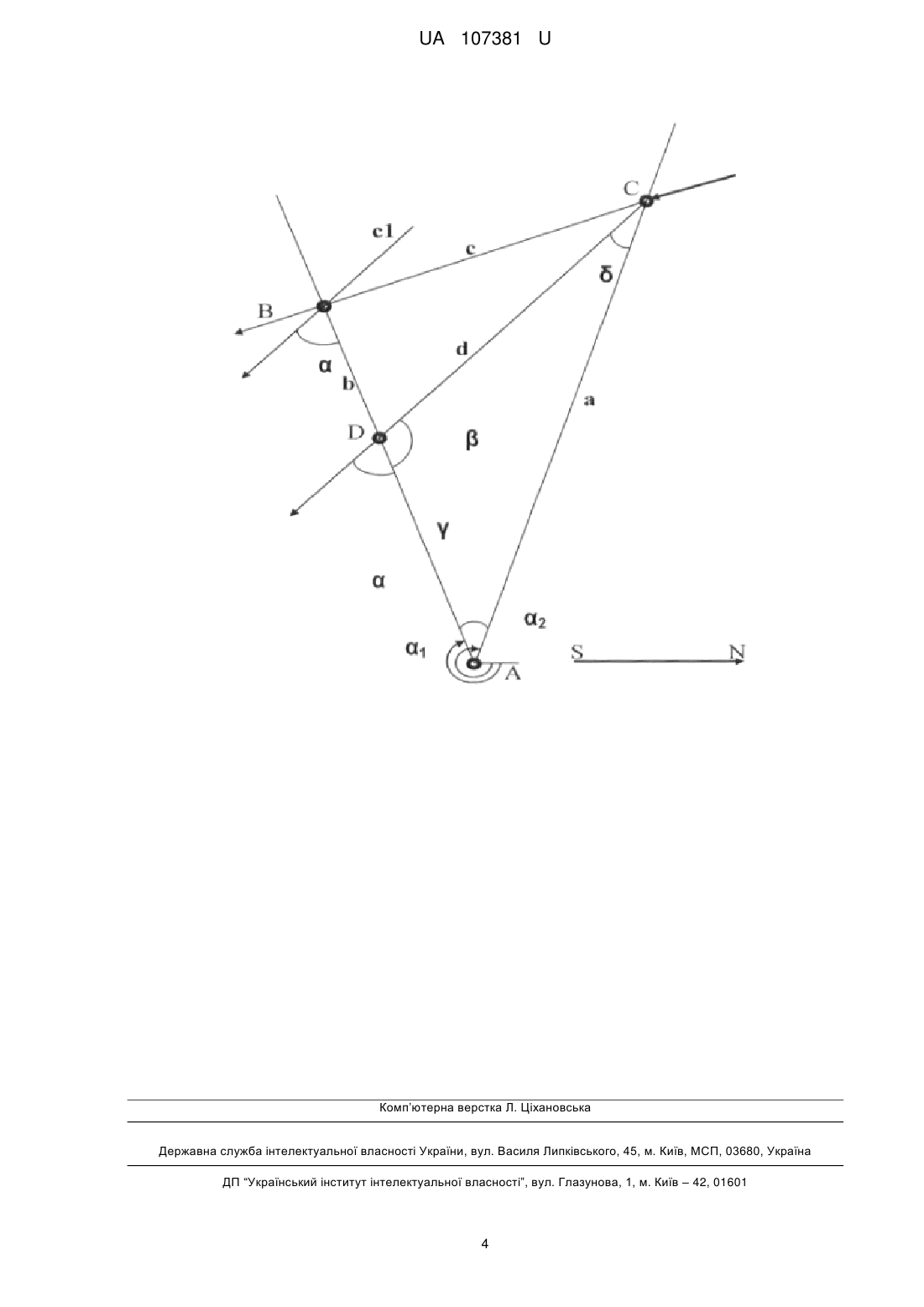
Реферат: Спосіб визначення параметрів руху повітряного джерела радіовипромінювання полягає в тому, що в процесі польоту об'єкта одним пасивним радіотехнічним засобом вимірюються пеленги та, за характеристиками, параметрами сигналів випромінювання бортової радіолокаційної апаратури і тактико-технічними характеристиками існуючих повітряних об'єктів, визначається тип літака. За результатами робиться висновок про відповідність параметрів його руху встановленим маршрутам, потенційну небезпеку, яку він становить. UA 107381 U (54) СПОСІБ ВИЗНАЧЕННЯ ПАРАМЕТРІВ РУХУ ПОВІТРЯНОГО ДЖЕРЕЛА РАДІОВИПРОМІНЮВАННЯ UA 107381 U UA 107381 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі систем навігації, зокрема до систем визначення параметрів руху повітряних об'єктів, та може бути використана в системах моніторингу руху повітряних об'єктів, для контролю відхилення від визначеного маршруту руху літака, що може становити потенційну небезпеку для інших учасників руху та стаціонарних об'єктів [1]. Відомі способи визначення параметрів руху повітряного джерела радіовипромінювання передбачають обробку інформації за допомогою декількох засобів [2-7]. Недоліком відомих способів, вибраних як прототип, є те, що часто, для спостереження за рухомим об'єктом, доступний лише один радіотехнічний засіб, особливо при значних відхиленнях від визначених маршрутів руху літальних об'єктів, унаслідок цього система визначення параметрів руху стає не здатною виконувати завдання за призначенням, рухомий об'єкт стає потенційно небезпечним. У основу корисної моделі поставлено задачу створити спосіб визначення параметрів руху повітряного джерела радіовипромінювання, який шляхом використання інформації з одного пасивного радіотехнічного засобу та вимірюванням пеленгів і визначенням типу літака забезпечить оперативний контроль відповідності реального маршруту заданому. Для вирішення поставленої задачі у способі визначення параметрів руху повітряного джерела радіовипромінювання, який полягає в тому, що в процесі польоту об'єкта одним пасивним радіотехнічним засобом вимірюються пеленги та, за характеристиками, параметрами сигналів випромінювання бортової радіолокаційної апаратури і тактико-технічними характеристиками існуючих повітряних об'єктів, визначається тип літака. За результатами робиться висновок про відповідність параметрів його руху встановленим маршрутам, потенційну небезпеку, яку він становить. Суть запропонованої корисної моделі полягає у наступному: Виконання завдань, які стоять перед літаками, та й їх безпечний рух взагалі неможливий без обладнання літаків різноманітними за призначенням та принципом роботи радіоелектронними системами. Найбільш поширеними серед них є панорамні радіолокаційні станції (РЛС) (забезпечують автономну навігацію та радіолокаційний моніторинг місцевості), РЛС забезпечення безпеки польотів і радіонавігаційні системи. Проведений аналіз бортових РЛС повітряних об'єктів різного типу показав таке: характеристики та параметри сигналів випромінювання бортової радіолокаційної апаратури в більшості випадків дозволяють визначити її тип та тип літака, на якому вона встановлена; тактико-технічні характеристики повітряних об'єктів, особливо цивільної авіації, є широкодоступними; у зоні супроводження пасивного радіотехнічного засобу моніторингу повітряний об'єкт перебуває в середньому від двох до шести хвилин, що дозволяє вважати його рух у межах даної зони прямолінійним та рівномірним, особливо це справедливо для літаків пасажирської та військово-транспортної авіації. Будь-яка бортова РЛС характеризується певним сектором огляду простору, який у більшості випадків відомий. Типовим вважається сектор огляду «+60°» відносно осьової лінії літака в горизонтальній площині. Позначимо цей кут α. Припустимо, що радіотехнічним засобом, розміщеним у точці А, відмічено роботу бортової РЛС літака у секторі, який обмежений променями а і b протягом часу t (кресл.). Аналіз виміряних параметрів бортової РЛС дозволяє зробити висновок про її тип та належність до конкретного типу літака. Вважаючи, що літак рухається із крейсерською швидкістю, яка є відомою, визначимо пройдений ним шлях: St Vt , (1) де V - крейсерська швидкість літального засобу; t - час, за який літак пройшов відстань від початкового до кінцевого пеленга в зоні роботи радіотехнічного засобу. Нехай промінь а буде визначати початковий пеленг об'єкта α1, а промінь b - його кінцевий пеленг α2. Тоді відмітити об'єкт на пеленгу α1 можна лише у випадку, коли кут ВСА не більший кута α відхилення променя його бортової РЛС від осьової лінії. На основі цього факту приходимо до висновку, що при вході в зону роботи радіотехнічного засобу кут між напрямком польоту об'єкта с та променем а не міг бути більшим α. На пеленгу, який визначається променем b, літак вийшов із зони супроводження. Це могло відбутися лише у випадку, коли кут між напрямком його польоту с1 та променем b приблизно дорівнює α (при меншому куті ціль продовжувала б залишатися на супроводженні, а при більшому контакт з літаком був би втрачений значно раніше). Перемістимо пряму c1 паралельно самій собі до тих пір, поки вона не перетне промінь а у точці входу літака в зону супроводження 1 UA 107381 U 5 С. У результаті переміщення отримуємо точку виходу цілі із зони супроводження D та напрямок її польоту в межах зони супроводження d. При переміщенні прямої CD паралельно самій собі в межах сектора супроводження отримуємо множину значень дальності, на якій міг знаходитися повітряний об'єкт щодо радіотехнічного засобу. Проте відрізок CD фактично є шляхом, пройденим літаком при крейсерській швидкості за час її супроводження. Це дозволяє однозначно визначити положення відрізка CD на променях а та b. Розглянемо трикутник ACD. Сторона DC дорівнює пройденому шляху S(t), який визначається формулою (1). Кут DAC визначимо як різницю між початковим та кінцевим пеленгом цілі: 10 DAC 1 2 , (2) Визначимо кут ADC. Його значення залежатиме від принципу огляду поверхні Землі бортовою РЛС, тобто переднього чи бокового огляду: ADC 360 2 180 , 2 (3) 15 Якщо бортова РЛС бокового огляду, то значення α визначатиметься як: k 90 O , 2 (4) Якщо переднього огляду, то 20 k 180 O , 2 (5) де k O - сектор сканування бортової РЛС. Знаючи два кути трикутника, можемо визначити третій кут: DCA 180 180 180 , (6) 25 Застосувавши теорему синусів, визначимо дві інші сторони трикутника ADC: AD d sin , sin AC a d 30 35 40 45 sin , sin (7) (8) Таким чином, визначено відстань до рухомого повітряного об'єкта на початковому та кінцевому пеленгу, що дозволяє оцінити район його польоту. Він збігатиметься з прямою CD з точністю, яка визначається точністю припущень про крейсерську швидкість повітряного об'єкта та про прямолінійність і рівномірність його руху в зоні спостереження. Розробленому підходу до визначення параметрів руху повітряних об'єктів за допомогою одного радіотехнічного засобу притаманні похибки, викликані припущенням про апріорно невідому швидкість повітряного об'єкта та сектор огляду бортової РЛС, якщо він не достовірно відомий. Похибка визначення швидкості буде призводити до зміни довжини відрізка AD і, як результат, його переміщення паралельно самому собі у межах сектора супроводження. Похибка встановлення сектора огляду бортової РЛС призведе до зміни кута нахилу відрізка AD. У результаті обидві похибки будуть викликати зміну довжин відрізків АС та AD, які є шуканими інформативними параметрами. Проведені дослідження показують, що точність запропонованого підходу до визначення параметрів руху повітряного об'єкта окремим радіотехнічним засобом, що працює в пасивному режимі, значною мірою визначається ймовірністю правильної ідентифікації типу літака, за яким здійснюється спостереження. У разі забезпечення контролю за літаками, що здійснюють 2 UA 107381 U 5 10 15 20 25 пасажирські авіаперевезення або спостережні польоти у рамках Договору про відкрите небо [1], дану ймовірність можна вважати близькою до 1. У такому разі загальна похибка визначення маршруту руху літака буде знаходитися в межах 10-15 % від дальності до нього. Джерела інформації: 1. Договір з відкритого неба (Постатейна характеристика) [Електронний ресурс]. - Режим доступу: http://zakon2.rada.gov.ua/laws/show/994_316. 2. Смирнов Ю.А. Радиотехническая разведка / Ю.А. Смирнов. - М.: Воениздат, 2001-456 с. 3. Принципи створення пасивної багатопозиційної радіолокаційної просторово рознесеної системи в зоні дії радіолокаційної станції дальнього виявлення / [Г.В. Певцов, А.Я. Яцуценко, Д.В. Карлов та ін.] // Наука і техніка Повітряних Сил Збройних Сил України. - 2010. - Вип. 2 (4). С. 91-97. 4. Жовноватюк P.M. Визначення параметрів рухомих джерел радіовипромінювання пасивними системами радіомоніторингу / P.M. Жовноватюк // Збірник наукових праць Військового інституту Київського національного університету імені Тараса Шевченка. - К.: ВІКНУ. - 2007. - № 8. - С. 72-80. 5. Писарчук О.О. Методика визначення координат рухомих об'єктів за інформацією від несинхронізованих у часі та просторі вимірювачів / О.О. Писарчук, А.Л. Мельник // Проблеми створення, випробування, застосування та експлуатації складних інформаційних систем: зб. наук, праць. - Житомир: ЖВІ НАУ. - 2009. - Вип. 2. - С. 175-182. 6. Сащук І.М. Методика визначення модуля вектора лінійної швидкості джерела радіовипромінювання пасивною системою радіомоніторингу / І.М. Сащук, Р.М. Жовноватюк, С.І. Болобан // Вісник ЖДТУ. - 2011. - № 1 (56). - С. 72-74. 7. Створення державної інтегрованої інформаційної системи забезпечення управління рухомими об'єктами (зв'язок, навігація, спостереження) України - виклик XXI століття / В.В. Корнієнко, М.Ф. Бондаренко, В.Т. Гандабура, Я.С. Яцків // Наука та інновації. - 2007. - Т. 3. № 1. С. 4-32. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб визначення параметрів руху повітряного джерела радіовипромінювання, який відрізняється тим, що в процесі польоту об'єкта одним пасивним радіотехнічним засобом вимірюються пеленги та, за характеристиками, параметрами сигналів випромінювання бортової радіолокаційної апаратури і тактико-технічними характеристиками існуючих повітряних об'єктів, визначається тип літака, за результатами робиться висновок про відповідність параметрів його руху встановленим маршрутам, потенційну небезпеку, яку він становить. 3 UA 107381 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: повітряного, руху, спосіб, джерела, параметрів, визначення, радіовипромінювання
Код посилання
<a href="https://ua.patents.su/6-107381-sposib-viznachennya-parametriv-rukhu-povitryanogo-dzherela-radioviprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів руху повітряного джерела радіовипромінювання</a>
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі
Номер патенту: 46388
Опубліковано: 15.05.2002
Автори: Березіна Світлана Іванівна, Худов Генадій Володимирович, Деденок Віктор Петрович, Голкін Дмитро Васильович, Бутенко Ольга Станіславівна
МПК: G01S 5/06
Мітки: джерела, вимірювальному, визначення, комплекси, радіовипромінювання, спосіб, однобазовому, координат
Формула / Реферат:
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі, що полягає в тому, що приймачі радіовипромінювання розміщають у двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від того самого джерела радіовипромінювання до приймачів і запам'ятовують час виміру, який відрізняється тим, що шляхом розміщення одного з приймачів випромінювання на літальному апараті національної...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Худов Генадій Володимирович, Бутенко Ольга Станіславівна, Деденок Віктор Петрович, Голкін Дмитро Васильович, Березіна Світлана Іванівна
МПК: G01S 5/06
Мітки: спосіб, радіовипромінювання, наземного, джерела, координат, визначення
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Система для визначення параметрів руху автотранспортних засобів при динамічних (кваліметричних) випробуваннях
Номер патенту: 51031
Опубліковано: 25.06.2010
Автори: Файст Валерій Львович, Подригало Михайло Абович, Коробко Андрій Іванович, Клец Дмитро Михайлович
МПК: G01P 3/00, G01P 15/00
Мітки: параметрів, руху, визначення, кваліметричних, випробуваннях, засобів, автотранспортних, система, динамічних
Формула / Реферат:
Система для визначення параметрів руху автотранспортних засобів (АТЗ) при динамічних (кваліметричних) випробуваннях, що складається з елементів вимірювання та пристроїв обробки та візуалізації інформації, яка відрізняється тим, що визначення параметрів руху здійснюють одночасно двома датчиками прискорень, причому датчики прискорень вимірюють прискорення АТЗ у повздовжній, поперечній та вертикальній площинах, інформацію про параметри руху АТЗ...
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці
Номер патенту: 63187
Опубліковано: 15.01.2004
Автори: Шульга Іван Федорович, Марчук Володимир Єфремович
МПК: F01D 1/00
Мітки: руху, повітряного, двигуна, спосіб, енергії, судна, використання, газоповітряного, потоку, стоянці
Формула / Реферат:
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці, при якому спалюють паливо, прогрівають і перевіряють якість роботи двигуна повітряного судна на стоянці, відхиляють і розсіюють газоповітряний потік за межами двигуна повітряного судна на стоянці, який відрізняється тим, що під час відхилювання та розсіювання газоповітряного потоку за межами двигуна повітряного судна на стоянці перетворюють енергію...
Спосіб визначення параметрів руху потягу на перегоні при централізованому розміщенні апаратури автоблокування
Номер патенту: 50743
Опубліковано: 25.06.2010
Автори: Рибалка Роман Володимирович, Романцев Іван Олегович, Гаврилюк Володимир Ілліч
МПК: B61L 25/00
Мітки: параметрів, потягу, централізованому, перегоні, спосіб, руху, розміщенні, автоблокування, апаратури, визначення
Формула / Реферат:
Спосіб визначення параметрів руху потягу на перегоні при централізованому розміщенні апаратури автоблокування, при якому вимірюють напругу на релейному та живлячому кінцях рейкового кола за допомогою відомого способу, після чого проводять аналіз несучих та бокових частот отриманої напруги у часовій області, швидкість руху потягу визначають по інтенсивності зміни кривої значення напруги проаналізованих частот, далі визначають координату...
Попередній патент: Спосіб спондилодезу
Наступний патент: Кутомір для колісних дисків
Випадковий патент: Пневматична сівалка