Пристрій для автоматичного відчіплення спускового парашута безпілотного літального апарата
Номер патенту: 108839
Опубліковано: 25.07.2016
Автори: Михацький Олексій Юрійович, Матійчик Михайло Петрович, Литвин Юрій Олександрович, Русаліна Людмила Володимірівна, Харченко Володимир Петрович, Гойхман Михайло Ісаакович, Петренко Микола Миколайович, Глущенко Максим Михайлович
Формула / Реферат
Пристрій автоматичного відчіплення парашута від БЛА, що оснащений парашутом, утримуючим замком, сервомеханізмом приводу замка, петлями, через які проведено стропи та датчиком удару, який через канал зв'язку пов'язаний з платою контролю спуску, що подає імпульс на сервомеханізм приводу замка, який відрізняється тим, що утримуючий замок розміщено в фюзеляжі, дві передні та дві задні внутрішні петлі, які розташовано попарно та симетрично з обох боків в фюзеляжі, через отвори яких проведено та нижніми робочими кінцями зачеплені за шток внутрішнього утримуючого замка дві задні та дві передні вантажні стропи парашута, причому верхні кінцівки вантажних строп закріплено до центральної підвісної стропи, а нижні робочі кінці вантажних строп зачеплені за шток внутрішнього утримуючого замка, а датчик контролю удару виконано ультразвуковим і який з'єднано з сервомеханізмом приводу замка за допомогою електрокабеля.
Текст
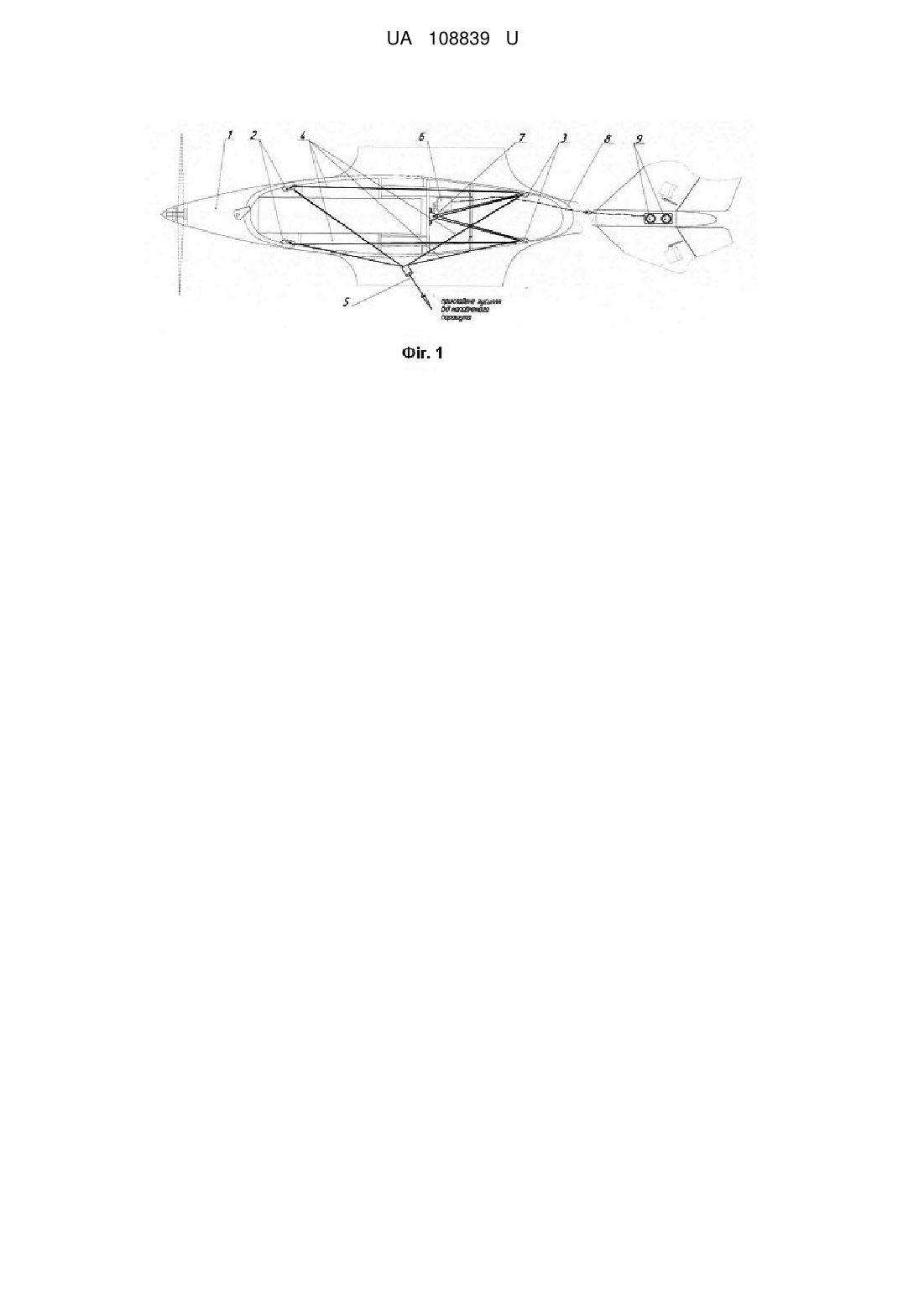
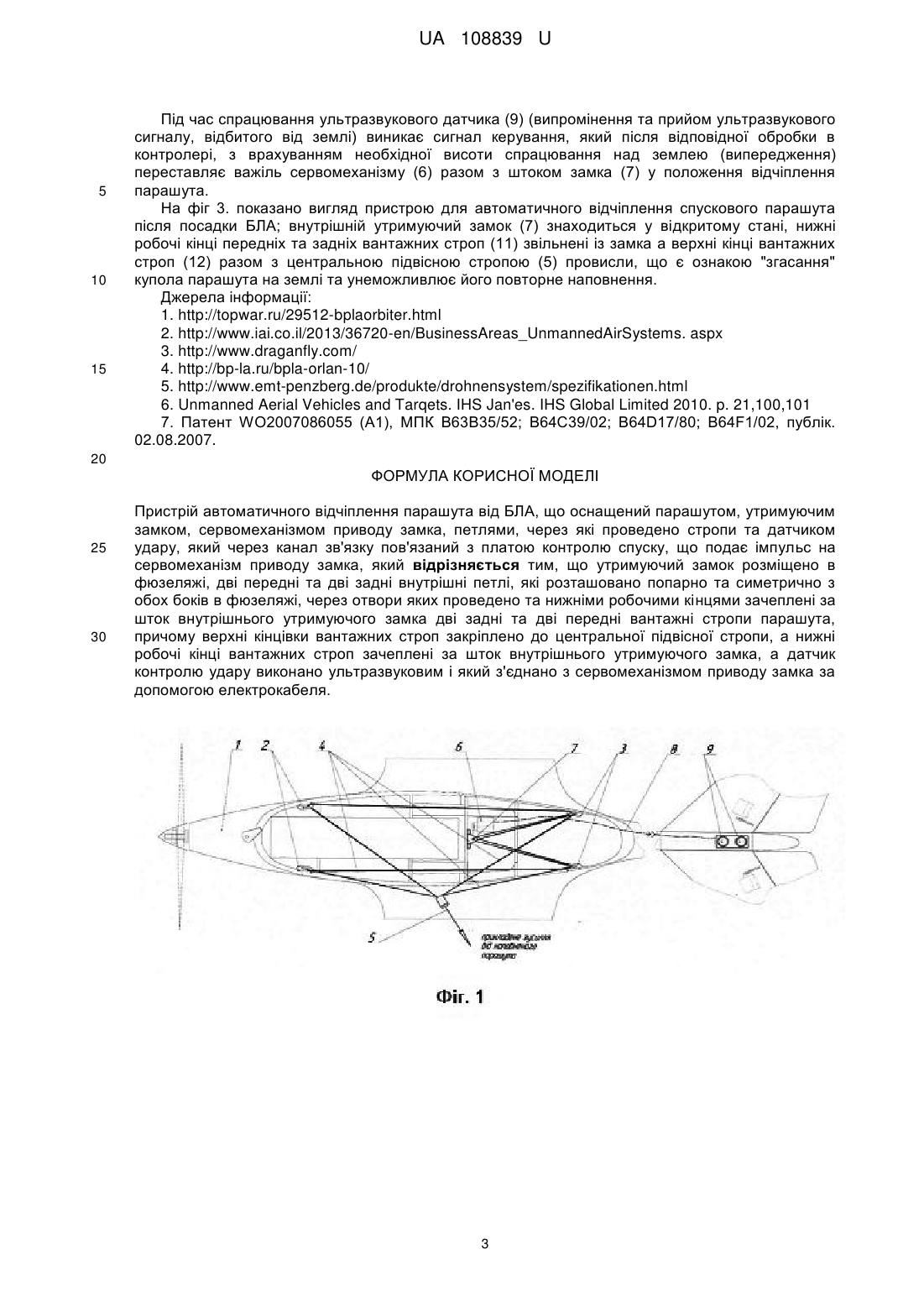
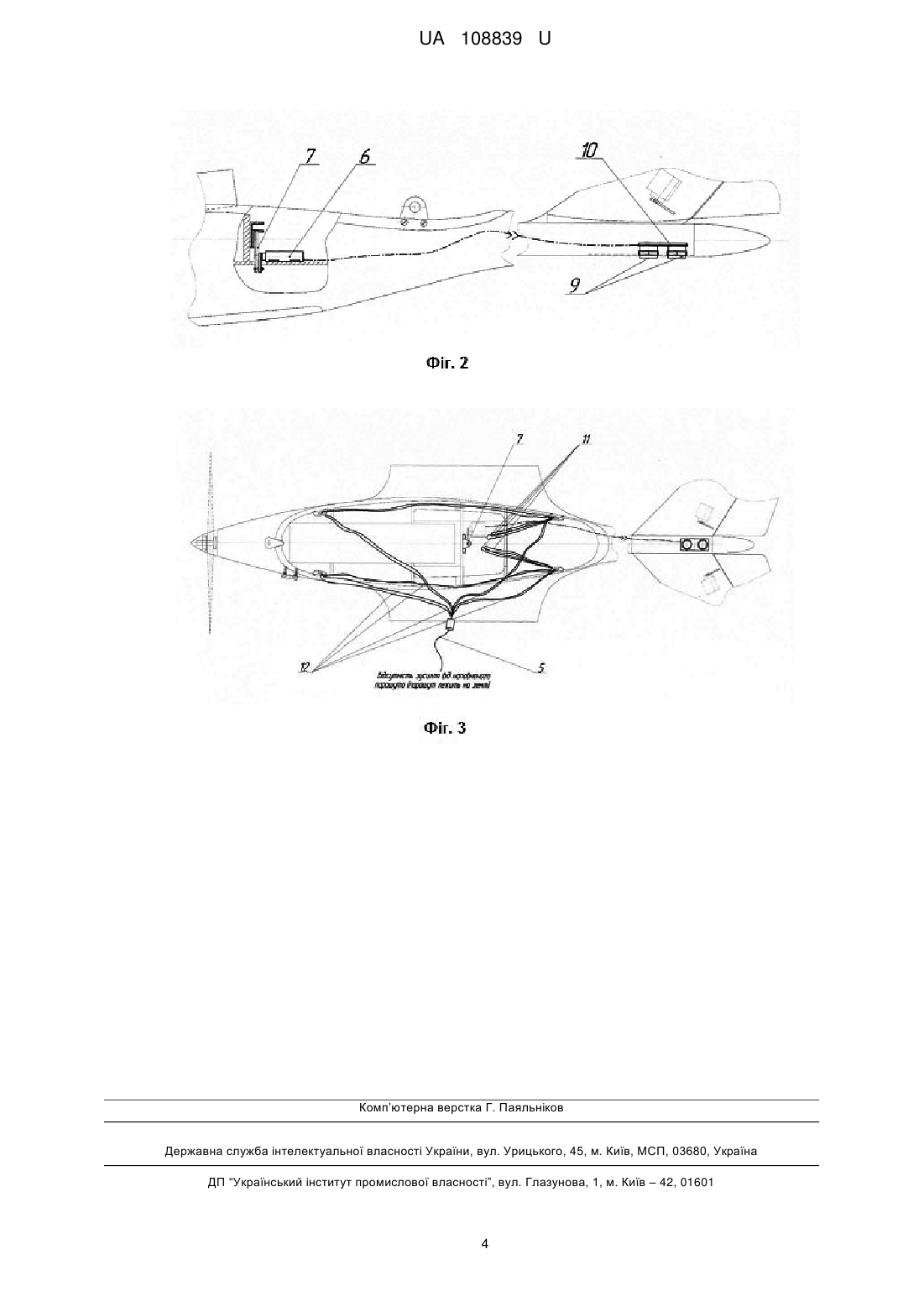
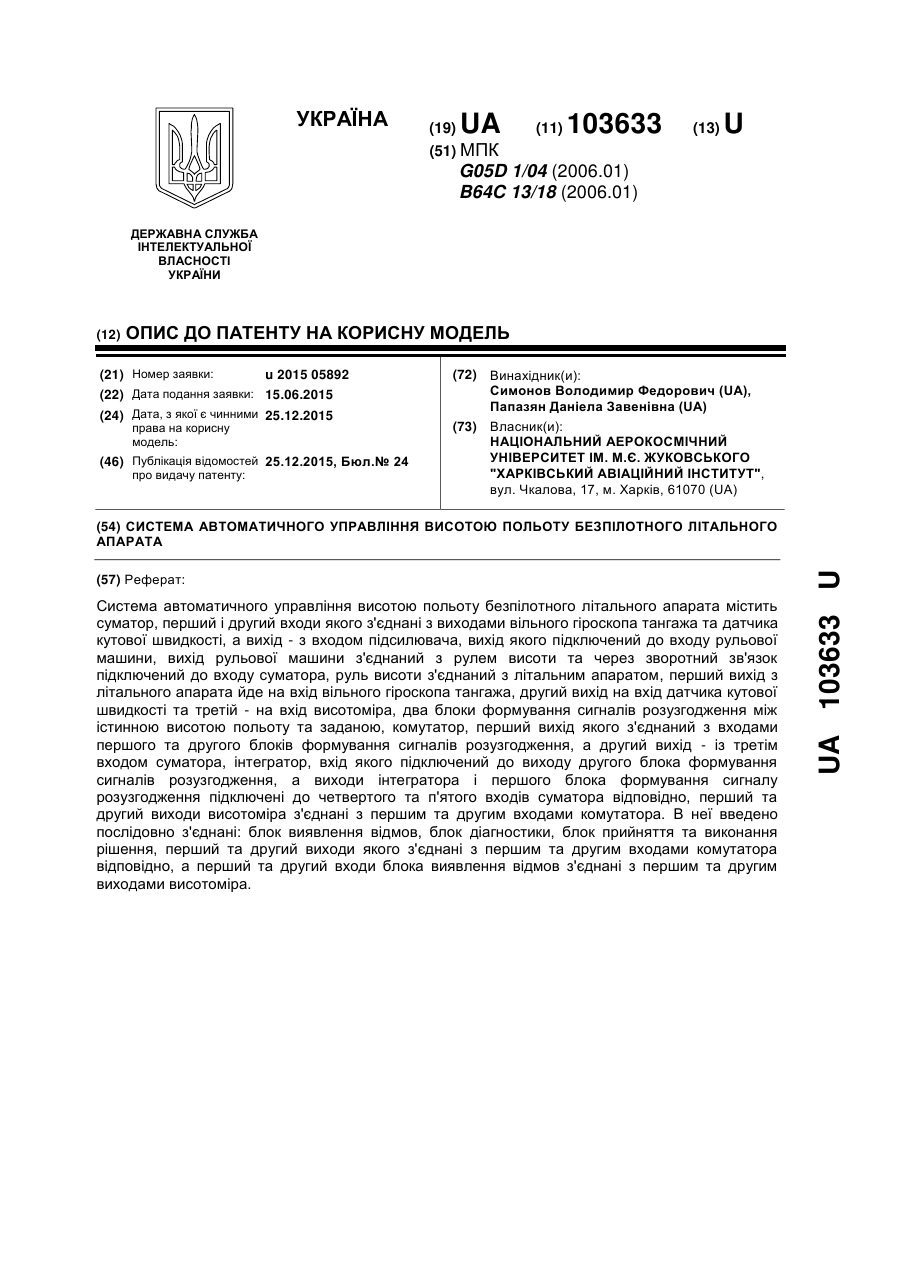
Реферат: Пристрій автоматичного відчіплення парашута від БЛА оснащений парашутом, утримуючим замком, сервомеханізмом приводу замка, петлями, через які проведено стропи та датчиком удару, який через канал зв'язку пов'язаний з платою контролю спуску, що подає імпульс на сервомеханізм приводу замка. Утримуючий замок розміщено в фюзеляжі, дві передні та дві задні внутрішні петлі, які розташовано попарно та симетрично з обох боків в фюзеляжі, через отвори яких проведено та нижніми робочими кінцями зачеплені за шток внутрішнього утримуючого замка дві задні та дві передні вантажні стропи парашута, причому верхні кінцівки вантажних строп закріплено до центральної підвісної стропи, а нижні робочі кінці вантажних строп зачеплені за шток внутрішнього утримуючого замка, а датчик контролю удару виконано ультразвуковим і який з'єднано з сервомеханізмом приводу замка за допомогою електрокабеля. UA 108839 U (12) UA 108839 U UA 108839 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до технічних засобів запобігання руйнуванню безпілотного літального апарату (БЛА) під час перетягування його по землі спусковим парашутом. Відомо, що підпарашутний спуск є основним способом виконання безпечної посадки крилатих безпілотних літальних апаратів, призначених для експлуатації в безаеродромних умовах. Як приклад, можна назвати БЛА Draganfly Tango (Канада) (http://www.draganfly.com/), "Орбітер" (Ізраїль) (http://topwar.ru/29512-bplaorbiter.html), "Орлан" (Росія) (http://bp-la.ru/bplaorlan-10/), "Луна" (Німеччина) (http://www.emtpenzberg.de/produkte/drohnensystem/spezifikationen.html) та інші Unmanned (Aerial Vehicles and Tarqets. IHS Jan'es. IHS Global Limited 2010 p. 21,100,101). Поряд з позитивними рисами підпарашутних систем, вони володіють цілим рядом недоліків, одним з основних з яких є руйнування БЛА власне самим спусковим парашутом під час перетягування БЛА по землі. Так при наявності приземного вітру з швидкістю 7-10 м/с, що майже вдвічі більше за швидкість підпарашутного спуску, купол парашута на землі не завжди "згасає" та дуже часто наповнюється. В залежності від площі, він може розвинути достатнє зусилля (в три-чотири рази більше за вагу БПС) для перетягування БЛА по землі та його значного руйнування аж до повного, тобто приведення БЛА у непридатний стан. Для запобігання руйнування БЛА від перетягування по землі застосовують пристрої ручного (дистанційного) та автоматичного відчіплення від БЛА наповненого на землі парашута. Пристрої ручного (дистанційного) керування відчіпленням є малопоширеними, внаслідок некоректного вмикання відчіплення через знесення БЛА горизонтальною складовою вітру і його значного відхилення від точки запланованої посадки; здебільшого вони застосовуються як резервні. Найбільшого поширення набули пристрої автоматичного відчіплення парашута від БЛА. Відомим є спосіб посадки літака, система та пристрій (БЛА виробництва ISRAEL AEROSPACE IND LTD) (http://www.iai.co.il/2013/36720en/BusinessAreas_UnmannedAirSystems.aspx). Пристрій автоматичного відчіплення парашута, який реалізовано в БЛА Bird Eye 400 складається з зовнішнього блоку управління стропами парашута (утримуючий замок, зовнішні стропопровідні петлі), сервомеханізму приводу замка, що керується платою контролю спуску, що пов'язаний каналом зв'язку з системою стеження дотику літака з поверхнею (датчик удару) (патент WO2007086055 (А1), МПК В63В35/52; В64С39/02; B64D17/80; B64F1/02, публік. 02.08.2007). Цей пристрій обрано як найближчий аналог. Спрацювання пристрою відчіплення парашута ініціюється датчиком удару, який фіксує удар фюзеляжу БЛА об землю. При цьому з плати контролю спуску подається відповідний імпульс на сервомеханізм і той у свою чергу відкриває зовнішній утримуючий замок, відповідні вантажні стропи роз'єднуються з фюзеляжем і парашут звільняється від БЛА. Цим унеможливлюється повторне розкриття купола, оскільки на вантажних стропах відсутнє навантаження (механічний опір від БЛА, що знаходиться у нерухомому стані на землі). Суттєвим недоліком відомого пристрою є зовнішнє розташування вантажних строп на фюзеляжі БЛА, зовнішнє розташування замка відчіплення, а також відсутність випередження відкривання сервомеханізму приводу замка відчіплення. Зовнішнє розташування вантажних строп на фюзеляжі БЛА та замка приводить до потреби застосування зовнішніх стропопровідних петель що підвищує аеродинамічний опір, ускладнює конструкцію та відповідно ускладнює передполітний монтаж парашута. Відсутність випередження відкривання сервомеханізму приводу замка відчіплення приводить до часткового перетягування БЛА по землі а у випадку сильного вітру, тобто присутності його значної горизонтальної складової, до його перевертання та пошкодження БЛА. Датчик удару може не спрацювати, якщо наземні умови (трава, м'який ґрунт, тощо) призведуть до плавного гальмування БЛА на останніх сантиметрах перед торканням. В основу корисної моделі поставлено задачу удосконалити пристрій автоматичного відчіплення парашута від БЛА шляхом спрощення його конструкції, зниження аеродинамічного опору та випередження моменту безпосереднього відчіплення вантажних строп від замка, що дасть змогу підвищити ефективність експлуатації БЛА в безаеродромних умовах. Поставлена задача вирішується тим, що пристрій автоматичного відчіплення парашута від БЛА, що оснащений парашутом, утримуючим замком, сервомеханізмом приводу замка, петлями, через які проведено стропи та датчиком удару, який через канал зв'язку пов'язаний з платою контролю спуску, що подає імпульс на сервомеханізм приводу замка має утримуючий замок розміщують в фюзеляжі, дві передні та дві задні внутрішні петлі, які розташовано співвісно та паралельно з обох боків в фюзеляжі, через отвори яких проведено та нижніми робочими кінцями зачеплене за шток внутрішнього утримуючого замка дві задні та дві передні 1 UA 108839 U 5 10 15 20 25 30 35 40 45 50 55 вантажні стропи парашута, причому верхні кінцівки вантажних строп закріплено до центральної підвісної стропи, а нижні робочі кінці вантажних строп зачеплені за шток внутрішнього утримуючого замка та датчик контролю удару виконано ультразвуковим і який з'єднано з сервомеханізмом приводу замка за допомогою електрокабеля. Використання внутрішнього утримуючого замка і внутрішнє розташування вантажних строп дозволяє знизити аеродинамічний опір БЛА в польоті за рахунок відсутності виступаючих елементів пристрою над аеродинамічно "чистою" поверхнею фюзеляжу. Крім того, внутрішнє розташування вантажних строп спрощує стропопроведення за рахунок вилучення зовнішніх стропопровідних петель та відповідно спрощує передполітний монтаж парашута. Використання ультразвукового датчика для ініціювання спрацювання сервомеханізму приводу замка дозволяє вимірювати та задавати безпосередню висоту спрацювання сервомеханізму приводу замка, що забезпечує відкриття замка з випередженням перед ударом. Відповідно на момент контакту з землею БЛА гарантовано від'єднується від вантажних строп парашута, що унеможливлює його часткове перетягування по землі або перевертання та пошкодження у випадку сильного вітру. Суть корисної моделі пояснюється кресленнями, на яких: фіг. 1 зображений пристрій для автоматичного відчіплення спускового парашута безпілотного літального апарата, встановлений у фюзеляж БЛА, який знаходиться у стані випущеного парашута та закритого внутрішнього утримуючого замка; фіг. 2 зображений вигляд ультразвукового датчика, встановленого в БЛА; фіг. 3 зображений пристрій для автоматичного відчіплення спускового парашута безпілотного літального апарата, встановлений у фюзеляж БЛА, який знаходиться у стані випущеного парашута та відкритого внутрішнього утримуючого замка (відчеплення парашута). Елементи корисної моделі позначені наступними цифровими позиціями: 1 - фюзеляж БЛА 2 - передня внутрішня петля, через отвір якої проводять передню вантажну стропу парашута 3 - задня внутрішня петля, через отвір якої проводять задню та передню вантажну стропу парашута 4 - вантажні стропи парашута 5 - центральна підвісна стропа парашута 6 - привід сервомеханізму 7 - шток внутрішнього утримуючого замка 8 - електрокабель 9 - ультразвуковий датчик 10 - плата контролю спуску 11 - нижні робочі кінці передніх та задніх вантажних строп 12 - верхні кінці вантажних строп Пристрій автоматичного відчіплення парашута від БЛА, що оснащений парашутом, утримуючим замком, сервомеханізмом приводу замка, петлями, через які проведено стропи та датчиком удару, який через канал зв'язку пов'язаний з платою контролю спуску, що подає імпульс на сервомеханізм приводу замка, що виконано таким, що утримуючий замок (7) розміщують в фюзеляжі (1), дві передні (2) та дві задні (3) внутрішні петлі, які розташовують попарно та симетрично з обох боків в фюзеляжі (1), через отвори яких проводять та нижніми робочими кінцями зачіплюють за шток внутрішнього утримуючого замка (7) дві задні та дві передні вантажні стропи парашута (4), причому верхні кінцівки вантажних строп (4) закріплюють до центральної підвісної стропи (5), а нижні робочі кінці вантажних строп (4) зачіплюють за шток внутрішнього утримуючого замка (7), а датчик контролю удару виконано ультразвуковим (9) і який з'єднують з сервомеханізмом приводу замка (6) за допомогою електрокабеля (8). До фюзеляжу БЛА (1) (фіг. 1) зсередини прикріплені внутрішні передні (2) та задні (3) петлі, через які проведено стропи і які є стропопровідними та одночасно стропоутримуючими. Через їх отвори проведені дві передні та дві задні вантажні стропи (4), які своїми нижніми робочими кінцями зачеплені за шток внутрішнього утримуючого замка (7). Верхні кінці передніх та задніх вантажних строп (4) нероз'ємно закріплені за центральну підвісну стропу (5). Для приведення в дію штока внутрішнього утримуючого замка (7) встановлено привід сервомеханізму (6). Привід сервомеханізму утримуючого замка (7) з'єднаний електрокабелем (8) з ультразвуковим датчиком (9). Ультразвуковий датчик (9) (фіг.2) встановлений разом з відповідним контролером на платі контролю спуску (10) у хвостовій частині БЛА. 2 UA 108839 U 5 10 15 Під час спрацювання ультразвукового датчика (9) (випромінення та прийом ультразвукового сигналу, відбитого від землі) виникає сигнал керування, який після відповідної обробки в контролері, з врахуванням необхідної висоти спрацювання над землею (випередження) переставляє важіль сервомеханізму (6) разом з штоком замка (7) у положення відчіплення парашута. На фіг 3. показано вигляд пристрою для автоматичного відчіплення спускового парашута після посадки БЛА; внутрішній утримуючий замок (7) знаходиться у відкритому стані, нижні робочі кінці передніх та задніх вантажних строп (11) звільнені із замка а верхні кінці вантажних строп (12) разом з центральною підвісною стропою (5) провисли, що є ознакою "згасання" купола парашута на землі та унеможливлює його повторне наповнення. Джерела інформації: 1. http://topwar.ru/29512-bplaorbiter.html 2. http://www.iai.co.il/2013/36720-en/BusinessAreas_UnmannedAirSystems. aspx 3. http://www.draganfly.com/ 4. http://bp-la.ru/bpla-orlan-10/ 5. http://www.emt-penzberg.de/produkte/drohnensystem/spezifikationen.html 6. Unmanned Aerial Vehicles and Tarqets. IHS Jan'es. IHS Global Limited 2010. p. 21,100,101 7. Патент WO2007086055 (A1), МПК В63В35/52; B64C39/02; B64D17/80; B64F1/02, публік. 02.08.2007. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Пристрій автоматичного відчіплення парашута від БЛА, що оснащений парашутом, утримуючим замком, сервомеханізмом приводу замка, петлями, через які проведено стропи та датчиком удару, який через канал зв'язку пов'язаний з платою контролю спуску, що подає імпульс на сервомеханізм приводу замка, який відрізняється тим, що утримуючий замок розміщено в фюзеляжі, дві передні та дві задні внутрішні петлі, які розташовано попарно та симетрично з обох боків в фюзеляжі, через отвори яких проведено та нижніми робочими кінцями зачеплені за шток внутрішнього утримуючого замка дві задні та дві передні вантажні стропи парашута, причому верхні кінцівки вантажних строп закріплено до центральної підвісної стропи, а нижні робочі кінці вантажних строп зачеплені за шток внутрішнього утримуючого замка, а датчик контролю удару виконано ультразвуковим і який з'єднано з сервомеханізмом приводу замка за допомогою електрокабеля. 3 UA 108839 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64D 17/80, B64C 39/02
Мітки: безпілотного, парашута, відчіплення, спускового, апарата, автоматичного, літального, пристрій
Код посилання
<a href="https://ua.patents.su/6-108839-pristrijj-dlya-avtomatichnogo-vidchiplennya-spuskovogo-parashuta-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного відчіплення спускового парашута безпілотного літального апарата</a>
Система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 103633
Опубліковано: 25.12.2015
Автори: Симонов Володимир Федорович, Папазян Даніела Завенівна
МПК: B64C 13/18, G05D 1/04
Мітки: безпілотного, автоматичного, літального, система, висотою, управління, польоту, апарата
Формула / Реферат:
Система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший...
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Амеліна Ірина Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: кутової, пристрій, літального, стабілізації, безпілотного, апарата
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Пусковий пристрій для короткого примусового старту безпілотного літального апарата
Номер патенту: 103149
Опубліковано: 10.12.2015
Автор: Матійчик Михайло Петрович
МПК: B64F 1/06
Мітки: літального, апарата, безпілотного, старту, пусковий, пристрій, примусового, короткого
Формула / Реферат:
Пусковий пристрій для короткого примусового старту безпілотного літального апарата, що має дві напрямні, встановлені під кутом стартового тангажу БЛА, гумовий накопичувач-акумулятор, леєр-подовжувач, кілочки для розкріплення пускового пристрою, стартовий замок та стартовий гачок в межах бокової проекції БЛА, який відрізняється тим, що гумовий накопичувач-акумулятор через леєр-подовжувач на старті під'єднано до винесених вперед і вниз, поза...
Пристрій для посадки безпілотного літального апарата
Номер патенту: 53306
Опубліковано: 11.10.2010
Автори: Тупіцин Микола Федорович, Удовенко Олександр Опанасович, Синєглазов Віктор Михайлович
МПК: B64F 1/00, B64C 25/00
Мітки: пристрій, посадки, апарата, літального, безпілотного
Формула / Реферат:
1. Пристрій для посадки безпілотного літального апарата, що містить гальмівний крюк, який своїм вільним кінцем з крюком виконує захват пружного троса перших гальмівних воріт, який відрізняється тим, що висота розміщення троса перших воріт Н1 більше, ніж висота розміщення троса других воріт Н2, на величину, так, що
Посадочний пристрій для безпілотного літального апарата

Номер патенту: 53663
Опубліковано: 11.10.2010
Автори: Харченко Володимир Петрович, Священко Юрій Іванович, Корченюк Вячеслав Павлович
МПК: B64C 25/00, B64F 1/00
Мітки: літального, безпілотного, пристрій, посадочний, апарата
Формула / Реферат:
1. Посадочний пристрій для безпілотного літального апарата (БПЛА), що містить зачіп, зв'язаний із БПЛА, та встановлені на посадочній площадці трос та уловлювачі, який відрізняється тим, що на БПЛА розміщений фал, зчеплений одним кінцем з БПЛА, другим - із зачепом, що фіксується механізмом скиду на БПЛА, а на посадочній площадці на вертикальних штангах із розчалками паралельно встановлені передній та задній троси на одній висоті, рівній 3...4...
Попередній патент: Спосіб медичної реабілітації дисциркуляторної енцефалопатії
Наступний патент: Пристрій для лікування і профілактики захворювань хребта та опорно-рухового апарату “arch-kiparis”
Випадковий патент: Машина для формування пряників з начинкою