Робот-маніпулятор для візуально-оптичного обстеження трубопроводу з визначенням наявності газів
Номер патенту: 116008
Опубліковано: 10.05.2017
Автори: Гнєдов Олег Борисович, Єгоров Олександр Олександрович, Дацун Сергій Валентинович, Ніколенко Олександр Сергійович
Формула / Реферат
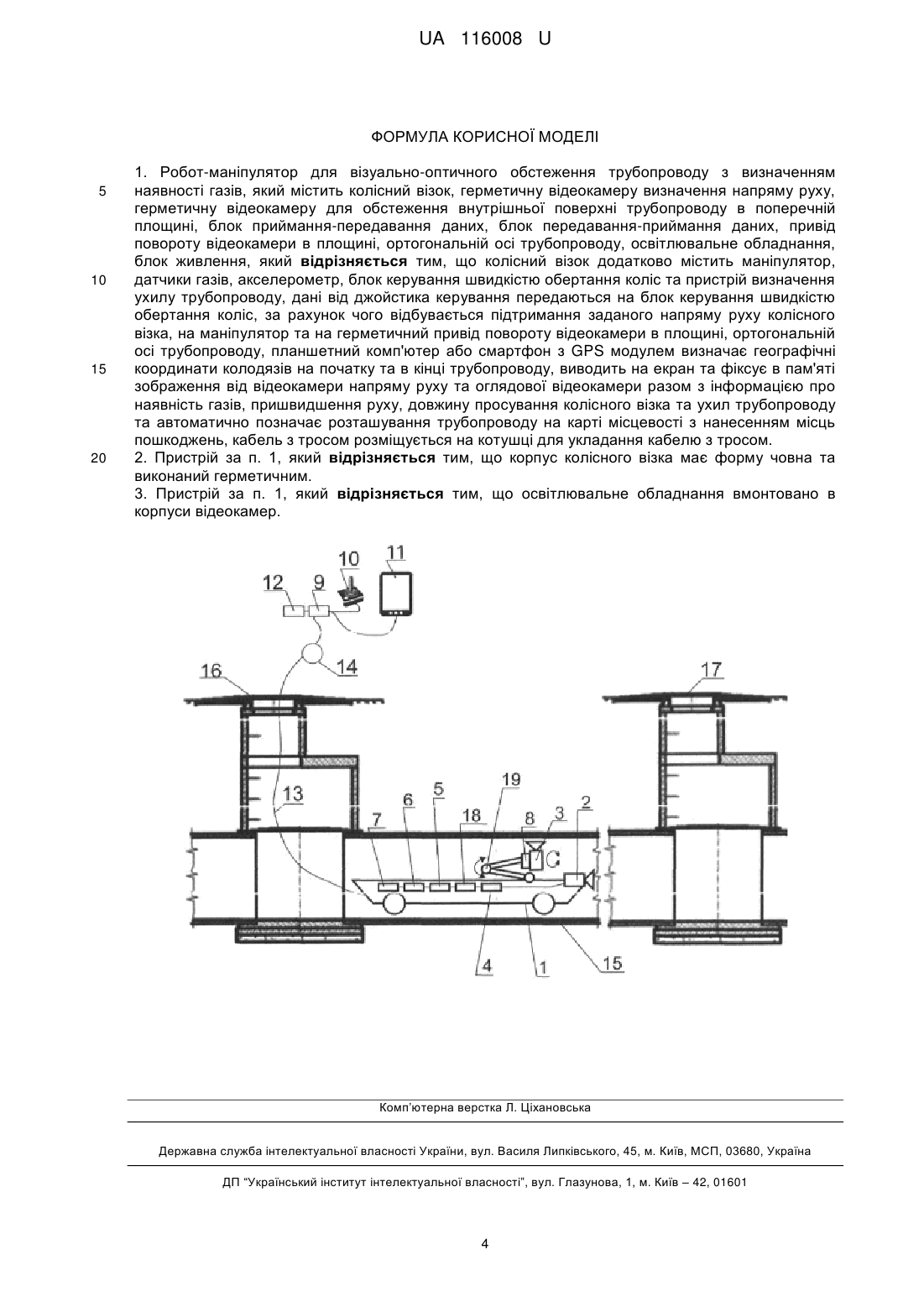
1. Робот-маніпулятор для візуально-оптичного обстеження трубопроводу з визначенням наявності газів, який містить колісний візок, герметичну відеокамеру визначення напряму руху, герметичну відеокамеру для обстеження внутрішньої поверхні трубопроводу в поперечній площині, блок приймання-передавання даних, блок передавання-приймання даних, привід повороту відеокамери в площині, ортогональній осі трубопроводу, освітлювальне обладнання, блок живлення, який відрізняється тим, що колісний візок додатково містить маніпулятор, датчики газів, акселерометр, блок керування швидкістю обертання коліс та пристрій визначення ухилу трубопроводу, дані від джойстика керування передаються на блок керування швидкістю обертання коліс, за рахунок чого відбувається підтримання заданого напряму руху колісного візка, на маніпулятор та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу, планшетний комп'ютер або смартфон з GPS модулем визначає географічні координати колодязів на початку та в кінці трубопроводу, виводить на екран та фіксує в пам'яті зображення від відеокамери напряму руху та оглядової відеокамери разом з інформацією про наявність газів, пришвидшення руху, довжину просування колісного візка та ухил трубопроводу та автоматично позначає розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень, кабель з тросом розміщується на котушці для укладання кабелю з тросом.
2. Пристрій за п. 1, який відрізняється тим, що корпус колісного візка має форму човна та виконаний герметичним.
3. Пристрій за п. 1, який відрізняється тим, що освітлювальне обладнання вмонтовано в корпуси відеокамер.
Текст
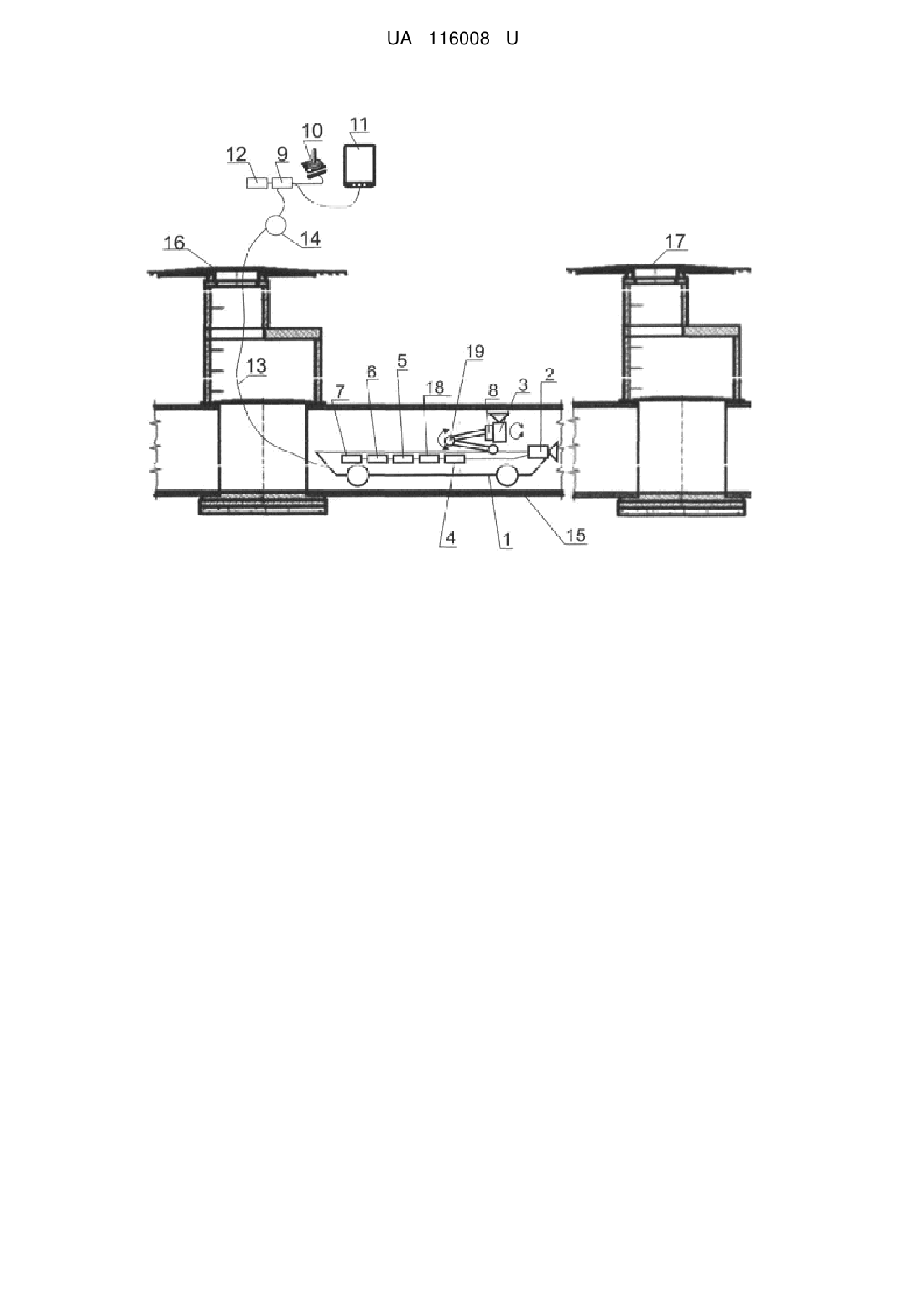
Реферат: Робот-маніпулятор для візуально-оптичного обстеження трубопроводу з визначенням наявності газів містить колісний візок, герметичну відеокамеру визначення напряму руху, герметичну відеокамеру для обстеження внутрішньої поверхні трубопроводу в поперечній площині, блок приймання-передавання даних, блок передавання-приймання даних, привід повороту відеокамери в площині, ортогональній осі трубопроводу, освітлювальне обладнання, блок живлення. Колісний візок додатково містить маніпулятор, датчики газів, акселерометр, блок керування швидкістю обертання коліс та пристрій визначення ухилу трубопроводу. Дані від джойстика керування передаються на блок керування швидкістю обертання коліс, за рахунок чого відбувається підтримання заданого напряму руху колісного візка, на маніпулятор та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу. Планшетний комп'ютер або смартфон з GPS модулем визначає географічні координати колодязів на початку та в кінці трубопроводу, виводить на екран та фіксує в пам'яті зображення від відеокамери напряму руху та оглядової відеокамери разом з інформацією про наявність газів, пришвидшення руху, довжину просування колісного візка та ухил трубопроводу та автоматично позначає розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень. Кабель з тросом розміщується на котушці для укладання кабелю з тросом. UA 116008 U (12) UA 116008 U UA 116008 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв, які направляються в трубах за допомогою рушіїв та мають маніпулятори, змонтовані на візках, та може бути використана для телеінспекції внутрішньої поверхні трубопроводу великого діаметра з визначенням наявності газів і може бути використана у різних галузях промисловості та комунальному господарстві. В даний час використовуються роботи для телеінспекції труб у вигляді візків, які оснащені однією камерою і управляються з пульта оператора по кабелю. (Керований телеінспекційний робот Steerable pipe ranger-http://www.z-tec.ru/index/catalogue/showitem.php?=416). (Робот для телеінспекції труб Inventor Industries-http://mastertols-pro.ru/mobil-naya-teleinspektscionnayalaboratoriya/robot-dlya-teleinspektsii-trub-inventor-industries-uk.hml). (Робот для телеінспекції трубопроводу Т 66-http://mastertools-pro.ru/vmchk/mobil-naya-teleinspektscionnayalaboratoriya/robot-dlya-teleinspektscii-truboprovoda-t-66.html). Перевага цих пристроїв - можливість управління роботом і проведення телеінспекції при знаходженні оператора і записуючого обладнання зовні трубопроводу. Недоліками цих пристроїв є: недостатня якість візуалізації великих діаметрів інспектованих трубопроводів через використання однієї камери; низька точність визначення місця розташування дефекту стінки трубопроводу, обумовлена тим, що одна камера одночасно виконує огляд курсу пересування і огляд стінки трубопроводу, пристрої можливо використовувати тільки в спорожненому трубопроводі, не має можливості автоматичного позначення трубопроводу на карті місцевості, не визначається наявність газів в трубопроводі. Також відомий спосіб шляхового обстеження та діагностики недіючих магістральних трубопроводів та система для його здійснення (патент Російської Федерації на винахід № 2216685, дата публікації 20.11.2003, Бюл. № 32), який полягає в телеінспекції обстежуваного об'єкта, при цьому в трубопровід вводять вологозахищену, що витримує тиск до 25 атм. відеокамеру типу VB21C-R36 або KPC-190SW в герметичному титановому корпусі з кутом огляду 92 градуси, захищену полірованим склом типу К8 товщиною 15 мм і з межею міцності на вигин близько 17,0 МПа, забезпечену галогенними світильниками, встановлену на горизонтальну платформу, виконану з брусків хвойних порід дерева, просочених в киплячому індустріальному маслі, на відстані 5-15 см від переднього краю по її центральній лінії, причому платформа має товщину 80 мм, а відношення довжини до ширини 3:1, а обсяг її має співвідношення до діаметра трубопроводу як 1:4, платформа просувається на чотирьох колесах, два передніх з яких є лопатевими, що працюють від електромотора, а два задніх підтримують, а слідом за платформою рухається трижильний кабель живлення, пов'язаний з відеокамерою, який має подвійну ізоляцію і забезпечує зв'язок з наземною записуючої цифровою відеокамерою типу DCR-TRV 17E Sony з монітором 3,5 дюйма або їй подібної, причому інформація, яка надходить на наземну відеокамеру, супроводжується коментарями через мікрофон. Крім того, трижильний живильний кабель містить знаки довжини пройденої відстані. Перевагою цього способу є: можливість управління роботом і проведення оперативноїтелеінспекції трубопроводу з можливістю проведення запису на захищену цифрову відеокамеру, яка вмонтована в герметичний корпус візка, а конструкція візка дозволяє використовувати систему в частково заповнених рідиною трубопроводах. Недоліками цього способу є: недостатня якість візуалізації великих діаметрів інспектованих трубопроводів через неможливість наближення відеокамери до внутрішньої поверхні трубопроводу; низька точність визначення довжини пройденої відстані до місця розташування дефекту стінки трубопроводу, обумовлена тим, що знаки довжини відстані нанесені на кабелі, не має можливості автоматичного позначення розташування трубопроводу на карті місцевості, не визначається наявність газів в трубопроводі. Найбільш близьким пристроєм для обстеження трубопроводів, є робототехнічна система інспекції трубопроводу (патент Російської Федерації на корисну модель № 133896, дата публікації 27.10.2013, Бюл. № 30), що містить засіб переміщення у вигляді колісного візка, встановлені на засобі переміщення камери, освітлювальне обладнання, приймальнопередавальний пристрій. Поза трубопроводу розміщені передавально-приймальний пристрій, блок управління, блок реєстрації, монітор, блок живлення. Передавально-приймальний пристрій і приймально-передавальний пристрій пов'язані по радіохвильовому каналу. Засіб пересування виконано у вигляді візка. Одна з камер - курсова, встановлена з можливістю огляду курсу переміщення візка, а інша з камер - оглядова, встановлена з можливістю огляду стінки труби в поперечній площині і забезпечена приводом її повороту. Ходові механізми візка забезпечені енкодерами і їх вихід приєднаний до інформаційного входу приймально-передавального пристрою. 1 UA 116008 U 5 10 15 20 25 30 35 40 45 50 55 60 Перевагою цього пристрою є: підвищення якості візуалізації стінки трубопроводу і точність визначення місця розташування дефекту для трубопроводів великих діаметрів, спрощена конструкція. Недоліками цього пристрою є: неможливість використання в напівзаповнених рідиною трубопроводах, наприклад в працюючих каналізаційних колекторах; не має можливості регулювання положення оглядової відеокамери в залежності від діаметра трубопроводу, не має можливості автоматичного позначення розташування трубопроводу на карті місцевості, не визначається наявність газів в трубопроводі, не визначається ухил трубопроводу. Цей пристрій, як найбільш близький за технічною суттю і функціональному призначенню, прийнятий як найближчий аналог. В основу корисної моделі поставлена задача створити робот-маніпулятор для візуальнооптичного обстеження трубопроводу з визначенням наявності газів шляхом удосконалення конструкції колісного візка та пульту керування з системою обробки інформації, яка б дозволила за рахунок маніпулятора з встановленою відеокамерою проводити телеінспекцію внутрішньої поверхні трубопроводу великого діаметра як в спорожнених, так і в напівзаповнених рідиною трубопроводах, наприклад працюючих самопливних каналізаційних колекторах, визначати точне розташування та візуально-оптичне обстеження місця пошкодження трубопроводу з можливістю відеофіксації та збереження отриманих даних, визначати ухил трубопроводу, визначати наявність в трубопроводі газів, наприклад вуглецю, сірководню або метану, які можуть приводити до руйнації внутрішньої поверхні трубопроводу за рахунок газової корозії та можуть бути небезпечними при проведенні робіт, а також автоматично позначати розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень. Поставлена задача вирішується роботом-маніпулятором для візуально-оптичного обстеження трубопроводу з визначенням наявності газів, що містить колісний візок, герметичну відеокамеру визначення напряму руху, герметичну відеокамеру для обстеження внутрішньої поверхні трубопроводу в поперечній площині, блок приймання-передавання даних, блок передавання-приймання даних, привід повороту відеокамери в площині, ортогональній осі трубопроводу, освітлювальне обладнання, блок живлення, у якому, згідно з корисною моделлю, колісний візок додатково містить маніпулятор, датчики газів, акселерометр, блок керування швидкістю обертання коліс та пристрій визначення ухилу трубопроводу, дані від джойстика керування передаються на блок керування швидкістю обертання коліс, за рахунок чого відбувається підтримання заданого напряму руху колісного візка, на маніпулятор та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу, планшетний комп'ютер або смартфон з GPS модулем визначає географічні координати колодязів на початку та в кінці трубопроводу, виводить на екран та фіксує в пам'яті зображення від відеокамери напряму руху та оглядової відеокамери разом з інформацією про наявність газів, пришвидшення руху, довжину просування колісного візка та ухил трубопроводу та автоматично позначає розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень, кабель з тросом розміщується на котушці для укладання кабелю з тросом. Корпус колісного візка має форму човна та виконаний герметичним. Освітлювальне обладнання вмонтовано в корпуса відеокамер. Загальними ознаками найближчого аналога і корисної моделі, що заявляється, є наступні: - колісний візок; - герметична відеокамера визначення напряму руху; - герметична відеокамера для обстеження внутрішньої поверхні трубопроводу в поперечній площині; - блок приймання-передавання даних; - блок передавання-приймання даних; - привід повороту відеокамери в площині, ортогональній осі трубопроводу; - освітлювальне обладнання. Відмітними ознаками є наступні: - колісний візок додатково містить маніпулятор, датчики газів, акселерометр, блок керування швидкістю обертання коліс та пристрій визначення ухилу трубопроводу; - дані від джойстика керування передаються на блок керування швидкістю обертання коліс, за рахунок чого відбувається підтримання заданого напряму руху колісного візка, на маніпулятор та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу; - планшетний комп'ютер або смартфон з GPS модулем визначає географічні координати колодязів на початку та в кінці трубопроводу, виводить на екран та фіксує в пам'яті зображення від відеокамери напряму руху та оглядової відеокамери разом з інформацією про наявність 2 UA 116008 U 5 10 15 20 25 30 35 40 45 50 55 газів, пришвидшення руху, довжину просування колісного візка та ухил трубопроводу та автоматично позначає розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень; - кабель з тросом розміщується на котушці для укладання кабелю з тросом. Окрім цього, корпус колісного візка має форму човна та виконаний герметичним. Освітлювальне обладнання вмонтовано в корпус відеокамер. Причинно-наслідковий зв'язок між достатніми у всіх випадках істотними ознаками корисної моделі і отриманими підсумковими технічними результатами забезпечують нові технічні властивості, дозволяючи в сполученні з відомими ознаками отримати технічні результати, означені в постановці задачі. Корисна модель, що заявляється, пояснюється, але не обмежується кресленням, де представлено функціональну схему робота-маніпулятора для візуально-оптичного обстеження трубопроводу з визначенням наявності газів. Корисна модель робота-маніпулятора для візуально-оптичного обстеження трубопроводу з визначенням наявності газів, містить колісний візок (1), герметичну відеокамеру напряму руху з освітлювальним обладнанням (2), герметичну оглядову відеокамеру з освітлювальним обладнанням для обстеження внутрішньої поверхні трубопроводу в поперечній площині (3), маніпулятор (19), датчики газу (4), акселерометр (5), блок керування швидкістю обертів коліс (6), блок приймання-передавання даних (7), герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу (8), пристрій визначення ухилу трубопроводу (18), блок передавання-приймання даних та обробки інформації (9), джойстик керування (10), планшетний комп'ютер або смартфон з GPS модулем (11), блок живлення (12), кабель з тросом (13), котушку для укладання кабелю з тросом (14). Підготовка до роботи здійснюється наступним чином: на ділянці обстежуваного трубопроводу (15) за допомогою планшетного комп'ютера або смартфона з GPS модулем (11) визначаються географічні координати колодязя на початку трубопроводу (16) та колодязя в кінці трубопроводу (17), після чого до блока передавання-приймання даних та обробки інформації (9) приєднується джойстик керування (10), блок живлення (12), планшетний комп'ютер або смартфон з GPS модулем (11) та один кінець кабелю з тросом (13) інший кінець якого приєднується до колісного візка (1), причому кабель з тросом (13) розміщується на котушці для укладання кабелю з тросом (14). Працює робот для візуально-оптичного обстеження трубопроводу з визначенням наявності газів наступним чином: колісний візок (1) вводиться через колодязь на початку трубопроводу (16) до обстежуваного трубопроводу (15), далі рухом колісного візка (1) вдовж трубопроводу управляє оператор за допомогою джойстика керування (10), при цьому зображення від герметичної відеокамери напряму руху з освітлювальним обладнанням (2) та зображення від герметичної оглядової відеокамери з освітлювальним обладнанням для обстеження внутрішньої поверхні трубопроводу в поперечній площині (3) виводиться на екран планшетного комп'ютера або смартфона з GPS модулем (11), крім того, від блока приймання-передавання даних (7) на блок передавання-приймання даних та обробки інформації (9) надходить та виводиться на екран планшетного комп'ютера або смартфона з GPS модулем (11) інформація від датчиків газів (4), які визначають наявність газів в трубопроводі (15), від пристрою визначення ухилу трубопроводу (18), який визначає ухил трубопроводу, та від акселерометра (5), який визначає пришвидшення та довжину просування колісного візка (1), а дані від джойстика керування (10), через блок передавання-приймання даних та обробки інформації (9) та блок приймання-передавання даних (7) передаються на блок керування швидкістю обертання коліс (6), за рахунок чого відбувається підтримання заданого напряму руху колісного візка (1), на маніпулятор (19), який забезпечує наближення до стінки трубопроводу (15) герметичної оглядової відеокамери з освітлювальним обладнанням для обстеження внутрішньої поверхні трубопроводу в поперечній площині (3) та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу (8), за рахунок чого забезпечується висока якість візуалізації внутрішньої поверхні інспектованих трубопроводів. Після досягнення колісним візком (1) колодязя в кінці трубопроводу (17), обстеження трубопроводу припиняється. Отримані в процесі обстеження дані обробляються комп'ютерною програмою та зберігаються в пам'яті планшетного комп'ютера або смартфона з GPS модулем (11), причому автоматично позначається розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень. Таким чином, корисна модель, що пропонується для захисту, має конструктивні та експлуатаційні переваги над відомою за найближчим аналогом конструкцією. 3 UA 116008 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 1. Робот-маніпулятор для візуально-оптичного обстеження трубопроводу з визначенням наявності газів, який містить колісний візок, герметичну відеокамеру визначення напряму руху, герметичну відеокамеру для обстеження внутрішньої поверхні трубопроводу в поперечній площині, блок приймання-передавання даних, блок передавання-приймання даних, привід повороту відеокамери в площині, ортогональній осі трубопроводу, освітлювальне обладнання, блок живлення, який відрізняється тим, що колісний візок додатково містить маніпулятор, датчики газів, акселерометр, блок керування швидкістю обертання коліс та пристрій визначення ухилу трубопроводу, дані від джойстика керування передаються на блок керування швидкістю обертання коліс, за рахунок чого відбувається підтримання заданого напряму руху колісного візка, на маніпулятор та на герметичний привід повороту відеокамери в площині, ортогональній осі трубопроводу, планшетний комп'ютер або смартфон з GPS модулем визначає географічні координати колодязів на початку та в кінці трубопроводу, виводить на екран та фіксує в пам'яті зображення від відеокамери напряму руху та оглядової відеокамери разом з інформацією про наявність газів, пришвидшення руху, довжину просування колісного візка та ухил трубопроводу та автоматично позначає розташування трубопроводу на карті місцевості з нанесенням місць пошкоджень, кабель з тросом розміщується на котушці для укладання кабелю з тросом. 2. Пристрій за п. 1, який відрізняється тим, що корпус колісного візка має форму човна та виконаний герметичним. 3. Пристрій за п. 1, який відрізняється тим, що освітлювальне обладнання вмонтовано в корпуси відеокамер. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 9/10, B25J 13/00, G01N 21/954, B25J 19/02, F16L 55/28, B25J 5/00
Мітки: газів, наявності, візуально-оптичного, визначенням, трубопроводу, робот-маніпулятор, обстеження
Код посилання
<a href="https://ua.patents.su/6-116008-robot-manipulyator-dlya-vizualno-optichnogo-obstezhennya-truboprovodu-z-viznachennyam-nayavnosti-gaziv.html" target="_blank" rel="follow" title="База патентів України">Робот-маніпулятор для візуально-оптичного обстеження трубопроводу з визначенням наявності газів</a>
Устаткування для шляхового обстеження внутрішньої поверхні трубопроводу
Номер патенту: 36297
Опубліковано: 16.04.2001
Автори: Грошенко Микола Олександрович, Вілесов Юрій Федотович
МПК: F17D 5/06
Мітки: обстеження, поверхні, трубопроводу, шляхового, внутрішньої, устаткування
Текст:
...світла; 13 -- матриця фотоприймачів, які оптично зв'язані між собою крізь плівку MOM (9), поляризатор (14) і оптичну систему формування зображення (15), матриця фотоприймачів електричне зв'язана з електронними блоками (16). Устаткування працює наступним чином. Герметичний контейнер (2) устаткування для шляхового обстеження внутрішньої поверхні трубопроводу розповсюджується всередині трубопроводу. Датчики (3) заміру глибини дефекту і...
Устаткування для шляхового обстеження внутрішньої поверхні трубопроводу
Номер патенту: 36298
Опубліковано: 16.04.2001
Автори: Грошенко Микола Олександрович, Вілесов Юрій Федотович
МПК: F17D 5/06
Мітки: устаткування, шляхового, поверхні, трубопроводу, внутрішньої, обстеження
Текст:
...які оптично зв'язані між собою крізь другий герметичний контейнер 6, другий герметичний контейнер 6 розміщено над ділянкою магнітного потоку, що сформувався у стінці трубопроводу, 11 - електронні блоки. На фіг. 2 представлена оптична схема розташування вузлів устаткування всередині другого герметичного контейнера 6: 12 - прозора грань другого герметичного контейнера, 13 - напівсферична лінза, яка розташована на прозорій грані...
Спосіб визначення наявності і кількості витоків із відрізка напірного трубопроводу
Номер патенту: 32003
Опубліковано: 15.12.2000
Автори: Петросов Валерій Альбертович, Гончарук Володимир Степанович, Чорний Анатолій Петрович, Магеря Афанасій Антонович
МПК: F17D 5/02
Мітки: відрізка, визначення, наявності, кількості, трубопроводу, спосіб, напірного, витоків
Текст:
...частиною подачі Із цього відрізка в відгалуження розподільної мережі ^керуючись рівнянням першого закону КІрхгофа; баланс подач, [ 2 ] fзаміряють подачу 2Q^ = ^i виражаючим на початку Qn І в КІНЦІ відрізка водонапірного трубопровіда (^.використовуючи переносний безконтактний витратомІр-лІчильникД розраховують різницю цих подач яка с І € витоками» Ця сук упність нових суттєвих ознак у взаємодії з відомими дозволяє визначення наявності...
Самохідний маніпулятор для дробоструминного очищення
Номер патенту: 109105
Опубліковано: 10.08.2016
Автори: Чернявський Анатолій Миколайович, Шулянський Григорій Анатолійович, Горик Олексій Володимирович, Брикун Олександр Миколайович, Черняк Роман Євгенійович, Ковальчук Станіслав Богданович
МПК: B25J 11/00
Мітки: очищення, маніпулятор, дробоструминного, самохідний
Формула / Реферат:
1. Самохідний маніпулятор (СМ) для дробеструменевого очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробеструменевого сопла, систему керування і тримач дробеструменевого сопла, який відрізняється тим, що механізм...
Гідравлічний кран-маніпулятор
Номер патенту: 3977
Опубліковано: 15.12.2004
Автори: Бондаренко Борис Маврович, Радкевич Анатолій Валентинович, Яковлєв Сергій Олександрович
МПК: B66C 23/08, B66C 23/04
Мітки: гідравлічний, кран-маніпулятор
Формула / Реферат:
Гідравлічний кран-маніпулятор, що містить поворотну стійку з встановленою на ній телескопічною стрілою, вантажозахватним органом, слідкуючою системою, гідравлічним приводом та електронною системою управління, який відрізняється тим, що він установлений на самохідному шасі, оголовок його стріли виконаний у вигляді кутової секції зі з'єднуючою обоймою, фіксуючою віссю, гідроциліндром нахилу кутової секції, крім цього, кран має блок...
Попередній патент: Спосіб експрес ідентифікації спектрів ядерного квадрупольного резонансу
Наступний патент: Робот для візуально-оптичного обстеження трубопроводу з визначенням наявності газів
Випадковий патент: Автобалансуючий пристрій для зрівноваження роторів із похилою віссю обертання