Привод конвеєра, що коливається

Формула / Реферат
Привод конвеєра, що коливається, який містить корпус, зубчастий механізм і виконавчий механізм для перетворення обертального руху його ведучої ланки у зворотно-поступальний рух риштака, який відрізняється тим, що ведуча ланка виконавчого механізму виконана у вигляді кулачка з роликовим коромислом, профіль якого окреслюється кривими, які забезпечують швидкість руху риштака у формі двох асиметричних синусоїд.
Текст
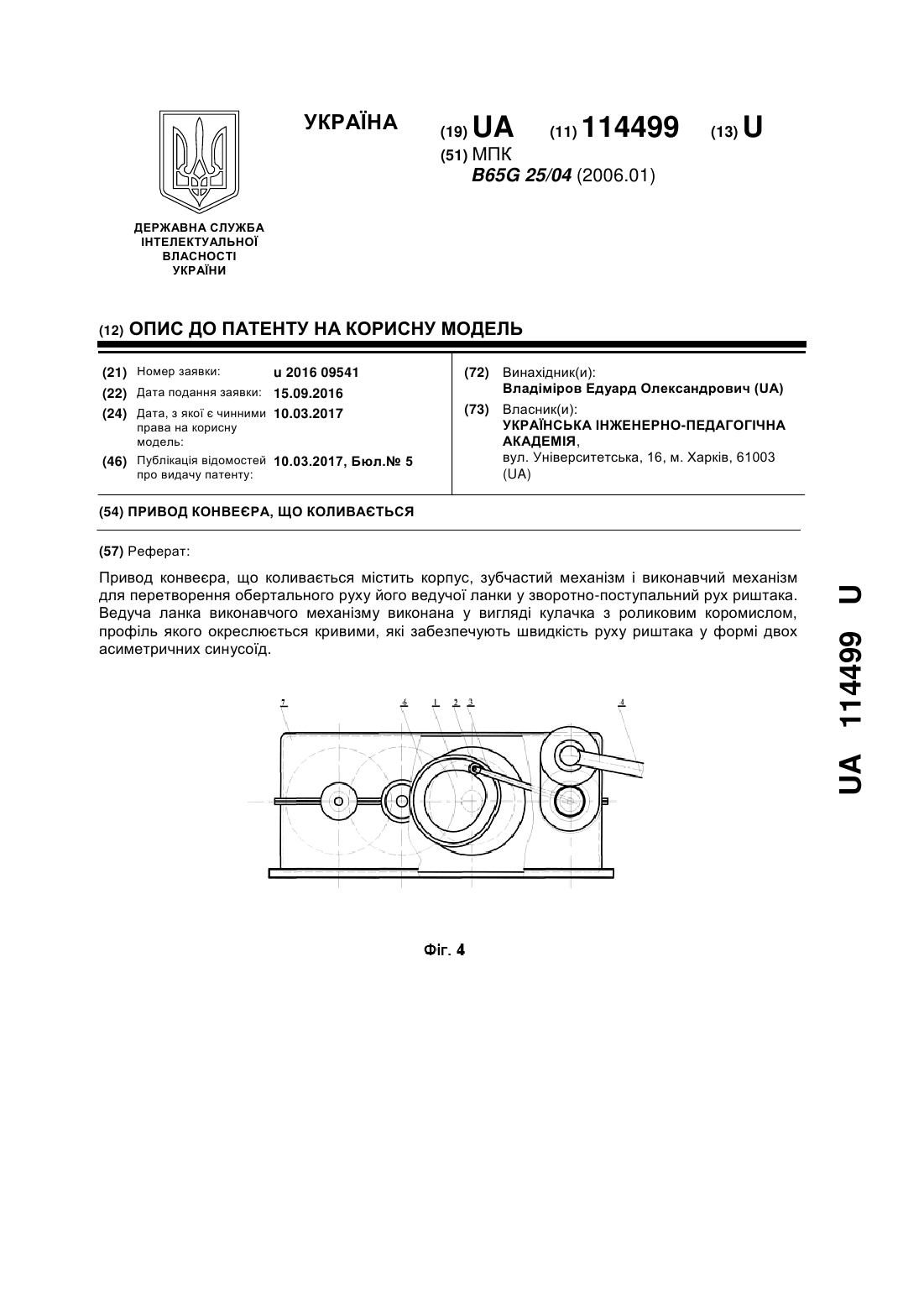
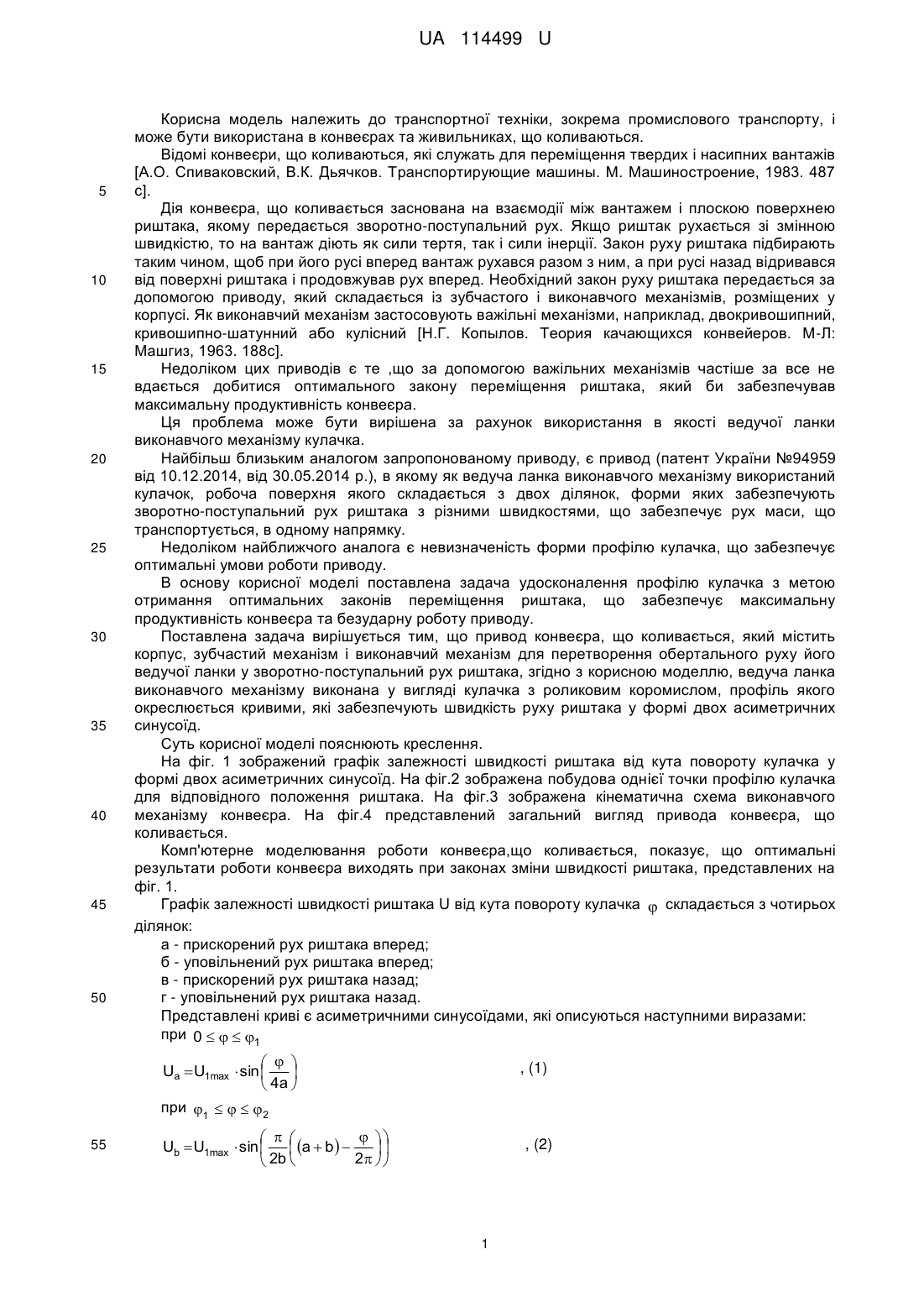
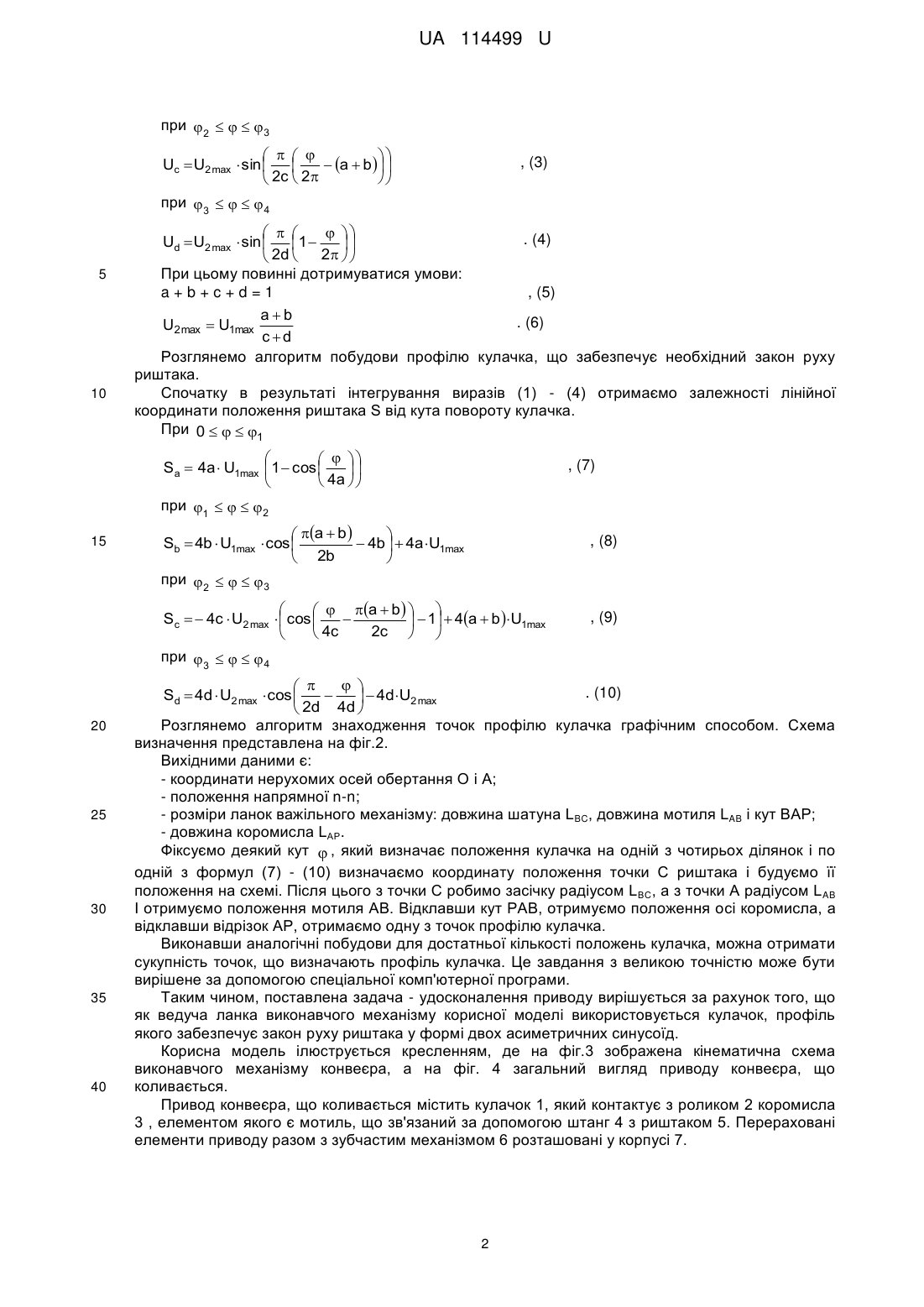
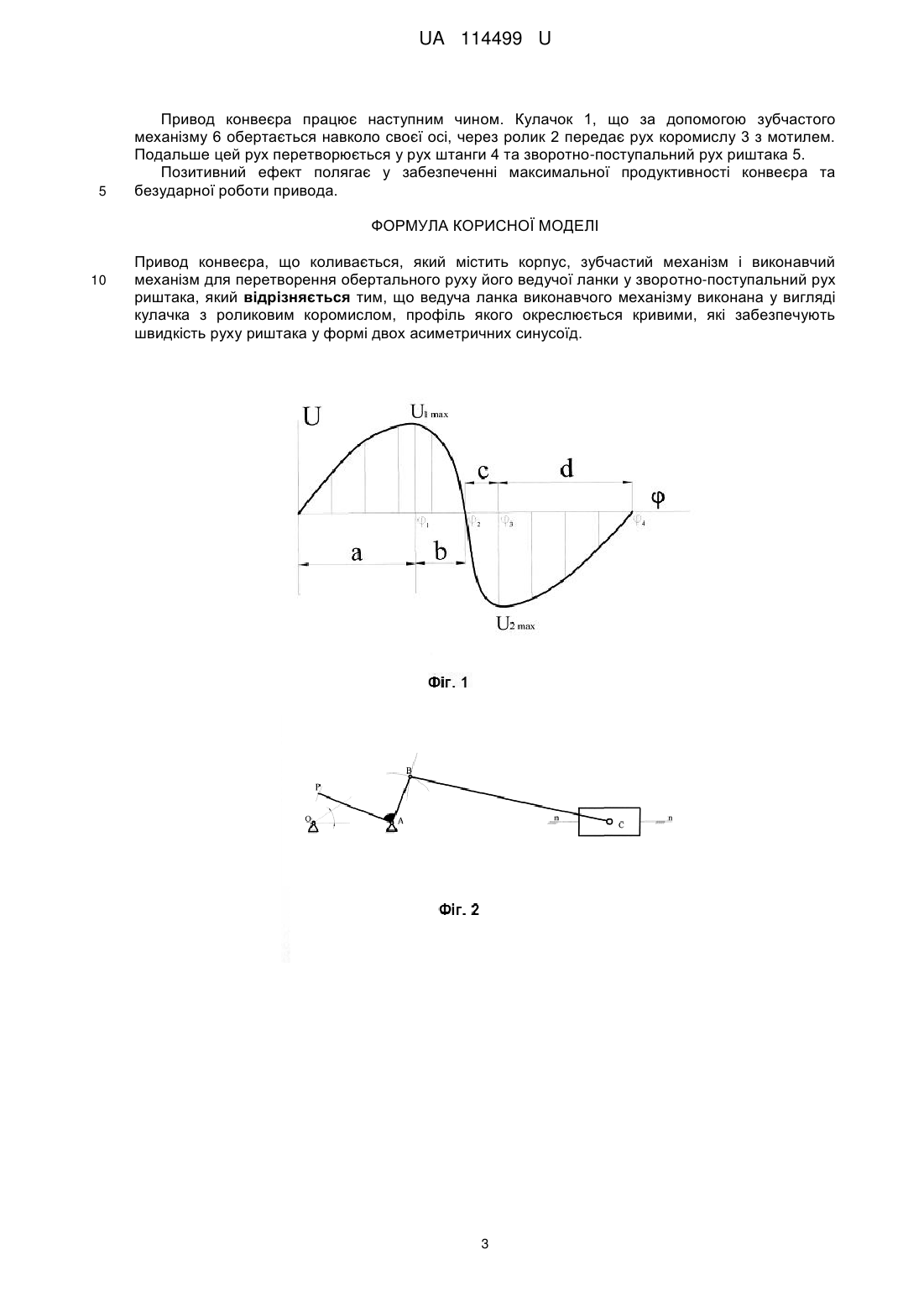
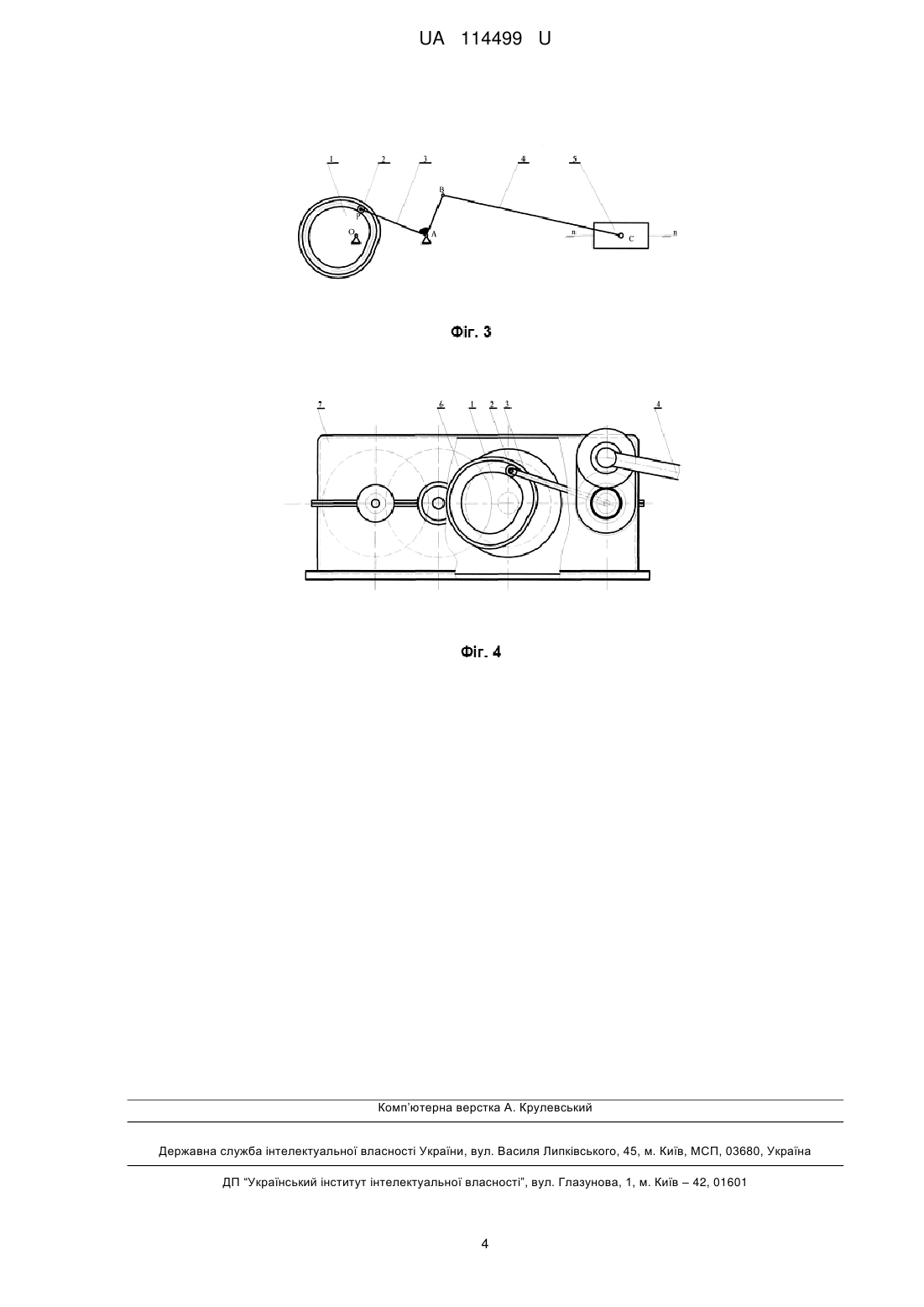
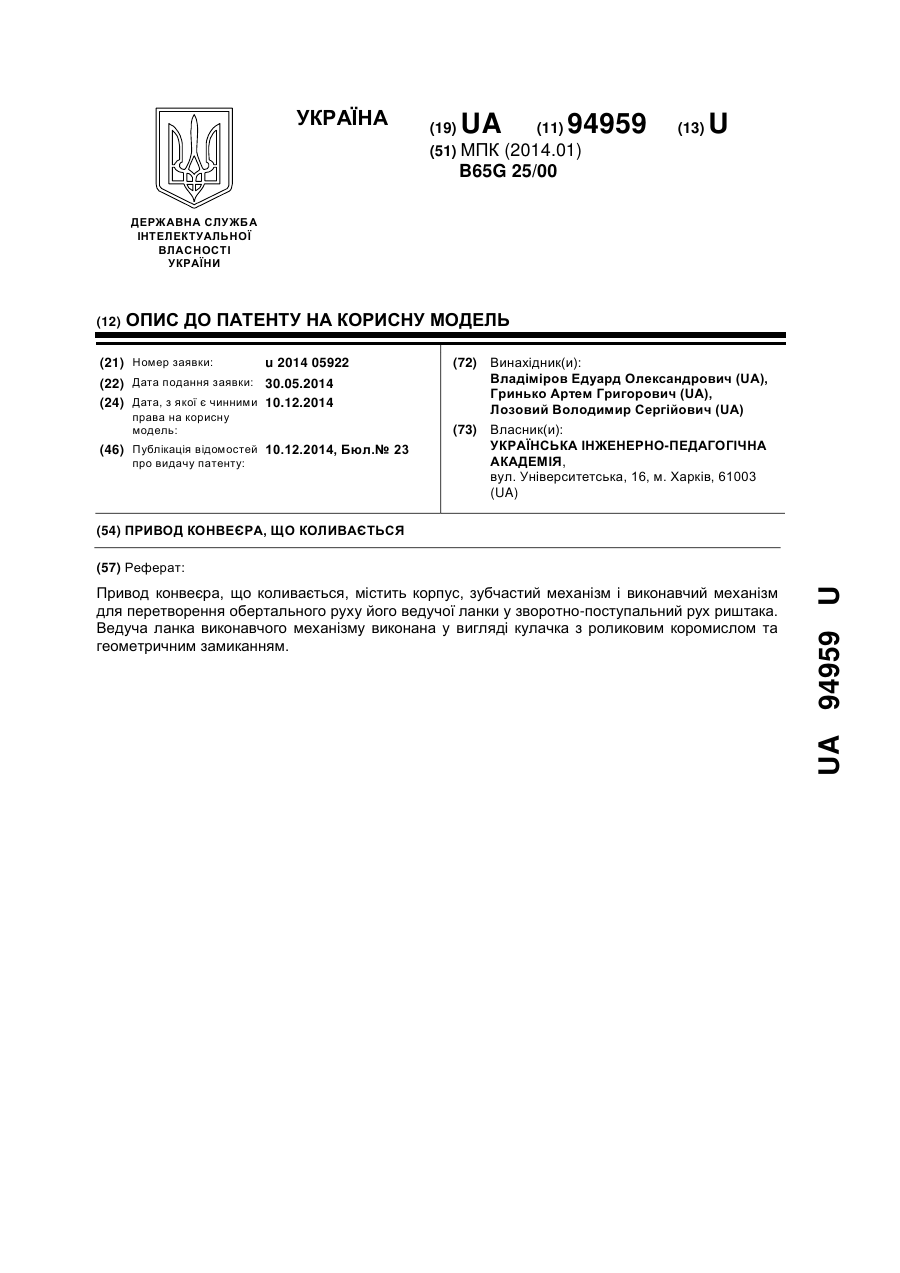
Реферат: UA 114499 U UA 114499 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до транспортної техніки, зокрема промислового транспорту, і може бути використана в конвеєрах та живильниках, що коливаються. Відомі конвеєри, що коливаються, які служать для переміщення твердих і насипних вантажів [А.О. Спиваковский, В.К. Дьячков. Транспортирующие машины. М. Машиностроение, 1983. 487 с]. Дія конвеєра, що коливається заснована на взаємодії між вантажем і плоскою поверхнею риштака, якому передається зворотно-поступальний рух. Якщо риштак рухається зі змінною швидкістю, то на вантаж діють як сили тертя, так і сили інерції. Закон руху риштака підбирають таким чином, щоб при його русі вперед вантаж рухався разом з ним, а при русі назад відривався від поверхні риштака і продовжував рух вперед. Необхідний закон руху риштака передається за допомогою приводу, який складається із зубчастого і виконавчого механізмів, розміщених у корпусі. Як виконавчий механізм застосовують важільні механізми, наприклад, двокривошипний, кривошипно-шатунний або кулісний [Н.Г. Копылов. Теория качающихся конвейеров. М-Л: Машгиз, 1963. 188с]. Недоліком цих приводів є те ,що за допомогою важільних механізмів частіше за все не вдається добитися оптимального закону переміщення риштака, який би забезпечував максимальну продуктивність конвеєра. Ця проблема може бути вирішена за рахунок використання в якості ведучої ланки виконавчого механізму кулачка. Найбільш близьким аналогом запропонованому приводу, є привод (патент України №94959 від 10.12.2014, від 30.05.2014 р.), в якому як ведуча ланка виконавчого механізму використаний кулачок, робоча поверхня якого складається з двох ділянок, форми яких забезпечують зворотно-поступальний рух риштака з різними швидкостями, що забезпечує рух маси, що транспортується, в одному напрямку. Недоліком найближчого аналога є невизначеність форми профілю кулачка, що забезпечує оптимальні умови роботи приводу. В основу корисної моделі поставлена задача удосконалення профілю кулачка з метою отримання оптимальних законів переміщення риштака, що забезпечує максимальну продуктивність конвеєра та безударну роботу приводу. Поставлена задача вирішується тим, що привод конвеєра, що коливається, який містить корпус, зубчастий механізм і виконавчий механізм для перетворення обертального руху його ведучої ланки у зворотно-поступальний рух риштака, згідно з корисною моделлю, ведуча ланка виконавчого механізму виконана у вигляді кулачка з роликовим коромислом, профіль якого окреслюється кривими, які забезпечують швидкість руху риштака у формі двох асиметричних синусоїд. Суть корисної моделі пояснюють креслення. На фіг. 1 зображений графік залежності швидкості риштака від кута повороту кулачка у формі двох асиметричних синусоїд. На фіг.2 зображена побудова однієї точки профілю кулачка для відповідного положення риштака. На фіг.3 зображена кінематична схема виконавчого механізму конвеєра. На фіг.4 представлений загальний вигляд привода конвеєра, що коливається. Комп'ютерне моделювання роботи конвеєра,що коливається, показує, що оптимальні результати роботи конвеєра виходять при законах зміни швидкості риштака, представлених на фіг. 1. Графік залежності швидкості риштака U від кута повороту кулачка складається з чотирьох ділянок: а - прискорений рух риштака вперед; б - уповільнений рух риштака вперед; в - прискорений рух риштака назад; г - уповільнений рух риштака назад. Представлені криві є асиметричними синусоїдами, які описуються наступними виразами: при 0 1 Ua U1max sin 4a при 1 2 55 , (1) Ub U1max sin a b 2b 2 , (2) 1 UA 114499 U при 2 3 Uc U2 max sin a b 2c 2 при 3 4 5 10 , (3) . (4) Ud U2 max sin 1 2d 2 При цьому повинні дотримуватися умови: a+b+c+d=1 , (5) ab . (6) U2 max U1max c d Розглянемо алгоритм побудови профілю кулачка, що забезпечує необхідний закон руху риштака. Спочатку в результаті інтегрування виразів (1) - (4) отримаємо залежності лінійної координати положення риштака S від кута повороту кулачка. При 0 1 Sa 4a U1max 1 cos 4a при 1 2 15 , (7) a b Sb 4b U1max cos 4b 4a U1max 2b при 2 3 , (8) a b Sc 4c U2 max cos 1 4a b U1max 2c 4c , (9) при 3 4 20 25 30 35 40 . (10) Sd 4d U2 max cos 4dU2 max 2d 4d Розглянемо алгоритм знаходження точок профілю кулачка графічним способом. Схема визначення представлена на фіг.2. Вихідними даними є: - координати нерухомих осей обертання О і А; - положення напрямної n-n; - розміри ланок важільного механізму: довжина шатуна LBC, довжина мотиля LAB і кут ВАР; - довжина коромисла LAР. Фіксуємо деякий кут , який визначає положення кулачка на одній з чотирьох ділянок і по одній з формул (7) - (10) визначаємо координату положення точки С риштака і будуємо її положення на схемі. Після цього з точки С робимо засічку радіусом L ВС, а з точки А радіусом LAB І отримуємо положення мотиля АВ. Відклавши кут РАВ, отримуємо положення осі коромисла, а відклавши відрізок АР, отримаємо одну з точок профілю кулачка. Виконавши аналогічні побудови для достатньої кількості положень кулачка, можна отримати сукупність точок, що визначають профіль кулачка. Це завдання з великою точністю може бути вирішене за допомогою спеціальної комп'ютерної програми. Таким чином, поставлена задача - удосконалення приводу вирішується за рахунок того, що як ведуча ланка виконавчого механізму корисної моделі використовується кулачок, профіль якого забезпечує закон руху риштака у формі двох асиметричних синусоїд. Корисна модель ілюструється кресленням, де на фіг.3 зображена кінематична схема виконавчого механізму конвеєра, а на фіг. 4 загальний вигляд приводу конвеєра, що коливається. Привод конвеєра, що коливається містить кулачок 1, який контактує з роликом 2 коромисла 3 , елементом якого є мотиль, що зв'язаний за допомогою штанг 4 з риштаком 5. Перераховані елементи приводу разом з зубчастим механізмом 6 розташовані у корпусі 7. 2 UA 114499 U 5 Привод конвеєра працює наступним чином. Кулачок 1, що за допомогою зубчастого механізму 6 обертається навколо своєї осі, через ролик 2 передає рух коромислу 3 з мотилем. Подальше цей рух перетворюється у рух штанги 4 та зворотно-поступальний рух риштака 5. Позитивний ефект полягає у забезпеченні максимальної продуктивності конвеєра та безударної роботи привода. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Привод конвеєра, що коливається, який містить корпус, зубчастий механізм і виконавчий механізм для перетворення обертального руху його ведучої ланки у зворотно-поступальний рух риштака, який відрізняється тим, що ведуча ланка виконавчого механізму виконана у вигляді кулачка з роликовим коромислом, профіль якого окреслюється кривими, які забезпечують швидкість руху риштака у формі двох асиметричних синусоїд. 3 UA 114499 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B65G 25/04
Мітки: конвеєра, привод, коливається
Код посилання
<a href="https://ua.patents.su/6-114499-privod-konveehra-shho-kolivaehtsya.html" target="_blank" rel="follow" title="База патентів України">Привод конвеєра, що коливається</a>
Привод конвеєра, що коливається
Номер патенту: 94959
Опубліковано: 10.12.2014
Автори: Гринько Артем Григорович, Владіміров Едуард Олександрович, Лозовий Володимир Сергійович
МПК: B65G 25/00
Мітки: привод, конвеєра, коливається
Формула / Реферат:
Привод конвеєра, що коливається, який містить корпус, зубчастий механізм і виконавчий механізм для перетворення обертального руху його ведучої ланки у зворотно-поступальний рух риштака, який відрізняється тим, що ведуча ланка виконавчого механізму виконана у вигляді кулачка з роликовим коромислом та геометричним замиканням.
Оглядовий риштак скребкового конвеєра
Номер патенту: 83278
Опубліковано: 25.06.2008
Автори: Висоцький Генадій Васильович, Леусенко Анатолій Васильович, Бабенко Микола Павлович
МПК: B65G 19/28
Мітки: риштак, скребкового, оглядовий, конвеєра
Формула / Реферат:
1. Оглядовий риштак шахтного скребкового конвеєра складається з прокатних чи литих боковин риштака, зварених між собою верхнім і нижнім листами, який відрізняється тим, що верхнє днище риштака виконано з двох частин у вигляді листів, між якими по середині риштака утворено отвір оглядового вікна, який закривається плоскою кришкою-шибером, з одного торця до якої приварені дві циліндричні втулки з прорізями по осях, а знизу листа кришки-шибера...
Завантажувальний патрубок гвинтового конвеєра
Номер патенту: 61435
Опубліковано: 17.11.2003
Автори: Гевко Роман Богданович, Розум Руслан Іванович
МПК: B65G 33/24, B65G 33/16
Мітки: патрубок, завантажувальний, гвинтового, конвеєра
Формула / Реферат:
1. Завантажувальний патрубок гвинтового конвеєра, що містить гвинтову спіраль, яка розміщена в циліндричному обмежувачі з просівними вікнами, що переходить в еластичний кожух, який відрізняється тим, що вихідний вал гвинтової спіралі через кулачковий механізм зв’язаний з активними збуджуючими елементами, виконаними у вигляді роликів і розташованими над зовнішньою поверхнею циліндричного обмежувача.2. Завантажувальний патрубок...
Двигун з робочим органом, що коливається
Номер патенту: 36687
Опубліковано: 10.11.2008
Автор: Святненко Віктор Олександрович
МПК: F02B 53/00
Мітки: коливається, робочим, двигун, органом
Формула / Реферат:
Двигун з робочим органом, що коливається, який містить корпус, на внутрішній циліндричній поверхні якого розміщені радіальні перегородки, що взаємодіють із встановленим всередині нього ротором з поршнями, з′єднаними з валом відбору потужності, шестернями й кривошипно-шатунним механізмом, впускні й випускні канали, який відрізняється тим, що кривошипно-шатунний механізм двигуна з′єднаний з ротором й розміщений всередині останнього,...
Пристрій для фіксації ланцюга скребкового конвеєра
Номер патенту: 58219
Опубліковано: 11.04.2011
Автори: Варченко Наталія Юріївна, Іваненко Олександр Михайлович, Авєршина Наталія Олександрівна, Варченко Юрій Едуардович
МПК: B65G 23/00
Мітки: ланцюга, фіксації, пристрій, скребкового, конвеєра
Формула / Реферат:
Пристрій для фіксації ланцюга скребкового конвеєра, що містить храповий механізм в приводному блоці, натягувальний риштак з подовжнім вирізом і перемичку, виконану у вигляді горизонтальноїскоби, відігнутий донизу кінець якої утворює фіксатор холостої гілки, а верхній фіксатор робочої гілки виконаний у вигляді упора, розташованого посередині скоби, при цьому опорна плита закріплена у вирізі на нижній поверхні скоби, який відрізняється тим, що...
Попередній патент: Спосіб превентивного інтраопераційного знеболення пахової лімфодисекції
Наступний патент: Склад наплавленого металу
Випадковий патент: Середовище для консервування сперми та спосіб його приготування