Система автоматичного управління висотою польоту безпілотного літального апарата
Номер патенту: 103633
Опубліковано: 25.12.2015
Автори: Папазян Даніела Завенівна, Симонов Володимир Федорович
Формула / Реферат
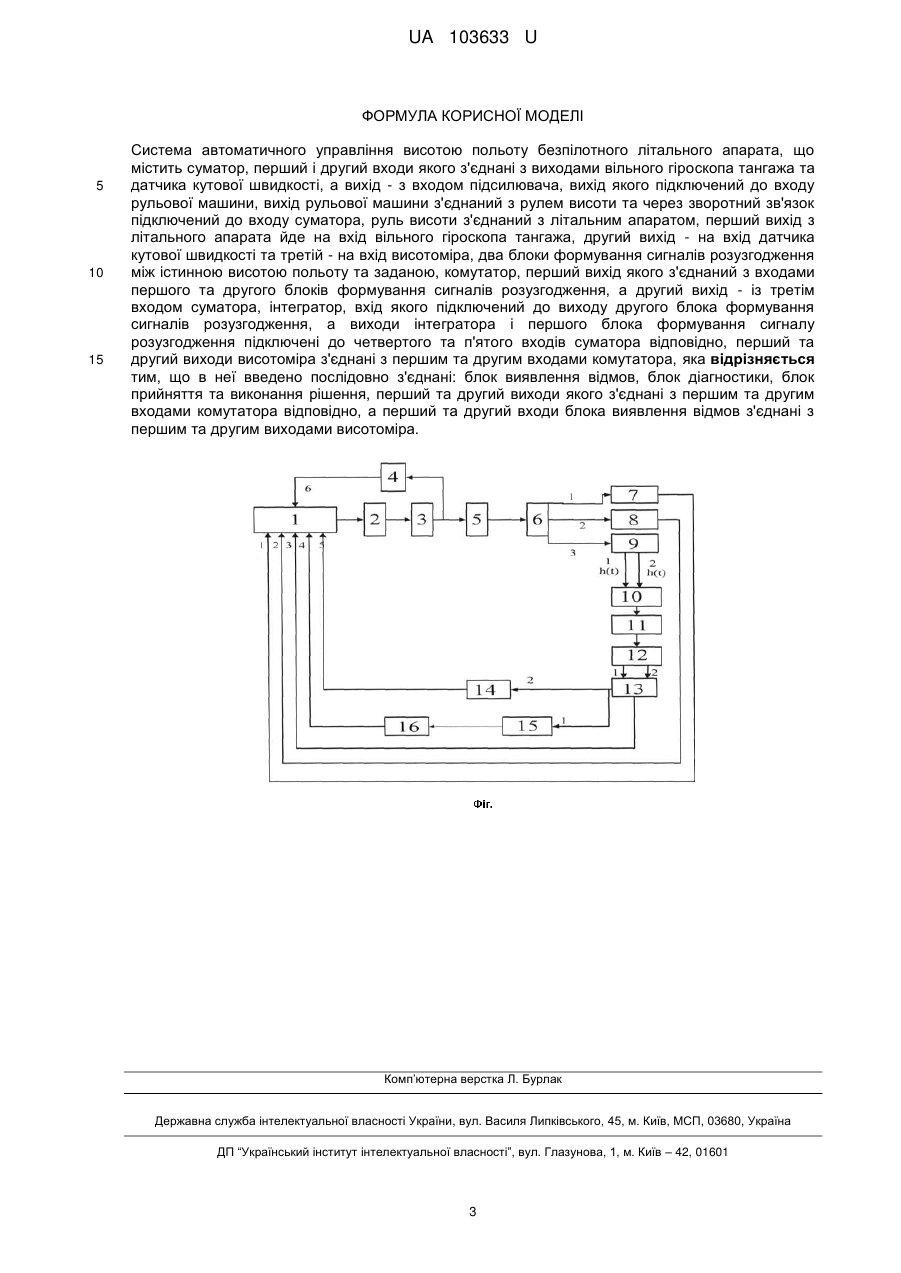
Система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа, другий вихід - на вхід датчика кутової швидкості та третій - на вхід висотоміра, два блоки формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор, перший вихід якого з'єднаний з входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора, інтегратор, вхід якого підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора відповідно, перший та другий виходи висотоміра з'єднані з першим та другим входами комутатора, яка відрізняється тим, що в неї введено послідовно з'єднані: блок виявлення відмов, блок діагностики, блок прийняття та виконання рішення, перший та другий виходи якого з'єднані з першим та другим входами комутатора відповідно, а перший та другий входи блока виявлення відмов з'єднані з першим та другим виходами висотоміра.
Текст
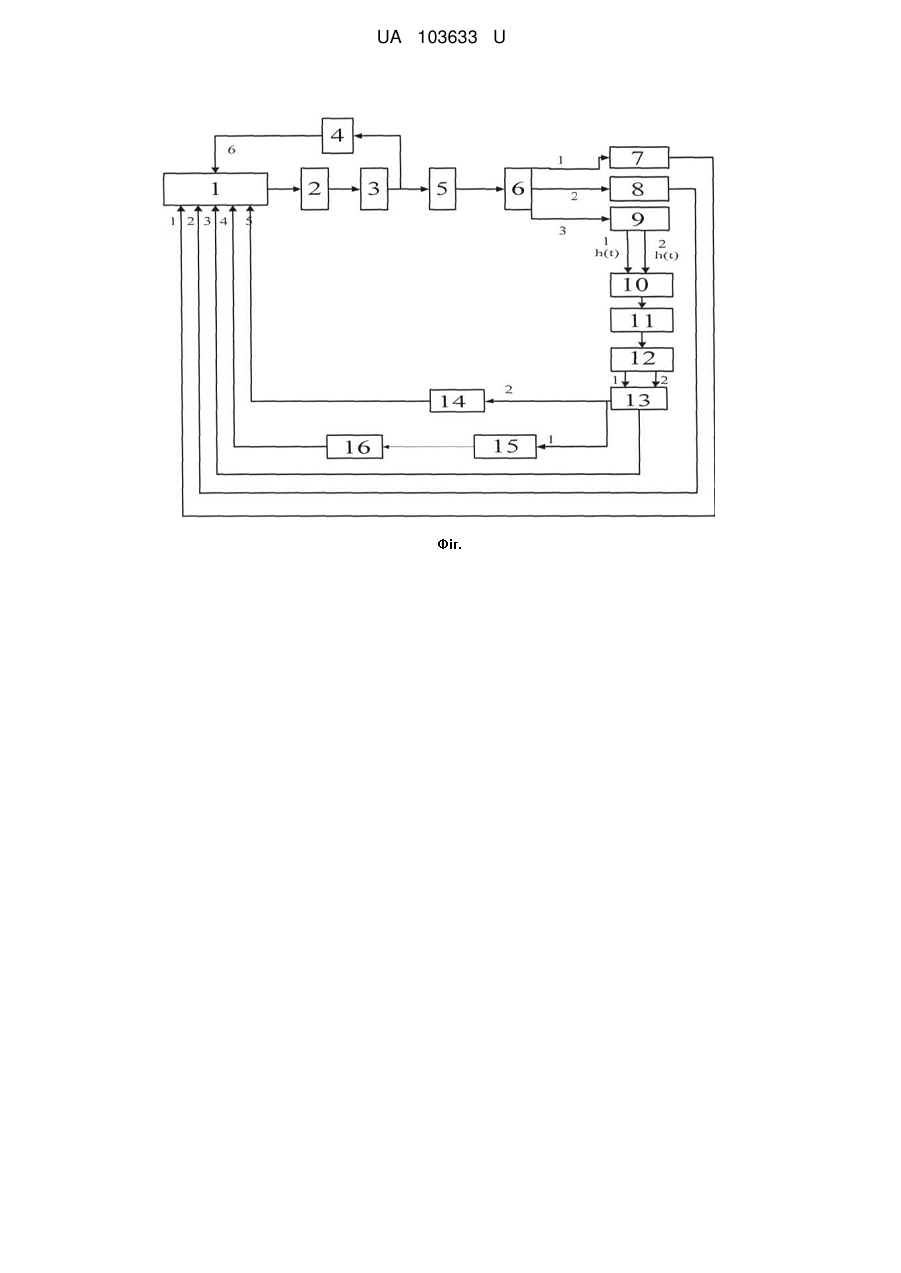
Реферат: Система автоматичного управління висотою польоту безпілотного літального апарата містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа, другий вихід на вхід датчика кутової швидкості та третій - на вхід висотоміра, два блоки формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор, перший вихід якого з'єднаний з входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора, інтегратор, вхід якого підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора відповідно, перший та другий виходи висотоміра з'єднані з першим та другим входами комутатора. В неї введено послідовно з'єднані: блок виявлення відмов, блок діагностики, блок прийняття та виконання рішення, перший та другий виходи якого з'єднані з першим та другим входами комутатора відповідно, а перший та другий входи блока виявлення відмов з'єднані з першим та другим виходами висотоміра. UA 103633 U (54) СИСТЕМА АВТОМАТИЧНОГО УПРАВЛІННЯ ВИСОТОЮ ПОЛЬОТУ БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 103633 U UA 103633 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки. Відома система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, підсилювач, рульову машину, зворотний зв'язок, руль висоти, літальний апарат, швидкісний гіроскоп, гіровертикаль та висотомір. Також виходи швидкісного гіроскопа, гіровертикалі, висотоміра та вихід блока зворотного зв'язка з'єднані з входами суматора, вихід суматора з'єднаний з входом підсилювача, вихід якого підключений до входу рульової машини. Вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, виходи літального апарата йдуть на входи швидкісного гіроскопа, гіровертикалі та висотоміра (Боднер В.А., Козлов М.С. Стабилизация летательных аппаратов и автопилоты. - Оборонгиз, М., 1961, С. 92). Недоліком даної системи автоматичного управління є велике перерегулювання в перехідних процесах та низька надійність у випадку відмови висотоміра. Технічним результатом є забезпечення стабілізації висоти польоту літального апарата без перерегулювання після швидкої зміни висоти польоту. Найбільш близьким до даного винаходу, прийнятим за прототип, є система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа, другий вихід на вхід датчика кутової швидкості та третій - на вхід висотоміра, два блока формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор перший вихід якого з'єднаний з входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора, інтегратор, вхід якого підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора відповідно, перший та другий виходи висотоміра з'єднані з першим та другим входами комутатора, (патент RU 2290346 С1, опубл. 27.12.2006). Недоліком даної системи є низька працездатність у випадку відмови висотоміра. Види відмов: зсув характеристики відносно осі абсцис або ординат, зменшення коефіцієнту, обривання проводів висотоміра. Задачею корисної моделі є підвищення працездатності системи автоматичного управління висотою польоту безпілотного літального апарата. Поставлена задача вирішується тим, що в систему автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа, другий вихід - на вхід датчика кутової швидкості та третій - на вхід висотоміра, два блоки формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор, перший вихід якого з'єднаний з входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора, інтегратор, вхід якого підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора відповідно, перший та другий виходи висотоміра з'єднані з першим та другим входами комутатора, відповідно до корисної моделі введені послідовно з'єднані блоки блок виявлення відмов, блок діагностики, блок прийняття та виконання рішення, перший та другий входи блока виявлення відмов з'єднані з виходами висотоміра, перший вихід - висота, другий - швидкість зміни висоти, а вихід з'єднаний з блоком діагностики, вихід блока діагностики з'єднаний з входом блока прийняття та виконання рішення, виходи блока прийняття та виконання рішення з'єднані з першим та другим входами комутатора. На кресленні зображена функціональна схема корисної моделі системи автоматичного управління висотою польоту безпілотного літального апарата. Запропонована система автоматичного управління висотою польоту безпілотного літального апарата містить послідовно з'єднані суматор 1, підсилювач 2, рульову машину 3, зворотний зв'язок 4, руль висоти 5 літального апарата 6, вільний гіроскоп тангажа 7, датчик кутової швидкості 8 та висотомір 9 з виходами за значеннями висоти та швидкості її зміни, виходи вільного гіроскопа тангажа 7 і датчика кутової швидкості 8 з'єднані з першим і другим 1 UA 103633 U 5 10 15 20 25 30 входами відповідно, вихід суматора 1 з'єднаний з входом підсилювача 2, вихід якого підключений до входу рульової машини 3, вихід рульової машини 3 з'єднаний з рулем висоти 5 та через зворотний зв'язок 4 підключений до першого входу суматора, руль висоти 5 з'єднаний з літальним апаратом 6, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа 7, другий вихід з літального апарата йде на вхід датчика кутової швидкості 8 та третій на вхід висотоміра 9, система має у собі два блоки формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор 13 і інтегратор 16, комутатор 13 має два входи, перший із котрих з'єднаний з першим виходом висотоміра 9, другий вхід підключений до другого виходу висотоміра 9 і два виходи, причому перший вихід комутатора 13 з'єднаний з першими входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора 1, вхід інтегратора 16 підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора 16 і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора 1 відповідно. Система автоматичного управління висотою польоту безпілотного літального апарата працює таким чином. При досягненні у процесі зниження висоти польоту Н < Нс комутатор 13 запускає у роботу перший та другий блоки формування сигналів розузгодження 14, 15, запускає інтегратор 16 і підключає свій вихід по значенню швидкості зміни висоти польоту до третього, четвертого та п'ятого входів суматора 1; система управління переходить до режиму стабілізації висоти польоту. Кут тангажа та кутова швидкість виміряні вільним гіроскопом тангажу 7 і датчиком кутової швидкості 8, надходять на перший та другий входи суматора 1. Швидкість зміни польоту, яку міряє висотомір 9, надходить на три послідовно з'єднані блоки, на вхід блока виявлення відмов 10, зі входу блока виявлення відмов 10 сигнал йде на вхід блока діагностики 11, зі входу блока діагностики 11 йде до блока прийняття та виконання рішення 12. Поточна висота польоту, яку міряє висотомір 9, після виходу з блока прийняття та виконання рішення 12 через комутатор 13 йде у перший та другий блоки формування сигналів розузгодження 14, 15, на виході яких відповідно формуються сигнали розузгодження: Hc H Hc Hm H Hm . Останній сигнал проходить через інтегратор 16, на виході якого формується сигнал, де tc час початку роботи стабілізації. t t c Hm dt , t tc 35 Hm dt і Hc надходять на входи суматора 1, на виході якого формується Сигнали керуючий сигнал: ѓ ѓc iB B kHHc kHH k i H Hm dt 40 45 50 , k де iB , B , kH , k H , i H - передаточні числа. Якщо нема інформації по висоті, то блок прийняття та виконання рішення 12 інтегрує швидкість по висоті, а якщо нема сигналу по швидкості висоти, то береться похідна сигналу по висоті. Сигнал з блока виявлення відмов 10 надходить на вхід блока діагностики 11, де відбувається діагностика отриманих даних. Сигнал з блока діагностики 11 надходить на вхід блока прийняття та виконання рішення 12. Якщо відбулася відмова хоча б одного з датчиків, то блок прийняття та виконання рішення 12 приймає рішення про метод парирування відмов. Якщо відбувся зсув статичної характеристики відносно осі абсцис або ординат, чи відбулося зменшення коефіцієнту одного з датчиків, блок прийняття та виконання рішення 12 приймає рішення та виконує відновлення статичної характеристики датчика. Сигнали з блока прийняття та виконання рішення 12 надходять на входи комутатора 13. Таким чином, поставлена задача підвищення працездатності системи автоматичного управління висотою польоту безпілотного літального апарата повністю вирішується за допомогою наявності в системі блока виявлення відмов, блока діагностики і блока прийняття та виконання рішення, які вирішують задачі парирування відмов висотоміра. 2 UA 103633 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Система автоматичного управління висотою польоту безпілотного літального апарата, що містить суматор, перший і другий входи якого з'єднані з виходами вільного гіроскопа тангажа та датчика кутової швидкості, а вихід - з входом підсилювача, вихід якого підключений до входу рульової машини, вихід рульової машини з'єднаний з рулем висоти та через зворотний зв'язок підключений до входу суматора, руль висоти з'єднаний з літальним апаратом, перший вихід з літального апарата йде на вхід вільного гіроскопа тангажа, другий вихід - на вхід датчика кутової швидкості та третій - на вхід висотоміра, два блоки формування сигналів розузгодження між істинною висотою польоту та заданою, комутатор, перший вихід якого з'єднаний з входами першого та другого блоків формування сигналів розузгодження, а другий вихід - із третім входом суматора, інтегратор, вхід якого підключений до виходу другого блока формування сигналів розузгодження, а виходи інтегратора і першого блока формування сигналу розузгодження підключені до четвертого та п'ятого входів суматора відповідно, перший та другий виходи висотоміра з'єднані з першим та другим входами комутатора, яка відрізняється тим, що в неї введено послідовно з'єднані: блок виявлення відмов, блок діагностики, блок прийняття та виконання рішення, перший та другий виходи якого з'єднані з першим та другим входами комутатора відповідно, а перший та другий входи блока виявлення відмов з'єднані з першим та другим виходами висотоміра. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/04, B64C 13/18
Мітки: літального, висотою, польоту, автоматичного, безпілотного, апарата, управління, система
Код посилання
<a href="https://ua.patents.su/5-103633-sistema-avtomatichnogo-upravlinnya-visotoyu-polotu-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного управління висотою польоту безпілотного літального апарата</a>
Пристрій для автоматичного управління висотою польоту

Номер патенту: 101040
Опубліковано: 25.08.2015
Автор: Антонов Володимир Костянтинович
МПК: G08G 5/00
Мітки: пристрій, автоматичного, висотою, польоту, управління
Формула / Реферат:
Пристрій для автоматичного управління висотою польоту, що містить задатчик заданої висоти, датчик поточної висоти, блок їх порівняння, і блок формування керуючого впливу, який відрізняється тим, що в контур формування керуючого впливу додатково введено блок обмеження значення відхилення поточної висоти від заданої.
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Карпова Тетяна Володимирівна
МПК: B64C 13/18, G05D 1/08
Мітки: управління, кутом, апарата, літального, система, тангажа
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: система, апарата, літального, кутової, відмовостійка, стабілізації, безпілотного
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Амелін Сергій Вікторович, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, стабілізації, безпілотного, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування
Номер патенту: 93824
Опубліковано: 10.10.2014
Автори: Шмаров Валерій Миколайович, Нікулін Олександр Федорович, Чумаченко Сергій Миколайович, Лисенко Олександр Іванович, Данилюк Сергій Леонідович, Семенченко Андрій Іванович, Новіков Валерій Іванович, Валуйський Станіслав Вікторович, Романченко Ігор Сергійович, Тачиніна Олена Миколаївна
МПК: G01C 21/34, B64C 17/00, B64C 19/00
Мітки: стабілізації, спосіб, баражування, літального, безпілотного, траєкторіях, апарата, польоту
Формула / Реферат:
Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування, який включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену,...
Попередній патент: Спосіб комплексного лікування хворих на тривожну депресію
Наступний патент: Адаптивна система управління швидкістю обертання радіолокаційної антени
Випадковий патент: Вологозахищений світильник на основі над'яскравих світлодіодних джерел світла